线段树(Segment Tree):一种基于分治思想的二叉树,用于在区间上进行信息统计。它的每一个节点都对应一个区间
$[left, right]$ ,$left$、$right$ 通常是整数。每一个叶子节点表示了一个单位区间(长度为$1$ ),叶子节点对应区间上$left == right$ 。每一个非叶子节点$[left, right]$ 的左子节点表示的区间都为$[left, (left + right) / 2]$ ,右子节点表示的的区间都为$[(left + right) / 2 + 1, right]$ 。
线段树是一棵平衡二叉树,树上的每个节点维护一个区间。根节点维护的是整个区间,每个节点维护的是父亲节点的区间二等分之后的其中一个子区间。当有
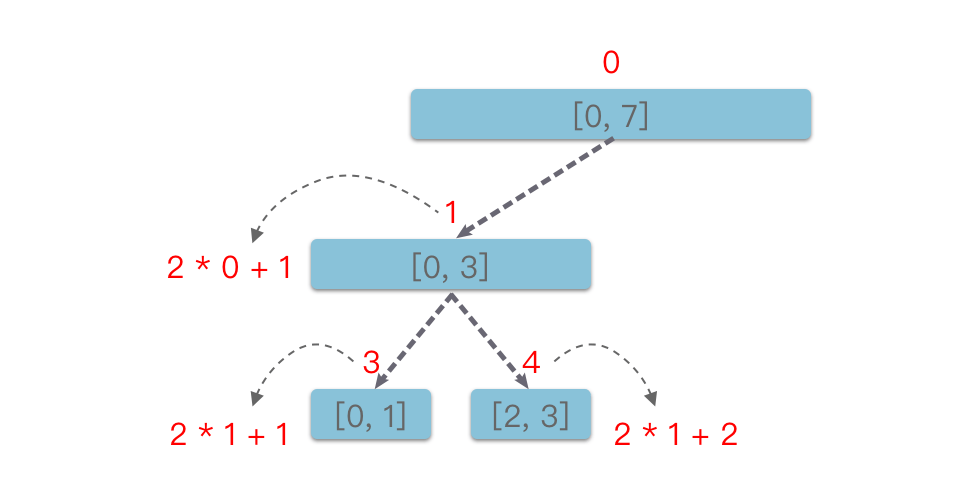
如下图所示,这是一棵区间为
![区间 [0, 7] 对应的线段树](https://qcdn.itcharge.cn/images/20240511173328.png)
根据上述描述,我们可以总结一下线段树的特点:
- 线段树的每个节点都代表一个区间。
- 线段树具有唯一的根节点,代表的区间是整个统计范围,比如
$[1, n]$ 。 - 线段树的每个叶子节点都代表一个长度为
$1$ 的单位区间$[x, x]$ 。 - 对于每个内部节点
$[left, right]$ ,它的左子节点是$[left, mid]$ ,右子节点是$[mid + 1, right]$ 。其中$mid = (left + right) / 2$ (向下取整)。
之前我们学习过二叉树的两种存储结构,一种是「链式存储结构」,另一种是「顺序存储结构」。线段树也可以使用这两种存储结构来实现。
由于线段树近乎是完全二叉树,所以很适合用「顺序存储结构」来实现。
我们可以采用与完全二叉树类似的编号方法来对线段树进行编号,方法如下:
- 根节点的编号为
$0$ 。 - 如果某二叉树节点(非叶子节点)的下标为
$i$ ,那么其左孩子节点下标为$2 \times i + 1$ ,右孩子节点下标为$2 \times i + 2$ 。 - 如果某二叉树节点(非根节点)的下标为
$i$ ,那么其父节点下标为$(i - 1) // 2$ ,$//$ 表示整除。
这样我们就能使用一个数组来保存线段树。那么这个数组的大小应该设置为多少才合适?
- 在理想情况下,$n$ 个单位区间构成的线段树是一棵满二叉树,节点数为
$n + n/2 + n/4 + ... + 2 + 1 = 2 \times n - 1$ 个。 因为$2 \times n - 1 < 2 \times n$ ,所以在理想情况下,只需要使用一个大小为$2 \times n$ 的数组来存储线段树就足够了。 - 但是在一般情况下,有些区间元素需要开辟新的一层来存储元素。线段树的深度为
$\lceil \log_2n \rceil$ ,最坏情况下叶子节点(包括无用的节点)的数量为$2^{\lceil \log_2n \rceil}$ 个,总节点数为$2^{\lceil \log_2n \rceil + 1} - 1$ 个,可以近似看做是$4 * n$ ,所以我们可以使用一个大小为$4 \times n$ 的数组来存储线段树。
通过上图可知:下标为
- 如果是叶子节点($left == right$),则节点的值就是对应位置的元素值。
- 如果是非叶子节点,则递归创建左子树和右子树。
- 节点的区间值(区间和、区间最大值、区间最小值)等于该节点左右子节点元素值的对应计算结果。
线段树的构建实现代码如下:
# 线段树的节点类
class TreeNode:
def __init__(self, val=0):
self.left = -1 # 区间左边界
self.right = -1 # 区间右边界
self.val = val # 节点值(区间值)
self.lazy_tag = None # 区间和问题的延迟更新标记
# 线段树类
class SegmentTree:
def __init__(self, nums, function):
self.size = len(nums)
self.tree = [TreeNode() for _ in range(4 * self.size)] # 维护 TreeNode 数组
self.nums = nums # 原始数据
self.function = function # function 是一个函数,左右区间的聚合方法
if self.size > 0:
self.__build(0, 0, self.size - 1)
# 构建线段树,节点的存储下标为 index,节点的区间为 [left, right]
def __build(self, index, left, right):
self.tree[index].left = left
self.tree[index].right = right
if left == right: # 叶子节点,节点值为对应位置的元素值
self.tree[index].val = self.nums[left]
return
mid = left + (right - left) // 2 # 左右节点划分点
left_index = index * 2 + 1 # 左子节点的存储下标
right_index = index * 2 + 2 # 右子节点的存储下标
self.__build(left_index, left, mid) # 递归创建左子树
self.__build(right_index, mid + 1, right) # 递归创建右子树
self.__pushup(index) # 向上更新节点的区间值
# 向上更新下标为 index 的节点区间值,节点的区间值等于该节点左右子节点元素值的聚合计算结果
def __pushup(self, index):
left_index = index * 2 + 1 # 左子节点的存储下标
right_index = index * 2 + 2 # 右子节点的存储下标
self.tree[index].val = self.function(self.tree[left_index].val, self.tree[right_index].val)这里的 function 指的是线段树区间合并的聚合方法。可以根据题意进行变化,常见的操作有求和、取最大值、取最小值等等。
线段树的基本操作主要涉及到单点更新、区间查询和区间更新操作。下面我们来进行一一讲解。
线段树的单点更新:修改一个元素的值,例如将
$nums[i]$ 修改为$val$ 。
我们可以采用递归的方式进行单点更新,具体步骤如下:
- 如果是叶子节点,满足
$left == right$ ,则更新该节点的值。 - 如果是非叶子节点,则判断应该在左子树中更新,还是应该在右子树中更新。
- 在对应的左子树或右子树中更新节点值。
- 左右子树更新返回之后,向上更新节点的区间值(区间和、区间最大值、区间最小值等),区间值等于该节点左右子节点元素值的聚合计算结果。
线段树的单点更新实现代码如下:
# 单点更新,将 nums[i] 更改为 val
def update_point(self, i, val):
self.nums[i] = val
self.__update_point(i, val, 0, 0, self.size - 1)
# 单点更新,将 nums[i] 更改为 val。节点的存储下标为 index,节点的区间为 [left, right]
def __update_point(self, i, val, index, left, right):
if self.tree[index].left == self.tree[index].right:
self.tree[index].val = val # 叶子节点,节点值修改为 val
return
mid = left + (right - left) // 2 # 左右节点划分点
left_index = index * 2 + 1 # 左子节点的存储下标
right_index = index * 2 + 2 # 右子节点的存储下标
if i <= mid: # 在左子树中更新节点值
self.__update_point(i, val, left_index, left, mid)
else: # 在右子树中更新节点值
self.__update_point(i, val, right_index, mid + 1, right)
self.__pushup(index) # 向上更新节点的区间值线段树的区间查询:查询一个区间为
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 的区间值。
我们可以采用递归的方式进行区间查询,具体步骤如下:
- 如果区间
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 完全覆盖了当前节点所在区间$[left, right]$ ,即$left \ge q\underline{\hspace{0.5em}}left$ 并且$right \le q\underline{\hspace{0.5em}}right$ ,则返回该节点的区间值。 - 如果区间
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 与当前节点所在区间$[left, right]$ 毫无关系,即$right < q\underline{\hspace{0.5em}}left$ 或者$left > q\underline{\hspace{0.5em}}right$ ,则返回$0$ 。 - 如果区间
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 与当前节点所在区间有交集,则:- 如果区间
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 与左子节点所在区间$[left, mid]$ 有交集,即$q\underline{\hspace{0.5em}}left \le mid$ ,则在当前节点的左子树中进行查询并保存查询结果$res_\underline{\hspace{0.5em}}left$ 。 - 如果区间
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 与右子节点所在区间$[mid + 1, right]$ 有交集,即$q\underline{\hspace{0.5em}}right > mid$ ,则在当前节点的右子树中进行查询并保存查询结果$res_\underline{\hspace{0.5em}}right$ 。 - 最后返回左右子树元素区间值的聚合计算结果。
- 如果区间
线段树的区间查询代码如下:
# 区间查询,查询区间为 [q_left, q_right] 的区间值
def query_interval(self, q_left, q_right):
return self.__query_interval(q_left, q_right, 0, 0, self.size - 1)
# 区间查询,在线段树的 [left, right] 区间范围中搜索区间为 [q_left, q_right] 的区间值
def __query_interval(self, q_left, q_right, index, left, right):
if left >= q_left and right <= q_right: # 节点所在区间被 [q_left, q_right] 所覆盖
return self.tree[index].val # 直接返回节点值
if right < q_left or left > q_right: # 节点所在区间与 [q_left, q_right] 无关
return 0
self.__pushdown(index)
mid = left + (right - left) // 2 # 左右节点划分点
left_index = index * 2 + 1 # 左子节点的存储下标
right_index = index * 2 + 2 # 右子节点的存储下标
res_left = 0 # 左子树查询结果
res_right = 0 # 右子树查询结果
if q_left <= mid: # 在左子树中查询
res_left = self.__query_interval(q_left, q_right, left_index, left, mid)
if q_right > mid: # 在右子树中查询
res_right = self.__query_interval(q_left, q_right, right_index, mid + 1, right)
return self.function(res_left, res_right) # 返回左右子树元素值的聚合计算结果线段树的区间更新:对
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 区间进行更新,例如将$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 区间内所有元素都更新为$val$ 。
线段树在进行单点更新、区间查询时,区间
而在「区间更新」操作中,如果某个节点区间
设想这一种情况:如果我们在一次执行更新操作时,发现当前节点区间
如果我们减少更新的次数和时间复杂度,应该怎么办?
我们可以向线段树的节点类中增加一个 「延迟标记」,标识为 「该区间曾经被修改为
使用「延迟标记」的区间更新步骤为:
- 如果区间
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 完全覆盖了当前节点所在区间$[left, right]$ ,即$left \ge q\underline{\hspace{0.5em}}left$ 并且$right \le q\underline{\hspace{0.5em}}right$ ,则更新当前节点所在区间的值,并将当前节点的延迟标记为区间值。 - 如果区间
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 与当前节点所在区间$[left, right]$ 毫无关系,即$right < q\underline{\hspace{0.5em}}left$ 或者$left > q\underline{\hspace{0.5em}}right$ ,则直接返回。 - 如果区间
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 与当前节点所在区间有交集,则:- 如果当前节点使用了「延迟标记」,即延迟标记不为
$None$ ,则将当前区间的更新操作应用到该节点的子节点上(即向下更新)。 - 如果区间
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 与左子节点所在区间$[left, mid]$ 有交集,即$q\underline{\hspace{0.5em}}left \le mid$ ,则在当前节点的左子树中更新区间值。 - 如果区间
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 与右子节点所在区间$[mid + 1, right]$ 有交集,即$q\underline{\hspace{0.5em}}right > mid$ ,则在当前节点的右子树中更新区间值。 - 左右子树更新返回之后,向上更新节点的区间值(区间和、区间最大值、区间最小值),区间值等于该节点左右子节点元素值的对应计算结果。
- 如果当前节点使用了「延迟标记」,即延迟标记不为
上面提到了如果当前节点使用了「延迟标记」,即延迟标记不为
- 更新左子节点值和左子节点懒惰标记为
$val$ 。 - 更新右子节点值和右子节点懒惰标记为
$val$ 。 - 将当前节点的懒惰标记更新为
$None$ 。
使用「延迟标记」的区间更新实现代码如下:
# 区间更新,将区间为 [q_left, q_right] 上的元素值修改为 val
def update_interval(self, q_left, q_right, val):
self.__update_interval(q_left, q_right, val, 0, 0, self.size - 1)
# 区间更新
def __update_interval(self, q_left, q_right, val, index, left, right):
if left >= q_left and right <= q_right: # 节点所在区间被 [q_left, q_right] 所覆盖
interval_size = (right - left + 1) # 当前节点所在区间大小
self.tree[index].val = interval_size * val # 当前节点所在区间每个元素值改为 val
self.tree[index].lazy_tag = val # 将当前节点的延迟标记为区间值
return
if right < q_left or left > q_right: # 节点所在区间与 [q_left, q_right] 无关
return 0
self.__pushdown(index)
mid = left + (right - left) // 2 # 左右节点划分点
left_index = index * 2 + 1 # 左子节点的存储下标
right_index = index * 2 + 2 # 右子节点的存储下标
if q_left <= mid: # 在左子树中更新区间值
self.__update_interval(q_left, q_right, val, left_index, left, mid)
if q_right > mid: # 在右子树中更新区间值
self.__update_interval(q_left, q_right, val, right_index, mid + 1, right)
self.__pushup(index)
# 向下更新下标为 index 的节点所在区间的左右子节点的值和懒惰标记
def __pushdown(self, index):
lazy_tag = self.tree[index].lazy_tag
if not lazy_tag:
return
left_index = index * 2 + 1 # 左子节点的存储下标
right_index = index * 2 + 2 # 右子节点的存储下标
self.tree[left_index].lazy_tag = lazy_tag # 更新左子节点懒惰标记
left_size = (self.tree[left_index].right - self.tree[left_index].left + 1)
self.tree[left_index].val = lazy_tag * left_size # 更新左子节点值
self.tree[right_index].lazy_tag = lazy_tag # 更新右子节点懒惰标记
right_size = (self.tree[right_index].right - self.tree[right_index].left + 1)
self.tree[right_index].val = lazy_tag * right_size # 更新右子节点值
self.tree[index].lazy_tag = None # 更新当前节点的懒惰标记注意:有些题目中不是将
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 区间更新为$val$ ,而是将$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 区间中每一个元素值在原值基础增加或减去$val$ 。对于这种情况,我们可以更改一下「延迟标记」的定义。改变为: 「该区间曾经变化了
$val$ ,但其子节点区间值尚未更新」。并更改对应的代码逻辑。
使用「延迟标记」的区间增减更新实现代码如下:
# 区间更新,将区间为 [q_left, q_right] 上的元素值修改为 val
def update_interval(self, q_left, q_right, val):
self.__update_interval(q_left, q_right, val, 0, 0, self.size - 1)
# 区间更新
def __update_interval(self, q_left, q_right, val, index, left, right):
if left >= q_left and right <= q_right: # 节点所在区间被 [q_left, q_right] 所覆盖
# interval_size = (right - left + 1) # 当前节点所在区间大小
# self.tree[index].val = interval_size * val # 当前节点所在区间每个元素值改为 val
# self.tree[index].lazy_tag = val # 将当前节点的延迟标记为区间值
if self.tree[index].lazy_tag:
self.tree[index].lazy_tag += val # 将当前节点的延迟标记增加 val
else:
self.tree[index].lazy_tag = val # 将当前节点的延迟标记增加 val
interval_size = (right - left + 1) # 当前节点所在区间大小
self.tree[index].val += val * interval_size # 当前节点所在区间每个元素值增加 val
return
if right < q_left or left > q_right: # 节点所在区间与 [q_left, q_right] 无关
return 0
self.__pushdown(index)
mid = left + (right - left) // 2 # 左右节点划分点
left_index = index * 2 + 1 # 左子节点的存储下标
right_index = index * 2 + 2 # 右子节点的存储下标
if q_left <= mid: # 在左子树中更新区间值
self.__update_interval(q_left, q_right, val, left_index, left, mid)
if q_right > mid: # 在右子树中更新区间值
self.__update_interval(q_left, q_right, val, right_index, mid + 1, right)
self.__pushup(index)
# 向下更新下标为 index 的节点所在区间的左右子节点的值和懒惰标记
def __pushdown(self, index):
lazy_tag = self.tree[index].lazy_tag
if not lazy_tag:
return
left_index = index * 2 + 1 # 左子节点的存储下标
right_index = index * 2 + 2 # 右子节点的存储下标
if self.tree[left_index].lazy_tag:
self.tree[left_index].lazy_tag += lazy_tag # 更新左子节点懒惰标记
else:
self.tree[left_index].lazy_tag = lazy_tag
left_size = (self.tree[left_index].right - self.tree[left_index].left + 1)
self.tree[left_index].val += lazy_tag * left_size # 左子节点每个元素值增加 lazy_tag
if self.tree[right_index].lazy_tag:
self.tree[right_index].lazy_tag += lazy_tag # 更新右子节点懒惰标记
else:
self.tree[right_index].lazy_tag = lazy_tag
right_size = (self.tree[right_index].right - self.tree[right_index].left + 1)
self.tree[right_index].val += lazy_tag * right_size # 右子节点每个元素值增加 lazy_tag
self.tree[index].lazy_tag = None # 更新当前节点的懒惰标记RMQ 问题:Range Maximum / Minimum Query 的缩写,指的是对于长度为
$n$ 的数组序列$nums$ ,回答若干个询问问题RMQ(nums, q_left, q_right),要求返回数组序列$nums$ 在区间$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 中的最大(最小)值。也就是求区间最大(最小)值问题。
假设查询次数为
单点更新,区间查询问题:
- 修改某一个元素的值。
- 查询区间为
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 的区间值。
这类问题直接使用「3.1 线段树的单点更新」和「3.2 线段树的区间查询」即可解决。
区间更新,区间查询问题:
- 修改某一个区间的值。
- 查询区间为
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 的区间值。
这类问题直接使用「3.3 线段树的区间更新」和「3.2 线段树的区间查询」即可解决。
区间合并,区间查询问题:
- 修改某一个区间的值。
- 查询区间为
$[q\underline{\hspace{0.5em}}left, q\underline{\hspace{0.5em}}right]$ 中满足条件的连续最长区间值。
这类问题需要在「3.3 线段树的区间更新」和「3.2 线段树的区间查询」的基础上增加变动,在进行向上更新时需要对左右子节点的区间进行合并。
扫描线问题:虚拟扫描线或扫描面来解决欧几里德空间中的各种问题,一般被用来解决图形面积,周长等问题。
主要思想为:想象一条线(通常是一条垂直线)在平面上扫过或移动,在某些点停止。几何操作仅限于几何对象,无论何时停止,它们都与扫描线相交或紧邻扫描线,并且一旦线穿过所有对象,就可以获得完整的解。
这类问题通常坐标跨度很大,需要先对每条扫描线的坐标进行离散化处理,将
在有些情况下,线段树需要维护的区间很大(例如
如果使用之前数组形式实现线段树,则需要
这时候我们就可以使用动态开点的思想来构建线段树。
动态开点线段树的算法思想如下:
- 开始时只建立一个根节点,代表整个区间。
- 当需要访问线段树的某棵子树(某个子区间)时,再建立代表这个子区间的节点。
动态开点线段树实现代码如下:
# 线段树的节点类
class TreeNode:
def __init__(self, left=-1, right=-1, val=0):
self.left = left # 区间左边界
self.right = right # 区间右边界
self.mid = left + (right - left) // 2
self.leftNode = None # 区间左节点
self.rightNode = None # 区间右节点
self.val = val # 节点值(区间值)
self.lazy_tag = None # 区间问题的延迟更新标记
# 线段树类
class SegmentTree:
def __init__(self, function):
self.tree = TreeNode(0, int(1e9))
self.function = function # function 是一个函数,左右区间的聚合方法
# 向上更新 node 节点区间值,节点的区间值等于该节点左右子节点元素值的聚合计算结果
def __pushup(self, node):
leftNode = node.leftNode
rightNode = node.rightNode
if leftNode and rightNode:
node.val = self.function(leftNode.val, rightNode.val)
# 单点更新,将 nums[i] 更改为 val
def update_point(self, i, val):
self.__update_point(i, val, self.tree)
# 单点更新,将 nums[i] 更改为 val。node 节点的区间为 [node.left, node.right]
def __update_point(self, i, val, node):
if node.left == node.right:
node.val = val # 叶子节点,节点值修改为 val
return
if i <= node.mid: # 在左子树中更新节点值
if not node.leftNode:
node.leftNode = TreeNode(node.left, node.mid)
self.__update_point(i, val, node.leftNode)
else: # 在右子树中更新节点值
if not node.rightNode:
node.rightNode = TreeNode(node.mid + 1, node.right)
self.__update_point(i, val, node.rightNode)
self.__pushup(node) # 向上更新节点的区间值
# 区间查询,查询区间为 [q_left, q_right] 的区间值
def query_interval(self, q_left, q_right):
return self.__query_interval(q_left, q_right, self.tree)
# 区间查询,在线段树的 [left, right] 区间范围中搜索区间为 [q_left, q_right] 的区间值
def __query_interval(self, q_left, q_right, node):
if node.left >= q_left and node.right <= q_right: # 节点所在区间被 [q_left, q_right] 所覆盖
return node.val # 直接返回节点值
if node.right < q_left or node.left > q_right: # 节点所在区间与 [q_left, q_right] 无关
return 0
self.__pushdown(node) # 向下更新节点所在区间的左右子节点的值和懒惰标记
res_left = 0 # 左子树查询结果
res_right = 0 # 右子树查询结果
if q_left <= node.mid: # 在左子树中查询
if not node.leftNode:
node.leftNode = TreeNode(node.left, node.mid)
res_left = self.__query_interval(q_left, q_right, node.leftNode)
if q_right > node.mid: # 在右子树中查询
if not node.rightNode:
node.rightNode = TreeNode(node.mid + 1, node.right)
res_right = self.__query_interval(q_left, q_right, node.rightNode)
return self.function(res_left, res_right) # 返回左右子树元素值的聚合计算结果
# 区间更新,将区间为 [q_left, q_right] 上的元素值修改为 val
def update_interval(self, q_left, q_right, val):
self.__update_interval(q_left, q_right, val, self.tree)
# 区间更新
def __update_interval(self, q_left, q_right, val, node):
if node.left >= q_left and node.right <= q_right: # 节点所在区间被 [q_left, q_right] 所覆盖
if node.lazy_tag:
node.lazy_tag += val # 将当前节点的延迟标记增加 val
else:
node.lazy_tag = val # 将当前节点的延迟标记增加 val
interval_size = (node.right - node.left + 1) # 当前节点所在区间大小
node.val += val * interval_size # 当前节点所在区间每个元素值增加 val
return
if node.right < q_left or node.left > q_right: # 节点所在区间与 [q_left, q_right] 无关
return 0
self.__pushdown(node) # 向下更新节点所在区间的左右子节点的值和懒惰标记
if q_left <= node.mid: # 在左子树中更新区间值
if not node.leftNode:
node.leftNode = TreeNode(node.left, node.mid)
self.__update_interval(q_left, q_right, val, node.leftNode)
if q_right > node.mid: # 在右子树中更新区间值
if not node.rightNode:
node.rightNode = TreeNode(node.mid + 1, node.right)
self.__update_interval(q_left, q_right, val, node.rightNode)
self.__pushup(node)
# 向下更新 node 节点所在区间的左右子节点的值和懒惰标记
def __pushdown(self, node):
lazy_tag = node.lazy_tag
if not node.lazy_tag:
return
if not node.leftNode:
node.leftNode = TreeNode(node.left, node.mid)
if not node.rightNode:
node.rightNode = TreeNode(node.mid + 1, node.right)
if node.leftNode.lazy_tag:
node.leftNode.lazy_tag += lazy_tag # 更新左子节点懒惰标记
else:
node.leftNode.lazy_tag = lazy_tag # 更新左子节点懒惰标记
left_size = (node.leftNode.right - node.leftNode.left + 1)
node.leftNode.val += lazy_tag * left_size # 左子节点每个元素值增加 lazy_tag
if node.rightNode.lazy_tag:
node.rightNode.lazy_tag += lazy_tag # 更新右子节点懒惰标记
else:
node.rightNode.lazy_tag = lazy_tag # 更新右子节点懒惰标记
right_size = (node.rightNode.right - node.rightNode.left + 1)
node.rightNode.val += lazy_tag * right_size # 右子节点每个元素值增加 lazy_tag
node.lazy_tag = None # 更新当前节点的懒惰标记- 【书籍】ACM-ICPC 程序设计系列 - 算法设计与实现 - 陈宇 吴昊 主编
- 【书籍】算法训练营 陈小玉 著
- 【博文】史上最详细的线段树教程 - 知乎
- 【博文】线段树 Segment Tree 实战 - halfrost
- 【博文】线段树 - OI Wiki
- 【博文】线段树的 python 实现 - 年糕的博客 - CSDN博客
- 【博文】线段树 从入门到进阶 - Dijkstra·Liu - 博客园