First, we calculate the acceleration of the tether at the ground station. It can be calculated as
where
The torque exerted by the drum depends on the tether force
The friction is modelled as the combination of a viscous friction component with the friction coefficient
If the winch uses a generator with Direct Torque Control (DTC) it is possible to calculate
We assume an ideal kite that pulls with the force:
with
Furthermore we assume the following wind speed:

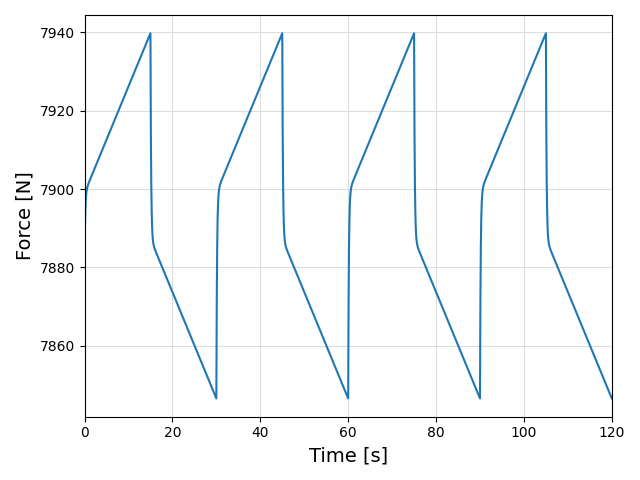
This results in the following tether force:
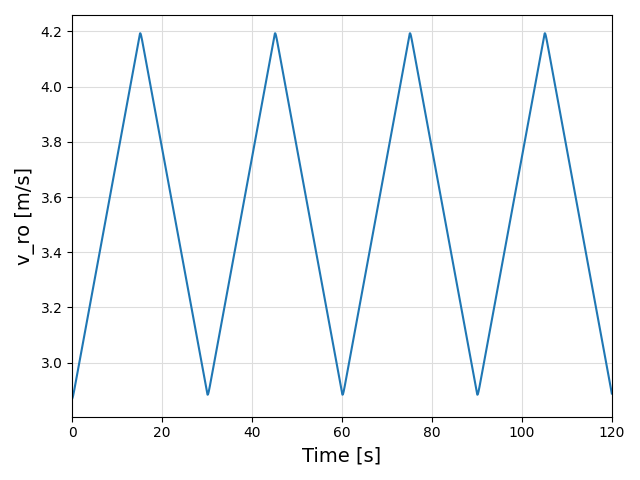
and the following reel-out speed:
To execute the test script, run:
include("examples/torque_control.jl")The settings of the winch model are defined in settings.yaml as follows:
winch:
winch_model: "AsyncMachine" # or TorqueControlledMachine
max_force: 4000 # maximal (nominal) tether force; short overload allowed [N]
v_ro_max: 8.0 # maximal reel-out speed [m/s]
v_ro_min: -8.0 # minimal reel-out speed (=max reel-in speed) [m/s]
drum_radius: 0.1615 # radius of the drum [m]
gear_ratio: 6.2 # gear ratio of the winch [-]
inertia_total: 0.204 # total inertia, as seen from the motor/generator [kgm²]
f_coulomb: 122.0 # coulomb friction [N]
c_vf: 30.6 # coefficient for the viscous friction [Ns/m]