MOVO falls over in Gazebo #73
Comments
|
Hi @zkytony, We can reproduce your problem. It is likely a gazebo plugin that is causing physic to "freeze" a part of the MOVO. We are exploring the possible cause causes for this. Tested onOS: Ubuntu 16.04 Observed behaviorA part on the top of the MOVO seems to get freezed in place. (zeroed velocity) PrognosticThe fact that the problem is inconsistent let me believe that the configuration is fine. This is most likely a problem with Gazebo itself. We will still look for a solution. |
|
We saw a similar thing happen. A quick fix is to increase the mass of the base of the robot. In the urdf, it'd listed as 40 kg, but in reality its closer to 80 kg or so. we fixed it in our fork in this PR: |
Description
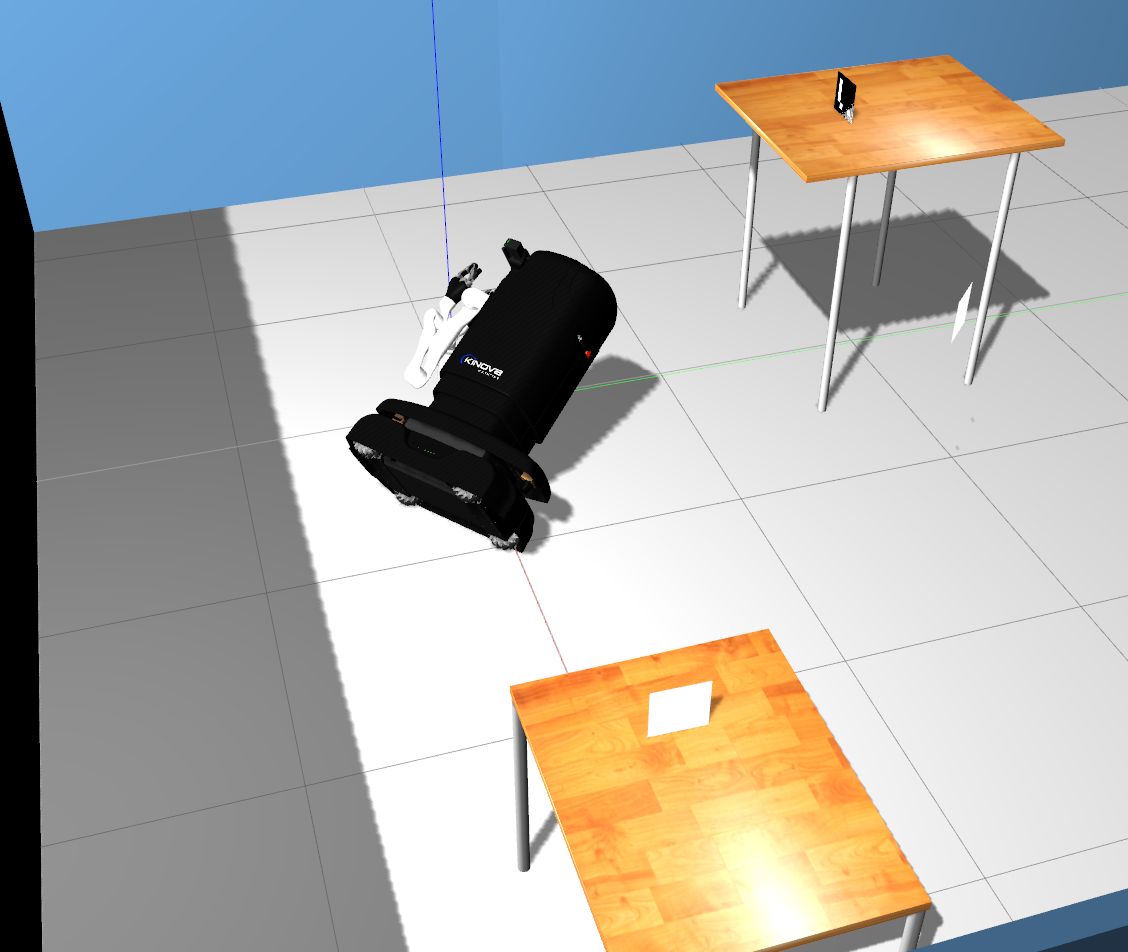
During navigation in Gazebo, MOVO tends to fall over when rotating, as shown in the image below. This happens frequently and it cannot navigate reliably.
I have tried:
max_accelerationin eband_planner_params.yaml from2.5to0.5.move_base.urdf.xacrofrom44.2877to100.The frequency of fall over is reduced after these changes, but the robot still falls over unpredictably.
Has anyone encountered this problem?
Version
Branch: kinetic-devel
Configuration: double arm, 7DOFs.
Provide the branch you are working on, the packages you are using, etc.
Movo's configuration (No arm, single arm, double arm, 6DOF, 7DOF-S)
Steps to reproduce
test_zonegazebo environmentmap_nav.launch.movo_move_baseaction client to send a few waypoints to navigate.Expected behavior
If the real robot doesn't fall that frequently, the simulation shouldn't either.
The text was updated successfully, but these errors were encountered: