Deep Learning is learning a composition of functions (differentiable or otherwise) as a knowledge representation (through gradient-based optimization methods or otherwise).
- overview
- theory
- bayesian deep learning
- unsupervised learning
- self-supervised learning
- generative models
- architectures
- interesting papers
overview by Ian Goodfellow, Yoshua Bengio, Aaron Courville
"What's Deep Learning?" by Francois Chollet
"On GPT-3: Meta-Learning, Scaling, Implications, And Deep Theory" by Gwern Branwen
"Deep Learning And Shallow Data" by Filip Piekniewski
"The Limitations of Deep Learning for Vision and How We Might Fix Them" by Alan Yuille and Chenxi Liu
"The Limitations of Deep Learning" by Francois Chollet (talk video)
"The Future of Deep Learning" by Francois Chollet (talk video)
http://scholarpedia.org/article/Deep_Learning
"Brief History of Deep Learning from 1943-2019 (Timeline)"
"A 'Brief' History of Neural Nets and Deep Learning" by Andrey Kurenkov
"On the Origin of Deep Learning" by Wand and Raj paper
Deep Learning Summer School 2019 video
Deep Learning Summer School 2018 video
Deep Learning Summer School 2017 video
Deep Learning Summer School 2016 video
Deep Learning Summer School 2015 video
course from FastAI video 2021
course from DeepMind video 2020
course from DeepMind video 2018
course from CMU video 2020
course from NYU video 2020
course by Geoffrey Hinton video 2012
course by Hugo Larochelle video 2013
course by Andrej Karpathy video 2016
course by Sebastian Raschka video 2021
course by Sergey Nikolenko video in russian 2020
course from MIPT video in russian 2020
course by Yandex, HSE, Skoltech video in russian 2020
course by Simon Kozlov et al. video in russian 2020
course by Daniil Polykovsky and Kuzma Hrabrov in russian (videos 2017)
course by Anton Osokin in russian (videos 2018)
"Deep Learning" by Ian Goodfellow, Yoshua Bengio, Aaron Courville (pdf)
"Neural Networks and Deep Learning" by Michael Nielsen
"Deep Learning with Python" by Francois Chollet
reinforcement learning
bayesian inference and learning
probabilistic programming
knowledge representation and reasoning
natural language processing
recommender systems
information retrieval
- supervised representation learning
- unsupervised representation learning
- large sample complexity
- modeling temporal data with long-term dependencies long-term dependencies
- generative modeling
- marrying representation learning with reasoning
- marrying representation learning with structured prediction
- marrying representation learning and reinforcement learning
- efficient bayesian inference for deep learning
- using learning to speed up the solution of complex inference problems
- understanding the landscape of objective functions in deep learning
- do reasoning and learning representations simultaneously
- metric learning and kernel learning
- dimensionality expansion, sparse modeling
- compositional / hierarchical models
- architecture engineering
"Lessons from Optics, The Other Deep Learning" by Ali Rahimi (theory)
"Are Deep Neural Networks Dramatically Overfitted?" by Lilian Weng (theory)
"The Linearization Principle" by Benjamin Recht (theory)
"A Statistical View of Deep Learning: Retrospective" by Shakir Mohamed (theory)
"The Holy Grail of Deep Learning: Modelling Invariances" by Ferenc Huszar (priors)
"Representation Learning and the Information Bottleneck Approach" by Ferenc Huszar (priors)
"Regularization for Deep Learning: A Taxonomy" by Kukacka et al. (priors)
"Modern Theory of Deep Learning: Why Does It Work so Well" by Dmytrii S. (generalization)
"Everything that Works Works Because it's Bayesian: Why Deep Nets Generalize?" (generalization)
"Bottoming Out" by Benjamin Recht (generalization)
"Back-propagation, An Introduction" by Sanjeev Arora and Tengyu Ma (gradient of loss function)
"Calculus on Computational Graphs: Backpropagation" by Chris Olah (gradient of loss function)
"Calculus and Backpropagation" by Massimiliano Tomassoli (gradient of loss function)
"The Zen of Gradient Descent" by Moritz Hardt (optimization of loss function)
"An Overview of Gradient Descent Optimization Algorithms" by Sebastian Ruder (optimization of loss function)
"Why Momentum Really Works" by Gabriel Goh (optimization of loss function)
"Hessian Free Optimization" by Andrew Gibiansky (optimization of loss function)
"The Natural Gradient" by Nick Foti (optimization of loss function)
"Transfer Learning - Machine Learning's Next Frontier" by Sebastian Ruder (representation learning)
"An Overview of Multi-Task Learning in Deep Neural Networks" by Sebastian Ruder (representation learning)
"Deep Learning and the 'Alchemy' Debate" by Sanjeev Arora video
"The Epistemology of Deep Learning" by Yann LeCun video
"Theories of Deep Learning" course from Stanford (videos)
"Theoretical Deep Learning" course from MIPT (videos) in russian
"Toward Theoretical Understanding of Deep Learning" by Sanjeev Arora video
"From Classical Statistics to Modern Machine Learning" by Mikhail Belkin video
"Interplay between Optimization and Generalization in Deep Neural Networks" by Keerthi Selvaraj video
The big difference between deep learning and classical statistical machine learning is that one goes beyond the smoothness assumption and adds other priors on data generating distribution.
-
smoothness
This is the assumption that f(x+de)≈f(x) for unit d and small e. This assumption allows the learner to generalize from training examples to nearby points in input space. Many machine learning algorithms leverage this idea, but it is insufficient to overcome the curse of dimensionality. -
linearity
Many learning algorithms assume that relationships between some variables are linear. This allows the algorithm to make predictions even very far from the observed data, but can sometimes lead to overly extreme predictions. Most simple machine learning algorithms that do not make the smoothness assumption instead make the linearity assumption. These are in fact different assumptions - linear functions with large weights applied to high-dimensional spaces may not be very smooth. -
multiple explanatory factors
Many representation learning algorithms are motivated by the assumption that the data is generated by multiple underlying explanatory factors, and that most tasks can be solved easily given the state of each of these factors. Learning the structure of p(x) requires learning some of the same features that are useful for modeling p(y|x) because both refer to the same underlying explanatory factors. -
causal factors
The model is constructed in such a way that it treats the factors of variation described by the learned representation h as the causes of the observed data x, and not vice-versa. This is advantageous for semi-supervised learning and makes the learned model more robust when the distribution over the underlying causes changes or when we use the model for a new task. -
depth or hierarchical organization of explanatory factors
High-level, abstract concepts can be defined in terms of simple concepts, forming a hierarchy. From another point of view, the use of a deep architecture expresses our belief that the task should be accomplished via a multi-step program with each step referring back to the output of the processing accomplished via previous steps. -
shared factors across tasks
In the context where we have many tasks, corresponding to different yi variables sharing the same input x or where each task is associated with a subset or a function fi(x) of a global input x, the assumption is that each yi is associated with a different subset from a common pool of relevant factors h. Because these subsets overlap, learning all the P(yi|x) via a shared intermediate representation P(h|x) allows sharing of statistical strength between the tasks. -
manifolds
Probability mass concentrates, and the regions in which it concentrates are locally connected and occupy a tiny volume. In the continuous case, these regions can be approximated by low-dimensional manifolds with a much smaller dimensionality than the original space where the data lives. Many machine learning algorithms behave sensibly only on this manifold. Some machine learning algorithms, especially autoencoders, attempt to explicitly learn the structure of the manifold. -
natural clustering
Many machine learning algorithms assume that each connected manifold in the input space may be assigned to a single class. The data may lie on many disconnected manifolds, but the class remains constant within each one of these. This assumption motivates a variety of learning algorithms, including adversarial training. -
temporal and spatial coherence
Slow feature analysis and related algorithms make the assumption that the most important explanatory factors change slowly over time, or at least that it is easier to predict the true underlying explanatory factors than to predict raw observations such as pixel values. -
sparsity
Most features should presumably not be relevant to describing most inputs - there is no need to use a feature that detects elephant trunkswhen representing an image of a cat. It is therefore reasonable to impose a prior that any feature that can be interpreted as “present” or “absent” should be absent most of the time. -
simplicity of factor dependencies
In good high-level representations, the factors are related to each other through simple dependencies. The simplest possible is marginal independence, P(h) = Πi P(hi), but linear dependencies or those captured by a shallow autoencoder are also reasonable assumptions. This can be seen in many laws of physics, and is assumed when plugging a linear predictor or a factorized prior on top of a learned representation.
(Ian Goodfellow, Youshua Bengio, Aaron Courville)
bayesian inference and learning
variational inference
variational autoencoder
"Graphical Models" chapter of "Deep Learning" book by Goodfellow, Bengio, Courville
"The Case for Bayesian Deep Learning" by Andrew Wilson
"A Sober Look at Bayesian Neural Networks" by Carles Gelada and Jacob Buckman
"A Neural Network is a Monference, Not a Model" by Jacob Andreas
"Deep Learning: Efficiency is the Driver of Uncertainty" by Neil Lawrence
"Deep Learning Is Not Good Enough, We Need Bayesian Deep Learning for Safe AI" by Alex Kendall
"What My Deep Model Doesn't Know..." by Yarin Gal
"Uncertainty In Deep Learning" by Yarin Gal
"A Statistical View of Deep Learning" by Shakir Mohamed:
- "Recursive GLMs"
- "Auto-encoders and Free Energy"
- "Memory and Kernels"
- "Recurrent Nets and Dynamical Systems"
- "Generalisation and Regularisation"
- "What is Deep?"
"Everything that Works Works Because it's Bayesian: Why Deep Nets Generalize?" by Ferenc Huszar
"Bayesian Reasoning and Deep Learning in Agent-based Systems" by Shakir Mohamed video
"Marrying Graphical Models & Deep Learning" by Max Welling video
"Bayesian Neural Networks" by Andrew Wilson video
"Is Bayesian Deep Learning the Most Brilliant Thing Ever" panel discussion video
"Open Problems in Deep Learning: A Bayesian Solution" by Dmitry Vetrov video in russian
"Deep Learning and Bayesian Methods" school from HSE (videos)
"Bayesian Methods in Deep Learning" course from MSU video in russian
"A History of Bayesian Neural Networks" by Zoubin Ghahramani video
"Information Theory, Pattern Recognition and Neural Networks" course by David MacKay video
bayesian deep learning - bayesian concepts applied to deep learning methods
deep bayesian learning - deep learning concepts applied to bayesian methods
deep learning:
- (plus) rich non-linear models for classification and sequence prediction
- (plus) scalable learning using stochastic approximations and conceptually simple
- (plus) easily composable with other gradient-based methods
- (minus) poor at representing uncertainty
- (minus) non-trivial to incorporate prior knowledge and symbolic representations
- (minus) eaisly fooled by adversarial examples
- (minus) finicky to optimise due to non-convexity and architecture peculiarities
- (minus) uninterpretable black-boxes, lacking in transparency, difficult to trust
bayesian reasoning:
- (plus) unified framework for model building, inference, prediction and decision making
- (plus) explicit accounting for uncertainty and variability of outcomes
- (plus) robust to overfitting
- (plus) tools for model selection and composition
- (minus) mainly conjugate and linear models
- (minus) potentially intractable inference leading to expensive computation or long simulation times
bayesian deep learning can be implemented in many ways:
- Laplace approximations (MacKay, 1992)
- variational approximations (Hinton and van Camp, 1993; Graves, 2011)
- Markov Chain Monte Carlo (Neal, 1993)
- Stochastic gradient Langevin dynamics (SGLD, Welling and Teh, 2011)
- Probabilistic back-propagation (Hernandez-Lobato et al., 2015)
- Dropout as Bayesian averaging (Gal and Ghahramani, 2015)
- Deep kernel learning (Wilson et al., 2016)
- Gaussian Process Deep Neural Networks (Bradshaw et al., 2017)
course from UC Berkeley (videos 2020, videos 2019)
overview by Alex Graves video
overview by Alex Graves and Marc Aurelio Ranzato video
overview by Irina Higgins and Mihaela Rosca video
"Goals and Principles of Representation Learning" by Ferenc Huszar video
overview by Alex Graves
"Unsupervised learning, one notion or many?" by Sanjeev Arora and Andrej Risteski
"Representation Learning and the Information Bottleneck Approach" by Ference Huszar
"Is Maximum Likelihood Useful for Representation Learning?" by Ference Huszar
self-supervised learning
generative models
potential benefits of unsupervised learning:
- take advantage of huge quantitities of unlabeled data
- answer new questions not seen during training about any subset of observed variables given any other subset
- regularizer to help disentangle underlying factors of variation and to solve new tasks from very few examples
- easier optimization by divide and conquer
- structured output - variable to be predicted is high-dimensional composite object like an image or a sentence
approaches to unsupervised learning:
- predict one variable given the others (pseudolikelihood)
- predict a subset of variables given the others (generalized pseudolikelihood)
- predict a variable given the previous ones in some order (fully-visible Bayes nets, autoregressive nets, NADE, generative RNNs)
- given a corrupted observation, recover the original clean point (denoising)
- predict whether the input comes from the data generating distribution or some other distribution (as a probabilistic classifier) (Noise-Constrastive Estimation)
- learn an invertible function such that the transformed distribution is as factorial as possible (NICE, and when considering approximately invertible functions, VAE)
- learn a stochastic transformation so that if we were to apply it many times we would converge to something close to the data generating distribution (Generative Stochastic Networks, generative denoising autoencoders, diffusion inversion = nonequilibrium thermodynamics)
- learn to generate samples that cannot be distinguished by a classifier from the training samples (GAN)
- maximize the likelihood of the data under some probabilistic model
overview by Yann LeCun (overview video)
overview by Lilian Weng
overview by Amit Chaudhary
overview by Amit Chaudhary
overview of contrastive learning by Lilian Weng
overview of contrastive learning by Ankesh Anand
"Self-supervised Visual Feature Learning with Deep Neural Networks: A Survey" by Jing and Tian paper
overview by Aravind Srinivas video
overview by Aravind Srinivas video
overview by Alex Graves video
overview by Yann LeCun video
overview by Yann LeCun video
overview by Yann LeCun video
overview by Yann LeCun video
overview by Alexander Dyakonov in russian (post)
"Even if we don't have a specific task or reward, we can still choose which aspects of the data to learn and which to ignore. As long as we're predicting one aspect of the data from another else, we're learning about it. Examples: image colorization, missing words, missing patches, missing frames... Anything we remove can be used as a target."
"Deep Generative Models" chapter of "Deep Learning" book by Goodfellow, Bengio, Courville
"Deep Generative Modelling: A Comparative Review of VAEs, GANs, Normalizing Flows, Energy-Based and Autoregressive Models" by Bond-Taylor et al. paper
"Do we still need models or just more data and compute?" by Max Welling
course from UC Berkeley (videos 2020, videos 2019)
overview by Aravind Srinivas video 2020 (strengths and weaknesses of models)
overview by Aravind Srinivas video 2019 (strengths and weaknesses of models)
overview by Danilo Rezende video 2019
overview by Shakir Mohamed video 2016
"Generative Models, Thermodynamics and Symmetries" by Danilo Rezende video 2020
course from MIPT video in russian 2020
course from MIPT video in russian 2019
"A generative model should be able to draw samples from p(x); however estimating p(x) may be computationally intractable. Instead, we often learn a function that maps a vector to an image sample x. The vector may be either be a noise vector, z, drawn from a prior distribution, a label vector, y, or a combination of the two. Probabilistically, these may be interpreted as conditional probabilities: p(x|z), p(x|y) or p(x|z,y). By sampling these conditional probabilities appropriately, novel samples of x may be generated."
"Generative models provide a solution to the problem of unsupervised learning, in which a machine learning system is required to discover the structure hidden within unlabelled data streams. Because they are generative, such models can form a rich imagery of the world in which they are used: an imagination that can harnessed to explore variations in data, to reason about the structure and behaviour of the world, and ultimately, for decision-making and acting."
why generative models?
-
data efficiency and semi-supervised learning
Generative models can reduce the amount of data required. As a simple example, building an image classifier p(class|image) requires estimating a very high-dimenisonal function, possibly requiring a lot of data, or clever assumptions. In contrast, we could model the data as being generated from some low-dimensional or sparse latent variables z, as in p(image) = ∫p(image|z)p(z)dzp(image) = ∫p(image|z)p(z)dz. Then, to do classification, we only need to learn p(class|z), which will usually be a much simpler function. This approach also lets us take advantage of unlabeled data - also known as semi-supervised learning. -
model checking by sampling
Understanding complex regression and classification models is hard - it's often not clear what these models have learned from the data and what they missed. There is a simple way to sanity-check and inspect generative models - simply sample from them, and compare the sampled data to the real data to see if anything is missing. -
understanding
Generative models usually assume that each datapoint is generated from a (usually low-dimensional) latent variable. These latent variables are often interpretable, and sometimes can tell us about the hidden causes of a phenomenon. These latent variables can also sometimes let us do interesting things such as interpolating between examples.
applications of generative models:
- conditional generative models
- machine translation (french -> english)
- speech synthesis (text -> speech)
- image processing (image -> segmentation)
- reinforcement learning
- model-based reinforcement learning (environment simulator)
- semi-supervised learning
- unlabeled data (features for supervised tasks)
generative models:
-
implicit density (implicit models)
generative adversarial networks
A way to train generative models by optimizing them to fool a classifier, the discriminator network, that tries to distinguish between real data and data generated by the generator network. -
approximate explicit density (explicit models)
variational autoencoder
Latent variable models that use a neural network to do approximate inference. The recognition network looks at each datapoint x and outputs an approximate posterior on the latents q(z|x) for that datapoint.restricted boltzmann machine
Latent variable model with hidden units conditionally independent given the visible states, so we can quickly get an unbiased sample from the posterior distribution when given a data vector. -
tractable explicit density (explicit models)
autoregressive models (a subclass of flow models)
A way to model p(x) is to break the model into a series of conditional distributions: p(x)=p(x1)p(x2|x1)p(x3|x2,x1)…p(x)=p(x1)p(x2|x1)p(x3|x2,x1)… This is the approach used, for example, by recurrent neural networks. These models are also realitvely easy to train, but the downside is that they don't support all of the same queries we can make of latent variable models.flow models
A way to specify complex generative models by transforming a simple latent distribution with a series of invertible functions. These approaches are restricted to a more limited set of possible operations, but sidestep the difficult integrals required to train standard latent variable models.
- generative adversarial networks
- variational autoencoder
- restricted boltzmann machine
- autoregressive models
- flow models
"Deep Generative Models" chapter (section 20.10.4) of "Deep Learning" book by Goodfellow, Bengio, Courville
"The GAN Landscape: Losses, Architectures, Regularization, and Normalization" by Kurach et al. paper
overview by Aravind Srinivas video 2020
overview by Aravind Srinivas video 2019
overview ([1], [2]) by Pieter Abbeel and Aravind Srinivas video 2020
overview ([1], [2]) by Aravind Srinivas and Xi Chen video 2019
overview by Jeff Donahue and Mihaela Rosca video 2020
overview by Sergey Nikolenko video in russian 2020
course by Sergey Nikolenko video in russian 2019
overview by Denis Korzhenkov video
overview by Egor Zakharov video
overview by Iliya Tolstikhin video
overview by Dmitry Ulyanov video in russian
"Open Questions about Generative Adversarial Networks" by Augustus Odena (talk by Rauf Kurbanov video in russian)
"Some Open Questions" by Sanjeev Arora
"Generalization and Equilibrium in Generative Adversarial Networks" by Sanjeev Arora (talk video)
"Do GANs Actually Do Distribution Learning?" by Sanjeev Arora
"How to Train Your Generative Models? And Why Does Adversarial Training Work So Well?" by Ferenc Huszar
"An Alternative Update Rule for Generative Adversarial Networks" by Ferenc Huszar
"Adversarial Preference Loss" by Ferenc Huszar
"New Perspectives on Adversarial Training" by Ferenc Huszar
"What Are GANs Useful For?" by Omlos et al. paper
implicit (GANs) vs explicit density models:
- mode collapse in implicit models vs blurry/improbable samples in explicit models - sample quality at the cost of missing modes vs compression at the cost of sample quality
- implicit models work well with few couple hours of training
- explicit models are huge
- implicit models allow interpolations and conditional generation
Compared to the PixelRNN, the runtime to generate a sample is smaller. GANs produce a sample in one shot, while PixelRNNs need to produce a sample one pixel at a time.
Compared to the VAE, there is no variational lower bound. If the discriminator net fits perfectly, then the generator net recovers the training distribution perfectly. In other words, GANs are asymptotically consistent, while VAE has some bias.
Compared to deep Boltzmann machines, there is neither a variational lower bound, nor an intractable partition function. The samples are generated in one shot, instead of generated by repeatedly applying a Markov chain operator.
Compared to GSNs, the samples are generated in one shot, instead of generated by repeatedly applying a Markov chain operator.
Compared to NICE and Real NVE, there’s no restriction on the size of the latent code.
disadvantages:
- plenty of varying engineering tricks and details
- hard to know which piece is significantly helping to push the cutting edge results
- sample diversity and mode dropping behavior in unconditional generation
- evaluation metrics to account for generalization
future:
- Lipschitzness constraints
- conditioning tricks (noise at different levels, batch/instance normalization)
- architecture design (upsampling/downsampling, deep vs wide tradeoff)
- objective functions (Hinge loss, ...)
- stability and scalability (deeper models with fewer parameters + larger batch sizes)
- perturbations at different levels + coarse/fine interpolations
"While most deep generative models are trained by maximizing log likelihood or a lower bound on log likelihood, GANs take a radically different approach that does not require inference or explicit calculation of the data likelihood. Instead, two models are used to solve a minimax game: a generator which samples data, and a discriminator which classifies the data as real or generated. In theory these models are capable of modeling an arbitrarily complex probability distribution. When using the optimal discriminator for a given class of generators, the original GAN proposed by Goodfellow et al. minimizes the Jensen-Shannon divergence between the data distribution and the generator, and extensions generalize this to a wider class of divergences. The ability to train extremely flexible generating functions, without explicitly computing likelihoods or performing inference, and while targeting more mode-seeking divergences has made GANs extremely successful in image generation. In practice, however, GANs suffer from many issues, particularly during training. One common failure mode involves the generator collapsing to produce only a single sample or a small family of very similar samples. Another involves the generator and discriminator oscillating during training, rather than converging to a fixed point. In addition, if one agent becomes much more powerful than the other, the learning signal to the other agent becomes useless, and the system does not learn. The set of hyperparameters for which training is successful is generally very small in practice. Once converged, the generative models produced by the GAN training procedure normally do not cover the whole distribution, even when targeting a mode-covering divergence such as KL. Additionally, because it is intractable to compute the GAN training loss, and because approximate measures of performance such as Parzen window estimates suffer from major flaws, evaluation of GAN performance is challenging. Currently, human judgement of sample quality is one of the leading metrics for evaluating GANs. In practice this metric does not take into account mode dropping if the number of modes is greater than the number of samples one is visualizing. In fact, the mode dropping problem generally helps visual sample quality as the model can choose to focus on only the most common modes. These common modes correspond, by definition, to more typical samples. Additionally, the generative model is able to allocate more expressive power to the modes it does cover than it would if it attempted to cover all modes."
"Deep Generative Models" chapter (section 20.10.3) of "Deep Learning" book by Goodfellow, Bengio, Courville
"An Introduction to Variational Autoencoders" by Diederik Kingma and Max Welling paper
overview by Aravind Srinivas video 2020
overview by Aravind Srinivas video 2019
overview by Pieter Abbeel video 2020
overview (1, 2, 3) by Peter Chen and Jonathan Ho video 2019
overview by Dmitry Vetrov video
overview by Dmitry Vetrov video
overview by Dmitry Vetrov video in russian
overview by Dmitry Vetrov video in russian
overview by Dmitry Vetrov video in russian
VAE diagram by Diederik Kingma
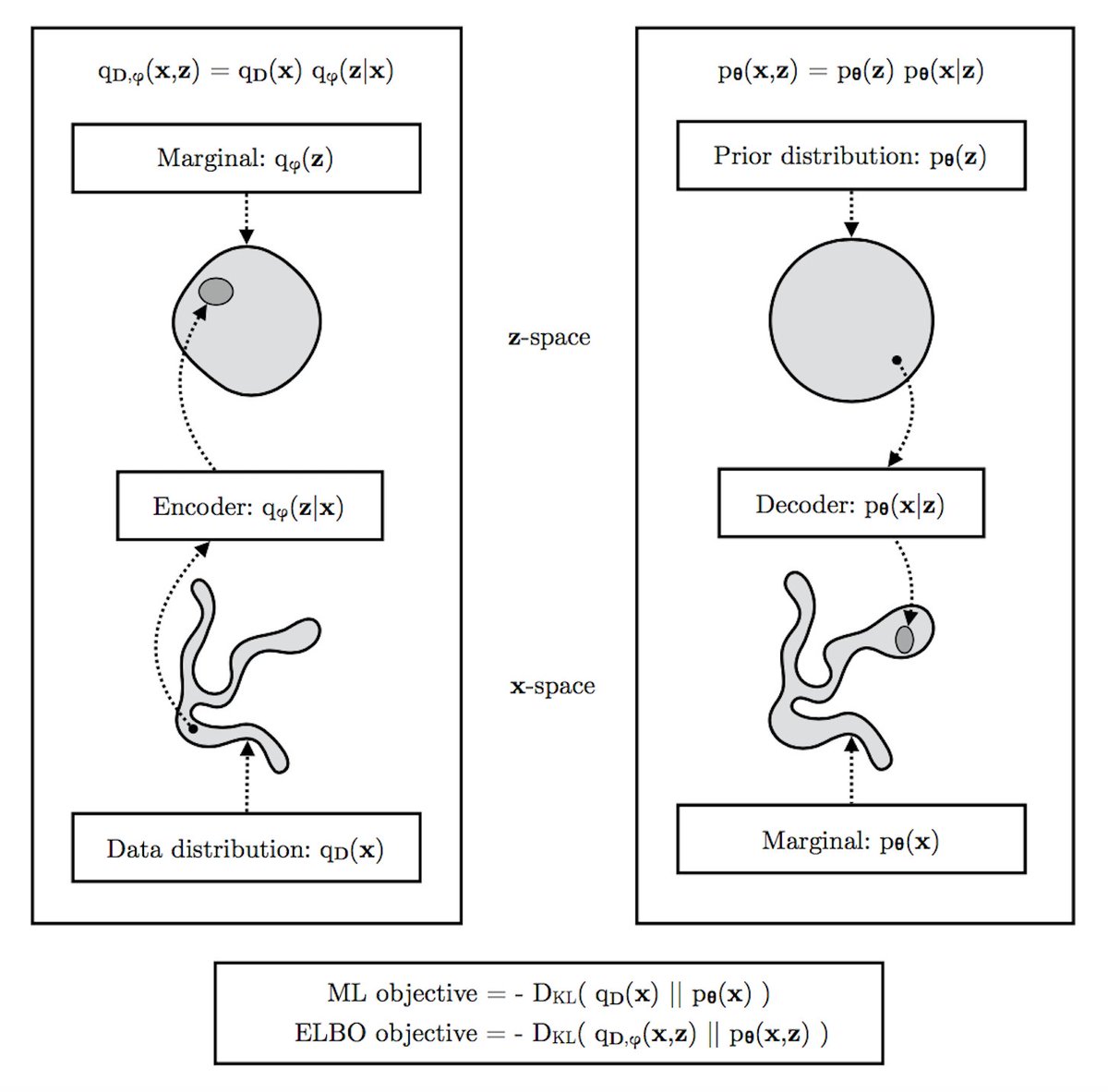{kind=link}
"Variational auto-encoders do not train complex generative models" by Dustin Tran
"VAE = EM" by David McAllester
examples: VAE, IWAE, VQ-VAE, VLAE, PixelVAE
advantages:
- generative model + density model + latent variables + dimensionality reduction
- compressed representation learning
- approximate log-likelihood estimate
- interpolations, analysis of learning
- disentangled representation learning
disadvantages:
- not the best way to learn representations, to get samples and densities
- blurry samples
- success on large scale is ongoing
- factorized gaussian posterior or decoder assumptions maybe too limiting
- disentaglement with KL term still only shown on relatively toy domains
future:
- modern decoder choices (cross-entropy based, weakly autoregressive)
- powerful posterior choices
- hierarchical latent variable models to learn coarse and fine features and interpolations
- discrete latent variable models to prevent posterior collapse and use PixelCNN decoders
"Structured Probabilistic Models for Deep Learning" chapter (section 16.7.1) of "Deep Learning" book by Goodfellow, Bengio, Courville
"The Miracle of the Boltzmann Machine" by Ilya Sutskever
"Undirected Models are Better at Sampling" by Ilya Sutskever
"Learning Deep Generative Models" by Ruslan Salakhutdinov paper
"Boltzmann Machines and Energy-based Models" by Osogami paper
overview by Geoffrey Hinton:
- history (9:00)
video - "Hopfield Nets and Boltzmann Machines"
video - "Restricted Boltzmann Machines"
video - "Stacking RBMs to Make Deep Belief Nets"
video - "Deep Neural Nets with Generative Pre-Training"
video
"Undirected Graphical Models" tutorial by Aaron Courville video
"RBM learns internal (not defined by the user) concepts that help to explain (that can generate) the observed data. These concepts are captured by random variables (called hidden units) that have a joint distribution (statistical dependencies) among themselves and with the data, and that allow the learner to capture highly non-linear and complex interactions between the parts (observed random variables) of any observed example (like the pixels in an image). One can also think of these higher-level factors or hidden units as another, more abstract, representation of the data. RBM is parametrized through simple two-way interactions between every pair of random variable involved (the observed ones as well as the hidden ones)."
- can characterize uncertainty
- deal with missing or noisy data
- can simulate from the model
"Deep Generative Models" chapter (sections 20.10.7-20.10.10) of "Deep Learning" book by Goodfellow, Bengio, Courville
overview by Aravind Srinivas video 2020
overview by Aravind Srinivas video 2019
overview by Pieter Abbeel video 2020
overview by Jonathan Ho video 2019
"Sequence-To-Sequence Modeling with Neural Networks" by Oriol Vinyals and Navdeep Jaitly video
"Generative Modelling as Sequence Learning" by Nal Kalchbrenner video
"Autoregressive Generative Models with Deep Learning" by Hugo Larochelle video
"Autoregressive Generative Models" by Hugo Larochelle, Vincent Dumoulin, Aaron Courville slides
- choose an ordering of the dimensions in input x
- define the conditionals in the product rule expression of p(x) = ∏ p(xk|x<k)
examples:
- masked autoencoder distribution estimator (MADE), PixelCNN, Gated PixelCNN, PixelSNAIL
- neural autoregressive distribution estimator (NADE), PixelRNN
advantages:
- p(x) is tractable, so easy to train, easy to sample (though slower)
disadvantages:
- no single layer of learned representation
- currently, sampling time is slow for practical deployment
- not directly usable for downstream tasks
- no interpolations
future:
- advances with model-parallelism to come
- trillion parameter language models trained on all the Internet's text
- trillion parameter models for both text and images/videos trained on Wikipedia and Instagram/Youtube
- fast sampling with better low-level core engineering - new kernels with sparsity and efficiency
- models with weaker autoregressive structure and more independence assumptions trained on large scale
- design choices such as self-attention introducing inductive biases with lots of compute per parameter
RNNs:
- unbounded receptive field
- serial training compute: O(N) matrix-vector ops
- O(N) dependency steps
- size of state does not depend on captured context length: O(1)
Masked CNNs:
- finite (exponential) receptive field O(L) or O(2^L)
- parallel training compute: O(1) matrix-vector ops
- O(N) dependency steps or O(log N) for dilated conv
- size of state depends on captured context length: O(N) or O(log N)
Masked Self-Attention Nets:
- unbounded receptive field
- parallel compute: O(1) matrix-vector ops, but O(N^2) factor
- O(1) dependency steps
- the state is the captured context: O(N)
"Normalizing Flows for Probabilistic Modeling and Inference" by Papamakarios et al. paper
overview by Aravind Srinivas video 2020
overview by Aravind Srinivas video 2019
overview by Pieter Abbeel video 2020
overview (1, 2) by Jonathan Ho video 2019
overview by Eric Jang video
overview by Arsenii Ashukha video
overview of probability flows by Shakir Mohamed video
overview of probability flows by Dmitry Vetrov video in russian
examples: NICE, RealNVP, Autoregressive Flows, Inverse Autoregressive Flows, Glow, Flow++
disadvantages:
- z is as big as x - models end up becoming big
- as of now, no notion of lower dimensional embedding
- careful initializaton
future:
- learning the mask for coupling
- close the gap with autoregressive models
- fewer expressive flows vs several shallow flows
- usage of multiscale loss - bits/dim vs sample quality tradeoffs
- representation learning with flows
- dimension reduction
- conditional flow models
- stochastic computation graph
- convolutional neural network
- graph neural network
- recurrent neural network
- attention
- compute and memory
- distributed representation
"Back-Propagation and Other Differentiation Algorithms" chapter of "Deep Learning" book by Goodfellow, Bengio, Courville
overview by Wojciech Czarnecki video
"Stochastic Computation Graphs" by Artem Sobolev:
"Stochastic Computation Graphs" by Artem Sobolev video (slides)
"Stochastic Computation Graphs" by Artem Sobolev video in russian
"Reparametrization Trick: Revolution in Stochastic Computational Graphs"
by Dmitry Vetrov video in russian (slides in english)
interesting papers - gradient estimation
"Convolutional Neural Network" chapter of "Deep Learning" book by Goodfellow, Bengio, Courville
overview by Sander Dieleman video 2020
overview by Nando de Freitas video 2017
overview by Serena Young video 2017
overview by Andrej Karpathy video 2016
overview by Sergey Nikolenko video in russian 2020
overview by Victor Lempitsky video in russian 2016
overview by Andrej Karpathy
"Conv Nets: A Modular Perspective" by Chris Olah
"Understanding Convolutions" by Chris Olah
"CNN Architectures" by Serena Young video
overview of architectures by Eugenio Culurciello
"A Gentle Introduction to Graph Neural Networks" by Sanchez-Lengeling et al.
"Relational Inductive Biases, Deep Learning, and Graph Networks" by Battaglia et al.
"Graph Representation Learning" by William Hamilton book
"Geometric Deep Learning Blueprint" with Michael Bronstein, Petar Veličković, Taco Cohen, Joan Bruna video
course by Jure Leskovec video
"Graph Neural Networks: Variations and Applications by Alexander Gaunt video
"Convolutional Neural Networks on Graphs" by Xavier Bresson video
"Large-scale Graph Representation Learning" by Jure Leskovec video
http://geometricdeeplearning.com
"Geometric Deep Learning: Going beyond Euclidean Data" by Bronstein et al. paper
"Geometric Deep Learning" by Michael Bronstein video
"Geometric Deep Learning" by Michael Bronstein, Joan Bruna, Arthur Szlam video
"Geometric Deep Learning" by Michael Bronstein video
"Geometric Deep Learning" by Joan Bruna and Michael Bronstein audio
"Recurrent Neural Network" chapter of "Deep Learning" book by Goodfellow, Bengio, Courville
overview by Marta Garnelo video
overview by Andrej Karpathy video
overview by Justin Johnson video
overview by Ian Goodfellow video
overview by Sergey Nikolenko video in russian
"When Recurrent Models Don't Need to be Recurrent" by John Miller
"The Unreasonable Effectiveness of Recurrent Neural Networks" by Andrej Karpathy
"A Critical Review of Recurrent Neural Networks for Sequence Learning" by Lipton et al.
"Learning Over Long Time Lags" by Hojjat Salehinejad
Long Short Term Memory (LSTM)
overview by Andrej Karpathy video
overview by Sebastian Raschka video
"Understanding LSTM Networks" by Chris Olah
"Understanding, Deriving and Extending the LSTM"
"Backpropogating an LSTM: A Numerical Example" by Aidan Gomez
"Why LSTMs Stop Your Gradients From Vanishing: A View from the Backwards Pass" by Noah Weber
"LSTM: A Search Space Odyssey" by Greff et al. paper
"Limitations of RNNs: A Computational Perspective" by Edward Grefenstette video
"Beyond Seq2Seq with Augmented RNNs" by Edward Grefenstette video
"Frontiers in Recurrent Neural Network Research" by Alex Graves video
"New Directions for Recurrent Neural Networks" by Alex Graves video
overview by Oriol Vinyals video
overview by Alex Graves video
overview by Alex Graves video
overview by Alex Smola and Aston Zhang video
overview by Sergey Nikolenko video in russian
overview by Mikhail Figurnov video in russian
overview by Denny Britz
overview by Chris Olah and Shan Carter
Transformer
overview by Ashish Vaswani video
"What is going on in a neural network?" by Christian Szegedy video
"Attention Is All You Need" by Vaswani et al. paper summary
"Hopfield Networks is All You Need" by Ramsauer et al. paper (post, overview by Kilcher video)
Capsule Network
overview by Geoffrey Hinton video
"How to Represent Part-whole Hierarchies in a Neural Network" by Hinton paper summary (GLOM)
"Canonical Capsules: Self-Supervised Capsules in Canonical Pose" by Sun et al. paper (overview video)
"Unsupervised Part Representation by Flow Capsules" by Sabour et al. paper
"Stacked Capsule Autoencoders" by Kosiorek et al. paper summary
"Matrix Capsules with EM Routing" by Hinton et al. paper summary
"Dynamic Routing Between Capsules" by Hinton et al. paper summary
"The ability to focus on one thing and ignore others has a vital role in guiding cognition. Not only does this allow us to pick out salient information from noisy data (the cocktail party problem) it also allows us to pursue one thought at a time, remember one event rather than all events."
"Even with no explicit attention mechanism, neural networks learn a form of implicit attention where they respond more strongly to some parts of the data than others. Implicit attention is great, but there are still reasons to favour an explicit attention mechanism that limits the data presented to the network in some way:
- computational efficiency
- scalability (e.g. fixed size glimpse for any size image)
- don't have to learn to ignore things
- sequential processing of static data (e.g. gaze moving around image)"
types of attention:
- positional
- associative
hard (stochastic variables, learned via reinforcement) vs soft (continuous variables, learned via backpropagation) attention models:
- if you care about variables (want to read off the attention) then make them hard (optimization is quicker with hard decisions, randomization helps with better initializations for attention)
- if you don't care (just part of the process to get end result) then make them soft (inference is computationally easier than with graphical models of stochastic variables, determenistic attention prevents exploration)
soft attention models:
- computationally expensive (they had to examine every image location, hard to scale to large datasets)
- deterministic (can be trained by backprop)
hard attention models:
- computationally more efficient (the need to process only small part of each image frame)
- stochastic (require some form of sampling because they must make discrete choices)
overview by Alex Graves video
overview by Edward Grefenstette video
"Attention and Augmented Recurrent Neural Networks" by Chris Olah and Shan Carter
"Neural Abstract Machines & Program Induction" workshop at NIPS 2016 (videos)
- Pointer Networks
- Memory Networks
- Neural Stacks/Queues
- Neural GPU
- Neural Turing Machine
- Differentiable Neural Computer
"The idea of distributed representations was introduced with reference to cognitive representations: a mental object can be represented efficiently (both in terms of number of bits and in terms of number of examples needed to generalize about it) by characterizing the object using many features, each of which can separately each be active or inactive. For example, with m binary features, one can describe up to 2^m different objects. The idea is that the brain would be learning and using such representations because they help it generalize to new objects that are similar to known ones in many respects. A distributed representation is opposed to a local representation, in which only one neuron (or very few) is active at each time, i.e., as with grandmother cells. One can view n-gram models as a mostly local representation: only the units associated with the specific subsequences of the input sequence are turned on. Hence the number of units needed to capture the possible sequences of interest grows exponentially with sequence length."
(Yoshua Bengio)
"Representation Learning" chapter of "Deep Learning" book by Goodfellow, Bengio, Courville
"Induction, Inductive Biases, and Infusing Knowledge into Learned Representations" by Sam Finlayson
"Visualizing Representations" by Chris Colah
"We are attempting to replace symbols by vectors so we can replace logic by algebra."
(Yann LeCun)
"Aetherial Symbols" by Geoffrey Hinton slides
- words are the symbolic indicators of thought vectors
- words carry with each a probabilistic stream of potential further thoughts and links to past symbols
- much like implicit CFD, they are backward convolved with prior words to determine most likely hidden thought, and then forward solved to determine next word
- further, these streams are described with formal logic relationships based on the identities of the included words which can have levels of "meta-identity" (ie: I can't know some pair are brother and sister without having having been given the idea of bros/sis pairs or seen others)
- knowledge of more or varied relationships (and more logic paths) provides more efficient/accurate ways to solve an optimized path through the higher dimensions of word/symbol space
- in a sense, one may never know the idea of "bros/sis" but it is probabilistically highly likely that given a male and female with the same parents that they are also brothers/sisters
"Deep Meaning Beyond Thought Vectors" by David McAllester
distributed representation of natural language
neural architectures for reasoning
continuous space embeddings of words, sentences, texts, relational graphs
- approximate objects/relations/categories
- built in-similarity function
- generative function for relations/categories (no need to name everything)
- map objects (images, sentences, DNA sequences, commands, or combinations of these) to points in metric spaces (embeddings)
- combinatorial optimization problems becomes easier in metric spaces when casted as continuous optimization problems
- embeddings are efficient/flexible features and provide extra knowledge for many practical tasks
- embeddings can be decoded to produce structured outputs (parsing, sequential decision making, translation)
- distributed representations have exponential power and further gains arise from the use of layers (composition)
- embeddings can be learned with supervised or unsupervised training and can be learned for multiple tasks jointly
- scalable and parallelizable training with stochastic gradient descent using similarity ranking loss or log-likelihood loss
- more data and bigger the models, the more impressive the results
limitations:
- fixed capacity: one has to choose a dimension before training and it determines the capacity of the representation, then one can't increase it as more data comes in without retraining the whole thing from the scratch
- partial lack of interpretability: distributed representations are black boxes - they may preserve some semantic relations as vector algebraic properties, but one can't generally easily extract arbitrary information from them without a specifically trained neural network
open questions:
- should words/sentences/entities/relations/facts be vectors or matrices, or tensors, or distributions over them?
- better compression? improve memory capacity of embeddings and allow for one-shot learning of new symbols
- do we need non-linearities? most supervised problems are mostly tackled well by linear models
- can we fit the meaning of a sentence into a “single *&!**^ing vector”?
- what is the sentence space?
- are the sentence vectors contextual?
- how to compose words into sentences, entities and relations into facts? (addition, tensor product, inner products, ...)
- function words, logical operators, quantification, inference, ...?
- composing in other modalities (images, videos, ...)?
- what type of inferences do embeddings support?
- what is a proof in embeddings?
- how can explicit background knowledge be injected into embeddings?
- theory
- gradient estimation
- bayesian deep learning
- generative adversarial networks
- variational autoencoder
- autoregressive models
- flow models
- unsupervised learning
- self-supervised learning
- architectures
- connections to neuroscience
- applications
"Reconciling Modern Machine Learning Practice and the Bias-variance Trade-off" Belkin, Hsu, Ma, Mandal
generalization
"Breakthroughs in machine learning are rapidly changing science and society, yet our fundamental understanding of this technology has lagged far behind. Indeed, one of the central tenets of the field, the bias-variance trade-off, appears to be at odds with the observed behavior of methods used in the modern machine learning practice. The bias-variance trade-off implies that a model should balance under-fitting and over-fitting: rich enough to express underlying structure in data, simple enough to avoid fitting spurious patterns. However, in the modern practice, very rich models such as neural networks are trained to exactly fit (i.e., interpolate) the data. Classically, such models would be considered over-fit, and yet they often obtain high accuracy on test data. This apparent contradiction has raised questions about the mathematical foundations of machine learning and their relevance to practitioners. In this paper, we reconcile the classical understanding and the modern practice within a unified performance curve. This "double descent" curve subsumes the textbook U-shaped bias-variance trade-off curve by showing how increasing model capacity beyond the point of interpolation results in improved performance. We provide evidence for the existence and ubiquity of double descent for a wide spectrum of models and datasets, and we posit a mechanism for its emergence. This connection between the performance and the structure of machine learning models delineates the limits of classical analyses, and has implications for both the theory and practice of machine learning."
videohttps://youtube.com/watch?v=OBCciGnOJVs (Belkin)videohttps://youtube.com/watch?v=LzL5naUS31s (Belkin)videohttps://youtube.com/watch?v=ZAW9EyNo2fw (Kilcher)videohttps://youtu.be/FBggC-XVF4M?t=1h10m52s (Czarnecki)videohttps://youtu.be/SKYXBPCJHCg?t=42m14s (Vetrov)in russianposthttps://lilianweng.github.io/lil-log/2019/03/14/are-deep-neural-networks-dramatically-overfitted.html#the-lottery-ticket-hypothesispaper"Fit without fear: remarkable mathematical phenomena of deep learning through the prism of interpolation" by Belkin (overviewvideoin russian)paper"Deep Double Descent: Where Bigger Models and More Data Hurt" by Nakkiran et al. (post, overviewvideo, overviewvideoin russian)paper"The Generalization Error of Random Features Regression: Precise Asymptotics and Double Descent Curve" by Mei et al.
"Understanding Deep Learning Requires Rethinking Generalization" Zhang, Bengio, Hardt, Recht, Vinyals
generalization
"Despite their massive size, successful deep artificial neural networks can exhibit a remarkably small difference between training and test performance. Conventional wisdom attributes small generalization error either to properties of the model family, or to the regularization techniques used during training. Through extensive systematic experiments, we show how these traditional approaches fail to explain why large neural networks generalize well in practice. Specifically, our experiments establish that state-of-the-art convolutional networks for image classification trained with stochastic gradient methods easily fit a random labeling of the training data. This phenomenon is qualitatively unaffected by explicit regularization, and occurs even if we replace the true images by completely unstructured random noise. We corroborate these experimental findings with a theoretical construction showing that simple depth two neural networks already have perfect finite sample expressivity as soon as the number of parameters exceeds the number of data points as it usually does in practice. We interpret our experimental findings by comparison with traditional models."
"1. The effective capacity of neural networks is large enough for a brute-force memorization of the entire data set.
2. Even optimization on random labels remains easy. In fact, training time increases only by a small constant factor compared with training on the true labels.
3. Randomizing labels is solely a data transformation, leaving all other properties of the learning problem unchanged."
"It is likely that learning in the traditional sense still occurs in part, but it appears to be deeply intertwined with massive memorization. Classical approaches are therefore poorly suited for reasoning about why these models generalize well.""Deep Learning networks are just massive associative memory stores! Deep Learning networks are capable of good generalization even when fitting random data. This is indeed strange in that many arguments for the validity of Deep Learning is on the conjecture that ‘natural’ data tends to exists in a very narrow manifold in multi-dimensional space. Random data however does not have that sort of tendency."
"Large, unregularized deep nets outperform shallower nets with regularization."
"SOTA models can fit arbitrary label patterns, even on large data-sets like ImageNet."
"Popular models can fit structureless noise."
"In the case of one-pass SGD, where each training point is only visited at most once, the algorithm is essentially optimizing the expected loss directly. Therefore, there is no need to define generalization. However, in practice, unless one has access to infinite training samples, one-pass SGD is rarely used. Instead, it is almost always better to run many passes of SGD over the same training set. In this case, the algorithm is optimizing the empirical loss, and the deviation between the empirical loss and the expected loss (i.e. the generalization error) needs to be controlled. In statistical learning theory, the deviation is typically controlled by restricting the complexity of the hypothesis space. For example, in binary classification, for a hypothesis space with VC-dimension d and n i.i.d. training samples, the generalization error could be upper bounded by O(sqrt(d/n)). In the distribution-free setting, the VC dimension also provide a lower bound for the generalization error. For example, if we are highly over-parameterized, i.e. d >> n, then there is a data distribution under which the generalization error could be arbitrarily bad. This worst case behavior is recently demonstrated by a randomization test on large neural networks that have the full capability of shattering the whole training set. In those experiments, zero-error minimizers for the empirical loss are found by SGD. Since the test performance could be only at the level of chance, the worst possible generalization error is observed. On the other hand, those same networks are found to generalize very well on natural image classification datasets, achieving the state-of-the-art performance on some standard benchmarks. This create a puzzle as our traditional characterization of generalization no longer readily apply in this scenario."
"You might assume that if you can fit each point in a random training set you would have bad generalization performance because because if your model class can do this then all of the standard learning theory bounds for generalization error are quite dire. VC theory gives generalization bounds in terms of the maximum number of points where you can achieve zero training error for every possible labelling (they call this "shattering"). Rademacher complexity gives tighter bounds, but they are in terms of the expected error of the model class over uniform random labellings of your data (the expectation is over the randomness in the random labels). If you model class is powerful enough to fit any arbitrary labelling of your data set then both of these theories give no guarantees at all about generalization error. They can't guarantee you will ever make a single correct prediction, even with infinite test samples. Obviously, experience says otherwise. Neural nets tend to generalize pretty well (often surprisingly well) in spite of the dire predictions of learning theory. That's why this result requires "rethinking generalization"; the stuff we know about generalization doesn't explain any of the success we see in practice."
videohttps://facebook.com/iclr.cc/videos/1710657292296663?t=1105 (Recht)videohttps://facebook.com/iclr.cc/videos/1710657292296663?t=3220 (Zhang)videohttps://youtu.be/mEYerIMYb5Q?t=18m2s (Goncalves)videohttps://youtu.be/DSYzHPW26Ig?t=10m44s (Graves)videohttps://youtu.be/pFWiauHOFpY?t=1m41s (Steenbrugge)posthttps://danieltakeshi.github.io/2017/05/19/understanding-deep-learning-requires-rethinking-generalization-my-thoughts-and-notesnoteshttps://theneuralperspective.com/2017/01/24/understanding-deep-learning-requires-rethinking-generalization/noteshttps://blog.acolyer.org/2017/05/11/understanding-deep-learning-requires-re-thinking-generalization/noteshttps://reddit.com/r/MachineLearning/comments/6ailoh/r_understanding_deep_learning_requires_rethinking/dhis1hz/
"Sharp Minima Can Generalize For Deep Nets" Dinh, Pascanu, Bengio, Bengio
generalization
"Despite their overwhelming capacity to overfit, deep learning architectures tend to generalize relatively well to unseen data, allowing them to be deployed in practice. However, explaining why this is the case is still an open area of research. One standing hypothesis that is gaining popularity, e.g. Hochreiter & Schmidhuber (1997); Keskar et al. (2017), is that the flatness of minima of the loss function found by stochastic gradient based methods results in good generalization. This paper argues that most notions of flatness are problematic for deep models and can not be directly applied to explain generalization. Specifically, when focusing on deep networks with rectifier units, we can exploit the particular geometry of parameter space induced by the inherent symmetries that these architectures exhibit to build equivalent models corresponding to arbitrarily sharper minima. Furthermore, if we allow to reparametrize a function, the geometry of its parameters can change drastically without affecting its generalization properties."
videohttps://vimeo.com/237275513 (Dinh)
"A Closer Look at Memorization in Deep Networks" Arpit et al.
generalization
"We examine the role of memorization in deep learning, drawing connections to capacity, generalization, and adversarial robustness. While deep networks are capable of memorizing noise data, our results suggest that they tend to prioritize learning simple patterns first. In our experiments, we expose qualitative differences in gradient-based optimization of deep neural networks on noise vs. real data. We also demonstrate that for appropriately tuned explicit regularization (e.g., dropout) we can degrade DNN training performance on noise datasets without compromising generalization on real data. Our analysis suggests that the notions of effective capacity which are dataset independent are unlikely to explain the generalization performance of deep networks when trained with gradient based methods because training data itself plays an important role in determining the degree of memorization."
videohttps://vimeo.com/238241921 (Krueger)videohttp://videocrm.ca/Machine18/Machine18-20180423-5-YoshuaBengio.mp4 (42:27) (Bengio)videohttps://youtube.com/watch?v=pFWiauHOFpY (Steenbrugge)
"Deep Learning and the Information Bottleneck Principle" Tishby, Zaslavsky
generalization
"Deep Neural Networks are analyzed via the theoretical framework of the information bottleneck principle. We first show that any DNN can be quantified by the mutual information between the layers and the input and output variables. Using this representation we can calculate the optimal information theoretic limits of the DNN and obtain finite sample generalization bounds. The advantage of getting closer to the theoretical limit is quantifiable both by the generalization bound and by the network’s simplicity. We argue that both the optimal architecture, number of layers and features/connections at each layer, are related to the bifurcation points of the information bottleneck tradeoff, namely, relevant compression of the input layer with respect to the output layer. The hierarchical representations at the layered network naturally correspond to the structural phase transitions along the information curve. We believe that this new insight can lead to new optimality bounds and deep learning algorithms."
"In this work we express this important insight using information theoretic concepts and formulate the goal of deep learning as an information theoretic tradeoff between compression and prediction. We first argue that the goal of any supervised learning is to capture and efficiently represent the relevant information in the input variable about the output - label - variable. Namely, to extract an approximate minimal sufficient statistics of the input with respect to the output. The information theoretic interpretation of minimal sufficient statistics suggests a principled way of doing that: find a maximally compressed mapping of the input variable that preserves as much as possible the information on the output variable. This is precisely the goal of the Information Bottleneck method."
"Several interesting issues arise when applying this principle to DNNs. First, the layered structure of the network generates a successive Markov chain of intermediate representations, which together form the (approximate) sufficient statistics. This is closely related to successive refinement of information in Rate Distortion Theory. Each layer in the network can now be quantified by the amount of information it retains on the input variable, on the (desired) output variable, as well as on the predicted output of the network. The Markovian structure and data processing inequalities enable us to examine the efficiency of the internal representations of the network’s hidden layers, which is not possible with other distortion/error measures. It also provides us with the information theoretic limits of the compression/prediction problem and theoretically quantify each proposed DNN for the given training data. In addition, this representation of DNNs gives a new theoretical sample complexity bound, using the known finite sample bounds on the IB."
"Another outcome of this representation is a possible explanation of the layered architecture of the network. Neurons, as non-linear (e.g. sigmoidal) functions of a dot-product of their input, can only capture linearly separable properties of their input layer. Linear separability is possible when the input layer units are close to conditional independence, given the output classification. This is generally not true for the data distribution and intermediate hidden layer are required. We suggest here that the break down of the linear-separability is associated with a representational phase transition (bifurcation) in the IB optimal curve, as both result from the second order dependencies in the data. Our analysis suggests new information theoretic optimality conditions, sample complexity bounds, and design principle for DNN models."
"We suggest a novel information theoretic analysis of deep neural networks based on the information bottleneck principle. Arguably, DNNs learn to extract efficient representations of the relevant features of the input layer X for predicting the output label Y, given a finite sample of the joint distribution p(X, Y). This representation can be compared with the theoretically optimal relevant compression of the variable X with respect to Y, provided by the information bottleneck (or information distortion) tradeoff. This is done by introducing a new information theoretic view of DNN training as an successive (Markovian) relevant compression of the input variable X, given the empirical training data. The DNN’s prediction is activating the trained compression layered hierarchy to generate a predicted label Yˆ. Maximizing the mutual information I(Y; Yˆ), for a sequence of evoking inputs X, emerges as the natural DNN optimization goal."
"If I(Z;Y) is maximal possible (we do not lose information about labels) and I(Z;X) is minimal possible (we have removed all the unnecessary information from X), then Z is a minimal sufficient statistic for Y. And this means, that we extracted from X all the necessary things we needed for "predicting" Y and discarded all the irrelevant part. And IB Lagrangian gives us a trade-off between sufficiency and minimality, which is kinda good."
- https://en.wikipedia.org/wiki/Information_bottleneck_method
videohttps://youtube.com/watch?v=ei59sYLVuqA (Tishby)videohttps://youtube.com/watch?v=yoMC0P2x3Fg + https://youtube.com/watch?v=7OsyeNbKQjU (Skorokodov)in russianposthttp://inference.vc/representation-learning-and-compression-with-the-information-bottleneck/paper"The Information Bottleneck Method" by Tishby, Pereira, Bialekpaper"Learning and Generalization with the Information Bottleneck" by Shamir, Sabato, Tishby
"Opening the Black Box of Deep Neural Networks via Information" Shwartz-Ziv, Tishby
generalization
"Despite their great success, there is still no comprehensive theoretical understanding of learning with Deep Neural Networks or their inner organization. Previous work [Tishby & Zaslavsky (2015)] proposed to analyze DNNs in the Information Plane; i.e., the plane of the Mutual Information values that each layer preserves on the input and output variables. They suggested that the goal of the network is to optimize the Information Bottleneck tradeoff between compression and prediction, successively, for each layer. In this work we follow up on this idea and demonstrate the effectiveness of the Information-Plane visualization of DNNs. We first show that the stochastic gradient descent epochs have two distinct phases: fast empirical error minimization followed by slow representation compression, for each layer. We then argue that the DNN layers end up very close to the IB theoretical bound, and present a new theoretical argument for the computational benefit of the hidden layers."
"Our numerical experiments were motivated by the Information Bottleneck framework. We demonstrated that the visualization of the layers in the information plane reveals many - so far unknown - details about the inner working of Deep Learning and Deep Neural Networks. They revealed the distinct phases of the SGD optimization, drift and diffusion, which explain the ERM and the representation compression trajectories of the layers. The stochasticity of SGD methods is usually motivated as a way of escaping local minima of the training error. In this paper we give it a new, perhaps much more important role: it generates highly efficient internal representations through compression by diffusion. This is consistent with other recent suggestions on the role of noise in Deep Learning."
"We also argue that SGD seems an overkill during the diffusion phase, which consumes most of the training epochs, and that much simpler optimization algorithms, such as Monte-Carlo relaxations, can be more efficient. But the IB framework may provide even more. If the layers actually converge to the IB theoretical bounds, there is an analytic connection between the encoder and decoder distributions for each layer, which can be exploited during training. Combining the IB iterations with stochastic relaxation methods may significantly boost DNN training. To conclude, it seems fair to say, based on our experiments and analysis, that Deep Learning with DNN are in essence learning algorithms that effectively find efficient representations that are approximate minimal sufficient statistics in the IB sense."
"If our findings hold for general networks and tasks, the compression phase of the SGD and the convergence of the layers to the IB bound can explain the phenomenal success of Deep Learning."
"DNNs with SGD have two phases: error minimization, then representation compression"
" The Information Plane provides a unique visualization of DL:
- Most of the learning time goes to compression
- Layers are learnt bottom up - and "help" each other
- Layers converge to special (critical?) points on the IB bound
The advantage of the layers is mostly computational:
- Relaxation times are super-linear (exponential?) in the Entropy gap
- Hidden layers provide intermediate steps and boost convergence time
- Hidden layers help in avoiding critical slowing down
"
"We gave two independent theoretical arguments on why compression of representation dramatically improves generalization, and how stochastic relaxation, due to either noise of the SGD, OR a noisy training energy surface effectively adds noise also to BGD push the weights distribution to a Gibbs measure in the training error (this is an old argument we use in our statistical mechanics of learning papers 25 years ago, and is used today by many others, e.g. Tommy Poggio). Then we show that this weight Gibbs distribution leads directly (essentially through Bayes rule) to the IB optimal encoder of the layers."
"We also showed some of newer simulations, which include much larger and different problems (MNIST, Cifar-10, different architectures, CNN, etc.), including ReLU non-linearities and linear Networks. In all these networks we see essentially the same picture: the last hidden layer first improves generalization error (which is actually proved to be directly bounded by the mutual information on Y) by fitting the training data and adding more information on the inputs, and then further improve generalization by compressing the representation and “forget” the irrelevant details of the inputs. During both these phases of learning the information on the relevant components of the input increases monotonically. You can of course have compression without generalization, when the training size is too small and one can’t keep the homogeneity of the cover."
"We also showed that there are clearly and directly two phases of the gradients distribution. First, high SNR gradients follow by a sharp flip to low SNR gradients, which correspond to the slow saturation of the training error. This clear gradients phase transition, which we see with all types of non-linearities and architectures, beautifully corresponds to the “knee” between memorization and compression in the information plane. This can easily be explained as done by Poggio in his theory 3 paper, or by more complicated calculations by Riccardo Zecchina and his coworkers using statistical mechanics."
"For representation Z, maximizing mutual information with the output while minimizing mutual information with the input."
"The general result is that networks go through two phases of learning. In retrospect, this is kind of obvious to anyone that's trained neural networks in practice. There is typically a short phase where it makes rapid progress, followed by a much longer phase of "fine tuning". The real contribution of this paper is showing that these stages correspond to a phase change in how the mutual information of the encoder/decoder distributions of each layer change. The first stage is when each layer is learning to do its fair share of information preservation. During this stage, mutual information between each layer's representation and the input/output increases to the point that the network's representation in the information plane is more or less linear. All this means is that information loss/gain from layer to layer is approximately constant, so in a sense no layer is doing more work than others. The second phase consists of continuing to maximizing the mutual information between each layer and the output, but now at the expense of the mutual information between each layer and the input. This is in contrast to the first stage where both quantities were being maximized in. In other words, each layer is now learning to prioritize information that is important for the task at hand."
"Authors describe SGD as having two distinct phases, a drift phase and a diffusion phase. SGD begins in the first phase, basically exploring the multidimensional space of solutions. When it begins converging, it arrives at the diffusion phase where it is extremely chaotic and the convergence rate slows to a crawl. An intuition of what’s happening in this phase is that the network is learning to compress. That is, the behavior makes a phase transition from high mean with low variance to one with a low mean but high variance. This provides further explanation to Smith et. al’s observations, that in the region near convergence, it is highly chaotic. This of course does not fully explain why a high learning rate will knock the system into a place of high loss."
"Consider the gradient of the loss with respect to the weights.
Phase 1 (drift): Mean gradient size is much larger than the standard deviation.
Phase 2 (diffusion): Mean gradient is smaller and noise takes over - Langevin/Boltzmann effect kicks in.
Authors claim that SGD training compresses (reduces I(X;T)) in the diffusion phase."
- https://en.wikipedia.org/wiki/Information_bottleneck_method
videohttps://youtube.com/watch?v=TisObdHW8Wo (Tishby)videohttps://youtube.com/watch?v=XL07WEc2TRI (Tishby)videohttps://youtube.com/watch?v=EQTtBRM0sIs (Tishby)videohttps://youtube.com/watch?v=bLqJHjXihK8 (Tishby)videohttps://youtube.com/watch?v=ekUWO_pI2M8 (Tishby)videohttps://youtu.be/RKvS958AqGY?t=12m7s (Tishby)videohttps://youtu.be/cHjI37DsQCQ?t=41m40s (Selvaraj)videohttps://youtu.be/pFWiauHOFpY?t=8m15s (Steenbrugge)videohttps://youtube.com/watch?v=yoMC0P2x3Fg + https://youtube.com/watch?v=7OsyeNbKQjU (Skorokodov)in russianposthttps://lilianweng.github.io/lil-log/2017/09/28/anatomize-deep-learning-with-information-theory.htmlposthttps://reddit.com/r/MachineLearning/comments/be8qie/discussion_what_is_the_status_of_the_information/el9eqwfposthttps://lilianweng.github.io/lil-log/2017/09/28/anatomize-deep-learning-with-information-theory.htmlposthttps://weberna.github.io/jekyll/update/2017/11/08/Information-Bottleneck-Part1.htmlposthttp://inference.vc/representation-learning-and-compression-with-the-information-bottleneck/posthttps://reddit.com/r/MachineLearning/comments/be8qie/discussion_what_is_the_status_of_the_information/elu8t2f/?context=3noteshttps://blog.acolyer.org/2017/11/15/opening-the-black-box-of-deep-neural-networks-via-information-part-i/noteshttps://blog.acolyer.org/2017/11/16/opening-the-black-box-of-deep-neural-networks-via-information-part-ii/noteshttps://theneuralperspective.com/2017/03/24/opening-the-black-box-of-deep-neural-networks-via-information/presshttps://quantamagazine.org/new-theory-cracks-open-the-black-box-of-deep-learning-20170921paper"Deep Learning and the Information Bottleneck Principle" by Tishby and Zaslavskysummary
generalization information bottleneck
"In this work, we study the information bottleneck theory of deep learning, which makes three specific claims: first, that deep networks undergo two distinct phases consisting of an initial fitting phase and a subsequent compression phase; second, that the compression phase is causally related to the excellent generalization performance of deep networks; and third, that the compression phase occurs due to the diffusion-like behavior of stochastic gradient descent. Here we show that none of these claims hold true in the general case. Through a combination of analytical results and simulation, we demonstrate that the information plane trajectory is predominantly a function of the neural nonlinearity employed: double-sided saturating nonlinearities like tanh yield a compression phase as neural activations enter the saturation regime, but linear activation functions and single-sided saturating nonlinearities like the widely used ReLU in fact do not. Moreover, we find that there is no evident causal connection between compression and generalization: networks that do not compress are still capable of generalization, and vice versa. Next, we show that the compression phase, when it exists, does not arise from stochasticity in training by demonstrating that we can replicate the IB findings using full batch gradient descent rather than stochastic gradient descent. Finally, we show that when an input domain consists of a subset of task-relevant and task-irrelevant information, hidden representations do compress the task-irrelevant information, although the overall information about the input may monotonically increase with training time, and that this compression happens concurrently with the fitting process rather than during a subsequent compression period."
posthttps://reddit.com/r/MachineLearning/comments/be8qie/discussion_what_is_the_status_of_the_information/el9eqwfpaper"Scalable Mutual Information Estimation using Dependence Graphs" by Noshad et al.
"Estimating Information Flow in Neural Networks" Goldfeld et al.
generalization information bottleneck
"We study the flow of information and the evolution of internal representations during deep neural network training, aiming to demystify the compression aspect of the information bottleneck theory. The theory suggests that DNN training comprises a rapid fitting phase followed by a slower compression phase, in which the mutual information I(X;T) between the input X and internal representations T decreases. Several papers observe compression of estimated mutual information on different DNN models, but the true I(X;T) over these networks is provably either constant (discrete X) or infinite (continuous X). This work explains the discrepancy between theory and experiments, and clarifies what was actually measured by these past works. To this end, we introduce an auxiliary (noisy) DNN framework for which I(X;T) is a meaningful quantity that depends on the network's parameters. This noisy framework is shown to be a good proxy for the original (deterministic) DNN both in terms of performance and the learned representations. We then develop a rigorous estimator for I(X;T) in noisy DNNs and observe compression in various models. By relating I(X;T) in the noisy DNN to an information-theoretic communication problem, we show that compression is driven by the progressive clustering of hidden representations of inputs from the same class. Several methods to directly monitor clustering of hidden representations, both in noisy and deterministic DNNs, are used to show that meaningful clusters form in the T space. Finally, we return to the estimator of I(X;T) employed in past works, and demonstrate that while it fails to capture the true (vacuous) mutual information, it does serve as a measure for clustering. This clarifies the past observations of compression and isolates the geometric clustering of hidden representations as the true phenomenon of interest."
"Deep Variational Information Bottleneck" Alemi, Fischer, Dillon, Murphy
generalization information bottleneck
"The Information Bottleneck principle is appealing, since it defines what we mean by a good representation, in terms of the fundamental tradeoff between having a concise representation and one with good predictive power. The main drawback of the IB principle is that computing mutual information is, in general, computationally challenging. We propose to use variational inference to construct a lower bound on the IB objective. By using the reparameterization trick, we can use Monte Carlo sampling to get an unbiased estimate of the gradient, and hence we can optimize the objective using stochastic gradient descent. This allows us to use deep neural networks to parameterize our distributions, and thus to handle high-dimensional, continuous data, such as images, avoiding the previous restrictions to the discrete or Gaussian cases." "Stochastic neural networks, fit using our VIB method, are robust to overfitting, since VIB finds a representation Z which ignores as many details of the input X as possible. In addition, they are more robust to adversarial inputs than deterministic models which are fit using (penalized) maximum likelihood estimation. Intuitively this is because each input image gets mapped to a distribution rather than a unique Z, so it is more difficult to pass small, idiosyncratic perturbations through the latent bottleneck."
- https://en.wikipedia.org/wiki/Information_bottleneck_method
codehttps://github.com/alexalemi/vib_democodehttps://github.com/1Konny/VIB-pytorch
generalization information bottleneck
"We have presented bounds, some of which tight, that connect the amount of information in the weights, the amount of information in the activations, the invariance property of the network, and the geometry of the residual loss."
"This leads to the somewhat surprising result that reducing information stored in the weights about the past (dataset) results in desirable properties of the representation of future data (test datum)."
"We conducted experiments to validate the assumptions underlying these bounds, and found that the results match the qualitative behavior observed on real data and architectures. In particular, the theory predicts a verifiable phase transition between an underfitting and overfitting regime for random labels, and the amount of information in nats needed to cross the transition."
"We show that in a deep neural network invariance to nuisance factors is equivalent to information minimality of the learned representation, and that stacking layers and injecting noise during training naturally bias the network towards learning invariant representations. We then show that, in order to avoid memorization, we need to limit the quantity of information stored in the weights, which leads to a novel usage of the Information Bottleneck Lagrangian on the weights as a learning criterion."
"Information Bottleneck principle: minimize mutual information of the representation with the training data."
- https://en.wikipedia.org/wiki/Information_bottleneck_method
videohttps://youtube.com/watch?v=Wgvcxd98tvU (Achille)videohttps://youtube.com/watch?v=BCSoRTMYQcw (Achille)videohttps://youtube.com/watch?v=zbg49SMP5kY (Soatto)
"Intriguing Properties of Neural Networks" Szegedy, Zaremba, Sutskever, Bruna, Erhan, Goodfellow, Fergus
generalization
"Deep neural networks are highly expressive models that have recently achieved state of the art performance on speech and visual recognition tasks. While their expressiveness is the reason they succeed, it also causes them to learn uninterpretable solutions that could have counter-intuitive properties. In this paper we report two such properties. First, we find that there is no distinction between individual high level units and random linear combinations of high level units, according to various methods of unit analysis. It suggests that it is the space, rather than the individual units, that contains the semantic information in the high layers of neural networks. Second, we find that deep neural networks learn input-output mappings that are fairly discontinuous to a significant extent. We can cause the network to misclassify an image by applying a certain hardly perceptible perturbation, which is found by maximizing the network’s prediction error. In addition, the specific nature of these perturbations is not a random artifact of learning: the same perturbation can cause a different network, that was trained on a different subset of the dataset, to misclassify the same input."
videohttps://youtu.be/iuhmBFbY4Xw?t=1h10m46s (Szegedy)videohttp://youtube.com/watch?v=pdODJ7JQfjo (Zaremba)posthttps://danieltakeshi.github.io/2019/04/27/adversarial-stuff
"Explaining and Harnessing Adversarial Examples" Goodfellow, Shlens, Szegedy
generalization
"Several machine learning models, including neural networks, consistently misclassify adversarial examples - inputs formed by applying small but intentionally worst-case perturbations to examples from the dataset, such that the perturbed input results in the model outputting an incorrect answer with high confidence. Early attempts at explaining this phenomenon focused on nonlinearity and overfitting. We argue instead that the primary cause of neural networks’ vulnerability to adversarial perturbation is their linear nature. This explanation is supported by new quantitative results while giving the first explanation of the most intriguing fact about them: their generalization across architectures and training sets. Moreover, this view yields a simple and fast method of generating adversarial examples. Using this approach to provide examples for adversarial training, we reduce the test set error of a maxout network on the MNIST dataset."
"The criticism of deep networks as vulnerable to adversarial examples is misguided, because unlike shallow linear models, deep networks are at least able to represent functions that resist adversarial perturbation.
"Adversarial examples can be explained as a property of high-dimensional dot products. They are a result of models being too linear, rather than too nonlinear.
The generalization of adversarial examples across different models can be explained as a result of adversarial perturbations being highly aligned with the weight vectors of a model, and different models learning similar functions when trained to perform the same task.
The direction of perturbation, rather than the specific point in space, matters most. Space is not full of pockets of adversarial examples that finely tile the reals like the rational numbers.
Because it is the direction that matters most, adversarial perturbations generalize across different clean examples.
Adversarial training can result in regularization; even further regularization than dropout.
Models that are easy to optimize are easy to perturb.
Fooling examples are ubiquitous and easily generated.
RBF networks are resistant to adversarial examples.
Linear models lack the capacity to resist adversarial perturbation; only structures with a hidden layer (where the universal approximator theorem applies) should be trained to resist adversarial perturbation.
Models trained to model the input distribution are not resistant to adversarial examples.
Ensembles are not resistant to adversarial examples.
Shallow linear models are not resistant to fooling examples."
"Competence of CNNs is relatively limited to a small region around the data manifold that contains natural-looking images and distributions, and that once we artificially push images away from this manifold by computing noise patterns with backpropagation, we stumble into parts of image space where all bets are off, and where the linear functions in the network induce large subspaces of fooling inputs. With wishful thinking, one might hope that ConvNets would produce all-diffuse probabilities in regions outside the training data, but there is no part in an ordinary objective (e.g. mean cross-entropy loss) that explicitly enforces this constraint. Indeed, it seems that the class scores in these regions of space are all over the place, and worse, a straight-forward attempt to patch this up by introducing a background class and iteratively adding fooling images as a new background class during training are not effective in mitigating the problem. It seems that to fix this problem we need to change our objectives, our forward functional forms, or even the way we optimize our models."
"Neural nets turn out to be much more linear as a function of their input than we expected (more precisely, neural nets are piecewise linear, and the linear pieces with non-negligible slope are much bigger than we expected). On a continuum from "linear function" to "incomprehensibly complicated nonlinear function", neural nets as they are used in practice are usually much further toward the left end of the continuum than most people think."
"ReLUs have 2 states: on and off. They're linear when they're on and they're constant 0 when they're off. Now consider an input x. There is some neighbourhood around x where you don't change the states of any ReLU unit in the network. In that neighbourhood, the network behaves exactly as a linear (affine, when you consider biases) function. That's what is meant by linear: as you move around in x space, you hit different on/off configurations of the units, each which is a locally affine function."
Yoshua Bengio:
"My conjecture is that good unsupervised learning should generally be much more robust to adversarial distortions because it tries to discriminate the data manifold from its surroundings, in ALL non-manifold directions (at every point on the manifold). This is in contrast with supervised learning, which only needs to worry about the directions that discriminate between the observed classes. Because the number of classes is much less than the dimensionality of the space, for image data, supervised learning is therefore highly underconstrained, leaving many directions of changed "unchecked" (i.e. to which the model is either insensitive when it should not or too sensitive in the wrong way)."
videohttp://youtube.com/watch?v=Pq4A2mPCB0Y (Goodfellow)videohttp://youtube.com/watch?v=hDlHpBBGaKs (Goodfellow)videohttp://videolectures.net/deeplearning2015_goodfellow_adversarial_examples/ (Goodfellow)posthttp://kdnuggets.com/2015/07/deep-learning-adversarial-examples-misconceptions.htmlposthttps://danieltakeshi.github.io/2019/04/27/adversarial-stuff/posthttps://karpathy.github.io/2015/03/30/breaking-convnets/noteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1412.6572codehttps://github.com/tensorflow/cleverhanscodehttps://github.com/bethgelab/foolbox
"Distilling the Knowledge in a Neural Network" Hinton, Vinyals, Dean
generalization
"A very simple way to improve the performance of almost any machine learning algorithm is to train many different models on the same data and then to average their predictions. Unfortunately, making predictions using a whole ensemble of models is cumbersome and may be too computationally expensive to allow deployment to a large number of users, especially if the individual models are large neural nets. Caruana and his collaborators have shown that it is possible to compress the knowledge in an ensemble into a single model which is much easier to deploy and we develop this approach further using a different compression technique. We achieve some surprising results on MNIST and we show that we can significantly improve the acoustic model of a heavily used commercial system by distilling the knowledge in an ensemble of models into a single model. We also introduce a new type of ensemble composed of one or more full models and many specialist models which learn to distinguish fine-grained classes that the full models confuse. Unlike a mixture of experts, these specialist models can be trained rapidly and in parallel."
"How can we produce neural nets that learn good representations without as much training data or parameters?"
"A simple way to improve classification performance is to average the predictions of a large ensemble of different classifiers. This is great for winning competitions but requires too much computation at test time for practical applications such as speech recognition. In a widely ignored paper in 2006, Caruana and his collaborators showed that the knowledge in the ensemble could be transferred to a single, efficient model by training the single model to mimic the log probabilities of the ensemble average. This technique works because most of the knowledge in the learned ensemble is in the relative probabilities of extremely improbable wrong answers. For example, the ensemble may give a BMW a probability of one in a billion of being a garbage truck but this is still far greater (in the log domain) than its probability of being a carrot. This "dark knowledge", which is practically invisible in the class probabilities, defines a similarity metric over the classes that makes it much easier to learn a good classifier. I will describe a new variation of this technique called "distillation" and will show some surprising examples in which good classifiers over all of the classes can be learned from data in which some of the classes are entirely absent, provided the targets come from an ensemble that has been trained on all of the classes. I will also show how this technique can be used to improve a state-of-the-art acoustic model and will discuss its application to learning large sets of specialist models without overfitting."
"Train a large network on the original training labels, then learn a much smaller “distilled” model on a weighted combination of the original labels and the (softened) softmax output of the larger model. The authors show that the distilled model has better generalization ability than a model trained on just the labels."
videohttps://youtube.com/watch?v=EK61htlw8hY (Hinton)videohttp://videolectures.net/deeplearning2017_larochelle_neural_networks/ (part 2, 1:28:45) (Larochelle)videohttps://youtube.com/watch?v=-4PGNj1CqZc (Truskovskyi)in russianvideohttps://youtu.be/wfbe2yaXAkI?t=1h43m35s (Vorontsov)in russianposthttps://wandb.ai/authors/knowledge-distillation/reports/Distilling-Knowledge-in-Neural-Networks--VmlldzoyMjkxODkpaper"Distilling a Neural Network Into a Soft Decision Tree" by Frosst, Hinton
generalization
"Deep CNNs are known to exhibit the following peculiarity: on the one hand they generalize extremely well to a test set, while on the other hand they are extremely sensitive to so-called adversarial perturbations. The extreme sensitivity of high performance CNNs to adversarial examples casts serious doubt that these networks are learning high level abstractions in the dataset. We are concerned with the following question: How can a deep CNN that does not learn any high level semantics of the dataset manage to generalize so well?"
"The goal of this article is to measure the tendency of CNNs to learn surface statistical regularities of the dataset. To this end, we use Fourier filtering to construct datasets which share the exact same high level abstractions but exhibit qualitatively different surface statistical regularities. For the SVHN and CIFAR-10 datasets, we present two Fourier filtered variants: a low frequency variant and a randomly filtered variant. Each of the Fourier filtering schemes is tuned to preserve the recognizability of the objects. Our main finding is that CNNs exhibit a tendency to latch onto the Fourier image statistics of the training dataset, sometimes exhibiting up to a 28% generalization gap across the various test sets. Moreover, we observe that significantly increasing the depth of a network has a very marginal impact on closing the aforementioned generalization gap. Thus we provide quantitative evidence supporting the hypothesis that deep CNNs tend to learn surface statistical regularities in the dataset rather than higher-level abstract concepts."
"Deep Image Prior" Ulyanov, Vedaldi, Lempitsky
generalization
"Deep convolutional networks have become a popular tool for image generation and restoration. Generally, their excellent performance is imputed to their ability to learn realistic image priors from a large number of example images. In this paper, we show that, on the contrary, the structure of a generator network is sufficient to capture a great deal of low-level image statistics prior to any learning. In order to do so, we show that a randomly-initialized neural network can be used as a handcrafted prior with excellent results in standard inverse problems such as denoising, superresolution, and inpainting. Furthermore, the same prior can be used to invert deep neural representations to diagnose them, and to restore images based on flash-no flash input pairs."
"We show that this very simple formulation is very competitive for standard image processing problems such as denoising, inpainting and super-resolution. This is particularly remarkable because no aspect of the network is learned from data; instead, the weights of the network are always randomly initialized, so that the only prior information is in the structure of the network itself."
"One may wonder why a high-capacity network fθ can be used as a prior at all. In fact, one may expect to be able to find parameters θ recovering any possible image x, including random noise, so that the network should not impose any restriction on the generated image. We now show that, while indeed almost any image can be fitted, the choice of network architecture has a major effect on how the solution space is searched by methods such as gradient descent. In particular, we show that the network resists “bad” solutions and descends much more quickly towards naturally-looking images. The result is that minimizing (2) either results in a good-looking local optimum, or, at least, the optimization trajectory passes near one."
"Thus, although in the limit the parametrization can fit unstructured noise, it does so very reluctantly. In other words, the parametrization offers high impedance to noise and low impedance to signal. Therefore for most applications, we restrict the number of iterations in the optimization process (2) to a certain number of iterations. The resulting prior then corresponds to projection onto a reduced set of images that can be produced from z by ConvNets with parameters θ that are not too far from the random initialization θ0."
- https://dmitryulyanov.github.io/deep_image_prior
videohttps://youtube.com/watch?v=fj0yLTa_bmA (Ulyanov)posthttps://towardsdatascience.com/demystifying-deep-image-prior-7076e777e5baposthttps://people.cs.umass.edu/~zezhoucheng/gp-dipcodehttps://github.com/DmitryUlyanov/deep-image-prior
"Train Faster, Generalize Better: Stability of Stochastic Gradient Descent" Hardt, Recht, Singer
generalization optimization
"We show that parametric models trained by a stochastic gradient method with few iterations have vanishing generalization error. We prove our results by arguing that SGM is algorithmically stable in the sense of Bousquet and Elisseeff. Our analysis only employs elementary tools from convex and continuous optimization. We derive stability bounds for both convex and non-convex optimization under standard Lipschitz and smoothness assumptions. Applying our results to the convex case, we provide new insights for why multiple epochs of stochastic gradient methods generalize well in practice. In the non-convex case, we give a new interpretation of common practices in neural networks, and formally show that popular techniques for training large deep models are indeed stability-promoting. Our findings conceptually underscore the importance of reducing training time beyond its obvious benefit."
videohttp://techtalks.tv/talks/train-faster-generalize-better-stability-of-stochastic-gradient-descent/62637/ (Recht)posthttp://argmin.net/2016/04/18/bottoming-out/ (Recht)posthttp://www.offconvex.org/2016/03/14/stability/ (Hardt)posthttp://www.offconvex.org/2016/03/22/saddlepoints/ (Ge)posthttp://www.offconvex.org/2016/03/24/saddles-again/ (Recht)
"Identifying and Attacking the Saddle Point Problem in High-dimensional Non-convex Optimization" Dauphin, Pascanu, Gulcehre, Cho, Ganguli, Bengio
optimization
"A central challenge to many fields of science and engineering involves minimizing non-convex error functions over continuous, high dimensional spaces. Gradient descent or quasi-Newton methods are almost ubiquitously used to perform such minimizations, and it is often thought that a main source of difficulty for these local methods to find the global minimum is the proliferation of local minima with much higher error than the global minimum. Here we argue, based on results from statistical physics, random matrix theory, neural network theory, and empirical evidence, that a deeper and more profound difficulty originates from the proliferation of saddle points, not local minima, especially in high dimensional problems of practical interest. Such saddle points are surrounded by high error plateaus that can dramatically slow down learning, and give the illusory impression of the existence of a local minimum. Motivated by these arguments, we propose a new approach to second-order optimization, the saddle-free Newton method, that can rapidly escape high dimensional saddle points, unlike gradient descent and quasi-Newton methods. We apply this algorithm to deep or recurrent neural network training, and provide numerical evidence for its superior optimization performance."
"In summary, we have drawn from disparate literatures spanning statistical physics and random matrix theory to neural network theory, to argue that (a) non-convex error surfaces in high dimensional spaces generically suffer from a proliferation of saddle points, and (b) in contrast to conventional wisdom derived from low dimensional intuition, local minima with high error are exponentially rare in high dimensions. Moreover, we have provided the first experimental tests of these theories by performing new measurements of the statistical properties of critical points in neural network error surfaces. These tests were enabled by a novel application of Newton’s method to search for critical points of any index (fraction of negative eigenvalues), and they confirmed the main qualitative prediction of theory that the index of a critical point tightly and positively correlates with its error level."
"It is often the case that our geometric intuition, derived from experience within a low dimensional physical world, is inadequate for thinking about the geometry of typical error surfaces in high-dimensional spaces. To illustrate this, consider minimizing a randomly chosen error function of a single scalar variable, given by a single draw of a Gaussian process. (Rasmussen and Williams, 2005) have shown that such a random error function would have many local minima and maxima, with high probability over the choice of the function, but saddles would occur with negligible probability. On the other-hand, as we review below, typical, random Gaussian error functions over N scalar variables, or dimensions, are increasingly likely to have saddle points rather than local minima as N increases. Indeed the ratio of the number of saddle points to local minima increases exponentially with the dimensionality N."
"A typical problem for both local minima and saddle-points is that they are often surrounded by plateaus of small curvature in the error. While gradient descent dynamics are repelled away from a saddle point to lower error by following directions of negative curvature, this repulsion can occur slowly due to the plateau. Second order methods, like the Newton method, are designed to rapidly descend plateaus surrounding local minima by rescaling gradient steps by the inverse eigenvalues of the Hessian matrix. However, the Newton method does not treat saddle points appropriately; as argued below, saddle-points instead become attractive under the Newton dynamics. Thus, given the proliferation of saddle points, not local minima, in high dimensional problems, the entire theoretical justification for quasi-Newton methods, i.e. the ability to rapidly descend to the bottom of a convex local minimum, becomes less relevant in high dimensional non-convex optimization."
videohttp://videocrm.ca/Machine18/Machine18-20180423-5-YoshuaBengio.mp4 (32:31) (Bengio)videohttp://videolectures.net/deeplearning2017_larochelle_neural_networks/ (part 2, 1:16:54) (Larochelle)
"Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift" Ioffe, Szegedy
optimization
"Training Deep Neural Networks is complicated by the fact that the distribution of each layer’s inputs changes during training, as the parameters of the previous layers change. This slows down the training by requiring lower learning rates and careful parameter initialization, and makes it notoriously hard to train models with saturating nonlinearities. We refer to this phenomenon as internal covariate shift, and address the problem by normalizing layer inputs. Our method draws its strength from making normalization a part of the model architecture and performing the normalization for each training mini-batch. Batch Normalization allows us to use much higher learning rates and be less careful about initialization, and in some cases eliminates the need for Dropout. Applied to a stateof-the-art image classification model, Batch Normalization achieves the same accuracy with 14 times fewer training steps, and beats the original model by a significant margin. Using an ensemble of batch-normalized networks, we improve upon the best published result on ImageNet classification: reaching 4.82% top-5 test error, exceeding the accuracy of human raters."
"We have presented a novel mechanism for dramatically accelerating the training of deep networks. It is based on the premise that covariate shift, which is known to complicate the training of machine learning systems, also applies to sub-networks and layers, and removing it from internal activations of the network may aid in training. Our proposed method draws its power from normalizing activations, and from incorporating this normalization in the network architecture itself. This ensures that the normalization is appropriately handled by any optimization method that is being used to train the network. To enable stochastic optimization methods commonly used in deep network training, we perform the normalization for each mini-batch, and backpropagate the gradients through the normalization parameters. Batch Normalization adds only two extra parameters per activation, and in doing so preserves the representation ability of the network. We presented an algorithm for constructing, training, and performing inference with batch-normalized networks. The resulting networks can be trained with saturating nonlinearities, are more tolerant to increased training rates, and often do not require Dropout for regularization. Merely adding Batch Normalization to a state-of-the-art image classification model yields a substantial speedup in training. By further increasing the learning rates, removing Dropout, and applying other modifications afforded by Batch Normalization, we reach the previous state of the art with only a small fraction of training steps - and then beat the state of the art in single-network image classification. Furthermore, by combining multiple models trained with Batch Normalization, we perform better than the best known system on ImageNet, by a significant margin."
"In this work, we have not explored the full range of possibilities that Batch Normalization potentially enables. Our future work includes applications of our method to Recurrent Neural Networks, where the internal covariate shift and the vanishing or exploding gradients may be especially severe, and which would allow us to more thoroughly test the hypothesis that normalization improves gradient propagation. More study is needed of the regularization properties of Batch Normalization, which we believe to be responsible for the improvements we have observed when Dropout is removed from BN-Inception. We plan to investigate whether Batch Normalization can help with domain adaptation, in its traditional sense - i.e. whether the normalization performed by the network would allow it to more easily generalize to new data distributions, perhaps with just a recomputation of the population means and variances. Finally, we believe that further theoretical analysis of the algorithm would allow still more improvements and applications."
"We have found that removing Dropout from BN-Inception allows the network to achieve higher validation accuracy. We conjecture that Batch Normalization provides similar regularization benefits as Dropout, since the activations observed for a training example are affected by the random selection of examples in the same mini-batch."
"Batch norm is similar to dropout in the sense that it multiplies each hidden unit by a random value at each step of training. In this case, the random value is the standard deviation of all the hidden units in the minibatch. Because different examples are randomly chosen for inclusion in the minibatch at each step, the standard deviation randomly fluctuates. Batch norm also subtracts a random value (the mean of the minibatch) from each hidden unit at each step. Both of these sources of noise mean that every layer has to learn to be robust to a lot of variation in its input, just like with dropout."
videohttp://research.microsoft.com/apps/video/default.aspx?id=260019 (Ioffe)videohttp://videolectures.net/icml2015_ioffe_batch_normalization/ (Ioffe)videohttps://youtu.be/Xogn6veSyxA?t=3m46s (Goodfellow)videohttps://youtube.com/watch?v=OioFONrSETc (Kilcher)videohttps://youtube.com/watch?v=6b1JVBBX0dI (Raj)videohttps://youtube.com/watch?v=-1yfr_YBzX4 (Lykov)in russianposthttps://gradientscience.org/batchnormposthttps://kratzert.github.io/2016/02/12/understanding-the-gradient-flow-through-the-batch-normalization-layer.htmlposthttps://kevinzakka.github.io/2016/09/14/batch_normalization/posthttps://twitter.com/dcpage3/status/1171867587417952260noteshttp://www.shortscience.org/paper?bibtexKey=conf/icml/IoffeS15paper"How Does Batch Normalization Help Optimization?" by Santurkar et al. (post)
"Self-Normalizing Neural Networks" Klambauer, Unterthiner, Mayr, Hochreiter
optimization
"Deep Learning has revolutionized vision via convolutional neural networks (CNNs) and natural language processing via recurrent neural networks (RNNs). However, success stories of Deep Learning with standard feed-forward neural networks (FNNs) are rare. FNNs that perform well are typically shallow and, therefore cannot exploit many levels of abstract representations. We introduce self-normalizing neural networks (SNNs) to enable high-level abstract representations. While batch normalization requires explicit normalization, neuron activations of SNNs automatically converge towards zero mean and unit variance. The activation function of SNNs are "scaled exponential linear units" (SELUs), which induce self-normalizing properties. Using the Banach fixed-point theorem, we prove that activations close to zero mean and unit variance that are propagated through many network layers will converge towards zero mean and unit variance -- even under the presence of noise and perturbations. This convergence property of SNNs allows to (1) train deep networks with many layers, (2) employ strong regularization, and (3) to make learning highly robust. Furthermore, for activations not close to unit variance, we prove an upper and lower bound on the variance, thus, vanishing and exploding gradients are impossible. We compared SNNs on (a) 121 tasks from the UCI machine learning repository, on (b) drug discovery benchmarks, and on (c) astronomy tasks with standard FNNs and other machine learning methods such as random forests and support vector machines. SNNs significantly outperformed all competing FNN methods at 121 UCI tasks, outperformed all competing methods at the Tox21 dataset, and set a new record at an astronomy data set. The winning SNN architectures are often very deep."
"Weights are initialized in such a way that for any unit in a layer with input weights wi Σ wi = 0 and Σ wi^2 = 1." "selu(x) = λx for x>0 and selu(x) = λ(αe^x − α) for x≤0, where α≈1.6733 and λ≈1.0507"
videohttps://facebook.com/nipsfoundation/videos/1555553784535855?t=2824 (Klambauer)videohttps://youtube.com/watch?v=h6eQrkkU9SA (Hochreiter)videohttps://youtu.be/NZEAqdepq0w?t=34m3s (Hochreiter)videohttps://youtube.com/watch?v=gH-KWepKSNs (Klambauer)noteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1706.02515noteshttps://bayesgroup.github.io/sufficient-statistics/posts/self-normalizing-neural-networks/in russiancodehttp://github.com/bioinf-jku/SNNs
"Measuring the Intrinsic Dimension of Objective Landscapes" Li, Farkhoor, Liu, Yosinski
interpretability
"Many recently trained neural networks employ large numbers of parameters to achieve good performance. One may intuitively use the number of parameters required as a rough gauge of the difficulty of a problem. But how accurate are such notions? How many parameters are really needed? In this paper we attempt to answer this question by training networks not in their native parameter space, but instead in a smaller, randomly oriented subspace. We slowly increase the dimension of this subspace, note at which dimension solutions first appear, and define this to be the intrinsic dimension of the objective landscape. The approach is simple to implement, computationally tractable, and produces several suggestive conclusions. Many problems have smaller intrinsic dimensions than one might suspect, and the intrinsic dimension for a given dataset varies little across a family of models with vastly different sizes. This latter result has the profound implication that once a parameter space is large enough to solve a problem, extra parameters serve directly to increase the dimensionality of the solution manifold. Intrinsic dimension allows some quantitative comparison of problem difficulty across supervised, reinforcement, and other types of learning where we conclude, for example, that solving the inverted pendulum problem is 100 times easier than classifying digits from MNIST, and playing Atari Pong from pixels is about as hard as classifying CIFAR-10."
- https://eng.uber.com/intrinsic-dimension
videohttps://youtube.com/watch?v=uSZWeRADTFIcodehttps://github.com/uber-research/intrinsic-dimension
"On Calibration of Modern Neural Networks" Guo, Pleiss, Sun, Weinberger
interpretability
"Confidence calibration - the problem of predicting probability estimates representative of the true correctness likelihood - is important for classification models in many applications. We discover that modern neural networks, unlike those from a decade ago, are poorly calibrated. Through extensive experiments, we observe that depth, width, weight decay, and Batch Normalization are important factors influencing calibration. We evaluate the performance of various post-processing calibration methods on state-of-the-art architectures with image and document classification datasets. Our analysis and experiments not only offer insights into neural network learning, but also provide a simple and straightforward recipe for practical settings: on most datasets, temperature scaling - a single-parameter variant of Platt Scaling - is surprisingly effective at calibrating predictions."
"A network should provide a calibrated confidence measure in addition to its prediction. In other words, the probability associated with the predicted class label should reflect its ground truth correctness likelihood. Calibrated confidence estimates are also important for model interpretability. Good confidence estimates provide a valuable extra bit of information to establish trustworthiness with the user - especially for neural networks, whose classification decisions are often difficult to interpret. Further, good probability estimates can be used to incorporate neural networks into other probabilistic models."
videohttps://vimeo.com/238242536 (Pleiss)
interpretability
"How can we explain the predictions of a black-box model? In this paper, we use influence functions -- a classic technique from robust statistics -- to trace a model's prediction through the learning algorithm and back to its training data, thereby identifying training points most responsible for a given prediction. To scale up influence functions to modern machine learning settings, we develop a simple, efficient implementation that requires only oracle access to gradients and Hessian-vector products. We show that even on non-convex and non-differentiable models where the theory breaks down, approximations to influence functions can still provide valuable information. On linear models and convolutional neural networks, we demonstrate that influence functions are useful for multiple purposes: understanding model behavior, debugging models, detecting dataset errors, and even creating visually-indistinguishable training-set attacks."
"We use influence functions, a classic technique from robust statistics, to trace a model's prediction through the learning algorithm and back to its training data, thereby identifying training points most responsible for a given prediction."
"We show that even on non-convex and non-differentiable models where the theory breaks down, approximations to influence functions can still provide valuable information."
"On linear models and convolutional neural networks, we demonstrate that influence functions are useful for multiple purposes: understanding model behavior, debugging models, detecting dataset errors, and even creating visually-indistinguishable training-set attacks."
videohttps://youtube.com/watch?v=0w9fLX_T6tY (Koh)videohttps://vimeo.com/237274831 (Koh)videohttps://facebook.com/academics/videos/1633085090076225?t=5008 (Liang)videohttps://youtube.com/watch?v=dk6UsEzfKdU (Matushkin)in russiannoteshttps://www.shortscience.org/paper?bibtexKey=conf/icml/KohL17codehttps://github.com/kohpangwei/influence-releasecodehttps://github.com/darkonhub/darkon
"This document has been motivated by the suggestion that there might be opportunities for research in the area of “deep learning”. I intend to approach the task of constructing a research strategy in three steps. First identify key issues which require attention, then identify existing solutions and finally to target applications for funding at things which have not been addressed.
This document only begins the first of these stages and is intended as the basis for a discussion. It concentrates on trying to answer the following questions:
What do people mean when they refer to “Deep Learning”, in particular how is it different to a conventional Artificial Neural Network?
What is optimised when we train a neural network to minimise cross-entropy?
What are the consequences for model selection?
What are the consequences for ANN methods when interpreted as “state-of-the-art”?
What are the consequences for scientific use?"
"Monte Carlo Gradient Estimation in Machine Learning" Mohamed, Rosca, Figurnov, Mnih
gradient estimation
"This paper is a broad and accessible survey of the methods we have at our disposal for Monte Carlo gradient estimation in machine learning and across the statistical sciences: the problem of computing the gradient of an expectation of a function with respect to parameters defining the distribution that is integrated; the problem of sensitivity analysis. In machine learning research, this gradient problem lies at the core of many learning problems, in supervised, unsupervised and reinforcement learning. We will generally seek to rewrite such gradients in a form that allows for Monte Carlo estimation, allowing them to be easily and efficiently used and analysed. We explore three strategies--the pathwise, score function, and measure-valued gradient estimators--exploring their historical developments, derivation, and underlying assumptions. We describe their use in other fields, show how they are related and can be combined, and expand on their possible generalisations."
"Estimating or Propagating Gradients Through Stochastic Neurons for Conditional Computation" Bengio, Leonard, Courville
gradient estimation straight-through estimator
"Stochastic neurons and hard non-linearities can be useful for a number of reasons in deep learning models, but in many cases they pose a challenging problem: how to estimate the gradient of a loss function with respect to the input of such stochastic or non-smooth neurons? I.e., can we “back-propagate” through these stochastic neurons? We examine this question, existing approaches, and compare four families of solutions, applicable in different settings. One of them is the minimum variance unbiased gradient estimator for stochatic binary neurons (a special case of the REINFORCE algorithm). A second approach, introduced here, decomposes the operation of a binary stochastic neuron into a stochastic binary part and a smooth differentiable part, which approximates the expected effect of the pure stochatic binary neuron to first order. A third approach involves the injection of additive or multiplicative noise in a computational graph that is otherwise differentiable. A fourth approach heuristically copies the gradient with respect to the stochastic output directly as an estimator of the gradient with respect to the sigmoid argument (we call this the straight-through estimator). To explore a context where these estimators are useful, we consider a small-scale version of conditional computation, where sparse stochastic units form a distributed representation of gaters that can turn off in combinatorially many ways large chunks of the computation performed in the rest of the neural network. In this case, it is important that the gating units produce an actual 0 most of the time. The resulting sparsity can be potentially be exploited to greatly reduce the computational cost of large deep networks for which conditional computation would be useful."
videohttp://videocrm.ca/Machine18/Machine18-20180423-5-YoshuaBengio.mp4 (14:35) (Bengio)videohttps://youtu.be/_JTu50iDhkA?t=1h21m53s (Sobolev)
gradient estimation NVIL
"Highly expressive directed latent variable models, such as sigmoid belief networks, are difficult to train on large datasets because exact inference in them is intractable and none of the approximate inference methods that have been applied to them scale well. We propose a fast non-iterative approximate inference method that uses a feedforward network to implement efficient exact sampling from the variational posterior. The model and this inference network are trained jointly by maximizing a variational lower bound on the log-likelihood. Although the naive estimator of the inference model gradient is too high-variance to be useful, we make it practical by applying several straightforward model-independent variance reduction techniques. Applying our approach to training sigmoid belief networks and deep autoregressive networks, we show that it outperforms the wake-sleep algorithm on MNIST and achieves state-of-the-art results on the Reuters RCV1 document dataset."
videohttps://youtu.be/UF4gYuJWGko?t=38m11s (Sobolev)videohttps://youtu.be/UF4gYuJWGko?t=37m57s (Sobolev)posthttp://artem.sobolev.name/posts/2017-11-12-stochastic-computation-graphs-fixing-reinforce.html
"Gradient Estimation Using Stochastic Computation Graphs" Schulman, Heess, Weber, Abbeel
gradient estimation
"In a variety of problems originating in supervised, unsupervised, and reinforcement learning, the loss function is defined by an expectation over a collection of random variables, which might be part of a probabilistic model or the external world. Estimating the gradient of this loss function, using samples, lies at the core of gradient-based learning algorithms for these problems. We introduce the formalism of stochastic computation graphs---directed acyclic graphs that include both deterministic functions and conditional probability distributions---and describe how to easily and automatically derive an unbiased estimator of the loss function's gradient. The resulting algorithm for computing the gradient estimator is a simple modification of the standard backpropagation algorithm. The generic scheme we propose unifies estimators derived in variety of prior work, along with variance-reduction techniques therein. It could assist researchers in developing intricate models involving a combination of stochastic and deterministic operations, enabling, for example, attention, memory, and control actions."
"We have developed a framework for describing a computation with stochastic and deterministic operations, called a stochastic computation graph. Given a stochastic computation graph, we can automatically obtain a gradient estimator, given that the graph satisfies the appropriate conditions on differentiability of the functions at its nodes. The gradient can be computed efficiently in a backwards traversal through the graph: one approach is to apply the standard backpropagation algorithm to one of the surrogate loss functions; another approach (which is roughly equivalent) is to apply a modified backpropagation procedure. The results we have presented are sufficiently general to automatically reproduce a variety of gradient estimators that have been derived in prior work in reinforcement learning and probabilistic modeling. We hope that this work will facilitate further development of interesting and expressive models."
"Can mix and match likelihood ratio and path derivative. If black-box node: might need to place stochastic node in front of it and use likelihood ratio. This includes recurrent neural net policies."
videohttps://youtube.com/watch?v=jmMsNQ2eug4 (Schulman)videohttp://videolectures.net/deeplearning2016_abbeel_deep_reinforcement/#t=3724 (Abbeel)videohttps://facebook.com/icml.imls/videos/429607650887089?t=281 (Foerster)noteshttps://yobibyte.github.io/files/paper_notes/scg.pdfpaper"Optimizing Expectations: From Deep Reinforcement Learning to Stochastic Computation Graphs" by Schulman
"MuProp: Unbiased Backpropagation for Stochastic Neural Networks" Gu, Levine, Sutskever, Mnih
gradient estimation MuProp
"Deep neural networks are powerful parametric models that can be trained efficiently using the backpropagation algorithm. Stochastic neural networks combine the power of large parametric functions with that of graphical models, which makes it possible to learn very complex distributions. However, as backpropagation is not directly applicable to stochastic networks that include discrete sampling operations within their computational graph, training such networks remains difficult. We present MuProp, an unbiased gradient estimator for stochastic networks, designed to make this task easier. MuProp improves on the likelihood-ratio estimator by reducing its variance using a control variate based on the first-order Taylor expansion of a mean-field network. Crucially, unlike prior attempts at using backpropagation for training stochastic networks, the resulting estimator is unbiased and well behaved. Our experiments on structured output prediction and discrete latent variable modeling demonstrate that MuProp yields consistently good performance across a range of difficult tasks."
"In this paper, we presented MuProp, which is an unbiased estimator of derivatives in stochastic computational graphs that combines the statistical efficiency of backpropagation with the correctness of a likelihood ratio method. MuProp has a number of natural extensions. First, we might consider using other functions for the baseline rather than just the Taylor expansion, which could be learned in a manner that resembles Q-learning and target propagation. In reinforcement learning, fitted Q-functions obtained by estimating the expected return of a given policy πθ summarize all future costs, and a good Q-function can greatly simplify the temporal credit assignment problem. Combining MuProp with such fitted Q-functions could greatly reduce the variance of the estimator and make it better suited for very deep computational graphs, such as long recurrent neural networks and applications in reinforcement learning. The second extension is to make x¯ depend on samples of its parent nodes. This could substantially improve performance on deeper networks, where the value from a singletrunk mean-field pass may diverge significantly from any samples drawn with a fully stochastic pass. By drawing x¯ using mean-field passes originating at sampled values from preceding layers would prevent such divergence, though at additional computational cost, since the number of mean-field passes would depend on the depth n of the network, for a total of O(n^2) partial passes through the network. Intuitively, the single mean-field “chain” would turn into a “tree,” with a sampled trunk and a different mean-field branch at each layer."
"The versatility of stochastic neural networks motivates research into more effective algorithms for training them. Models with continuous latent variables and simple approximate posteriors can already be trained efficiently using the variational lower bound along with the reparameterization trick, which makes it possible to train both the model and the inference network using backpropagation. Training models with discrete latent variable distributions, such as Bernoulli or multinomial, is considerably more difficult. Unbiased estimators based on the likelihood-ratio method tend to be significantly less effective than biased estimators, such as the straight-through method and the estimator proposed by Gregor et al. (2014). We hypothesize that this is due to the fact that, unlike the biased estimators, the unbiased ones do not take advantage of the gradient information provided by the backpropagation algorithm. However, the biased estimators are heuristic and not well understood, which means that it is difficult to enumerate the situations in which these estimators will work well. We posit that an effective method for training stochastic neural networks should take advantage of the highly efficient backpropagation algorithm, while still providing the convergence guarantees of an unbiased estimator."
"To that end, we derive MuProp, an unbiased gradient estimator for deep stochastic neural networks that is based on backpropagation. To the best of our knowledge, it is the first unbiased estimator that can handle both continuous and discrete stochastic variables while taking advantage of analytic gradient information. MuProp’s simple and general formulation allows a straightforward derivation of unbiased gradient estimators for arbitrary stochastic computational graphs – directed acyclic graph with a mix of stochastic and deterministic computational nodes. While the algorithm is applicable to both continuous and discrete distributions, we used only discrete models in our experiments, since the reparameterization trick already provides an effective method for handling continuous variables. We present experimental results for training neural networks with discrete Bernoulli and multinomial variables for both supervised and unsupervised learning tasks. With these models, which are notoriously difficult to train, biased methods often significantly outperform the unbiased ones, except in certain cases. Our results indicate that MuProp’s performance is more consistent and often superior to that of the competing estimators. It is the first time that a well-grounded, unbiased estimator consistently performs as well or better than the biased gradient estimators across a range of difficult tasks."
videohttps://youtu.be/UF4gYuJWGko?t=47m38s (Sobolev)videohttps://youtu.be/-KzvHc16HlM?t=47m44s (Sobolev)videohttps://youtu.be/hkRBoiaplEE?t=27m53s (Sobolev)videohttps://youtu.be/_XRBlhzb31U?t=25m19s (Figurnov)in russianposthttp://artem.sobolev.name/posts/2017-11-12-stochastic-computation-graphs-fixing-reinforce.htmlnoteshttp://dustintran.com/blog/muprop-unbiased-backpropagation-for-stochastic-neural-networks/noteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/GuLSM15codehttps://github.com/tensorflow/models/tree/master/research/rebar
variables with mixture distributions
"The ability to backpropagate stochastic gradients through continuous latent distributions has been crucial to the emergence of variational autoencoders and stochastic gradient variational Bayes. The key ingredient is an unbiased and low-variance way of estimating gradients with respect to distribution parameters from gradients evaluated at distribution samples. The "reparameterization trick" provides a class of transforms yielding such estimators for many continuous distributions, including the Gaussian and other members of the location-scale family. However the trick does not readily extend to mixture density models, due to the difficulty of reparameterizing the discrete distribution over mixture weights. This report describes an alternative transform, applicable to any continuous multivariate distribution with a differentiable density function from which samples can be drawn, and uses it to derive an unbiased estimator for mixture density weight derivatives. Combined with the reparameterization trick applied to the individual mixture components, this estimator makes it straightforward to train variational autoencoders with mixture-distributed latent variables, or to perform stochastic variational inference with a mixture density variational posterior."
videohttps://youtu.be/_JTu50iDhkA?t=21m54s (Sobolev)noteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1607.05690
"Reparameterization Gradients through Acceptance-Rejection Sampling Algorithms" Naesseth, Ruiz, Linderman, Blei
variables with complex distributions RSVI
"For many distributions of interest (such as the gamma or Dirichlet), simulation of random variables relies on acceptance-rejection sampling. The discontinuity introduced by the accept-reject step means that standard reparameterization tricks are not applicable. We propose a new method that lets us leverage reparameterization gradients even when variables are outputs of a acceptance-rejection sampling algorithm. Our approach enables reparameterization on a larger class of variational distributions."
videohttps://youtu.be/quIuMYSLaYM?t=17m21s (Ruiz)posthttps://casmls.github.io/general/2017/04/25/rsvi.htmlposthttp://artem.sobolev.name/posts/2017-09-10-stochastic-computation-graphs-continuous-case.html
"The Generalized Reparameterization Gradient" Ruiz, Titsias, Blei
variables with complex distributions
"The reparameterization gradient does not easily apply to commonly used distributions such as beta or gamma without further approximations, and most practical applications of the reparameterization gradient fit Gaussian distributions. We introduce the generalized reparameterization gradient, a method that extends the reparameterization gradient to a wider class of variational distributions. Generalized reparameterizations use invertible transformations of the latent variables which lead to transformed distributions that weakly depend on the variational parameters. This results in new Monte Carlo gradients that combine reparameterization gradients and score function gradients."
"Reparametrization removes dependence on parameters completely. What if we remove it just partially?"
videohttps://youtu.be/_JTu50iDhkA?t=29m20s (Sobolev)videohttps://youtu.be/mrj_hyH974o?t=1h23m40s (Vetrov)in russianposthttp://artem.sobolev.name/posts/2017-09-10-stochastic-computation-graphs-continuous-case.html
"The Concrete Distribution: A Continuous Relaxation of Discrete Random Variables" Maddison, Mnih, Teh
"Categorical Reparametrization with Gumbel-Softmax" Jang, Gu, Poole
variables with discrete distributions
"Continuous reparemetrisation based on the so-called Concrete or Gumbel-softmax distribution, which is a continuous distribution and has a temperature constant that can be annealed during training to converge to a discrete distribution in the limit. In the beginning of training the variance of the gradients is low but biased, and towards the end of training the variance becomes high but unbiased."
"Doesn't close the performance gap of VAEs with continuous latent variables where one can use the Gaussian reparameterisation trick which benefits from much lower variance in the gradients."
videohttp://www.fields.utoronto.ca/video-archive/2018/03/2509-18229 (Maddison)videohttp://youtube.com/watch?v=JFgXEbgcT7g (Jang)videohttps://facebook.com/nipsfoundation/videos/1555493854541848?t=1513 (Teh)videohttps://youtu.be/UF4gYuJWGko?t=14m58s (Sobolev)videohttps://youtu.be/UF4gYuJWGko?t=16m40s (Sobolev)videohttps://youtu.be/_JTu50iDhkA?t=55m53s (Sobolev)videohttp://videocrm.ca/Machine18/Machine18-20180423-5-YoshuaBengio.mp4 (23:39) (Bengio)videohttps://youtu.be/_XRBlhzb31U?t=28m33s (Figurnov)in russianvideohttps://youtube.com/watch?v=4KuAzkFIvNA (Vetrov)in russianposthttps://laurent-dinh.github.io/2016/11/21/gumbel-max.htmlposthttps://casmls.github.io/general/2017/02/01/GumbelSoftmax.htmlposthttp://timvieira.github.io/blog/post/2014/07/31/gumbel-max-trick/posthttps://cmaddis.github.io/gumbel-machineryposthttps://hips.seas.harvard.edu/blog/2013/04/06/the-gumbel-max-trick-for-discrete-distributions/posthttps://blog.evjang.com/2016/11/tutorial-categorical-variational.htmlposthttp://artem.sobolev.name/posts/2017-10-28-stochastic-computation-graphs-discrete-relaxations.htmlcodehttps://github.com/ericjang/gumbel-softmax/blob/master/gumbel_softmax_vae_v2.ipynbcodehttps://gist.github.com/gngdb/ef1999ce3a8e0c5cc2ed35f488e19748codehttps://github.com/EderSantana/gumbel
"REBAR: Low-variance, Unbiased Gradient Estimates for Discrete Latent Variable Models" Tucker, Mnih, Maddison, Lawson, Sohl-Dickstein
variables with discrete distributions REBAR
"Learning in models with discrete latent variables is challenging due to high variance gradient estimators. Generally, approaches have relied on control variates to reduce the variance of the REINFORCE estimator. Recent work (Jang et al. 2016; Maddison et al. 2016) has taken a different approach, introducing a continuous relaxation of discrete variables to produce low-variance, but biased, gradient estimates. In this work, we combine the two approaches through a novel control variate that produces low-variance, unbiased gradient estimates. Then, we introduce a novel continuous relaxation and show that the tightness of the relaxation can be adapted online, removing it as a hyperparameter."
"Using continuous relaxation to construct a control variate for functions of discrete random variables. Low-variance estimates of the expectation of the control variate can be computed using the reparameterization trick to produce an unbiased estimator with lower variance than previous methods. Showing how to tune the free parameters of these relaxations to minimize the estimator’s variance during training."
"REBAR gives unbiased gradients with lower variance than REINFORCE - self-tuning and general."
"Estimators for gradient ∇φ E pθ(h)[f(h)] of expectation over discrete distribution pθ(h): unbiased (REINFORCE, NVIL, MuProp) and biased (Straight Through, 1/2 estimator, Concrete/Gumbel-Softmax)."
videohttps://youtube.com/watch?v=QODYgBhv_novideohttps://facebook.com/nipsfoundation/videos/1554402064651027?t=993 (Tucker)videohttp://www.fields.utoronto.ca/video-archive/2018/03/2509-18229 (24:02) (Maddison)videohttps://youtu.be/-KzvHc16HlM?t=51m6s (Sobolev)videohttps://youtu.be/hkRBoiaplEE?t=34m27s (Sobolev)videohttps://youtu.be/8IerZhgoaJo?t=44m17s (Gadetskii)in russianposthttp://artem.sobolev.name/posts/2017-11-12-stochastic-computation-graphs-fixing-reinforce.htmlnoteshttp://tuananhle.co.uk/notes/rebar-relax.htmlcodehttps://github.com/tensorflow/models/tree/master/research/rebarcodehttps://github.com/Bonnevie/rebar
"Backpropagation through the Void: Optimizing Control Variates for Black-box Gradient Estimation" Grathwohl, Choi, Wu, Roeder, Duvenaud
variables with discrete distributions non-differentiable loss RELAX
"Gradient-based optimization is the foundation of deep learning and reinforcement learning. Even when the mechanism being optimized is unknown or not differentiable, optimization using high-variance or biased gradient estimates is still often the best strategy. We introduce a general framework for learning low-variance, unbiased gradient estimators for black-box functions of random variables. Our method uses gradients of a neural network trained jointly with model parameters or policies, and is applicable in both discrete and continuous settings. We demonstrate this framework for training discrete latent-variable models. We also give an unbiased, action-conditional extension of the advantage actor-critic reinforcement learning algorithm."
"We generalize REBAR to learn a free-form control variate parameterized by a neural network, giving a lower-variance, unbiased gradient estimator which can be applied to a wider variety of problems with greater flexibility. Most notably, our method is applicable even when no continuous relaxation is available, as in reinforcement learning or black box function optimization. Furthermore, we derive improved variants of popular reinforcement learning methods with unbiased, action-dependent gradient estimates and lower variance."
"Pros:
- unbiased
- low variance (after tuning)
- usable when f(b) is unknown or not differentiable
- usable when p(b|theta) is discrete"
"Cons:
- need to define surrogate
- when progress is made, need to wait for surrogate to adapt
- higher-order derivatives still awkward in TensorFlow and PyTorch"
"RELAX doesn't solve the problem of discrete random variables but it solves the problem of how to estimate gradient of function which value is known but how to compute or differentiate it is unknown (reinforcement learning and other applications)."
videohttps://youtube.com/watch?v=jHhevj0qM5M (Duvenaud)videohttps://vimeo.com/252185804 (Grathwohl)videohttp://www.fields.utoronto.ca/video-archive/2018/03/2509-18229 (30:37) (Maddison)videohttp://videocrm.ca/Machine18/Machine18-20180423-5-YoshuaBengio.mp4 (25:20) (Bengio)videohttps://youtu.be/hkRBoiaplEE?t=1h8m1s (Sobolev)videohttps://youtu.be/8IerZhgoaJo?t=1h7m29s (Gadetskii)in russianposthttp://artem.sobolev.name/posts/2017-11-12-stochastic-computation-graphs-fixing-reinforce.htmlnoteshttp://tuananhle.co.uk/notes/rebar-relax.htmlcodehttps://github.com/duvenaud/relaxcodehttps://github.com/Bonnevie/rebarpaper"Action-depedent Control Variates for Policy Optimization via Stein's Identity" by Liu et al. (talkvideo, overviewvideoin russian)
"DiCE: The Infinitely Differentiable Monte Carlo Estimator" Foerster, Farquhar, Al-Shedivat, Rocktaschel, Xing, Whiteson
"The score function estimator is widely used for estimating gradients of stochastic objectives in Stochastic Computation Graphs, e.g., in reinforcement learning and meta-learning. While deriving the first order gradient estimators by differentiating a surrogate loss (SL) objective is computationally and conceptually simple, using the same approach for higher order gradients is more challenging. Firstly, analytically deriving and implementing such estimators is laborious and not compliant with automatic differentiation. Secondly, repeatedly applying SL to construct new objectives for each order gradient involves increasingly cumbersome graph manipulations. Lastly, to match the first order gradient under differentiation, SL treats part of the cost as a fixed sample, which we show leads to missing and wrong terms for higher order gradient estimators. To address all these shortcomings in a unified way, we introduce DICE, which provides a single objective that can be differentiated repeatedly, generating correct gradient estimators of any order in SCGs. Unlike SL, DICE relies on automatic differentiation for performing the requisite graph manipulations. We verify the correctness of DICE both through a proof and through numerical evaluation of the DICE gradient estimates. We also use DICE to propose and evaluate a novel approach for multi-agent learning."
videohttps://facebook.com/icml.imls/videos/429607650887089?t=197 (Foerster)codehttps://github.com/tensorflow/probability/blob/master/tensorflow_probability/python/monte_carlo.pycodehttps://drive.google.com/drive/folders/1qjuLTdRbM5CoyNGEyaCJdFKJ9UEwhU28
interesting papers - variational autoencoder
interesting recent papers
interesting recent papers - variational autoencoders
interesting recent papers - unsupervised learning
interesting recent papers - model-based reinforcement learning
interesting recent papers - exploration and intrinsic motivation
"Variational Inference: A Review for Statisticians" Blei, Kucukelbir, McAuliffe
"One of the core problems of modern statistics is to approximate difficult-to-compute probability distributions. This problem is especially important in Bayesian statistics, which frames all inference about unknown quantities as a calculation about the posterior. In this paper, we review variational inference (VI), a method from machine learning that approximates probability distributions through optimization. VI has been used in myriad applications and tends to be faster than classical methods, such as Markov chain Monte Carlo sampling. The idea behind VI is to first posit a family of distributions and then to find the member of that family which is close to the target. Closeness is measured by Kullback-Leibler divergence. We review the ideas behind mean-field variational inference, discuss the special case of VI applied to exponential family models, present a full example with a Bayesian mixture of Gaussians, and derive a variant that uses stochastic optimization to scale up to massive data. We discuss modern research in VI and highlight important open problems. VI is powerful, but it is not yet well understood. Our hope in writing this paper is to catalyze statistical research on this widely-used class of algorithms."
"Advances in Variational Inference" Zhang, Butepage, Kjellstrom, Mandt
"Many modern unsupervised or semi-supervised machine learning algorithms rely on Bayesian probabilistic models. These models are usually intractable and thus require approximate inference. Variational inference (VI) lets us approximate a high-dimensional Bayesian posterior with a simpler variational distribution by solving an optimization problem. This approach has been successfully used in various models and large-scale applications. In this review, we give an overview of recent trends in variational inference. We first introduce standard mean field variational inference, then review recent advances focusing on the following aspects: (a) scalable VI, which includes stochastic approximations, (b) generic VI, which extends the applicability of VI to a large class of otherwise intractable models, such as non-conjugate models, (c) accurate VI, which includes variational models beyond the mean field approximation or with atypical divergences, and (d) amortized VI, which implements the inference over local latent variables with inference networks. Finally, we provide a summary of promising future research directions."
"Composing Graphical Models with Neural Networks for Structured Representations and Fast Inference" Johnson, Duvenaud, Wiltschko, Datta, Adams
"We propose a general modeling and inference framework that combines the complementary strengths of probabilistic graphical models and deep learning methods. Our model family composes latent graphical models with neural network observation likelihoods. For inference, we use recognition networks to produce local evidence potentials, then combine them with the model distribution using efficient message-passing algorithms. All components are trained simultaneously with a single stochastic variational inference objective. We illustrate this framework by automatically segmenting and categorizing mouse behavior from raw depth video, and demonstrate several other example models."
"Each frame of the video is a depth image of a mouse in a particular pose, and so even though each image is encoded as 30 × 30 = 900 pixels, the data lie near a low-dimensional nonlinear manifold. A good generative model must not only learn this manifold but also represent many other salient aspects of the data. For example, from one frame to the next the corresponding manifold points should be close to one another, and in fact the trajectory along the manifold may follow very structured dynamics. To inform the structure of these dynamics, a natural class of hypotheses used in ethology and neurobiology is that the mouse’s behavior is composed of brief, reused actions, such as darts, rears, and grooming bouts. Therefore a natural representation would include discrete states with each state representing the simple dynamics of a particular primitive action, a representation that would be difficult to encode in an unsupervised recurrent neural network model. These two tasks, of learning the image manifold and learning a structured dynamics model, are complementary: we want to learn the image manifold not just as a set but in terms of manifold coordinates in which the structured dynamics model fits the data well. A similar modeling challenge arises in speech, where high-dimensional data lie near a low-dimensional manifold because they are generated by a physical system with relatively few degrees of freedom but also include the discrete latent dynamical structure of phonemes, words, and grammar."
"Our approach uses graphical models for representing structured probability distributions, and uses ideas from variational autoencoders for learning not only the nonlinear feature manifold but also bottom-up recognition networks to improve inference. Thus our method enables the combination of flexible deep learning feature models with structured Bayesian and even Bayesian nonparametric priors. Our approach yields a single variational inference objective in which all components of the model are learned simultaneously. Furthermore, we develop a scalable fitting algorithm that combines several advances in efficient inference, including stochastic variational inference, graphical model message passing, and backpropagation with the reparameterization trick."
videohttps://youtube.com/watch?v=btr1poCYIzwvideohttps://youtube.com/watch?v=5RA-TMwdpbw (Johnson)videohttp://videolectures.net/deeplearning2017_johnson_graphical_models/ (Johnson)videohttps://youtube.com/watch?v=KcbfuUJ_a0A (Johnson)videohttps://youtube.com/watch?v=vnO3w8OgTE8 (Duvenaud)audiohttps://youtube.com/watch?v=P7zucOImw04 (Duvenaud)slideshttp://www.cs.toronto.edu/~duvenaud/courses/csc2541/slides/svae-slides.pdfnoteshttps://casmls.github.io/general/2016/12/11/SVAEandfLDS.htmlcodehttp://github.com/mattjj/svae
"One-Shot Generalization in Deep Generative Models" Rezende, Mohamed, Danihelka, Gregor, Wierstra
"Humans have an impressive ability to reason about new concepts and experiences from just a single example. In particular, humans have an ability for one-shot generalization: an ability to encounter a new concept, understand its structure, and then be able to generate compelling alternative variations of the concept. We develop machine learning systems with this important capacity by developing new deep generative models, models that combine the representational power of deep learning with the inferential power of Bayesian reasoning. We develop a class of sequential generative models that are built on the principles of feedback and attention. These two characteristics lead to generative models that are among the state-of-the art in density estimation and image generation. We demonstrate the one-shot generalization ability of our models using three tasks: unconditional sampling, generating new exemplars of a given concept, and generating new exemplars of a family of concepts. In all cases our models are able to generate compelling and diverse samples---having seen new examples just once---providing an important class of general-purpose models for one-shot machine learning."
videohttp://youtube.com/watch?v=TpmoQ_j3Jv4 (demo)videohttp://techtalks.tv/talks/one-shot-generalization-in-deep-generative-models/62365/videohttps://youtu.be/XpIDCzwNe78?t=43m (Bartunov)noteshttps://casmls.github.io/general/2017/02/08/oneshot.html
"Towards a Neural Statistician" Edwards, Storkey
"An efficient learner is one who reuses what they already know to tackle a new problem. For a machine learner, this means understanding the similarities amongst datasets. In order to do this, one must take seriously the idea of working with datasets, rather than datapoints, as the key objects to model. Towards this goal, we demonstrate an extension of a variational autoencoder that can learn a method for computing representations, or statistics, of datasets in an unsupervised fashion. The network is trained to produce statistics that encapsulate a generative model for each dataset. Hence the network enables efficient learning from new datasets for both unsupervised and supervised tasks. We show that we are able to learn statistics that can be used for: clustering datasets, transferring generative models to new datasets, selecting representative samples of datasets and classifying previously unseen classes."
"Our goal was to demonstrate that it is both possible and profitable to work at a level of abstraction of datasets rather than just datapoints. We have shown how it is possible to learn to represent datasets using a statistic network, and that these statistics enable highly flexible and efficient models that can do transfer learning, small shot classification, cluster distributions, summarize datasets and more. Avenues for future research are engineering, methodological and application based. In terms of engineering we believe that there are gains to be had by more thorough exploration of different (larger) architectures. In terms of methodology we want to look at: improved methods of representing uncertainty resulting from sample size; models explicitly designed trained for small-shot classification; supervised and semi-supervised approaches to classifiying either datasets or datapoints within the dataset. One advantage we have yet to explore is that by specifying classes implicitly in terms of sets, we can combine multiple data sources with potentially different labels, or multiple labels. We can also easily train on any unlabelled data because this corresponds to sets of size one. We also want to consider questions such as: What are desirable properties for statistics to have as representations? How can we enforce these? Can we use ideas from classical work on estimators? In terms of applications we are interested in applying this framework to learning embeddings of speakers for speech problems or customer embeddings in commercial problems."
"Potentially a more powerful alternative to Variational Autoencoder."
videohttp://techtalks.tv/talks/neural-statistician/63048/ (Edwards)videohttps://youtube.com/watch?v=29t1qc7IWro (Edwards)videohttps://youtu.be/XpIDCzwNe78?t=51m53s (Bartunov)noteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1606.02185
"Fast Epsilon-free Inference of Simulation Models with Bayesian Conditional Density Estimation" Papamakarios, Murray
"Many statistical models can be simulated forwards but have intractable likelihoods. Approximate Bayesian Computation (ABC) methods are used to infer properties of these models from data. Traditionally these methods approximate the posterior over parameters by conditioning on data being inside an Epsilon-ball around the observed data, which is only correct in the limit Epsilon→ 0. Monte Carlo methods can then draw samples from the approximate posterior to approximate predictions or error bars on parameters. These algorithms critically slow down as Epsilon→ 0, and in practice draw samples from a broader distribution than the posterior. We propose a new approach to likelihood-free inference based on Bayesian conditional density estimation. Preliminary inferences based on limited simulation data are used to guide later simulations. In some cases, learning an accurate parametric representation of the entire true posterior distribution requires fewer model simulations than Monte Carlo ABC methods need to produce a single sample from an approximate posterior."
"Conventional ABC algorithms such as the above suffer from three drawbacks. First, they only represent the parameter posterior as a set of (possibly weighted or correlated) samples. A sample-based representation easily gives estimates and error bars of individual parameters, and model predictions. However these computations are noisy, and it is not obvious how to perform some other computations using samples, such as combining posteriors from two separate analyses. Second, the parameter samples do not come from the correct Bayesian posterior, but from an approximation based on assuming a pseudo-observation that the data is within an Epsilon-ball centred on the data actually observed. Third, as the Epsilon-tolerance is reduced, it can become impractical to simulate the model enough times to match the observed data even once. When simulations are expensive to perform, good quality inference becomes impractical. In this paper, we propose an alternative approach to likelihood-free inference, which unlike conventional ABC does not suffer from the above three issues. Instead of returning a set of parameter samples from an approximate posterior, our approach learns a parametric approximation to the exact posterior, which can be made as accurate as required. Furthermore, we present a strategy for learning our parametric approximation by making efficient use of simulations from the model. We show experimentally that our approach is capable of closely approximating the exact posterior, while making efficient use of simulations compared to conventional ABC. Our approach is based on conditional density estimation using Bayesian neural networks, and draws upon advances in density estimation, stochastic variational inference, and recognition networks. To the best of our knowledge, this is the first work that applies such techniques to the field of likelihood-free inference."
videohttps://youtube.com/watch?v=926yqLgoedU (Murray)posthttp://dennisprangle.github.io/research/2016/06/07/bayesian-inference-by-neural-networks + http://dennisprangle.github.io/research/2016/06/07/bayesian-inference-by-neural-networks2codehttps://github.com/gpapamak/epsilon_free_inference
"Black-Box α-Divergence Minimization" Hernandez-Lobato, Li, Rowland, Hernandez-Lobato, Bui, Turner
"Black-box alpha is a new approximate inference method based on the minimization of α-divergences. BB-α scales to large datasets because it can be implemented using stochastic gradient descent. BB-α can be applied to complex probabilistic models with little effort since it only requires as input the likelihood function and its gradients. These gradients can be easily obtained using automatic differentiation. By changing the divergence parameter α, the method is able to interpolate between variational Bayes (VB) (α→ 0) and an algorithm similar to expectation propagation (EP) (α= 1). Experiments on probit regression and neural network regression and classification problems show that BB-α with non-standard settings of α, such as α= 0.5, usually produces better predictions than with α→ 0 (VB) or α= 1 (EP)." "We have proposed BB-α as a black-box inference algorithm to approximate power EP. This is done by considering the energy function used by power EP and constraining the form of the site approximations in this method. The proposed method locally minimizes the α-divergence that is a rich family of divergence measures between distributions including the Kullback-Leibler divergence. Such a method is guaranteed to converge under certain conditions, and can be implemented by optimizing an energy function without having to use inefficient double-loop algorithms. Scalability to large datasets can be achieved by using stochastic gradient descent with minibatches. Furthermore, a combination of a Monte Carlo approximation and automatic differentiation methods allows our technique to be applied in a straightforward manner to a wide range ofprobabilistic models with complex likelihood factors. Experiments with neural networks applied to small and large datasets demonstrate both the accuracy and the scalability of the proposed approach. The evaluations also indicate the optimal setting for α may vary for different tasks."
videohttp://techtalks.tv/talks/black-box-alpha-divergence-minimization/62506/ (Hernandez-Lobato)videohttps://youtube.com/watch?v=Ev-6s8b3QrI (Hernandez-Lobato)
"Variational Inference with Normalizing Flows" Rezende, Mohamed
"The choice of approximate posterior distribution is one of the core problems in variational inference. Most applications of variational inference employ simple families of posterior approximations in order to allow for efficient inference, focusing on mean-field or other simple structured approximations. This restriction has a significant impact on the quality of inferences made using variational methods. We introduce a new approach for specifying flexible, arbitrarily complex and scalable approximate posterior distributions. Our approximations are distributions constructed through a normalizing flow, whereby a simple initial density is transformed into a more complex one by applying a sequence of invertible transformations until a desired level of complexity is attained. We use this view of normalizing flows to develop categories of finite and infinitesimal flows and provide a unified view of approaches for constructing rich posterior approximations. We demonstrate that the theoretical advantages of having posteriors that better match the true posterior, combined with the scalability of amortized variational approaches, provides a clear improvement in performance and applicability of variational inference."
"We propose the specification of approximate posterior distributions using normalizing flows, a tool for constructing complex distributions by transforming a probability density through a series of invertible mappings. Inference with normalizing flows provides a tighter, modified variational lower bound with additional terms that only add terms with linear time complexity. We show that normalizing flows admit infinitesimal flows that allow us to specify a class of posterior approximations that in the asymptotic regime is able to recover the true posterior distribution, overcoming one oft-quoted limitation of variational inference. We present a unified view of related approaches for improved posterior approximation as the application of special types of normalizing flows. We show experimentally that the use of general normalizing flows systematically outperforms other competing approaches for posterior approximation."
"In this work we developed a simple approach for learning highly non-Gaussian posterior densities by learning transformations of simple densities to more complex ones through a normalizing flow. When combined with an amortized approach for variational inference using inference networks and efficient Monte Carlo gradient estimation, we are able to show clear improvements over simple approximations on different problems. Using this view of normalizing flows, we are able to provide a unified perspective of other closely related methods for flexible posterior estimation that points to a wide spectrum of approaches for designing more powerful posterior approximations with different statistical and computational tradeoffs. An important conclusion from the discussion in section 3 is that there exist classes of normalizing flows that allow us to create extremely rich posterior approximations for variational inference. With normalizing flows, we are able to show that in the asymptotic regime, the space of solutions is rich enough to contain the true posterior distribution. If we combine this with the local convergence and consistency results for maximum likelihood parameter estimation in certain classes of latent variables models, we see that we are now able overcome the objections to using variational inference as a competitive and default approach for statistical inference. Making such statements rigorous is an important line of future research. Normalizing flows allow us to control the complexity of the posterior at run-time by simply increasing the flow length of the sequence. The approach we presented considered normalizing flows based on simple transformations of the form (10) and (14). These are just two of the many maps that can be used, and alternative transforms can be designed for posterior approximations that may require other constraints, e.g., a restricted support. An important avenue of future research lies in describing the classes of transformations that allow for different characteristics of the posterior and that still allow for efficient, linear-time computation."
videohttps://facebook.com/uclcsml/videos/3027632833943878?t=983 (Mohamed)videohttps://channel9.msdn.com/Events/Neural-Information-Processing-Systems-Conference/Neural-Information-Processing-Systems-Conference-NIPS-2016/Variational-Inference-Foundations-and-Modern-Methods (1:05:06) (Mohamed)videohttps://youtu.be/JrO5fSskISY?t=1h2m19s (Mohamed)videohttps://cds.cern.ch/record/2302480 (38:20) (Rezende)videohttps://youtu.be/tqGEX_Ucu04?t=33m58s (Molchanov)in russianposthttps://casmls.github.io/general/2016/09/25/normalizing-flows.htmlposthttp://docs.pymc.io/notebooks/normalizing_flows_overview.htmlposthttp://blog.evjang.com/2018/01/nf1.htmlposthttp://akosiorek.github.io/ml/2018/04/03/norm_flows.htmlposthttps://ferrine.github.io/blog/2017/07/11/normalizing-flows-overviewnoteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1505.05770codehttps://github.com/pymc-devs/pymc3/blob/master/pymc3/variational/flows.py
"Probabilistic Backpropagation for Scalable Learning of Bayesian Neural Networks" Hernandez-Lobato, Adams
Expectation Propagation
"Large multilayer neural networks trained with backpropagation have recently achieved state-of-the-art results in a wide range of problems. However, using backprop for neural net learning still has some disadvantages, e.g., having to tune a large number of hyperparameters to the data, lack of calibrated probabilistic predictions, and a tendency to overfit the training data. In principle, the Bayesian approach to learning neural networks does not have these problems. However, existing Bayesian techniques lack scalability to large dataset and network sizes. In this work we present a novel scalable method for learning Bayesian neural networks, called probabilistic backpropagation. Similar to classical backpropagation, PBP works by computing a forward propagation of probabilities through the network and then doing a backward computation of gradients. A series of experiments on ten real-world datasets show that PBP is significantly faster than other techniques, while offering competitive predictive abilities. Our experiments also show that PBP provides accurate estimates of the posterior variance on the network weights."
videohttp://videolectures.net/icml2015_hernandez_lobato_bayesian_neural/ (Hernandez-Lobato)codehttps://github.com/HIPS/Probabilistic-Backpropagation
"Weight Uncertainty in Neural Networks" Blundell, Cornebise, Kavukcuoglu, Wierstra
Bayes by Backprop
"We introduce a new, efficient, principled and backpropagation-compatible algorithm for learning a probability distribution on the weights of a neural network, called Bayes by Backprop. It regularises the weights by minimising a compression cost, known as the variational free energy or the expected lower bound on the marginal likelihood. We show that this principled kind of regularisation yields comparable performance to dropout on MNIST classification. We then demonstrate how the learnt uncertainty in the weights can be used to improve generalisation in non-linear regression problems, and how this weight uncertainty can be used to drive the exploration-exploitation trade-off in reinforcement learning."
"Plain feedforward neural networks are prone to overfitting. When applied to supervised or reinforcement learning problems these networks are also often incapable of correctly assessing the uncertainty in the training data and so make overly confident decisions about the correct class, prediction or action. We shall address both of these concerns by using variational Bayesian learning to introduce uncertainty in the weights of the network. We call our algorithm Bayes by Backprop. We suggest at least three motivations for introducing uncertainty on the weights: 1) regularisation via a compression cost on the weights, 2) richer representations and predictions from cheap model averaging, and 3) exploration in simple reinforcement learning problems such as contextual bandits."
"Various regularisation schemes have been developed to prevent overfitting in neural networks such as early stopping, weight decay, and dropout. In this work, we introduce an efficient, principled algorithm for regularisation built upon Bayesian inference on the weights of the network. This leads to a simple approximate learning algorithm similar to backpropagation. We shall demonstrate how this uncertainty can improve predictive performance in regression problems by expressing uncertainty in regions with little or no data, how this uncertainty can lead to more systematic exploration than epsilon-greedy in contextual bandit tasks."
"All weights in our neural networks are represented by probability distributions over possible values, rather than having a single fixed value. Learnt representations and computations must therefore be robust under perturbation of the weights, but the amount of perturbation each weight exhibits is also learnt in a way that coherently explains variability in the training data. Thus instead of training a single network, the proposed method trains an ensemble of networks, where each network has its weights drawn from a shared, learnt probability distribution. Unlike other ensemble methods, our method typically only doubles the number of parameters yet trains an infinite ensemble using unbiased Monte Carlo estimates of the gradients."
"In general, exact Bayesian inference on the weights of a neural network is intractable as the number of parameters is very large and the functional form of a neural network does not lend itself to exact integration. Instead we take a variational approximation to exact Bayesian updates.""
"Uncertainty in the hidden units allows the expression of uncertainty about a particular observation, uncertainty in the weights is complementary in that it captures uncertainty about which neural network is appropriate, leading to regularisation of the weights and model averaging. This uncertainty can be used to drive exploration in contextual bandit problems using Thompson sampling Weights with greater uncertainty introduce more variability into the decisions made by the network, leading naturally to exploration. As more data are observed, the uncertainty can decrease, allowing the decisions made by the network to become more deterministic as the environment is better understood."
"We introduced a new algorithm for learning neural networks with uncertainty on the weights called Bayes by Backprop. It optimises a well-defined objective function to learn a distribution on the weights of a neural network. The algorithm achieves good results in several domains. When classifying MNIST digits, performance from Bayes by Backprop is comparable to that of dropout. We demonstrated on a simple non-linear regression problem that the uncertainty introduced allows the network to make more reasonable predictions about unseen data. Finally, for contextual bandits, we showed how Bayes by Backprop can automatically learn how to trade-off exploration and exploitation. Since Bayes by Backprop simply uses gradient updates, it can readily be scaled using multi-machine optimisation schemes such as asynchronous SGD."
videohttp://videolectures.net/icml2015_blundell_neural_network/ (Blundell)codehttps://github.com/tabacof/bayesian-nn-uncertaintycodehttps://github.com/blei-lab/edward/blob/master/examples/bayesian_nn.pycodehttps://github.com/ferrine/gelatocodehttps://gist.github.com/rocknrollnerd/c5af642cf217971d93f499e8f70fcb72
"Bayesian Dark Knowledge" Korattikara, Rathod, Murphy, Welling
"We consider the problem of Bayesian parameter estimation for deep neural networks, which is important in problem settings where we may have little data, and/or where we need accurate posterior predictive densities, e.g., for applications involving bandits or active learning. One simple approach to this is to use online Monte Carlo methods, such as SGLD (stochastic gradient Langevin dynamics). Unfortunately, such a method needs to store many copies of the parameters (which wastes memory), and needs to make predictions using many versions of the model (which wastes time). We describe a method for "distilling" a Monte Carlo approximation to the posterior predictive density into a more compact form, namely a single deep neural network. We compare to two very recent approaches to Bayesian neural networks, namely an approach based on expectation propagation [Hernandez-Lobato and Adams, 2015] and an approach based on variational Bayes [Blundell et al., 2015]. Our method performs better than both of these, is much simpler to implement, and uses less computation at test time."
videohttps://youtu.be/tqGEX_Ucu04?t=1h1m23s (Molchanov)in russian
"Dropout as a Bayesian Approximation: Representing Model Uncertainty in Deep Learning" Gal, Ghahramani
"Deep learning has gained tremendous attention in applied machine learning. However such tools for regression and classification do not capture model uncertainty. Bayesian models offer a mathematically grounded framework to reason about model uncertainty, but usually come with a prohibitive computational cost. We show that dropout in neural networks can be cast as a Bayesian approximation. As a direct result we obtain tools to model uncertainty with dropout NNs - extracting information from existing models that has been thrown away so far. This mitigates the problem of representing uncertainty in deep learning without sacrificing computational complexity or test accuracy. We perform an extensive study of the dropout uncertainty properties. Various network architectures and non-linearities are assessed on tasks of regression and classification, using MNIST as an example. We show a considerable improvement in predictive log-likelihood and RMSE compared to existing state-of-the-art methods. We finish by using dropout uncertainty in a Bayesian pipeline, with deep reinforcement learning as a practical task."
"We have built a probabilistic interpretation of dropout which allowed us to obtain model uncertainty out of existing deep learning models. We have studied the properties of this uncertainty in detail, and demonstrated possible applications, interleaving Bayesian models and deep learning models together. This extends on initial research studying dropout from the Bayesian perspective. Bernoulli dropout is only one example of a regularisation technique corresponding to an approximate variational distribution which results in uncertainty estimates. Other variants of dropout follow our interpretation as well and correspond to alternative approximating distributions. These would result in different uncertainty estimates, trading-off uncertainty quality with computational complexity. We explore these in follow-up work. Furthermore, each GP covariance function has a one-to-one correspondence with the combination of both NN non-linearities and weight regularisation. This suggests techniques to select appropriate NN structure and regularisation based on our a-priori assumptions about the data. For example, if one expects the function to be smooth and the uncertainty to increase far from the data, cosine nonlinearities and L2 regularisation might be appropriate. The study of non-linearity–regularisation combinations and the corresponding predictive mean and variance are subject of current research."
"Deep learning has attracted tremendous attention from researchers in fields such as physics, biology, and manufacturing, to name a few. Tools such as the neural network, dropout, convolutional neural networks, and others are used extensively. However, these are fields in which representing model uncertainty is of crucial importance. With the recent shift in many of these fields towards the use of Bayesian uncertainty new needs arise from deep learning tools. Standard deep learning tools for regression and classification do not capture model uncertainty. In classification, predictive probabilities obtained at the end of the pipeline (the softmax output) are often erroneously interpreted as model confidence. A model can be uncertain in its predictions even with a high softmax output. Passing a point estimate of a function through a softmax results in extrapolations with unjustified high confidence for points far from the training data. However, passing the distribution through a softmax better reflects classification uncertainty far from the training data. Model uncertainty is indispensable for the deep learning practitioner as well. With model confidence at hand we can treat uncertain inputs and special cases explicitly. For example, in the case of classification, a model might return a result with high uncertainty. In this case we might decide to pass the input to a human for classification. This can happen in a post office, sorting letters according to their zip code, or in a nuclear power plant with a system responsible for critical infrastructure. Uncertainty is important in reinforcement learning as well. With uncertainty information an agent can decide when to exploit and when to explore its environment. Recent advances in RL have made use of NNs for Q-value function approximation. These are functions that estimate the quality of different actions an agent can make. Epsilon greedy search is often used where the agent selects its best action with some probability and explores otherwise. With uncertainty estimates over the agent’s Q-value function, techniques such as Thompson sampling can be used to learn much faster."
"Bayesian probability theory offers us mathematically grounded tools to reason about model uncertainty, but these usually come with a prohibitive computational cost. It is perhaps surprising then that it is possible to cast recent deep learning tools as Bayesian models – without changing either the models or the optimisation. We show that the use of dropout (and its variants) in NNs can be interpreted as a Bayesian approximation of a well known probabilistic model: the Gaussian process. Dropout is used in many models in deep learning as a way to avoid over-fitting, and our interpretation suggests that dropout approximately integrates over the models’ weights. We develop tools for representing model uncertainty of existing dropout NNs – extracting information that has been thrown away so far. This mitigates the problem of representing model uncertainty in deep learning without sacrificing either computational complexity or test accuracy. In this paper we give a complete theoretical treatment of the link between Gaussian processes and dropout, and develop the tools necessary to represent uncertainty in deep learning. We perform an extensive exploratory assessment of the properties of the uncertainty obtained from dropout NNs and convnets on the tasks of regression and classification. We compare the uncertainty obtained from different model architectures and non-linearities in regression, and show that model uncertainty is indispensable for classification tasks, using MNIST as a concrete example. We then show a considerable improvement in predictive log-likelihood and RMSE compared to existing state-ofthe-art methods. Lastly we give a quantitative assessment of model uncertainty in the setting of reinforcement learning, on a practical task similar to that used in deep reinforcement learning."
"It has long been known that infinitely wide (single hidden layer) NNs with distributions placed over their weights converge to Gaussian processes. This known relation is through a limit argument that does not allow us to translate properties from the Gaussian process to finite NNs easily. Finite NNs with distributions placed over the weights have been studied extensively as Bayesian neural networks. These offer robustness to over-fitting as well, but with challenging inference and additional computational costs. Variational inference has been applied to these models, but with limited success. Recent advances in variational inference introduced new techniques into the field such as sampling-based variational inference and stochastic variational inference. These have been used to obtain new approximations for Bayesian neural networks that perform as well as dropout. However these models come with a prohibitive computational cost. To represent uncertainty, the number of parameters in these models is doubled for the same network size. Further, they require more time to converge and do not improve on existing techniques. Given that good uncertainty estimates can be cheaply obtained from common dropout models, this results in unnecessary additional computation. An alternative approach to variational inference makes use of expectation propagation and has improved considerably in RMSE and uncertainty estimation on VI approaches. In the results section we compare dropout to these approaches and show a significant improvement in both RMSE and uncertainty estimation."
"The main result of this paper is that neural network with arbitrary depth and non-linearities, with dropout applied before every weight layer, is mathematically equivalent to variational approximation of Gaussian process with a particular choice of covariance function. This interpretation might offer an explanation to some of dropout's key properties, such as its robustness to over-fitting. Our interpretation allows us to reason about uncertainty in deep learning, and allows the introduction of the Bayesian machinery into existing deep learning frameworks in a principled way."
"Dropout can be interpreted as a variational Bayesian approximation, where the approximating distribution is a mixture of two Gaussians with small variances and the mean of one of the Gaussians fixed at zero. The uncertainty in the weights induces prediction uncertainty by marginalising over the approximate posterior using Monte Carlo integration. This amounts to the regular dropout procedure only with dropout also applied at test time, giving output uncertainty from our dynamics model."
videohttp://research.microsoft.com/apps/video/default.aspx?id=259218 (Gal)videohttp://techtalks.tv/talks/dropout-as-a-bayesian-approximation-representing-model-uncertainty-in-deep-learning/62508/ (Gal)videohttps://youtube.com/watch?v=I09QVNrUS3Q (Rowan)videohttps://youtu.be/tqGEX_Ucu04?t=12m43s (Molchanov)in russianposthttp://mlg.eng.cam.ac.uk/yarin/blog_3d801aa532c1ce.html (Gal)posthttp://mlg.eng.cam.ac.uk/yarin/blog_2248.html (Gal)post"Demos demonstrating the difference between homoscedastic and heteroscedastic regression with dropout uncertainty" (Gal)posthttp://www.computervisionblog.com/2016/06/making-deep-networks-probabilistic-via.htmlnoteshttps://casmls.github.io/general/2016/11/11/dropout.htmlnoteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/GalG15codehttps://github.com/yaringal/DropoutUncertaintyExpscodehttps://github.com/tabacof/bayesian-nn-uncertaintycodehttp://nbviewer.jupyter.org/github/napsternxg/pytorch-practice/blob/master/Pytorch%20Uncertainity-animated.ipynbpaper"Dropout as a Bayesian Approximation: Appendix" by Gal and Ghahramanipaper"Uncertainty in Deep Learning" by Yarin Gal
"A long strand of empirical research has claimed that dropout cannot be applied between the recurrent connections of a recurrent neural network. The reasoning has been that the noise hinders the network’s ability to model sequences, and instead should be applied to the RNN’s inputs and outputs alone. But dropout is a vital tool for regularisation, and without dropout in recurrent layers our models overfit quickly. In this paper we show that a recently developed theoretical framework, casting dropout as approximate Bayesian inference, can give us mathematically grounded tools to apply dropout within the recurrent layers. We apply our new dropout technique in long short-term memory networks and show that the new approach significantly outperforms existing techniques."
"We’ve seen how theoretical developments can lead to new tools within deep learning, solving a major difficulty with existing sequence models. Compared to existing pragmatic approaches in the field, where empirical experimentation with various tools might lead to new findings, we developed a theory trying to understand why existing tools work so well. In an attempt to validate the theory we made predictions (in the scientific sense) which we attempted to validate or disprove."
"Following recent theoretical results we propose a new approach that can be applied to the recurrent connections successfully. This allows us to train RNNs on much smaller data, data which is often believed to lie in the Bayesian realm."
"Many stochastic training techniques in deep learning, developed as means of regularisation, have recently been shown to follow the same mathematical foundations as approximate inference in Bayesian neural networks. Dropout, for example, is equivalent to approximate variational inference with Bernoulli variational distributions."
"We introduce the Bayesian RNN - an RNN with weights treated as random variables. Approximating the posterior distribution over the weights with a Bernoulli approximating variational distributions reveals how dropout should be applied in RNNs. More specifically, the random weights when conditioned on some observations have a posterior. This posterior is approximated with a Bernoulli approximating distribution. Implementing this approximate inference procedure is identical to repeating the same dropout mask throughout the sequence. When used with discrete inputs (i.e. words) we place a distribution over the word embeddings as well - resulting in a fully Bayesian model. This corresponds to randomly dropping words in the sentence, and might be interpreted as forcing the model not to rely on single words for its task."
videohttps://youtu.be/tqGEX_Ucu04?t=19m1s (Molchanov)in russiancodehttps://github.com/yaringal/BayesianRNN
"In this paper we investigate several popular approaches for uncertainty estimation in neural networks. We find that several popular approximations to the uncertainty of a unknown neural net model are in fact approximations to the risk given a fixed model. We review that conflating risk with uncertainty can lead to arbitrarily poor performance in a sequential decision problem. We present a simple and practical solution to this problem based upon smoothed bootstrap sampling."
"In sequential decision problems there is an important distinction between risk and uncertainty. We identify risk as inherent stochasticity in a model and uncertainty as the confusion over which model parameters apply. For example, a coin may have a fixed p = 0.5 of heads and so the outcome of any single flip holds some risk; a learning agent may also be uncertain of p. The demarcation between risk and uncertainty is tied to the specific model class, in this case a Bernoulli random variable; with a more detailed model of flip dynamics even the outcome of a coin may not be risky at all. Our distinction is that unlike risk, uncertainty captures the variability of an agent’s posterior belief which can be resolved through statistical analysis of the appropriate data. For a learning agent looking to maximize cumulative utility through time, this distinction represents a crucial dichotomy. Consider the reinforcement learning problem of an agent interacting with its environment while trying to maximize cumulative utility through time. At each timestep, the agent faces a fundamental tradeoff: by exploring uncertain states and actions the agent can learn to improve its future performance, but it may attain better short-run performance by exploiting its existing knowledge. At a high level this effect means uncertain states are more attractive since they can provide important information to the agent going forward. On the other hand, states and actions with high risk are actually less attractive for an agent in both exploration and exploitation. For exploitation, any concave utility will naturally penalize risk. For exploration, risk also makes any single observation less informative. Although colloquially similar, risk and uncertainty can require radically different treatment."
"One of the most popular recent suggestions has been to use dropout sampling (where individual neurons are independently set to zero with probability p) to “get uncertainty information from these deep learning models for free – without changing a thing”. Unfortunately, as we now show, dropout sampling can be better thought of as an approximation to the risk in y, rather than the uncertainty of the learned model. Further, using a fixed dropout rate p, rather than optimizing this variational parameter can lead an arbitrarily bad approximation to the risk."
"The resulting “dropout posterior” can have arbitrarily small or large variance depending on the interaction between the dropout rate p and the model size K".
"We extend the analysis to linear functions and argue that this behavior also carries over to deep learning; extensive computational results support this claim. We investigate the importance of risk and uncertainty in sequential decision problems and why this setting is crucially distinct from standard supervised learning tasks. We highlight the dangers of a naive applications of dropout (or any other approximate risk measure) as a proxy for uncertainty."
"We present analytical regret bounds for algorithms based upon smoothed bootstrapped uncertainty estimates that complement their strong performance in complex nonlinear domains."
Yarin Gal:
"One technique to estimate model uncertainty uses an ensemble of deterministic models, meaning that each model in the ensemble produces a point estimate rather than a distribution. It works by independently training many randomly initialised instances of a model on the same dataset (or different random subsets in the case of bootstrapping), and given an input test point, evaluating the sample variance of the outputs from all deterministic models. Even though this approach is more computationally efficient than many Bayesian approaches to model uncertainty (apart from the need to represent the parameters of multiple models), its produced uncertainty estimates lack in many ways as explained in the next illustrative example. To see this, let’s see what would happen if each deterministic model were to be given by an RBF network (whose predictions coincide with the predictive mean of a Gaussian process with a squared-exponential covariance function). An RBF network predicts zero for test points far from the training data. This means that in an ensemble of RBF networks, each and every network will predict zero for a given test point far from the training data. As a result, the sample variance of this technique will be zero at the given test point. The ensemble of models will have very high confidence in its prediction of zero even though the test point lies far from the data! This limitation can be alleviated by using an ensemble of probabilistic models instead of deterministic models. Even though the RBF network’s predictions coincide with the predictive mean of the SE Gaussian process, by using a Gaussian process we could also make use of its predictive variance. The Gaussian process predictions far from the training data will have large model uncertainty. In the ensemble, we would thus wish to take into account each model’s confidence as well as its mean (by sampling an output from each model’s predictive distribution before calculating our sample variance)."
Ian Osband:
"- There is a difference between the posterior distribution for an outcome, and your posterior distribution for what you think is the mean of an outcome.
- Both of these can be very useful, but since these distributions can be very different you need to pick which type you are approximating. If you want to do Thompson sampling for exploration you should sample over the right thing.
- Something feels a strange about a Bayesian posterior that doesn't concentrate with more data."
"Variational Dropout and the Local Reparameterization Trick" Kingma, Salimans, Welling
"We investigate a local reparameterizaton technique for greatly reducing the variance of stochastic gradients for variational Bayesian inference (SGVB) of a posterior over model parameters, while retaining parallelizability. This local reparameterization translates uncertainty about global parameters into local noise that is independent across datapoints in the minibatch. Such parameterizations can be trivially parallelized and have variance that is inversely proportional to the minibatch size, generally leading to much faster convergence. Additionally, we explore a connection with dropout: Gaussian dropout objectives correspond to SGVB with local reparameterization, a scale-invariant prior and proportionally fixed posterior variance. Our method allows inference of more flexibly parameterized posteriors; specifically, we propose variational dropout, a generalization of Gaussian dropout where the dropout rates are learned, often leading to better models. The method is demonstrated through several experiments."
noteshttp://www.shortscience.org/paper?bibtexKey=conf/nips/BlumHP15codehttps://github.com/kefirski/variational_dropoutpaper"Variational Gaussian Dropout is not Bayesian" by Hron, Matthews, Ghahramani
"Simple and Scalable Predictive Uncertainty Estimation using Deep Ensembles" Lakshminarayanan, Pritzel, Blundell
"Deep neural networks are powerful black box predictors that have recently achieved impressive performance on a wide spectrum of tasks. Quantifying predictive uncertainty in neural networks is a challenging and yet unsolved problem. Bayesian neural networks, which learn a distribution over weights, are currently the state-of-the-art for estimating predictive uncertainty; however these require significant modifications to the training procedure and are computationally expensive compared to standard (non-Bayesian) neural neural networks. We propose an alternative to Bayesian neural networks, that is simple to implement, readily parallelisable and yields high quality predictive uncertainty estimates. Through a series of experiments on classification and regression benchmarks, we demonstrate that our method produces well-calibrated uncertainty estimates which are as good or better than approximate Bayesian neural networks. To assess robustness to dataset shift, we evaluate the predictive uncertainty on test examples from known and unknown distributions, and show that our method is able to express higher uncertainty on unseen data. We demonstrate the scalability of our method by evaluating predictive uncertainty estimates on ImageNet."
"We have proposed a simple and scalable solution that provides a very strong baseline on evaluation metrics for uncertainty quantification. Our method uses scoring rules as training objectives to encourage the neural network to produce better calibrated predictions and uses a combination of ensembles and adversarial training for robustness to model misspecification and dataset shift. Our method is well suited for large scale distributed computation and can be readily implemented for a wide variety of architectures such as MLPs, CNNs, etc including those which do not use dropout (e.g. residual networks). It is perhaps surprising to the Bayesian deep learning community that a non-Bayesian (yet probabilistic) approach can perform as well as Bayesian neural networks. We hope that this work will encourage community to think about hybrid approaches (e.g. using non-Bayesian approaches such as ensembles) and other interesting metrics for evaluating predictive uncertainty."
"Adversarial Training to improve the uncertainty measure of the entropy score of the neural network."
"Good uncertainty estimate: calibration + higher uncertainty on out-of-distribution examples."
"Existing bayesian solutions (MCMC, VI, MC-Dropout) are hard to scale and requires significant modifications for training."
"Single network and MC-Dropout can produce overconfident wrong predictions, whereas deep ensembles are more robust."
videohttps://facebook.com/nipsfoundation/videos/1554654864625747?t=3623 (Lakshminarayanan)noteshttps://bayesgroup.github.io/sufficient-statistics/posts/simple-and-scalable-predictive-uncertainty-estimation-using-deep-ensembles/in russiancodehttps://github.com/axelbrando/Mixture-Density-Networks-for-distribution-and-uncertainty-estimation
"We reinterpret multiplicative noise in neural networks as auxiliary random variables that augment the approximate posterior in a variational setting for Bayesian neural networks. We show that through this interpretation it is both efficient and straightforward to improve the approximation by employing normalizing flows (Rezende & Mohamed, 2015) while still allowing for local reparametrizations (Kingma et al., 2015) and a tractable lower bound (Ranganath et al., 2015; Maaløe et al., 2016). In experiments we show that with this new approximation we can significantly improve upon classical mean field for Bayesian neural networks on both predictive accuracy as well as predictive uncertainty."
"We compared our uncer-tainty on notMNIST and CIFAR with Dropout (Srivastavaet al., 2014; Gal & Ghahramani, 2015b) and Deep Ensembles (Lakshminarayanan et al., 2016) using convolutional architectures and found that MNFs achieve more realistic uncertainties while providing predictive capabilities on par with Dropout. We suspect that the predictive capabilities of MNFs can be further improved through more appropriate optimizers that avoid the bad local minima in the variational objective. Finally, we also highlighted limitations of Dropout approximations and empirically showed that MNFs can overcome them."
"Another promising direction is that of designing better priors for Bayesian neural networks. For example (Neal, 1995) has identified limitations of Gaussian priors and proposes alternative priors such as the Cauchy. Furthermore, the prior over the parameters also affects the type of uncertainty we get in our predictions; for instance we observed in our experiments a significant difference in uncertainty between Gaussian and log-uniform priors. Since different problems require different types of uncertainty it makes sense to choose the prior accordingly, e.g. use an informative prior so as to alleviate adversarial examples."
videohttps://youtu.be/tqGEX_Ucu04?t=39m23s (Molchanov)in russian
interesting papers - self-supervised learning interesting papers - generative adversarial networks interesting papers - variational autoencoder interesting papers - autoregressive models interesting papers - flow models
"Making the World Differentiable: On Using Self-Supervised Fully Recurrent Neural Networks for Dynamic Reinforcement Learning and Planning in Non-Stationary Environments" Schmidhuber
1990
"Efficient Estimation of Word Representations in Vector Space" Mikolov, Chen, Corrado, Dean
word2vec Skip-gram
"We propose two novel model architectures for computing continuous vector representations of words from very large data sets. The quality of these representations is measured in a word similarity task, and the results are compared to the previously best performing techniques based on different types of neural networks. We observe large improvements in accuracy at much lower computational cost, i.e. it takes less than a day to learn high quality word vectors from a 1.6 billion words data set. Furthermore, we show that these vectors provide state-of-the-art performance on our test set for measuring syntactic and semantic word similarities."
videohttps://youtube.com/watch?v=BnpB3GrpsfM (Radford)videohttps://youtu.be/dMUes74-nYY?t=1h3m (Srinivas)videohttps://youtube.com/watch?v=yexR53My2O4 (Kilcher)videohttps://youtube.com/watch?v=Ab5cgv9w7ac (Scarfe)videohttps://youtube.com/watch?v=cQFOxMkzwf4 (Shorten)videohttps://youtube.com/watch?v=c3yRH0XZN2g (Boyd-Graber)videohttps://youtube.com/watch?v=fwcJpSYNsNs (Mikolov)noteshttp://www.shortscience.org/paper?bibtexKey=mikolov2013efficientposthttp://jalammar.github.io/illustrated-word2vecposthttp://alexminnaar.com/word2vec-tutorial-part-i-the-skip-gram-model.htmlposthttp://alexminnaar.com/word2vec-tutorial-part-ii-the-continuous-bag-of-words-model.htmlpaper"word2vec Parameter Learning Explained" by Rong
"BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding" Devlin, Chang, Lee, Toutanova
BERT representation learning
"We introduce a new language representation model called BERT, which stands for Bidirectional Encoder Representations from Transformers. Unlike recent language representation models, BERT is designed to pre-train deep bidirectional representations from unlabeled text by jointly conditioning on both left and right context in all layers. As a result, the pre-trained BERT model can be fine-tuned with just one additional output layer to create state-of-the-art models for a wide range of tasks, such as question answering and language inference, without substantial task-specific architecture modifications. BERT is conceptually simple and empirically powerful. It obtains new state-of-the-art results on eleven natural language processing tasks, including pushing the GLUE score to 80.5% (7.7% point absolute improvement), MultiNLI accuracy to 86.7% (4.6% absolute improvement), SQuAD v1.1 question answering Test F1 to 93.2 (1.5 point absolute improvement) and SQuAD v2.0 Test F1 to 83.1 (5.1 point absolute improvement)."
"Unlike recent language representation models (Peters et al., 2018; Radford et al., 2018), BERT is designed to pre-train deep bidirectional representations by jointly conditioning on both left and right context in all layers. As a result, the pre-trained BERT representations can be fine-tuned with just one additional output layer to create state-of-the-art models for a wide range of tasks, such as question answering and language inference, without substantial task-specific architecture modifications."
posthttps://ai.googleblog.com/2018/11/open-sourcing-bert-state-of-art-pre.htmlvideohttps://youtube.com/watch?v=knTc-NQSjKA (Devlin)videohttps://youtube.com/watch?v=BWP3DyJ6k3g (Chang)videohttps://youtube.com/watch?v=OR0wfP2FD3c (Shorten)videohttps://youtube.com/watch?v=-9evrZnBorM (Kilcher)videohttps://youtu.be/DSYzHPW26Ig?t=1h15m40s (Graves)videohttps://youtu.be/AC4l_MY2Dhc?t=1h51m52s (Srinivas)videohttps://youtu.be/BnpB3GrpsfM?t=1h32m23s (Radford)videohttps://youtu.be/8zAP2qWAsKg?t=55m7s (Hill)videohttps://youtube.com/watch?v=_BFp4kjSB-I (Raschka)videohttps://youtube.com/watch?v=9-Om2YcHhIA (Li)videohttps://youtube.com/watch?v=BhlOGGzC0Q0 + https://youtube.com/watch?v=rMQMHA-uv_E (Gharbieh)videohttps://youtube.com/watch?v=BhlOGGzC0Q0 (Luo)videohttps://youtu.be/0rZBf5Hrsz0?t=1h18m11s + https://youtu.be/0h5RlFQUwAY?t=50m (Grabovoy)in russianvideohttps://youtu.be/JO-RJRCkLvM?t=23m12s + https://youtube.com/watch?v=5o8gTP-7xwg (Lobacheva)in russianvideohttps://youtu.be/99CymZY-4Tc?t=5m36s (Lyalin)in russianvideohttps://youtu.be/atSqU9HfJq0?t=1h9m13s (Malykh)in russianvideohttps://youtu.be/Q4HVS6c92qU?t=21m7s (Alexeev)in russianvideohttps://youtu.be/1DygevyV2eA?t=17m27s (Neychev)in russianvideohttps://youtu.be/zhsUpUFClEU?t=32m16s (Astakhov)in russianposthttp://jalammar.github.io/illustrated-bertposthttps://medium.com/dissecting-bert/dissecting-bert-part-1-d3c3d495cdb3 + https://medium.com/dissecting-bert/dissecting-bert-part2-335ff2ed9c73 + https://medium.com/dissecting-bert/dissecting-bert-appendix-the-decoder-3b86f66b0e5fpaper"Right for the Wrong Reasons: Diagnosing Syntactic Heuristics in Natural Language Inference" by McCoy et al.paper"Probing Neural Network Comprehension of Natural Language Arguments" by Niven et al. (post by Benjamin Heinzerling)paper"BERT Rediscovers the Classical NLP Pipeline" by Tenney et al.paper"A Primer in BERTology: What We Know About How BERT Works" by Rogers et al.
"Language Models are Unsupervised Multitask Learners" Radford, Wu, Child, Luan, Amodei, Sutskever
GPT-2 language modeling
"Natural language processing tasks, such as question answering, machine translation, reading comprehension, and summarization, are typically approached with supervised learning on task-specific datasets. We demonstrate that language models begin to learn these tasks without any explicit supervision when trained on a new dataset of millions of webpages called WebText. When conditioned on a document plus questions, the answers generated by the language model reach 55 F1 on the CoQA dataset - matching or exceeding the performance of 3 out of 4 baseline systems without using the 127,000+ training examples. The capacity of the language model is essential to the success of zero-shot task transfer and increasing it improves performance in a log-linear fashion across tasks. Our largest model, GPT-2, is a 1.5B parameter Transformer that achieves state of the art results on 7 out of 8 tested language modeling datasets in a zero-shot setting but still underfits WebText."
demohttps://talktotransformer.composthttps://openai.com/blog/better-language-modelsposthttps://openai.com/blog/language-unsupervised (GPT-1)videohttps://youtu.be/BnpB3GrpsfM?t=1h55m8s (Radford)videohttps://youtu.be/BnpB3GrpsfM?t=1h26m40s (Radford) (GPT-1)videohttps://youtube.com/watch?v=UULqu7LQoHs (Shorten)videohttps://youtube.com/watch?v=9ebPNEHRwXU (Shorten) (GPT-1)videohttps://youtube.com/watch?v=u1_qMdb0kYU (Kilcher)videohttps://youtu.be/w3ues-NayAs?t=23m15s (Sutskever)videohttps://youtu.be/X-B3nAN7YRM?t=14m25s (Sutskever)videohttps://youtu.be/T0I88NhR_9M?t=6m11s (Sutskever)videohttps://youtube.com/watch?v=BXv1m9Asl7I (Raschka)videohttps://youtube.com/watch?v=n_UlVuFAzbU (Amjadian)videohttps://youtu.be/qIEfJ6OBGj8?t=14m25s (Hinton)posthttps://amaarora.github.io/2020/02/18/annotatedGPT2.htmlposthttps://jalammar.github.io/illustrated-gpt2posthttps://gwern.net/GPT-2paper"Generative Pretraining from Pixels" by Chen et al.IMAGE GPT(post, overview (Chen)video, overview (Kilcher)video, overview (Shorten)video)
"Language Models are Few-Shot Learners" Brown et al.
GPT-3 language modeling meta-learning
"Recent work has demonstrated substantial gains on many NLP tasks and benchmarks by pre-training on a large corpus of text followed by fine-tuning on a specific task. While typically task-agnostic in architecture, this method still requires task-specific fine-tuning datasets of thousands or tens of thousands of examples. By contrast, humans can generally perform a new language task from only a few examples or from simple instructions - something which current NLP systems still largely struggle to do. Here we show that scaling up language models greatly improves task-agnostic, few-shot performance, sometimes even reaching competitiveness with prior state-of-the-art fine-tuning approaches. Specifically, we train GPT-3, an autoregressive language model with 175 billion parameters, 10x more than any previous non-sparse language model, and test its performance in the few-shot setting. For all tasks, GPT-3 is applied without any gradient updates or fine-tuning, with tasks and few-shot demonstrations specified purely via text interaction with the model. GPT-3 achieves strong performance on many NLP datasets, including translation, question-answering, and cloze tasks, as well as several tasks that require on-the-fly reasoning or domain adaptation, such as unscrambling words, using a novel word in a sentence, or performing 3-digit arithmetic. At the same time, we also identify some datasets where GPT-3's few-shot learning still struggles, as well as some datasets where GPT-3 faces methodological issues related to training on large web corpora. Finally, we find that GPT-3 can generate samples of news articles which human evaluators have difficulty distinguishing from articles written by humans. We discuss broader societal impacts of this finding and of GPT-3 in general."
"We find that larger models can often (but not always) perform NLP tasks given only natural language prompt and a few examples in the context. No fine-tuning. This in-context learning happens entirely within the forward-pass on a single sequence. We study this in the zero-, one- and few-shot settings. One way to think about this: In-context learning is the inner loop of meta-learning, and unsupervised pre-training is the outer loop. To do well at pre-training, a language model needs to learn to quickly recognize patterns within the context of a given sequence."
"GPT-3 seems to be quite strong at question answering and trivia. We find that it can be competitive with the fine-tuned SOTA despite being shown only a few examples of the task and performing no gradient updates after pre-training."
"For SuperGLUE, we find that GPT-3 with 32 examples per task performs slightly better than a fine-tuned BERT-large (which is far smaller than GPT-3). So in this case, massively scaling up the model massively reduced the data requirements."
"GPT-3 is hamstrung by its training & data, but just simply training a big model on a lot of data induces meta-learning without even the slightest bit of meta-learning architecture being built in; and in general, training on more and harder tasks creates ever more human-like performance, generalization, and robustness."
- https://github.com/elyase/awesome-gpt3 (demo)
- https://gpt3examples.com (demo)
- https://aiwriter.email (demo)
- https://twitter.com/QasimMunye/status/1278750809094750211
videohttps://vimeo.com/427943407/98fe5258a7 (demo)videohttps://pscp.tv/Microsoft/1OyKAYWPRrWKb?t=29m19s (demo)- https://justpaste.it/7eovk (demo)
- https://reddit.com/user/thegentlemetre/comments (demo)
videohttps://youtube.com/watch?v=QMqPAM_knrE (Kaplan)videohttps://youtube.com/watch?v=iccd86vOz3w (Scarfe, Kilcher, Leahy, Saba, Marcus)videohttps://youtube.com/watch?v=fTvB5xMNfTY&t=39m20s (Kilcher, Scarfe, Duggar, Leahy)videohttps://youtube.com/watch?v=7qPDwsCLbZc (Kilcher, Shorten, Scarfe)videohttps://youtube.com/watch?v=SY5PvZrJhLE (Kilcher)videohttps://youtube.com/watch?v=wYdKn-X4MhY (Raschka)videohttps://youtube.com/watch?v=Mq97CF02sRY (Heo)videohttps://youtu.be/J0p_thJJnoo?t=37m3s (Chollet)videohttps://youtu.be/PUAdj3w3wO4?t=42m24s (Chollet)videohttps://youtube.com/watch?v=GJkXBGRHZWQ (Shamshiev)in russianvideohttps://youtu.be/zhsUpUFClEU?t=18m5s (Astakhov)in russianposthttps://jalammar.github.io/how-gpt3-works-visualizations-animationsposthttps://gwern.net/newsletter/2020/05#gpt-3posthttps://gwern.net/GPT-3posthttps://slatestarcodex.com/2020/06/10/the-obligatory-gpt-3-postposthttps://bmk.sh/2020/05/29/GPT-3-A-Brief-Summaryposthttps://leogao.dev/2020/08/17/Building-AGI-Using-Language-Modelsposthttps://medium.com/@ChrisGPotts/is-it-possible-for-language-models-to-achieve-language-understanding-81df45082ee2noteshttps://erogol.com/short-notes-on-gpt-3noteshttps://blog.inten.to/gpt-3-language-models-are-few-shot-learners-a13d1ae8b1f9noteshttps://lambdalabs.com/blog/demystifying-gpt-3
"Representation Learning with Contrastive Predictive Coding" Oord, Li, Vinyals
CPC InfoNCE representation learning
"While supervised learning has enabled great progress in many applications, unsupervised learning has not seen such widespread adoption, and remains an important and challenging endeavor for artificial intelligence. In this work, we propose a universal unsupervised learning approach to extract useful representations from high-dimensional data, which we call Contrastive Predictive Coding. The key insight of our model is to learn such representations by predicting the future in latent space by using powerful autoregressive models. We use a probabilistic contrastive loss which induces the latent space to capture information that is maximally useful to predict future samples. It also makes the model tractable by using negative sampling. While most prior work has focused on evaluating representations for a particular modality, we demonstrate that our approach is able to learn useful representations achieving strong performance on four distinct domains: speech, images, text and reinforcement learning in 3D environments."
"Using mutual information between the representation of the current input, and input close in space or time as a self-supervised criteria."
"Linsker [1988] developed the InfoMax principle in 1988. It theorizes that the brain learns to process its perceptions by maximally preserving the information of the input activities in each layer. On top of this, neuroscience suggests that the brain predicts its future inputs and learns by minimizing this prediction error [Friston, 2010]. Empirical evidence indicates, for example, that retinal cells carry significant mutual information between the current and the future state of their own activity [Palmer et al., 2015]."
posthttps://medium.com/syncedreview/new-deepmind-unsupervised-image-model-challenges-alexnet-d658ef92ab1evideohttps://youtu.be/QoCyQBzi7us?t=1h9m51s (Oord)videohttps://youtu.be/dMUes74-nYY?t=1h19m29s (Srinivas)videohttps://youtu.be/AC4l_MY2Dhc?t=1h6m33s (Srinivas)videohttps://youtu.be/1sJuWg5dULg?t=33m12s (Srinivas)videohttps://youtu.be/DSYzHPW26Ig?t=1h24m53s (Graves)videohttps://youtu.be/QE36xa8NqPA?t=31m15s (Sobolev)videohttps://youtube.com/watch?v=y8pgdXdYPwU (Atanov)in russianposthttps://ankeshanand.com/blog/2020/01/26/contrative-self-supervised-learning.htmlposthttps://machinethoughts.wordpress.com/2018/08/15/predictive-coding-and-mutual-informationpaper"Data-Efficient Image Recognition with Contrastive Predictive Coding" by Henaff et al. (overview by Henaffvideo, overview by Srinivasvideo) (CPC v2)paper"On Variational Bounds of Mutual Information" by Poole et al.paper"Learning Deep Representations by Mutual Information Estimation and Maximization" by Hjelm et al. (Deep InfoMax)paper"Putting An End to End-to-End: Gradient-Isolated Learning of Representations" by Lowe et al. (Greedy InfoMax)paper"Self-Organization in a Perceptual Network" by Linsker (InfoMax)paper"The Free-Energy principle: a Unified Brain Theory?" by Friston et al.paper"Noise-Contrastive Estimation of Unnormalized Statistical Models, with Applications to Natural Image Statistics" by Gutmann and Hyvarinen
"Revisiting Self-Supervised Visual Representation Learning" Kolesnikov, Zhai, Beyer
representation learning
"Unsupervised visual representation learning remains a largely unsolved problem in computer vision research. Among a big body of recently proposed approaches for unsupervised learning of visual representations, a class of self-supervised techniques achieves superior performance on many challenging benchmarks. A large number of the pretext tasks for self-supervised learning have been studied, but other important aspects, such as the choice of convolutional neural networks, has not received equal attention. Therefore, we revisit numerous previously proposed self-supervised models, conduct a thorough large scale study and, as a result, uncover multiple crucial insights. We challenge a number of common practices in selfsupervised visual representation learning and observe that standard recipes for CNN design do not always translate to self-supervised representation learning. As part of our study, we drastically boost the performance of previously proposed techniques and outperform previously published state-of-the-art results by a large margin. "
"Specifically, we provide a re-implementation of the following self-supervised representation learning techniques:
- Unsupervised Representation Learning by Predicting Image Rotations
- Unsupervised Visual Representation Learning by Context Prediction
- Unsupervised Learning of Visual Representations by Solving Jigsaw Puzzles
- Discriminative Unsupervised Feature Learning with Exemplar Convolutional Neural Networks"
videohttps://facebook.com/icml.imls/videos/378993762742156?t=2566 (Zhai)videohttps://youtube.com/watch?v=lbKg3OSTsgA (Shorten)noteshttps://blog.lunit.io/2019/03/14/revisiting-self-supervised-visual-representation-learningcodehttps://github.com/google/revisiting-self-supervised
"This paper presents a study of semi-supervised learning with large convolutional networks. We propose a pipeline, based on a teacher/student paradigm, that leverages a large collection of unlabelled images (up to 1 billion). Our main goal is to improve the performance for a given target architecture, like ResNet-50 or ResNext. We provide an extensive analysis of the success factors of our approach, which leads us to formulate some recommendations to produce high-accuracy models for image classification with semi-supervised learning. As a result, our approach brings important gains to standard architectures for image, video and fine-grained classification. For instance, by leveraging one billion unlabelled images, our learned vanilla ResNet-50 achieves 81.2% top-1 accuracy on the ImageNet benchmark."
"We present a simple self-training method that achieves 87.4% top-1 accuracy on ImageNet, which is 1.0% better than the state-of-the-art model that requires 3.5B weakly labeled Instagram images. On robustness test sets, it improves ImageNet-A top-1 accuracy from 16.6% to 74.2%, reduces ImageNet-C mean corruption error from 45.7 to 31.2, and reduces ImageNet-P mean flip rate from 27.8 to 16.1. To achieve this result, we first train an EfficientNet model on labeled ImageNet images and use it as a teacher to generate pseudo labels on 300M unlabeled images. We then train a larger EfficientNet as a student model on the combination of labeled and pseudo labeled images. We iterate this process by putting back the student as the teacher. During the generation of the pseudo labels, the teacher is not noised so that the pseudo labels are as good as possible. But during the learning of the student, we inject noise such as data augmentation, dropout, stochastic depth to the student so that the noised student is forced to learn harder from the pseudo labels."
videohttps://youtube.com/watch?v=q7PjrmGNx5A (Kilcher)videohttps://youtube.com/watch?v=Y8YaU9mv_us (Shorten)videohttps://youtube.com/watch?v=gVfnb4EOPZE (Kaur, Fadel)noteshttps://harangdev.github.io/papers/9/
interesting recent papers
interesting recent papers - generative models
https://github.com/zhangqianhui/AdversarialNetsPapers
https://github.com/nightrome/really-awesome-gan/
"Generative Adversarial Networks" Goodfellow, Pouget-Abadie, Mirza, Xu, Warde-Farley, Ozair, Courville, Bengio
"We propose a new framework for estimating generative models via an adversarial process, in which we simultaneously train two models: a generative model G that captures the data distribution, and a discriminative model D that estimates the probability that a sample came from the training data rather than G. The training procedure for G is to maximize the probability of D making a mistake. This framework corresponds to a minimax two-player game. In the space of arbitrary functions G and D, a unique solution exists, with G recovering the training data distribution and D equal to 1/2 everywhere. In the case where G and D are defined by multilayer perceptrons, the entire system can be trained with backpropagation. There is no need for any Markov chains or unrolled approximate inference networks during either training or generation of samples."
- http://cs.stanford.edu/people/karpathy/gan/ (demo)
videohttps://youtube.com/watch?v=eyxmSmjmNS0 (Kilcher)videohttps://channel9.msdn.com/Events/Neural-Information-Processing-Systems-Conference/Neural-Information-Processing-Systems-Conference-NIPS-2016/Generative-Adversarial-Networks (Goodfellow)videohttps://youtu.be/1CT-kxjYbFU?t=13m34s (Abbeel)posthttp://www.offconvex.org/2017/03/15/GANs/ (Arora)posthttp://inference.vc/how-to-train-your-generative-models-why-generative-adversarial-networks-work-so-well-2/posthttp://inference.vc/an-alternative-update-rule-for-generative-adversarial-networks/posthttp://blog.evjang.com/2016/06/generative-adversarial-nets-in.htmlposthttps://oshearesearch.com/index.php/2016/07/01/mnist-generative-adversarial-model-in-keras/codehttps://github.com/wiseodd/generative-models/tree/master/GANposthttps://web.archive.org/web/20120312111546/http://yehar.com:80/blog/?p=167paper"Unsupervised Minimax: Adversarial Curiosity, Generative Adversarial Networks, and Predictability Minimization" by Schmidhubersummary
"Adversarial Autoencoders" Makhzani, Shlens, Jaitly, Goodfellow
"In this paper we propose a new method for regularizing autoencoders by imposing an arbitrary prior on the latent representation of the autoencoder. Our method, named “adversarial autoencoder”, uses the recently proposed generative adversarial networks in order to match the aggregated posterior of the hidden code vector of the autoencoder with an arbitrary prior. Matching the aggregated posterior to the prior ensures that there are no “holes” in the prior, and generating from any part of prior space results in meaningful samples. As a result, the decoder of the adversarial autoencoder learns a deep generative model that maps the imposed prior to the data distribution. We show how adversarial autoencoders can be used to disentangle style and content of images and achieve competitive generative performance on MNIST, Street View House Numbers and Toronto Face datasets."
"In this paper we proposed a general framework to turn any autoencoder into a generative model by imposing an arbitrary distribution on the latent representation of the autoencoder. In our model, an autoencoder is trained with dual objectives - a traditional reconstruction error criterion, and an adversarial training criterion (Goodfellow et al., 2014) that matches the aggregated posterior distribution of the latent representation of the autoencoder to an arbitrary prior distribution. We show that this training criterion has a strong connection to VAE training. The result of the training is that the encoder learns to convert the data distribution to the prior distribution, while the decoder learns a deep generative model that maps the imposed prior to the data distribution. We discussed how this method can be extended to semi-supervised settings by incorporating the label information to better shape the hidden code distribution. Importantly, we demonstrated how it can be used to disentangle the style and label information of a dataset (Kingma et al., 2014; Cheung et al., 2014). Finally we showed that adversarial autoencoders can achieve state-of-the-art likelihoods on real-valued MNIST and Toronto Face datasets."
"An important difference between VAEs and adversarial autoencoders is that in VAEs, in order to back-propagate through the KL divergence by Monte-Carlo sampling, we need to have access to the exact functional form of the prior distribution. However, in adversarial autoencoders, we only need to be able to sample from the prior distribution in order to induce q(z) to match p(z). In Section 3, we demonstrate that the adversarial autoencoder can impose complicated distributions without having access to the explicit functional form of the distribution."
"Minimising DKL[Q(Z|X) || P(Z)] of VAE penalises the model Q(Z) if it contains samples that are outside the support of the true distribution P(Z), which might mean that Q(Z) captures only a part of P(Z). This means that when sampling P(Z), we may sample a region that is not captured by Q(Z). The reverse KL divergence, DKL[P(Z) || Q(Z|X)], penalises the model Q(Z) if P(Z) produces samples that are outside of the support of Q(Z). By minimising this KL divergence, most samples in P(Z) will likely be in Q(Z) as well. AAEs are regularised using the JS entropy, given by 1/2 * DKL[P(Z) || 1/2 * (P(Z) + Q(Z|X))] + 1/2 * DKL[Q(Z|X) || 1/2 * (P(Z) + Q(Z|X))]. Minimising this cost function attempts to find a compromise between the aforementioned extremes."
posthttp://dustintran.com/blog/adversarial-autoencoders/posthttp://inference.vc/adversarial-autoencoders/posthttps://blog.paperspace.com/adversarial-autoencoders-with-pytorch/noteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/MakhzaniSJG15codehttps://github.com/wiseodd/generative-models/tree/master/VAE/adversarial_autoencoderpaper"From Optimal Transport to Generative Modeling: the VEGAN Cookbook" by Bousquet et al.
"InfoGAN: Interpretable Representation Learning by Information Maximizing Generative Adversarial Nets" Chen, Duan, Houthooft, Schulman, Sutskever, Abbeel
"This paper describes InfoGAN, an information-theoretic extension to the Generative Adversarial Network that is able to learn disentangled representations in a completely unsupervised manner. InfoGAN is a generative adversarial network that also maximizes the mutual information between a small subset of the latent variables and the observation. We derive a lower bound of the mutual information objective that can be optimized efficiently. Specifically, InfoGAN successfully disentangles writing styles from digit shapes on the MNIST dataset, pose from lighting of 3D rendered images, and background digits from the central digit on the SVHN dataset. It also discovers visual concepts that include hair styles, presence/absence of eyeglasses, and emotions on the CelebA face dataset. Experiments show that InfoGAN learns interpretable representations that are competitive with representations learned by existing supervised methods."
"In contrast to previous approaches, which require supervision, InfoGAN is completely unsupervised and learns interpretable and disentangled representations on challenging datasets. In addition, InfoGAN adds only negligible computation cost on top of GAN and is easy to train. The core idea of using mutual information to induce representation can be applied to other methods like VAE, which is a promising area of future work. Other possible extensions to this work include: learning hierarchical latent representations, improving semi-supervised learning with better codes, and using InfoGAN as a high-dimensional data discovery tool."
"An extension of GAN that learns disentangled and interpretable representations for images. A regular GAN achieves the objective of reproducing the data distribution in the model, but the layout and organization of the code space is underspecified - there are many possible solutions to mapping the unit Gaussian to images and the one we end up with might be intricate and highly entangled. The InfoGAN imposes additional structure on this space by adding new objectives that involve maximizing the mutual information between small subsets of the representation variables and the observation. This approach provides quite remarkable results. For example, in the images of 3D faces we vary one continuous dimension of the code, keeping all others fixed. It's clear from the five provided examples that the resulting dimensions in the code capture interpretable dimensions, and that the model has perhaps understood that there are camera angles, facial variations, etc., without having been told that these features exist and are important."
- https://goo.gl/58Ishd + https://goo.gl/q7Hp99 + https://goo.gl/Ceqlr4 + https://goo.gl/9ibbsV (demo)
videohttps://channel9.msdn.com/Events/Neural-Information-Processing-Systems-Conference/Neural-Information-Processing-Systems-Conference-NIPS-2016/Deep-Learning-Symposium-Session-1 (53:28) (Chen)posthttp://depthfirstlearning.com/2018/InfoGANposthttp://inference.vc/infogan-variational-bound-on-mutual-information-twice/posthttp://wiseodd.github.io/techblog/2017/01/29/infogan/codehttps://github.com/openai/InfoGANcodehttps://github.com/wiseodd/generative-models/tree/master/GAN/infogancodehttps://github.com/Natsu6767/InfoGAN-PyTorch
"BEGAN: Boundary Equilibrium Generative Adversarial Networks" Berthelot, Schumm, Metz
"We propose a new equilibrium enforcing method paired with a loss derived from the Wasserstein distance for training auto-encoder based Generative Adversarial Networks. This method balances the generator and discriminator during training. Additionally, it provides a new approximate convergence measure, fast and stable training and high visual quality. We also derive a way of controlling the trade-off between image diversity and visual quality. We focus on the image generation task, setting a new milestone in visual quality, even at higher resolutions. This is achieved while using a relatively simple model architecture and a standard training procedure."
"- A GAN with a simple yet robust architecture, standard training procedure with fast and stable convergence.
- An equilibrium concept that balances the power of the discriminator against the generator.
- A new way to control the trade-off between image diversity and visual quality.
- An approximate measure of convergence. To our knowledge the only other published measure is from Wasserstein GAN."
"We introduced BEGAN, a GAN that uses an auto-encoder as the discriminator. Using the proposed equilibrium method, this network converges to diverse and visually pleasing images. This remains true at higher resolutions with trivial modifications. Training is stable, fast and robust to parameter changes. It does not require a complex alternating training procedure. Our approach provides at least partial solutions to some outstanding GAN problems such as measuring convergence, controlling distributional diversity and maintaining the equilibrium between the discriminator and the generator."
"There are still many unexplored avenues. Does the discriminator have to be an auto-encoder? Having pixel-level feedback seems to greatly help convergence, however using an auto-encoder has its drawbacks: what internal embedding size is best for a dataset? When should noise be added to the input and how much? What impact would using other varieties of auto-encoders such Variational Auto-Encoders have?"
- https://pbs.twimg.com/media/C8lYiYbW0AI4_yk.jpg:large + https://pbs.twimg.com/media/C8c6T2kXsAAI-BN.jpg (demo)
posthttps://blog.heuritech.com/2017/04/11/began-state-of-the-art-generation-of-faces-with-generative-adversarial-networks/noteshttps://reddit.com/r/MachineLearning/comments/633jal/r170310717_began_boundary_equilibrium_generative/dfrktje/codehttps://github.com/carpedm20/BEGAN-tensorflowcodehttps://github.com/carpedm20/BEGAN-pytorch
{kind=link}
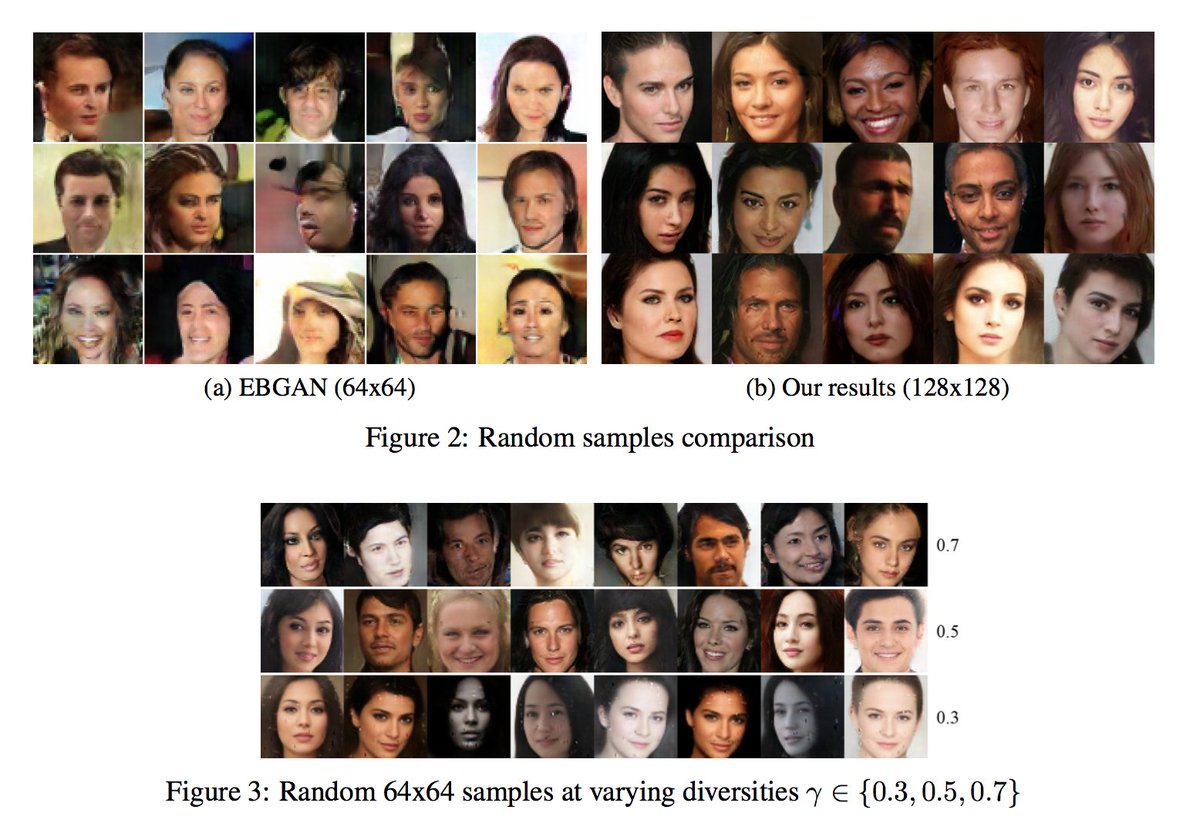{kind=link}
"Wasserstein GAN" Arjovsky, Chintala, Bottou
GAN objective WGAN
"We introduce a new algorithm named WGAN, an alternative to traditional GAN training. In this new model, we show that we can improve the stability of learning, get rid of problems like mode collapse, and provide meaningful learning curves useful for debugging and hyperparameter searches. Furthermore, we show that the corresponding optimization problem is sound, and provide extensive theoretical work highlighting the deep connections to other distances between distributions."
"Paper uses Wasserstein distance instead of Jensen-Shannon divergence to compare distributions."
"Paper gets rid of a few unnecessary logarithms, and clips weights.""Loss curves that actually make sense and reflect sample quality."
Authors show how one can have meaningful and stable training process without having to cripple or undertrain the discriminator.
Authors show why original GAN formulations (using KL/JS divergence) are problematic and provide a solution for those problems.""There are two fundamental problems in doing image generation using GANs: 1) model structure 2) optimization instability. This paper makes no claims of improving model structure nor does it have experiments in that direction. To improve on imagenet generation, we need some work in (1) as well."
"Authors are not claiming that this directly improves image quality, but offers a host of other benefits like stability, the ability to make drastic architecture changes without loss of functionality, and, most importantly, a loss metric that actually appears to correlate with sample quality. That last one is a pretty big deal."
"Using Wasserstein objective reduces instability, but we still lack proof of existence of an equilibrium. Game theory doesn’t help because we need a so-called pure equilibrium, and simple counter-examples such as rock/paper/scissors show that it doesn’t exist in general. Such counterexamples are easily turned into toy GAN scenarios with generator and discriminator having finite capacity, and the game lacks a pure equilibrium."
"The originality is a focus on continuous distributions with low-dimensional support and the idea to parametrize f in order to obtain a fast algorithm."
"Reposing the two-player game as the estimation of the gradient of the 1-Wasserstein distance between the data and generator distributions. Reframing this in terms of the dual form of the 1-Wasserstein, with the critic estimating a function f which maximally separates the two distributions. It still faces limitations when the critic solution is approximate, i.e. when f* is not found before each update. In this case, due to insufficient training of the critic or limitations of the function approximator, the gradient direction produced can be arbitrarily bad."
posthttp://depthfirstlearning.com/2019/WassersteinGANvideohttps://youtube.com/watch?v=31mqB4yGgQYvideohttps://youtube.com/watch?v=DfJeaa--xO0&t=26m27s (Bottou)videohttps://facebook.com/iclr.cc/videos/1710657292296663?t=5402 (Arjowski)videohttps://youtu.be/m9USSDtUy40?t=15m14s (Chavdarova)videohttps://youtube.com/watch?v=OdsXPcBfO-c (Arjowski)posthttp://www.alexirpan.com/2017/02/22/wasserstein-gan.htmlposthttps://paper.dropbox.com/doc/Wasserstein-GAN-GvU0p2V9ThzdwY3BbhoP7posthttp://wiseodd.github.io/techblog/2017/02/04/wasserstein-gan/posthttps://vincentherrmann.github.io/blog/wasserstein/posthttps://lilianweng.github.io/lil-log/2017/08/20/from-GAN-to-WGAN.htmlnoteshttps://casmls.github.io/general/2017/02/23/modified-gans.htmlnoteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1701.07875noteshttps://bayesgroup.github.io/sufficient-statistics/posts/wasserstein-generative-adversarial-networks/in russiancodehttps://github.com/martinarjovsky/WassersteinGANcodehttps://github.com/wiseodd/generative-models/tree/master/GAN/wasserstein_gancodehttps://github.com/shekkizh/WassersteinGAN.tensorflowcodehttps://github.com/kuleshov/tf-wgancodehttps://github.com/blei-lab/edward/blob/master/examples/gan_wasserstein.pycodehttps://github.com/tdeboissiere/DeepLearningImplementations/tree/master/WassersteinGAN
"Improved Training of Wasserstein GANs" Gulrajani, Ahmed, Arjovsky, Dumoulin, Courville
GAN objective WGAN-GP
"The recently proposed Wasserstein GAN makes progress toward stable training of GANs, but sometimes can still generate only low-quality samples or fail to converge. We find that these problems are often due to the use of weight clipping in WGAN to enforce a Lipschitz constraint on the critic, which can lead to undesired behavior. We propose an alternative to clipping weights: penalize the norm of gradient of the critic with respect to its input."
posthttp://depthfirstlearning.com/2019/WassersteinGANposthttps://casmls.github.io/general/2017/04/13/gan.htmlposthttps://lernapparat.de/improved-wasserstein-gannoteshttps://bayesgroup.github.io/sufficient-statistics/posts/wasserstein-generative-adversarial-networks/in russiancodehttps://github.com/jalola/improved-wgan-pytorchcodehttps://github.com/wiseodd/generative-models/tree/master/GAN/improved_wasserstein_gancodehttps://github.com/igul222/improved_wgan_training
interesting papers - bayesian deep learning
interesting recent papers
interesting recent papers - unsupervised learning
interesting recent papers - generative models
interesting recent papers - bayesian deep learning
"Auto-Encoding Variational Bayes" Kingma, Welling
"How can we perform efficient inference and learning in directed probabilistic models, in the presence of continuous latent variables with intractable posterior distributions, and large datasets? We introduce a stochastic variational inference and learning algorithm that scales to large datasets and, under some mild differentiability conditions, even works in the intractable case. Our contributions is two-fold. First, we show that a reparameterization of the variational lower bound yields a lower bound estimator that can be straightforwardly optimized using standard stochastic gradient methods. Second, we show that for i.i.d. datasets with continuous latent variables per datapoint, posterior inference can be made especially efficient by fitting an approximate inference model (also called a recognition model) to the intractable posterior using the proposed lower bound estimator. Theoretical advantages are reflected in experimental results."
"Latent variable probabilistic models are ubiquitous, but often inference in such models is intractable. Variational inference methods based on approximation of the true posterior currently are most popular deterministic inference techniques. Recently one particularly interesting method for parametric variational approximation was proposed called Auto-encoding variational bayes. In this method, approximate posterior explicitly depends on data and may be almost arbitrary complex, e.g. a deep neural network. Thus, the problem of variational inference may be considered as a learning of auto-encoder where the code is represented by latent variables, encoder is the likelihood model and decoder is our variational approximation. Since neural networks can serve as universal function approximators, such inference method may allow to obtain better results than for "shallow" parametric approximations or free-form mean-field ones."
videohttps://youtube.com/watch?v=FMuvUZXMzKM (Abbeel)videohttps://youtube.com/watch?v=h0UE8FzdE8U (Lamb)videohttp://youtube.com/watch?v=rjZL7aguLAs (Kingma)videohttps://youtu.be/tjT4Wf86FMM?t=21m55s (Vetrov)videohttps://youtu.be/RdFqBHCizp8?t=21m6s (Vetrov)videohttp://videolectures.net/deeplearning2015_courville_autoencoder_extension/ (Courville)videohttps://youtube.com/watch?v=Tc-XfiDPLf4 (Dolatabadi)videohttps://youtu.be/if9bTlZOiO8?t=26m35s (Vetrov)in russianvideohttps://youtube.com/watch?v=odNqVVyAqkE (Vetrov)in russianvideohttps://youtu.be/_qrHcSdQ2J4?t=1h37m21s (Vetrov)in russianpaperhttp://arxiv.org/abs/1606.05908 + https://github.com/cdoersch/vae_tutorial (tutorial)paperhttp://arxiv.org/abs/1610.09296 (explanation)posthttp://kvfrans.com/variational-autoencoders-explained/posthttps://towardsdatascience.com/intuitively-understanding-variational-autoencoders-1bfe67eb5dafposthttp://hsaghir.github.io/denoising-vs-variational-autoencoder/posthttp://jaan.io/what-is-variational-autoencoder-vae-tutorial/posthttp://blog.keras.io/building-autoencoders-in-keras.htmlposthttps://jmetzen.github.io/2015-11-27/vae.htmlposthttp://blog.fastforwardlabs.com/post/148842796218/introducing-variational-autoencoders-in-prose-andposthttp://blog.fastforwardlabs.com/post/149329060653/under-the-hood-of-the-variational-autoencoder-incodehttps://github.com/wiseodd/generative-models/tree/master/VAEcodehttps://github.com/fchollet/keras/blob/master/examples/variational_autoencoder.py
"Stochastic Backpropagation and Approximate Inference in Deep Generative Models" Rezende, Mohamed, Wiestra
"We marry ideas from deep neural networks and approximate Bayesian inference to derive a generalised class of deep, directed generative models, endowed with a new algorithm for scalable inference and learning. Our algorithm introduces a recognition model to represent an approximate posterior distribution and uses this for optimisation of a variational lower bound. We develop stochastic back-propagation rules for gradient backpropagation through stochastic variables and derive an algorithm that allows for joint optimisation of the parameters of both the generative and recognition models. We demonstrate on several real-world data sets that by using stochastic backpropagation and variational inference, we obtain models that are able to generate realistic samples of data, allow for accurate imputations of missing data, and provide a useful tool for high-dimensional data visualisation."
videohttp://techtalks.tv/talks/stochastic-backpropagation-and-approximate-inference-in-deep-generative-models/60885/videohttp://vk.com/video-44016343_456239093 (Stepochkin)in russian
"Importance Weighted Autoencoders" Burda, Grosse, Salakhutdinov
IWAE
"The variational autoencoder (VAE; Kingma, Welling (2014)) is a recently proposed generative model pairing a top-down generative network with a bottom-up recognition network which approximates posterior inference. It typically makes strong assumptions about posterior inference, for instance that the posterior distribution is approximately factorial, and that its parameters can be approximated with nonlinear regression from the observations. As we show empirically, the VAE objective can lead to overly simplified representations which fail to use the network's entire modeling capacity. We present the importance weighted autoencoder (IWAE), a generative model with the same architecture as the VAE, but which uses a strictly tighter log-likelihood lower bound derived from importance weighting. In the IWAE, the recognition network uses multiple samples to approximate the posterior, giving it increased flexibility to model complex posteriors which do not fit the VAE modeling assumptions. We show empirically that IWAEs learn richer latent space representations than VAEs, leading to improved test log-likelihood on density estimation benchmarks."
videohttps://youtube.com/watch?v=FMuvUZXMzKM (Abbeel)videohttps://youtu.be/0IoLKnAg6-s?t=14m41s (Chen)videohttps://facebook.com/nipsfoundation/videos/1555493854541848?t=1771 (Teh)videohttps://youtube.com/watch?v=rNmgOCWEGDg (Struminsky)in russianposthttp://dustintran.com/blog/importance-weighted-autoencoders/posthttps://casmls.github.io/general/2017/04/24/iwae-aae.htmlnoteshttp://artem.sobolev.name/posts/2016-07-14-neural-variational-importance-weighted-autoencoders.htmlnoteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/BurdaGS15codehttps://github.com/yburda/iwaecodehttps://github.com/arahuja/generative-tfcodehttps://github.com/blei-lab/edward/blob/master/examples/iwvi.py
"Semi-supervised Learning with Deep Generative Models" Kingma, Rezende, Mohamed, Welling
"The ever-increasing size of modern data sets combined with the difficulty of obtaining label information has made semi-supervised learning one of the problems of significant practical importance in modern data analysis. We revisit the approach to semi-supervised learning with generative models and develop new models that allow for effective generalisation from small labelled data sets to large unlabelled ones. Generative approaches have thus far been either inflexible, inefficient or non-scalable. We show that deep generative models and approximate Bayesian inference exploiting recent advances in variational methods can be used to provide significant improvements, making generative approaches highly competitive for semi-supervised learning."
"The approximate inference methods introduced here can be easily extended to the model’s parameters, harnessing the full power of variational learning. Such an extension also provides a principled ground for performing model selection. Efficient model selection is particularly important when the amount of available data is not large, such as in semi-supervised learning. For image classification tasks, one area of interest is to combine such methods with convolutional neural networks that form the gold-standard for current supervised classification methods. Since all the components of our model are parametrised by neural networks we can readily exploit convolutional or more general locally-connected architectures – and forms a promising avenue for future exploration."
"A limitation of the models we have presented is that they scale linearly in the number of classes in the data sets. Having to re-evaluate the generative likelihood for each class during training is an expensive operation. Potential reduction of the number of evaluations could be achieved by using a truncation of the posterior mass. For instance we could combine our method with the truncation algorithm suggested by Pal et al. (2005), or by using mechanisms such as error-correcting output codes. The extension of our model to multi-label classification problems that is essential for image-tagging is also possible, but requires similar approximations to reduce the number of likelihood-evaluations per class."
"We have developed new models for semi-supervised learning that allow us to improve the quality of prediction by exploiting information in the data density using generative models. We have developed an efficient variational optimisation algorithm for approximate Bayesian inference in these models and demonstrated that they are amongst the most competitive models currently available for semisupervised learning."
"
- We describe a new framework for semi-supervised learning with generative models, employing rich parametric density estimators formed by the fusion of probabilistic modelling and deep neural networks.
- We show for the first time how variational inference can be brought to bear upon the problem of semi-supervised classification. In particular, we develop a stochastic variational inference algorithm that allows for joint optimisation of both model and variational parameters, and that is scalable to large datasets.
- We demonstrate the performance of our approach on a number of data sets providing state-of-the-art results on benchmark problems.
- We show qualitatively generative semi-supervised models learn to separate the data classes (content types) from the intra-class variabilities (styles), allowing in a very straightforward fashion to simulate analogies of images on a variety of datasets."
videohttps://youtube.com/watch?v=bJhV2C5KKZ4 (Kingma)videohttp://videolectures.net/deeplearning2015_courville_autoencoder_extension/#t=3192 (Courville)videohttps://youtu.be/0veUbpdBqyk?t=1h7m46s (Chervinsky)in russianposthttp://bjlkeng.github.io/posts/semi-supervised-learning-with-variational-autoencoders/
"Unsupervised Learning of 3D Structure from Images" Rezende, Eslami, Mohamed, Battaglia, Jaderberg, Heess
"A key goal of computer vision is to recover the underlying 3D structure from 2D observations of the world. In this paper we learn strong deep generative models of 3D structures, and recover these structures from 3D and 2D images via probabilistic inference. We demonstrate high-quality samples and report log-likelihoods on several datasets, including ShapeNet, and establish the first benchmarks in the literature. We also show how these models and their inference networks can be trained end-to-end from 2D images. This demonstrates for the first time the feasibility of learning to infer 3D representations of the world in a purely unsupervised manner."
"A key goal of computer vision is that of recovering the underlying 3D structure that gives rise to these 2D observations. The 2D projection of a scene is a complex function of the attributes and positions of the camera, lights and objects that make up the scene. If endowed with 3D understanding, agents can abstract away from this complexity to form stable, disentangled representations, e.g., recognizing that a chair is a chair whether seen from above or from the side, under different lighting conditions, or under partial occlusion. Moreover, such representations would allow agents to determine downstream properties of these elements more easily and with less training, e.g., enabling intuitive physical reasoning about the stability of the chair, planning a path to approach it, or figuring out how best to pick it up or sit on it. Models of 3D representations also have applications in scene completion, denoising, compression and generative virtual reality."
"There have been many attempts at performing this kind of reasoning, dating back to the earliest years of the field. Despite this, progress has been slow for several reasons: First, the task is inherently ill-posed. Objects always appear under self-occlusion, and there are an infinite number of 3D structures that could give rise to a particular 2D observation. The natural way to address this problem is by learning statistical models that recognize which 3D structures are likely and which are not. Second, even when endowed with such a statistical model, inference is intractable. This includes the sub-tasks of mapping image pixels to 3D representations, detecting and establishing correspondences between different images of the same structures, and that of handling the multi-modality of the representations in this 3D space. Third, it is unclear how 3D structures are best represented, e.g., via dense volumes of voxels, via a collection of vertices, edges and faces that define a polyhedral mesh, or some other kind of representation. Finally, ground-truth 3D data is difficult and expensive to collect and therefore datasets have so far been relatively limited in size and scope."
"We design a strong generative model of 3D structures, defined over the space of volumes and meshes, using ideas from state-of-the-art generative models of images.
We show that our models produce high-quality samples, can effectively capture uncertainty and are amenable to probabilistic inference, allowing for applications in 3D generation and simulation. We report log-likelihoods on a dataset of shape primitives, a 3D version of MNIST, and on ShapeNet, which to the best of our knowledge, constitutes the first quantitative benchmark for 3D density modeling.
We show how complex inference tasks, e.g., that of inferring plausible 3D structures given a 2D image, can be achieved using conditional training of the models. We demonstrate that such models recover 3D representations in one forward pass of a neural network and they accurately capture the multi-modality of the posterior.
We explore both volumetric and mesh-based representations of 3D structure. The latter is achieved by flexible inclusion of off-the-shelf renders such as OpenGL. This allows us to build in further knowledge of the rendering process, e.g., how light bounces of surfaces and interacts with its material’s attributes.
We show how the aforementioned models and inference networks can be trained end-to-end directly from 2D images without any use of ground-truth 3D labels. This demonstrates for the first time the feasibility of learning to infer 3D representations of the world in a purely unsupervised manner."
"In this paper we introduced a powerful family of 3D generative models inspired by recent advances in image modeling. We showed that when trained on ground-truth volumes, they can produce high-quality samples that capture the multi-modality of the data. We further showed how common inference tasks, such as that of inferring a posterior over 3D structures given a 2D image, can be performed efficiently via conditional training. We also demonstrated end-to-end training of such models directly from 2D images through the use of differentiable renderers. We experimented with two kinds of 3D representations: volumes and meshes. Volumes are flexible and can capture a diverse range of structures, however they introduce modeling and computational challenges due to their high dimensionality. Conversely, meshes can be much lower dimensional and therefore easier to work with, and they are the data-type of choice for common rendering engines, however standard paramaterizations can be restrictive in the range of shapes they can capture."
videohttps://youtube.com/watch?v=stvDAGQwL5c + https://goo.gl/9hCkxs (demo)videohttps://docs.google.com/presentation/d/12uZQ_Vbvt3tzQYhWR3BexqOzbZ-8AeT_jZjuuYjPJiY/pub?start=true&loop=true&delayms=30000#slide=id.g1329951dde_0_0 (demo)videohttps://youtu.be/AggqBRdz6CQ?t=13m29s (Mohamed)noteshttps://blog.acolyer.org/2017/01/05/unsupervised-learning-of-3d-structure-from-images/
"Variational Lossy Autoencoder" Chen, Kingma, Salimans, Duan, Dhariwal, Schulman, Sutskever, Abbeel
VLAE
"Representation learning seeks to expose certain aspects of observed data in a learned representation that’s amenable to downstream tasks like classification. For instance, a good representation for 2D images might be one that describes only global structure and discards information about detailed texture. In this paper, we present a simple but principled method to learn such global representations by combining Variational Autoencoder (VAE) with neural autoregressive models such as RNN, MADE and PixelRNN/CNN. Our proposed VAE model allows us to have control over what the global latent code can learn and by designing the architecture accordingly, we can force the global latent code to discard irrelevant information such as texture in 2D images, and hence the code only “autoencodes” data in a lossy fashion. In addition, by leveraging autoregressive models as both prior distribution p(z) and decoding distribution p(x|z), we can greatly improve generative modeling performance of VAEs, achieving new state-of-the-art results on MNIST, OMNIGLOT and Caltech-101 Silhouettes density estimation tasks."
"In this paper, we analyze the condition under which the latent code in VAE should be used, i.e. when does VAE autoencode, and use this observation to design a VAE model that’s a lossy compressor of observed data. At modeling level, we propose two complementary improvements to VAE that are shown to have good empirical performance. VLAE has the appealing properties of controllable representation learning and improved density estimation performance but these properties come at a cost: compared with VAE models that have simple prior and decoder, VLAE is slower at generation due to the sequential nature of autoregressive model. In addition, we also tried our method on CIFAR-10 dataset, but so far we only got 3.09 bits per dim, which is not as good as PixelRNN’s 3.00 bits per dim. We believe that by improving the VAE training procedure, the gap could be closed. Moving forward, we believe it’s exciting to extend this principle of learning lossy codes to other forms of data, in particular those that have a temporal aspect like audio and video. Another promising direction is to design representations that contain only information for downstream tasks and utilize those representations to improve semi-supervised learning."
"Information that can be modeled locally by decoding distribution p(x|z) without access to z will be encoded locally and only the remainder will be encoded in z.
There are two ways to utilize this information:
- Use explicit information placement to restrict the reception of the autoregressive model, thereby forcing the model to use the latent code z which is globally provided.
- Parametrize the prior distribution with a autoregressive model showing that a type of autoregressive latent code can reduce inefficiency in Bits-Back coding."
videohttps://youtu.be/FMuvUZXMzKM?t=2h2m12s (Abbeel)posthttp://tsong.me/blog/lossy-vae/
β-VAE disentangled representations
"Learning an interpretable factorised representation of the independent data generative factors of the world without supervision is an important precursor for the development of artificial intelligence that is able to learn and reason in the same way that humans do. We introduce beta-VAE, a new state-of-the-art framework for automated discovery of interpretable factorised latent representations from raw image data in a completely unsupervised manner. Our approach is a modification of the variational autoencoder (VAE) framework. We introduce an adjustable hyperparameter beta that balances latent channel capacity and independence constraints with reconstruction accuracy. We demonstrate that beta-VAE with appropriately tuned beta > 1 qualitatively outperforms VAE (beta = 1), as well as state of the art unsupervised (InfoGAN) and semi-supervised (DC-IGN) approaches to disentangled factor learning on a variety of datasets (celebA, faces and chairs). Furthermore, we devise a protocol to quantitatively compare the degree of disentanglement learnt by different models, and show that our approach also significantly outperforms all baselines quantitatively. Unlike InfoGAN, beta-VAE is stable to train, makes few assumptions about the data and relies on tuning a single hyperparameter, which can be directly optimised through a hyper parameter search using weakly labelled data or through heuristic visual inspection for purely unsupervised data."
"This paper proposes a modification of the variational ELBO to encourage disentangled representations and proposes a measure of disentanglement."
"Beta-VAE is a VAE with beta coefficient in KL divergence term where beta=1 is exactly same formulation of vanilla VAE. By increasing beta, the weighted factor forces model to learn more disentangled representation than VAE. The authors also proposed disentanglement metric by training a simple classifier with low capacity and use it’s prediction accuracy. But the metric can be only calculated in simulator (ground truth generator) setting where we can control independent factors to generate different samples with controlled property."
videohttps://youtu.be/XNGo9xqpgMo?t=10m8s (Higgins)videohttps://youtu.be/FMuvUZXMzKM?t=2h6m37s (Abbeel)videohttps://youtu.be/Wgvcxd98tvU?t=27m17s (Achille)videohttps://cds.cern.ch/record/2302480 (52:29) (Rezende)posthttps://lilianweng.github.io/lil-log/2018/08/12/from-autoencoder-to-beta-vae.html#beta-vaeposthttps://towardsdatascience.com/what-a-disentangled-net-we-weave-representation-learning-in-vaes-pt-1-9e5dbc205bd1paper"Early Visual Concept Learning with Unsupervised Deep Learning" by Higgins et al.paper"Understanding Disentangling in β-VAE" by Burgess et al.
"Adversarially Learned Inference" Dumoulin, Belghazi, Poole, Lamb, Arjovsky, Mastropietro, Courville
"We introduce the adversarially learned inference (ALI) model, which jointly learns a generation network and an inference network using an adversarial process. The generation network maps samples from stochastic latent variables to the data space while the inference network maps training examples in data space to the space of latent variables. An adversarial game is cast between these two networks and a discriminative network that is trained to distinguish between joint latent/data-space samples from the generative network and joint samples from the inference network. We illustrate the ability of the model to learn mutually coherent inference and generation networks through the inspections of model samples and reconstructions and confirm the usefulness of the learned representations by obtaining a performance competitive with other recent approaches on the semi-supervised SVHN task."
"Despite the impressive progress of VAE-based approaches for learning deep directed generative models, they still suffer from a well-recognized issue of the maximum likelihood training paradigm. Models trained to maximize likelihood of the training data tend to be conservative, distributing probability mass diffusely over the data space. In the case of learning generative models of images, this results in almost all probability mass lying outside the relatively restrictive subset of pixel space occupied by natural images. The direct consequence of this is that image samples from VAE-trained models tend to be blurry. On the other hand, GAN-based techniques are trained via an adversarial process that does not appear to suffer from the same probability mass diffusion problem as does maximum likelihood. While GANs learn a generative model that produces higher-quality samples, only the VAE-based models learn an efficient mechanism for inference. For applications such as semi-supervised learning, GANs are insufficient as they do not provide an efficient inference mechanism."
"Our approach casts the learning of both an inference machine (or encoder) and a deep directed generative model (or decoder) in an GAN-like adversarial framework. A discriminator is trained to discriminate joint samples of the data and the corresponding latent variable from the encoder (or approximate posterior) from joint samples from the decoder. In opposition to the discriminator, we have two generative models, the encoder and the decoder, trained together to fool the discriminator. GAN is an example of how one can leverage highly effective discriminative training techniques in service of learning deep generative networks. Here, we are effectively doubling down on the gambit that we can exploit discriminative training. Not only are we asking the discriminator to distinguish synthetic samples from real data, but we are requiring it to distinguish between two joint distributions over the data space and the latent variables."
"Reconstructions in ALI are quite different from reconstructions in VAE-like models. Instead of focusing on achieving a pixel-perfect reconstruction, ALI produces reconstructions that often faithfully represent more abstract features of the input images, while making mistakes in capturing exact object placement, color, style and (in extreme cases) object identity. These reconstructions suggest that the ALI latent variable representations are potentially more invariant to these less interesting factors of variation in the input and do not devote model capacity to capturing these factors. The fact that ALI’s latent representation tends to focus on semantic information at the expense of low-level details leads us to believe that ALI may be well suited to semi-supervised tasks. We empirically verify this by achieving a competitive performance on the semi-supervised SVHN classification task."
"Figure shows a comparison of the ability of GAN and ALI to fit a simple 2-dimensional synthetic gaussian mixture dataset. The decoder and discriminator networks are matched between ALI and GAN, and the hyperparameters are the same. In this experiment, ALI converges faster than GAN and to a better solution. Despite the relative simplicity of the data distribution, GAN partially failed to converge to the distribution, ignoring the central mode. The toy task also exhibits nice properties of the features learned by ALI: when mapped to the latent space, data samples cover the whole prior, and they get clustered by mixture components, with a clear separation between each mode."
"Modified GAN setup to have a "visible generator" compete against a "latent generator" so that the network can perform inference, generation, and semantic reconstruction."
posthttps://ishmaelbelghazi.github.io/ALI/videohttps://youtube.com/watch?v=yyl0-y-k4Nc (Courville)videohttps://youtube.com/watch?v=K3r2k93zJrw (Courville)noteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1606.00704posthttp://inference.vc/variational-inference-using-implicit-models-part-iii-joint-contrastive-inference-ali-and-bigan/codehttps://github.com/IshmaelBelghazi/ALI
"Adversarial Feature Learning" Donahue, Krahenbuhl, Darrell
BiGAN
"The ability of the Generative Adversarial Networks framework to learn generative models mapping from simple latent distributions to arbitrarily complex data distributions has been demonstrated empirically, with compelling results showing generators learn to “linearize semantics” in the latent space of such models. Intuitively, such latent spaces may serve as useful feature representations for auxiliary problems where semantics are relevant. However, in their existing form, GANs have no means of learning the inverse mapping – projecting data back into the latent space. We propose Bidirectional Generative Adversarial Networks (BiGANs) as a means of learning this inverse mapping, and demonstrate that the resulting learned feature representation is useful for auxiliary supervised discrimination tasks, competitive with contemporary approaches to unsupervised and self-supervised feature learning."
"Learns a feature representation with adversarial nets by training an encoder Enc, such that Enc(x) is Gaussian, when x∼preal."
videohttps://youtube.com/watch?v=yyl0-y-k4Nc (Courville)posthttp://inference.vc/variational-inference-using-implicit-models-part-iii-joint-contrastive-inference-ali-and-bigan/paper"Large Scale Adversarial Representation Learning" by Donahue and Simonyan (BigBiGAN)
"Neural Discrete Representation Learning" Oord, Vinyals, Kavukcuoglu
VQ-VAE
"Learning useful representations without supervision remains a key challenge in machine learning. In this paper, we propose a simple yet powerful generative model that learns such discrete representations. Our model, the Vector Quantised-Variational AutoEncoder (VQ-VAE), differs from VAEs in two key ways: the encoder network outputs discrete, rather than continuous, codes; and the prior is learnt rather than static. In order to learn a discrete latent representation, we incorporate ideas from vector quantisation (VQ). Using the VQ method allows the model to circumvent issues of "posterior collapse" -- where the latents are ignored when they are paired with a powerful autoregressive decoder -- typically observed in the VAE framework. Pairing these representations with an autoregressive prior, the model can generate high quality images, videos, and speech as well as doing high quality speaker conversion and unsupervised learning of phonemes, providing further evidence of the utility of the learnt representations."
"Language is inherently discrete, similarly speech is typically represented as a sequence of symbols. Images can often be described concisely by language. Furthermore, discrete representations are a natural fit for complex reasoning, planning and predictive learning."
"Why discrete representation?
- Many important real-world things are discrete
- Easier modelling of the prior (e.g. softmax vs RNADE)
- Preventing posterior collapse
- Using PixelCNN-like decoders"
"We introduce a new family of generative models succesfully combining the VAE framework with discrete latent representations through a novel parameterisation of the posterior distribution of (discrete) latents given an observation. Our model, which relies on vector quantization, is simple to train, does not suffer from large variance, and avoids the “posterior collapse” issue which has been problematic with many VAE models that have a powerful decoder, often caused by latents being ignored. Additionally, it is the first discrete latent VAE model that get similar performance as its continuous counterparts, while offering the flexibility of discrete distributions."
"Since VQ-VAE can make effective use of the latent space, it can successfully model important features that usually span many dimensions in data space (for example objects span many pixels in images, phonemes in speech, the message in a text fragment, etc.) as opposed to focusing or spending capacity on noise and imperceptible details which are often local."
"When paired with a powerful prior, our samples are coherent and high quality on a wide variety of applications such as speech and video generation. We use a PixelCNN over the discrete latents for images, and a WaveNet for raw audio. Training the prior and the VQ-VAE jointly, which could strengthen our results, is left as future research."
"The discrete latent space captures the important aspects of the audio, such as the content of the speech, in a very compressed symbolic representation. Because of this we can now train another WaveNet on top of these latents which can focus on modeling the long-range temporal dependencies without having to spend too much capacity on imperceptible details. With enough data one could even learn a language model directly from raw audio."
"When we condition the decoder in the VQ-VAE on the speaker-id, we can extract latent codes from a speech fragment and reconstruct with a different speaker-id. The VQ-VAE never saw any aligned data during training and was always optimizing the reconstruction of the orginal waveform. These experiments suggest that the encoder has factored out speaker-specific information in the encoded representations, as they have same meaning across different voice characteristics. This behaviour arises naturally because the decoder gets the speaker-id for free so the limited bandwith of latent codes gets used for other speaker-independent, phonetic information. In the paper we show that the latent codes discovered by the VQ-VAE are actually very closely related to the human-designed alphabet of phonemes."
"We show promising results on learning long term structure of environments for reinforcement learning."
posthttps://avdnoord.github.io/homepage/vqvae/ (demo)videohttps://youtu.be/QoCyQBzi7us?t=19m10s (Oord)videohttps://youtu.be/FMuvUZXMzKM?t=1h46m19s (Abbeel)noteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1711.00937slideshttps://avdnoord.github.io/homepage/slides/SANE2017.pdf
"Generating Diverse High-Fidelity Images with VQ-VAE-2" Razavi, Oord, Vinyals
VQ-VAE-2 VQ-VAE
"We explore the use of Vector Quantized Variational AutoEncoder (VQ-VAE) models for large scale image generation. To this end, we scale and enhance the autoregressive priors used in VQ-VAE to generate synthetic samples of much higher coherence and fidelity than possible before. We use simple feed-forward encoder and decoder networks, making our model an attractive candidate for applications where the encoding and/or decoding speed is critical. Additionally, VQ-VAE requires sampling an autoregressive model only in the compressed latent space, which is an order of magnitude faster than sampling in the pixel space, especially for large images. We demonstrate that a multi-scale hierarchical organization of VQ-VAE, augmented with powerful priors over the latent codes, is able to generate samples with quality that rivals that of state of the art Generative Adversarial Networks on multifaceted datasets such as ImageNet, while not suffering from GAN's known shortcomings such as mode collapse and lack of diversity."
"We scale and enhance the autoregressive priors used in VQ-VAE."
"We use simple feed-forward encoder and decoder networks, making our model an attractive candidate for applications where the encoding and/or decoding speed is critical."
"VQ-VAE requires sampling an autoregressive model only in the compressed latent space, which is an order of magnitude faster than sampling in the pixel space, especially for large images."
"A multi-scale hierarchical organization of VQ-VAE, augmented with powerful priors over the latent codes, is able to generate samples with quality that rivals that of state of the art GANs on multifaceted datasets such as ImageNet, while not suffering from GAN's known shortcomings such as mode collapse and lack of diversity."
"- Mean Squared Error loss on pixels
- non-autoregressive image decoder
- discrete latents w/ straight through estimator"
videohttps://youtu.be/QoCyQBzi7us?t=57m37s (Oord)videohttps://youtu.be/DSYzHPW26Ig?t=51m46s (Graves)videohttps://youtu.be/FMuvUZXMzKM?t=1h56m24s (Abbeel)posthttps://machinethoughts.wordpress.com/2019/06/25/the-inevitability-of-vector-quantization-in-deep-architecturesposthttps://openai.com/blog/jukebox
"Challenging Common Assumptions in the Unsupervised Learning of Disentangled Representations" Locatello, Bauer, Lucic, Gelly, Scholkopf, Bachem
unsupervised learning ICML 2019
"The key assumption is that real-world data is generated by a few explanatory factors of variation and that these factors can be recovered by unsupervised learning algorithms. A large number of unsupervised learning approaches based on auto-encoding and quantitative evaluation metrics of disentanglement have been proposed; yet, the efficacy of the proposed approaches and utility of proposed notions of disentanglement has not been challenged in prior work. In this paper, we provide a sober look on recent progress in the field and challenge some common assumptions."
"We first theoretically show that the unsupervised learning of disentangled representations is fundamentally impossible without inductive biases on both the models and the data. Then, we train more than 12 000 models covering the six most prominent methods, and evaluate them across six disentanglement metrics in a reproducible large-scale experimental study on seven different data sets. On the positive side, we observe that different methods successfully enforce properties “encouraged” by the corresponding losses. On the negative side, we observe that in our study (1) “good” hyperparameters seemingly cannot be identified without access to ground-truth labels, (2) good hyperparameters neither transfer across data sets nor across disentanglement metrics, and (3) that increased disentanglement does not seem to lead to a decreased sample complexity of learning for downstream tasks."
"We theoretically prove that (perhaps unsurprisingly) the unsupervised learning of disentangled representations is fundamentally impossible without inductive biases both on the considered learning approaches and the data sets."
"While the research community has proposed a variety of unsupervised approaches to learn disentangled representations based on variational autoencoders and has devised different metrics to quantify their level of disentanglement, to our knowledge no large-scale empirical study has evaluated these approaches in a unified manner. We propose a fair, reproducible experimental protocol to benchmark the state of unsupervised disentanglement learning by implementing six different state-of-the-art models (BetaVAE, AnnealedVAE, FactorVAE, DIP-VAE I/II and Beta-TCVAE) and six disentanglement metrics (BetaVAE score, FactorVAE score, MIG, SAP, Modularity and DCI Disentanglement). In total, we train and evaluate 12,800 such models on seven data sets."
"We do not find any empirical evidence that the considered models can be used to reliably learn disentangled representations in an unsupervised way, since random seeds and hyperparameters seem to matter more than the model choice. In other words, even if one trains a large number of models and some of them are disentangled, these disentangled representations seemingly cannot be identified without access to ground-truth labels. Furthermore, good hyperparameter values do not appear to consistently transfer across the data sets in our study. These results are consistent with the theorem we present in the paper, which states that the unsupervised learning of disentangled representations is impossible without inductive biases on both the data set and the models (i.e., one has to make assumptions about the data set and incorporate those assumptions into the model). For the considered models and data sets, we cannot validate the assumption that disentanglement is useful for downstream tasks, e.g., that with disentangled representations it is possible to learn with fewer labeled observations."
"The choice of random seed across different runs has a larger impact on disentanglement scores than the model choice and the strength of regularization (while naively one might expect that more regularization should always lead to more disentanglement). A good run with a bad hyperparameter can easily beat a bad run with a good hyperparameter."
"We evaluate our experimental results and challenge many common assumptions in unsupervised disentanglement learning: (i) While all considered methods prove effective at ensuring that the individual dimensions of the aggregated posterior (which is sampled) are not correlated, only one method also consistently ensures that the individual dimensions of the representation (which is taken to be the mean) are not correlated. (ii) We do not find any evidence that they can be used to reliably learn disentangled representations in an unsupervised manner as hyper parameters seem to matter more than the model and “good” hyperparameters seemingly cannot be identified without access to ground-truth labels. Similarly, we observe that good hyperparameters neither transfer across data sets nor across disentanglement metrics. (iii) For the considered models and data sets, we cannot validate the assumption that disentanglement is useful for downstream tasks, for example through a decreased sample complexity of learning."
"Based on these empirical evidence, we suggest three critical areas of further research: (i) The role of inductive biases and implicit and explicit supervision should be made explicit: unsupervised model selection persists as a key question. (ii) The concrete practical benefits of enforcing a specific notion of disentanglement of the learned representations should be demonstrated. (iii) Experiments should be conducted in a reproducible experimental setup on data sets of varying degrees of difficulty."
posthttps://ai.googleblog.com/2019/04/evaluating-unsupervised-learning-of.htmlvideohttps://slideslive.com/38915874/challenging-common-assumptions-in-the-unsupervised-learning-of-disentangled-representations (Locatello)videohttps://youtube.com/watch?v=WYrvh50yu6s (Kilcher)codehttps://github.com/google-research/disentanglement_lib
interesting recent papers
interesting recent papers - generative models
"This paper shows how Long Short-term Memory recurrent neural networks can be used to generate complex sequences with long-range structure, simply by predicting one data point at a time. The approach is demonstrated for text (where the data are discrete) and online handwriting (where the data are real-valued). It is then extended to handwriting synthesis by allowing the network to condition its predictions on a text sequence. The resulting system is able to generate highly realistic cursive handwriting in a wide variety of styles."
"Recurrent neural networks are a rich class of dynamic models that have been used to generate sequences in domains as diverse as music, text and motion capture data. RNNs can be trained for sequence generation by processing real data sequences one step at a time and predicting what comes next. Assuming the predictions are probabilistic, novel sequences can be generated from a trained network by iteratively sampling from the network's output distribution, then feeding in the sample as input at the next step. In other words, by making the network treat its inventions as if they were real, much like a person dreaming. Although the network itself is deterministic, the stochasticity injected by picking samples induces a distribution over sequences. This distribution is conditional, since the internal state of the network, and hence its predictive distribution, depends on the previous inputs. RNNs are ‘fuzzy’ in the sense that they do not use exact templates from the training data to make predictions, but rather - like other neural networks - use their internal representation to perform a high-dimensional interpolation between training examples. This distinguishes them from n-gram models and compression algorithms such as Prediction by Partial Matching, whose predictive distributions are determined by counting exact matches between the recent history and the training set. The result - which is immediately apparent from the samples in this paper - is that RNNs (unlike template-based algorithms) synthesise and reconstitute the training data in a complex way, and rarely generate the same thing twice. Furthermore, fuzzy predictions do not suffer from the curse of dimensionality, and are therefore much better at modelling real-valued or multivariate data than exact matches."
"In principle a large enough RNN should be sufficient to generate sequences of arbitrary complexity. In practice however, standard RNNs are unable to store information about past inputs for very long. As well as diminishing their ability to model long-range structure, this ‘amnesia’ makes them prone to instability when generating sequences. The problem (common to all conditional generative models) is that if the network’s predictions are only based on the last few inputs, and these inputs were themselves predicted by the network, it has little opportunity to recover from past mistakes. Having a longer memory has a stabilising effect, because even if the network cannot make sense of its recent history, it can look further back in the past to formulate its predictions. The problem of instability is especially acute with real-valued data, where it is easy for the predictions to stray from the manifold on which the training data lies. One remedy that has been proposed for conditional models is to inject noise into the predictions before feeding them back into the model, thereby increasing the model’s robustness to surprising inputs. However we believe that a better memory is a more profound and effective solution."
- http://distill.pub/2016/handwriting/ (demo)
- http://www.cs.toronto.edu/~graves/handwriting.html (demo)
videohttp://youtube.com/watch?v=-yX1SYeDHbg (Graves)videohttps://youtu.be/Q57rzaHHO0k?t=32m31s (Graves)noteshttps://github.com/tensorflow/magenta/blob/master/magenta/reviews/summary_generation_sequences.mdposthttp://blog.otoro.net/2015/12/12/handwriting-generation-demo-in-tensorflow/codehttps://github.com/hardmaru/write-rnn-tensorflow
"Deep AutoRegressive Networks" Gregor, Danihelka, Mnih, Blundell, Wierstra
"We introduce a deep, generative autoencoder capable of learning hierarchies of distributed representations from data. Successive deep stochastic hidden layers are equipped with autoregressive connections, which enable the model to be sampled from quickly and exactly via ancestral sampling. We derive an efficient approximate parameter estimation method based on the minimum description length (MDL) principle, which can be seen as maximising a variational lower bound on the log-likelihood, with a feedforward neural network implementing approximate inference. We demonstrate state-of-the-art generative performance on a number of classic data sets: several UCI data sets, MNIST and Atari 2600 games."
"In this paper we introduced deep autoregressive networks, a new deep generative architecture with autoregressive stochastic hidden units capable of capturing high-level structure in data to generate high-quality samples. The method, like the ubiquitous autoencoder framework, is comprised of not just a decoder (the generative element) but a stochastic encoder as well to allow for efficient and tractable inference. Training proceeds by backpropagating an MDL cost through the joint model, which approximately equates to minimising the Helmholtz variational free energy. This procedure necessitates backpropagation through stochastic units, as such yielding an approximate Monte Carlo method. The model samples efficiently, trains efficiently and is scalable to locally connected and/or convolutional architectures."
"Directed generative models provide a fully probabilistic account of observed random variables and their latent representations. Typically either the mapping from observation to representation or representation to observation is intractable and hard to approximate efficiently. In contrast, autoencoders provide an efficient two-way mapping where an encoder maps observations to representations and a decoder maps representations back to observations. Recently several authors have developed probabilistic versions of regularised autoencoders, along with means of generating samples from such models. These sampling procedures are often iterative, producing correlated approximate samples from previous approximate samples, and as such explore the full distribution slowly, if at all. In this paper, we introduce deep generative autoencoders that in contrast to the aforementioned models efficiently generate independent, exact samples via ancestral sampling. To produce a sample, we simply perform a top-down pass through the decoding part of our model, starting at the deepest hidden layer and sampling one unit at a time, layer-wise. Training a DARN proceeds by minimising the total information stored for reconstruction of the original input, and as such follows the minimum description length principle. This amounts to backpropagating an MDL cost through the entire joint encoder/decoder. Learning to encode and decode observations according to a compression metric yields representations that can be both concise and irredundant from an information theoretic point of view. Due to the equivalence of compression and prediction, compressed representations are good for making predictions and hence also good for generating samples. Unlike many other variational learning algorithms, our algorithm is not an expectation maximisation algorithm, but rather a stochastic gradient descent method, jointly optimising all parameters of the autoencoder simultaneously. DARN and its learning algorithm easily stack, allowing ever deeper representations to be learnt, whilst at the same time compressing the training data - DARN allows for alternating layers of stochastic hidden units and deterministic non-linearities. Recently, several authors have exploited autoregression for distribution modelling. Unlike these models, DARN can have stochastic hidden units, and places autoregressive connections among these hidden units. Depending upon the architecture of the network, this can yield gains in both statistical and computational efficiency."
"When compared to sigmoid belief networks that make use of mean-field approximations, deep auto-regressive networks use a posterior approximation with an autoregressive dependency structure that provides a clear improvement in performance."
videohttps://youtu.be/-yX1SYeDHbg?t=49m25s + https://youtu.be/P78QYjWh5sM?t=20m50s (demo)videohttp://techtalks.tv/talks/deep-autoregressive-networks/60884/ (Gregor)videohttp://youtube.com/watch?v=P78QYjWh5sM (Gregor)videohttp://techtalks.tv/beta/talks/neural-variational-inference-and-learning-in-belief-networks/60886/ (Mnih)
"MADE: Masked Autoencoder for Distribution Estimation" Germain, Gregor, Murray, Larochelle
"There has been a lot of recent interest in designing neural network models to estimate a distribution from a set of examples. We introduce a simple modification for autoencoder neural networks that yields powerful generative models. Our method masks the autoencoder’s parameters to respect autoregressive constraints: each input is reconstructed only from previous inputs in a given ordering. Constrained this way, the autoencoder outputs can be interpreted as a set of conditional probabilities, and their product, the full joint probability. We can also train a single network that can decompose the joint probability in multiple different orderings. Our simple framework can be applied to multiple architectures, including deep ones. Vectorized implementations, such as on GPUs, are simple and fast. Experiments demonstrate that this approach is competitive with state-of-the-art tractable distribution estimators. At test time, the method is significantly faster and scales better than other autoregressive estimators."
"We proposed MADE, a simple modification of autoencoders allowing them to be used as distribution estimators. MADE demonstrates that it is possible to get direct, cheap estimates of a high-dimensional joint probabilities, from a single pass through an autoencoder. Like standard autoencoders, our extension is easy to vectorize and implement on GPUs. MADE can evaluate high-dimensional probably distributions with better scaling than before, while maintaining state-of-the-art statistical performance."
videohttp://videolectures.net/icml2015_germain_distribution_estimation/ (Germain)videohttp://www.fields.utoronto.ca/video-archive/2017/01/2267-16372 (Larochelle)videohttp://videolectures.net/deeplearning2015_larochelle_deep_learning/ (Larochelle)posthttps://lilianweng.github.io/lil-log/2018/10/13/flow-based-deep-generative-models.html#madeposthttp://bjlkeng.github.io/posts/autoregressive-autoencoders/posthttp://inference.vc/masked-autoencoders-icml-paper-highlight/noteshttps://casmls.github.io/general/2016/11/19/MADENADE.htmlcodehttps://github.com/ikostrikov/pytorch-flowscodehttps://github.com/karpathy/pytorch-made
"Neural Autoregressive Distribution Estimation" Uria, Cote, Gregor, Murray, Larochelle
"We present Neural Autoregressive Distribution Estimation (NADE) models, which are neural network architectures applied to the problem of unsupervised distribution and density estimation. They leverage the probability product rule and a weight sharing scheme inspired from restricted Boltzmann machines, to yield an estimator that is both tractable and has good generalization performance. We discuss how they achieve competitive performance in modeling both binary and real-valued observations. We also present how deep NADE models can be trained to be agnostic to the ordering of input dimensions used by the autoregressive product rule decomposition. Finally, we also show how to exploit the topological structure of pixels in images using a deep convolutional architecture for NADE."
videohttp://www.fields.utoronto.ca/video-archive/2017/01/2267-16372 (Larochelle)noteshttps://casmls.github.io/general/2016/11/19/MADENADE.html
"DRAW: A Recurrent Neural Network For Image Generation" Gregor, Danihelka, Graves, Wierstra
"This paper introduces the Deep Recurrent Attentive Writer neural network architecture for image generation. DRAW networks combine a novel spatial attention mechanism that mimics the foveation of the human eye, with a sequential variational auto-encoding framework that allows for the iterative construction of complex images. The system substantially improves on the state of the art for generative models on MNIST, and, when trained on the Street View House Numbers dataset, it generates images that cannot be distinguished from real data with the naked eye."
"The core of the DRAW architecture is a pair of recurrent neural networks: an encoder network that compresses the real images presented during training, and a decoder that reconstitutes images after receiving codes. The combined system is trained end-to-end with stochastic gradient descent, where the loss function is a variational upper bound on the log-likelihood of the data. It therefore belongs to the family of variational auto-encoders, a recently emerged hybrid of deep learning and variational inference that has led to significant advances in generative modelling. Where DRAW differs from its siblings is that, rather than generating images in a single pass, it iteratively constructs scenes through an accumulation of modifications emitted by the decoder, each of which is observed by the encoder."
"An obvious correlate of generating images step by step is the ability to selectively attend to parts of the scene while ignoring others. A wealth of results in the past few years suggest that visual structure can be better captured by a sequence of partial glimpses, or foveations, than by a single sweep through the entire image. The main challenge faced by sequential attention models is learning where to look, which can be addressed with reinforcement learning techniques such as policy gradients. The attention model in DRAW, however, is fully differentiable, making it possible to train with standard backpropagation. In this sense it resembles the selective read and write operations developed for the Neural Turing Machine."
"We also established that the two-dimensional differentiable attention mechanism embedded in DRAW is beneficial not only to image generation, but also to cluttered image classification."
videohttp://youtube.com/watch?v=Zt-7MI9eKEo (demo)videohttp://youtube.com/watch?v=P78QYjWh5sM&t=22m14s (Gregor)videohttp://videolectures.net/deeplearning2015_courville_autoencoder_extension/#t=4380 (Courville)videohttps://youtu.be/Q57rzaHHO0k?t=1h33m50s (Graves)posthttp://kvfrans.com/what-is-draw-deep-recurrent-attentive-writer/posthttp://blog.evjang.com/2016/06/understanding-and-implementing.htmlnoteshttp://github.com/tensorflow/magenta/blob/master/magenta/reviews/draw.mdnoteshttps://casmls.github.io/general/2016/10/16/attention_model.htmlnoteshttp://www.shortscience.org/paper?bibtexKey=conf/icml/GregorDGRW15codehttps://github.com/ikostrikov/TensorFlow-VAE-GAN-DRAW/blob/master/main-draw.pycodehttps://github.com/ericjang/draw
"Normalizing Flows for Probabilistic Modeling and Inference" Papamakarios, Nalisnick, Rezende, Mohamed, Lakshminarayanan
"Normalizing flows provide a general mechanism for defining expressive probability distributions, only requiring the specification of a (usually simple) base distribution and a series of bijective transformations. There has been much recent work on normalizing flows, ranging from improving their expressive power to expanding their application. We believe the field has now matured and is in need of a unified perspective. In this review, we attempt to provide such a perspective by describing flows through the lens of probabilistic modeling and inference. We place special emphasis on the fundamental principles of flow design, and discuss foundational topics such as expressive power and computational trade-offs. We also broaden the conceptual framing of flows by relating them to more general probability transformations. Lastly, we summarize the use of flows for tasks such as generative modeling, approximate inference, and supervised learning."
"Density Estimation using Real NVP" Dinh, Sohl-Dickstein, Bengio
Real NVP
"Unsupervised learning of probabilistic models is a central yet challenging problem in machine learning. Specifically, designing models with tractable learning, sampling, inference and evaluation is crucial in solving this task. We extend the space of such models using real-valued non-volume preserving (real NVP) transformations, a set of powerful invertible and learnable transformations, resulting in an unsupervised learning algorithm with exact log-likelihood computation, exact sampling, exact inference of latent variables, and an interpretable latent space. We demonstrate its ability to model natural images on four datasets through sampling, log-likelihood evaluation and latent variable manipulations."
"Real-valued Non Volume Preserving transform:
- one-pass and exact inference and sampling
- explicit learning of a latent representation
- tractable log-likelihood
- coherent and sharp samples"
- https://laurent-dinh.github.io/2016/07/12/real-nvp-visualization.html (demo)
videohttps://slideslive.com/38917907/tutorial-on-normalizing-flows?t=755 (Jang)videohttps://channel9.msdn.com/events/Neural-Information-Processing-Systems-Conference/Neural-Information-Processing-Systems-Conference-NIPS-2016/Deep-Learning-Symposium-Session-1 (08:19) (Dinh)videohttps://periscope.tv/hugo_larochelle/1ypKdAVmbEpGW (Dinh)videohttps://cds.cern.ch/record/2302480 (43:54) (Rezende)videohttps://youtu.be/v4gp1dMvWJo?t=43m20s (Ashukha)posthttp://blog.evjang.com/2018/01/nf2.htmlposthttp://akosiorek.github.io/ml/2018/04/03/norm_flows.htmlposthttps://lilianweng.github.io/lil-log/2018/10/13/flow-based-deep-generative-models.html#realnvpnoteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1605.08803codehttps://github.com/tensorflow/models/tree/master/research/real_nvpcodehttps://github.com/tensorflow/tensorflow/blob/master/tensorflow/contrib/distributions/python/ops/bijectors/real_nvp.pycodehttps://github.com/ikostrikov/pytorch-flows
interesting recent papers on compute and memory architectures
interesting recent papers on meta-learning
"Attention Is All You Need" Vaswani et al.
Transformer NIPS 2017
"The dominant sequence transduction models are based on complex recurrent or convolutional neural networks in an encoder-decoder configuration. The best performing models also connect the encoder and decoder through an attention mechanism. We propose a new simple network architecture, the Transformer, based solely on attention mechanisms, dispensing with recurrence and convolutions entirely. Experiments on two machine translation tasks show these models to be superior in quality while being more parallelizable and requiring significantly less time to train. Our model achieves 28.4 BLEU on the WMT 2014 English-to-German translation task, improving over the existing best results, including ensembles by over 2 BLEU. On the WMT 2014 English-to-French translation task, our model establishes a new single-model state-of-the-art BLEU score of 41.0 after training for 3.5 days on eight GPUs, a small fraction of the training costs of the best models from the literature. We show that the Transformer generalizes well to other tasks by applying it successfully to English constituency parsing both with large and limited training data."
"- constant path length between any two input positions
- gating/multiplication enables crisp error propagation
- trivial to parallelize
- can replace sequence-aligned recurrence entirely"
"multi-head attention:
- convolutions use different parameters per relative position
- allows identifying different information from different positions
- multiple attention layers in parallel achieve a similar effect
- projecting to fewer dimensions keeps computation ~ constant"
"trains >3x faster than GNMT and ConvSeq2Seq with better performance on machine translation problem"
"n - sequence length, d - representation dimension, k - convolution kernel size, r - neighborhood size
complexity per layer:
- self-attention: O(n^2*d)
- recurrent: O(n*d^2)
- convolutional: O(knd^2)
- self-attention (restricted): O(rnd)
sequential operations:- self-attention: O(1)
- recurrent: O(n)
- convolutional: O(1)
- self-attention (restricted): O(1)
maximum path integral:- self-attention: O(1)
- recurrent: O(n)
- convolutional: O(logk(n))
- self-attention (restricted): O(n/r)"
"The key innovation in Transformers is the introduction of a self-attention mechanism, which can be evaluated in parallel for each token of the input sequence, eliminating the sequential dependency in recurrent neural networks, like LSTM. This parallelism enables Transformers to leverage the full power of modern SIMD hardware accelerators like GPUs/TPUs, thereby facilitating training of NLP models on datasets of unprecedented size."
"The self-attention mechanism overcomes constraints of RNNs (namely the sequential nature of RNN) by allowing each token in the input sequence to attend independently to every other token in the sequence. This design choice has several interesting repercussions. In particular, the full self-attention have computational and memory requirement that is quadratic in the sequence length. Using commonly available current hardware and model sizes, this requirement translates to roughly being able to handle input sequences of length 512 tokens. This reduces its direct applicability to tasks that require larger context, like question answering, document summarization, etc."
"Transformer networks take attention to its logical extreme: get rid of everything else (recurrent state, convolutions, external memory) and just use attention to repeatedly transform a complete sequence. Instead of a controller emitting a query, every vector in the input sequence is compared with every other: anarchist attention?"
"Transformer models are seq2seq models that differ from classical seq2seq architectures in the sense that they are not auto-regressive and do not make use of single-dimensional convolutions. They have proven useful in several domains, mainly due to the absence of locality bias and to the O(1) path length between pairs of distinct sequence elements. As a side-note, the O(1) number of sequential operations between elements is not always guaranteed. Indeed, for computational performance purposes, a limit is imposed on the size of the self-attentional window, thus very long sequences break this assumption."
"Capsules is the theory of how you do visual perception using reconstruction, and also how you route information to the right places. In standard neural nets, the information, the activity in the layer, just automatically goes somewhere; you don't decide where to send it. The idea of capsules was to make decisions about where to send information. Now, since I started working on capsules, some other very smart people at Google invented transformers, which are doing the same thing. They're deciding where to route information, and that's a big win."
"The associative memory mechanisms in transformers are energy-based models. Associate memory associates perturbed memories with attractor states corresponding to learned patterns. The original Hopfield Network attempts to imitate neural associative memory with Hebb's Rule and is limited to fixed-length binary inputs, accordingly. Modern approaches have generalized the energy minimization approach of Hopfield Nets to overcome those and other hurdles. Modern continuous Hopfield Network's' update rule aligns well with key-value attention mechanisms from Transformers."
"Hopfield construction would allow iterating the attention, which Transformer doesn't do as it does the attention in a single step, but the authors find that iterating the Hopfield attention doesn't seem to be useful as it converges in a single step. The Hopfield layer also has beta in place of Transformer's 1/sqrt(d_k) scaling factor, and the authors note that this factor has a significant effect on the Hopfield network attraction point types, so it might lead to future understanding about what is the optimal value for this. Regardless they use the scaling factor from Transformer, 1/sqrt(d_k) in all the experiments."
posthttps://research.googleblog.com/2017/08/transformer-novel-neural-network.htmlvideohttps://youtube.com/watch?v=bYmeuc5voUQ (Vaswani)videohttps://facebook.com/nipsfoundation/videos/1554654864625747?t=1107 (Vaswani, Shazeer)videohttps://youtu.be/I0nX4HDmXKc?t=7m46s (Polosukhin)videohttps://youtube.com/watch?v=rBCqOTEfxvg (Kaiser)videohttps://youtu.be/-fdexQBpRas?t=26m9s (Vinyals)videohttps://youtu.be/8zAP2qWAsKg?t=22m39s (Hill)videohttps://youtube.com/watch?v=iDulhoQ2pro (Kilcher)videohttps://youtube.com/watch?v=tstbZXNCfLY (Raschka)videohttps://youtu.be/AIiwuClvH6k?t=1h14m (Graves)videohttps://youtube.com/watch?v=HsYPiKDTikg (Li)videohttps://youtube.com/watch?v=S0KakHcj_rs (Palermo)videohttps://youtube.com/watch?v=KMY2Knr4iAs (Chen)videohttps://youtu.be/ehNGGYFO6ms?t=48m18s (Szegedy)videohttps://youtube.com/watch?v=_soUrFPuyzc (Sapunov)videohttps://youtube.com/watch?v=Ydji_zg2gwU (Lakhman)in russianvideohttps://youtube.com/watch?v=XLNZ0wG3fQw (Burkov)in russianvideohttps://youtube.com/watch?v=pgBHnimRPzQ (Nikolenko)in russianvideohttps://youtu.be/IWHa_mIE8yA?t=1h56m29s (Gorbachev)in russianvideohttps://youtube.com/watch?v=YQZRsowJZA8 (Lyalin)in russianvideohttps://youtube.com/watch?v=KMgJFptbNlM (Lyalin)in russianvideohttps://youtube.com/watch?v=qfOk7IWDoDY (Chumachenko)in russianvideohttps://youtube.com/watch?v=atSqU9HfJq0 (Malykh)in russianvideohttps://youtube.com/watch?v=Bg8Y5q1OiP0 + https://youtube.com/watch?v=7I_D2EOxwwI (Neychev)in russianvideohttps://youtube.com/watch?v=UETKUIlYE6g (Neychev)in russianvideohttps://youtube.com/watch?v=ONuRVpJSvfY (Alexeev)in russianvideohttps://youtu.be/JO-RJRCkLvM?t=1m16s (Lobacheva)in russianvideohttps://youtu.be/_XRBlhzb31U?t=48m35s (Figurnov)in russianvideohttps://youtu.be/LhH6wMvntSM?t=54m56s (Suleymanov)in russianvideohttps://youtube.com/watch?v=8dN6ZVnDArk (Sapunov)in russianvideohttps://youtube.com/watch?v=7e4LxIVENZA (Sapunov)in russianvideohttps://youtube.com/watch?v=znyvj3ijl7Q (Sapunov)in russianvideohttps://youtube.com/watch?v=KZ9NXYcXVBY (Sapunov)in russianvideohttps://youtube.com/watch?v=f544TipD2QY + https://youtube.com/watch?v=WL6UviEG3XA + https://youtube.com/watch?v=zhsUpUFClEU (Astakhov)in russianvideohttps://youtube.com/watch?v=2YScoz4uBm8 (Astakhov)in russianaudiohttps://soundcloud.com/nlp-highlights/36-attention-is-all-you-need-with-ashish-vaswani-and-jakob-uszkoreit (Vaswani, Uszkoreit)posthttps://people.idsia.ch/~juergen/fast-weight-programmer-1991-transformer.htmlposthttps://lilianweng.github.io/lil-log/2020/04/07/the-transformer-family.htmlposthttps://jalammar.github.io/illustrated-transformer/posthttps://danieltakeshi.github.io/2019/03/30/transformers/posthttp://nlp.seas.harvard.edu/2018/04/03/attention.htmlposthttps://machinethoughts.wordpress.com/2017/09/01/deep-meaning-beyond-thought-vectors/posthttps://medium.com/@adityathiruvengadam/transformer-architecture-attention-is-all-you-need-aeccd9f50d09posthttps://staff.fnwi.uva.nl/s.abnar/?p=108posthttp://peterbloem.nl/blog/transformersposthttps://towardsdatascience.com/transformers-are-graph-neural-networks-bca9f75412aaposthttps://thegradient.pub/transformers-are-graph-neural-networksnoteshttps://ricardokleinklein.github.io/2017/11/16/Attention-is-all-you-need.htmlnoteshttps://blog.tomrochette.com/machine-learning/papers/ashish-vaswani-attention-is-all-you-neednoteshttps://medium.com/@sharaf/a-paper-a-day-24-attention-is-all-you-need-26eb2da90a91codehttps://github.com/tensorflow/tensor2tensor/blob/master/tensor2tensor/models/transformer.pycodehttps://colab.research.google.com/notebook#fileId=/v2/external/notebooks/t2t/hello_t2t.ipynbpaper"Linear Transformers Are Secretly Fast Weight Memory Systems" by Schlag, Irie, Schmidhuber (post, overviewvideo)paper"Hopfield Networks is All You Need" by Ramsauer et al. (post, overview (Kilcher)video)paper"Exploring the Limits of Transfer Learning with a Unified Text-to-Text Transformer" by Raffel et al.summarypaper"BERT: Pre-training of Deep Bidirectional Transformers for Language Understanding" by Devlin et al.summarypaper"Language Models are Unsupervised Multitask Learners" by Radford et al.summarypaper"An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale"paper(overview by Kilchervideo)
GLOM Capsule Networks
"This paper does not describe a working system. Instead, it presents a single idea about representation which allows advances made by several different groups to be combined into an imaginary system called GLOM. The advances include transformers, neural fields, contrastive representation learning, distillation and capsules. GLOM answers the question: How can a neural network with a fixed architecture parse an image into a part-whole hierarchy which has a different structure for each image? The idea is simply to use islands of identical vectors to represent the nodes in the parse tree. If GLOM can be made to work, it should significantly improve the interpretability of the representations produced by transformer-like systems when applied to vision or language."
videohttps://youtube.com/watch?v=ygInBb1fS9Y (Hinton)videohttps://youtube.com/watch?v=eEXnJOHQ_Xw (Hinton)videohttps://youtube.com/watch?v=cllFzkvrYmE (Kilcher)videohttps://youtube.com/watch?v=fkqiQuD6k8k (Lewis)
"Stacked Capsule Autoencoders" Kosiorek, Sabour, Teh, Hinton
Capsule Networks NeurIPS 2019
"An object can be seen as a geometrically organized set of interrelated parts. A system that makes explicit use of these geometric relationships to recognize objects should be naturally robust to changes in viewpoint, because the intrinsic geometric relationships are viewpoint-invariant. We describe an unsupervised version of capsule networks, in which a neural encoder, which looks at all of the parts, is used to infer the presence and poses of object capsules. The encoder is trained by backpropagating through a decoder, which predicts the pose of each already discovered part using a mixture of pose predictions. The parts are discovered directly from an image, in a similar manner, by using a neural encoder, which infers parts and their affine transformations. The corresponding decoder models each image pixel as a mixture of predictions made by affine-transformed parts. We learn object- and their part-capsules on unlabeled data, and then cluster the vectors of presences of object capsules. When told the names of these clusters, we achieve state-of-the-art results for unsupervised classification on SVHN (55%) and near state-of-the-art on MNIST (98.5%)."
"Problems with CNNs:
- CNNS are designed to cope with translations of objects but they are not good at dealing with the other effects of a change of viewpoint, such as rotation or scaling.
- Using 4-D or 6-D maps instead of 2-D maps is too expensive.
- So CNNs are typically trained on many different viewpoints of each object. This is inefficient.
We want neural nets that generalize to new viewpoints as easily as people (or computer graphics).
- Convolutionals neural nets try to make the neural activities invariant to small changes in viewpoint by combining the activities within a pool.
- This is the wrong goal.
- It is motivated by the fact that the final label needs to be viewpoint-invariant.
It's better to aim for equivariance: changes in viewpoint lead to corresponding changes in neural activities.- In the perceptual system, it's the weights that code viewpoint-invariant knowledge of shape, not the neural activities.
- CNNs do not understand images in terms of objects and their parts.
- They do not have explicit internal representations of entities and their relationships.
Instead, the layers of a CNN just learn richer and richer descriptions of what is happening at each 2-D location in the image.- Each layer includes more and more contextual information in the description of what is happening at an image location.
CNNs do not recognize objects the same way as us. This leads to adversarial examples.
CNNs activate things by taking scalar product of activities in the layer below times some weights and that provides evidence and when there is enough added evidence things are known. There is a very different way to activate things by looking for coincidences.
Much of science depends on coincidences.
- The coincidence between the values of the two sides of an equation.
- The coincidence between theory and experiment.
- High-dimensional coincidences make very selective filters.
The types of neuron we currently use cannot do coincidence detection because they are activated by the scalar product of a weight vector with an activity vector.- It's better to be activated by the scalar product of two activity vectors.
- This makes neurons sensitive to covariance structure.
- CNNs do not use coordinate frames.
- People always assign intrinsic coordinate frames when they perceive shapes.
- This is a very important aspect of human perception that makes it very different from CNNs."
"Computer vision as inverse computer graphics
- Graphics programs use hierarchical models in which spatial structure is modeled by matrices that represent the transformation from a coordinate frame embedded in the whole to a coordinate frame embedded in each part.
- These matrices are totally viewpoint invariant.
- This representation makes it easy to compute the relationship between a part and the camera from the relationship between a whole and the camera. It's just a matrix multiply.
- It is crazy not to make use of this beautifully linear way to deal with viewpoint in neural nets."
"ICLR 2018 and NIPS 2017 versions of capsules used discriminative learning and used matrices to represent part-whole relationships. They are wrong.
NeurIPS 2019 version of capsules uses unsupervised learning and uses matrices to represent whole-part relationships. It is correct."
"A capsule represents the presence and the instantiation parameters of a multi-dimensional entity, for example, an object or a part of an object.
Capsules are an attempt to introduce more structure into neural networks in order to make them generalize better."
"A capsule is a group of neurons that learns to represent a familiar shape or part.
- It has a logistic unit that represents whether the shape exists in the current image.
- It has a matrix that represents its pose i.e. the geometrical relationship between the shape and the camera.
- It has a vector that represents other properties such as deformation, velocity, color, etc."
A capsule that represents an object can predict the poses of the parts of the object.
- The pose of a part is the pose of the object times a matrix that represents the coordinate tranform between the whole and the part.
- This matrix does not depend on viewpoint so it is a statistically efficient way to represent shape."
"In ICLR 2018 and NIPS 2017 versions of capsules we made each part vote for the pose of each object and looked for a cluster of votes that agreed. This is finicky:
- It requires iterative routing to ensure that the same part is not used by multiple objects.
- It won't work if the parts have less degrees of freedom than the whole objects."
"Multi-layer set transformer in NeurIPS 2019 version of capsules predicts wholes from all of the already discovered parts by looking for agreements.
First we use the set transformer to infer the existences, poses and deformations of the object capsules.
Then we backpropagate the derivatives of the log probability of each observed lower-level pose under the mixture model created by the predictions of the higher-level capsules.
The set transformer learns to predict which higher-level capsules are present and what the post of each capsule is, i.e. its position, size and orientation.
The set transformer takes all of the parts as input and outputs predictions for all of the objects.
Each part is represented by a vector and these vectors get transformed in each layer of the set transformer by influences coming from other vectors.
Once the vectors have been suitably transformed, additional processing is used to predict the objects."
posthttp://akosiorek.github.io/ml/2019/06/23/stacked_capsule_autoencoders.htmlvideohttps://youtu.be/N0ER1MC9cqM?t=2m22s (Hinton)videohttps://youtu.be/UX8OubxsY8w?t=3m8s (Hinton)videohttps://youtu.be/zRg3IuxaJ6I?t=27m49s (Sabour)noteshttps://medium.com/syncedreview/geoffrey-hintons-unsupervised-capsule-networks-achieve-sota-results-on-svhn-ffe05e871249paper"Set Transformer: A Framework for Attention-basedPermutation-Invariant Neural Networks" by Lee et al. (overview by Jungtaek Kimvideo)
"Matrix Capsules with EM Routing" Hinton, Sabour, Frosst
Capsule Networks ICLR 2018
"A capsule is a group of neurons whose outputs represent different properties of the same entity. Each layer in a capsule network contains many capsules [a group of capsules forms a capsule layer and can be used in place of a traditional layer in a neural net]. We describe a version of capsules in which each capsule has a logistic unit to represent the presence of an entity and a 4x4 matrix which could learn to represent the relationship between that entity and the viewer (the pose). A capsule in one layer votes for the pose matrix of many different capsules in the layer above by multiplying its own pose matrix by trainable viewpoint-invariant transformation matrices that could learn to represent part-whole relationships. Each of these votes is weighted by an assignment coefficient. These coefficients are iteratively updated for each image using the Expectation-Maximization algorithm such that the output of each capsule is routed to a capsule in the layer above that receives a cluster of similar votes. The transformation matrices are trained discriminatively by backpropagating through the unrolled iterations of EM between each pair of adjacent capsule layers. On the smallNORB benchmark, capsules reduce the number of test errors by 45% compared to the state-of-the-art. Capsules also show far more resistance to white box adversarial attack than our baseline convolutional neural network."
videohttps://youtu.be/x5Vxk9twXlE?t=30m46s (Hinton)videohttps://youtu.be/zRg3IuxaJ6I?t=22m35s (Sabour)videohttps://youtu.be/hYt3FcJUf6w?t=50m38s (Uziela)videohttps://youtube.com/watch?v=akq6PNnkKY8 (Ou)posthttps://jhui.github.io/2017/11/14/Matrix-Capsules-with-EM-routing-Capsule-Network/posthttps://gebob19.github.io/capsule-networksposthttps://towardsdatascience.com/demystifying-matrix-capsules-with-em-routing-part-1-overview-2126133a8457posthttps://staff.fnwi.uva.nl/s.abnar/?p=108noteshttps://blog.acolyer.org/2017/11/14/matrix-capsules-with-em-routing/codehttps://github.com/loretoparisi/CapsNet
"Dynamic Routing Between Capsules" Sabour, Frosst, Hinton
Capsule Networks NIPS 2017
"A capsule is a group of neurons whose activity vector represents the instantiation parameters of a specific type of entity such as an object or object part. We use the length of the activity vector to represent the probability that the entity exists and its orientation to represent the instantiation paramters. Active capsules at one level make predictions, via transformation matrices, for the instantiation parameters of higher-level capsules. When multiple predictions agree, a higher level capsule becomes active. We show that a discrimininatively trained, multi-layer capsule system achieves state-of-the-art performance on MNIST and is considerably better than a convolutional net at recognizing highly overlapping digits. To achieve these results we use an iterative routing-by-agreement mechanism: A lower-level capsule prefers to send its output to higher level capsules whose activity vectors have a big scalar product with the prediction coming from the lower-level capsule."
"Dynamic routing can be viewed as a parallel attention mechanism that allows each capsule at one level to attend to some active capsules at the level below and to ignore others. This should allow the model to recognize multiple objects in the image even if objects overlap. The routing-by-agreement should make it possible to use a prior about shape of objects to help segmentation and it should obviate the need to make higher-level segmentation decisions in the domain of pixels."
"For thirty years, the state-of-the-art in speech recognition used hidden Markov models with Gaussian mixtures as output distributions. These models were easy to learn on small computers, but they had a representational limitation that was ultimately fatal: The one-of-n representations they use are exponentially inefficient compared with, say, a recurrent neural network that uses distributed representations. To double the amount of information that an HMM can remember about the string it has generated so far, we need to square the number of hidden nodes. For a recurrent net we only need to double the number of hidden neurons.
Now that convolutional neural networks have become the dominant approach to object recognition, it makes sense to ask whether there are any exponential inefficiencies that may lead to their demise. A good candidate is the difficulty that convolutional nets have in generalizing to novel viewpoints. The ability to deal with translation is built in, but for the other dimensions of an affine transformation we have to chose between replicating feature detectors on a grid that grows exponentially with the number of dimensions, or increasing the size of the labelled training set in a similarly exponential way. Capsules avoid these exponential inefficiencies by converting pixel intensities into vectors of instantiation parameters of recognized fragments and then applying transformation matrices to the fragments to predict the instantiation parameters of larger fragments. Transformation matrices that learn to encode the intrinsic spatial relationship between a part and a whole constitute viewpoint invariant knowledge that automatically generalizes to novel viewpoints.
Capsules make a very strong representational assumption: At each location in the image, there is at most one instance of the type of entity that a capsule represents. This assumption eliminates the binding problem and allows a capsule to use a distributed representation (its activity vector) to encode the instantiation parameters of the entity of that type at a given location. This distributed representation is exponentially more efficient than encoding the instantiation parameters by activating a point on a high-dimensional grid and with the right distributed representation, capsules can then take full advantage of the fact that spatial relationships can be modelled by matrix multiplies.
Capsules use neural activities that vary as viewpoint varies rather than trying to eliminate viewpoint variation from the activities. This gives them an advantage over "normalization" methods like spatial transformer networks: They can deal with multiple different affine transformations of different objects or object parts at the same time.
Research on capsules is now at a similar stage to research on recurrent neural networks for speech recognition at the beginning of this century. There are fundamental representational reasons for believing that it is a better approach but it probably requires a lot more small insights before it can out-perform a highly developed technology. The fact that a simple capsules system already gives unparalleled performance at segmenting overlapping digits is an early indication that capsules are a direction worth exploring."
"Hinton says pooling in ConvNets (i.e. max. or avg. pooling) is bad because it introduces pose invariance by throwing away a bit of affine transformational information each time instead of separating it. This kind of pooling is also biologically implausible because we can determine the poses of objects very precisely. Hinton provides empirical evidence that our brains impose coordinate frames on objects and object parts to represent their poses. He concludes that, if this kind of coordinate frame representation is out of reach of a simple learning algorithm (such as backprop), then the brain likely has architectural features that help it learn to construct objects by part-whole relations using local coordinate frames in a hierarchical manner (which is pretty much how objects are constructed in computer graphics). Based on that he devises a new ConvNet architecture in which entities for objects and object parts are represented by capsules (which possibly correspond to cortical mini-columns). Each capsule basically learns to broadcast votes for the poses of the parent capsules by matrix multiplying its own pose with the learned affine relations to each parent capsules. A parent capsule then simply collects all votes and looks for agreements of just a handful of votes (a Hough transform). That is sufficient because the pose information is fairly high-dimensional, so just a few agreements would already be significant. Based on that, the capsule then sends again votes for the poses of entities it can be part of and so on."
"The core idea of capsules is that low level features predict the existence and pose of higher level features; collisions are non-coincidental. E.g. paw HERE predicts tiger THERE, nose HERE predicts tiger THERE, stripe HERE predicts tiger THERE - paw and nose and stripe predict tiger in the SAME PLACE! That's unlikely to be a coincidence, there's probably a tiger.
The core idea of pooling is that high level features are correlated with the existence of low-level features across sub-regions. E.g. I see a paw and a nose and a stripe - I guess we've got some tigers up in this. Even if the paw predicts a Tiger Rampant and the nose predicts a Tiger Face-On and the stripe predicts a Tiger Sideways. Hence CNN's disastrous vulnerability to adversarial stimuli."
"A fully connected layer would route the features based on their agreement with a learned weight vector. This defeats the intent of dynamic routing, the whole purpose of which is to route activations to capsules where they agree with other activations. It does the routing based on a fast iterative process in the forward pass, not a slow learning process like gradient descent."
"
- requires less training data
- position and pose information are preserved (equivarience)
- promising for image segmentation and object detection
- routing by agreement is great for overlapping objects (explaining away)
- capsule activations nicely map the hierarchy of parts
- offers robustness to affine transformations
- activation vectors are easier to interpret (rotation, thickness, skew)"
"Capsules is the theory of how you do visual perception using reconstruction, and also how you route information to the right places. In standard neural nets, the information, the activity in the layer, just automatically goes somewhere; you don't decide where to send it. The idea of capsules was to make decisions about where to send information. Now, since I started working on capsules, some other very smart people at Google invented transformers, which are doing the same thing. They're deciding where to route information, and that's a big win."
"The other thing that motivated capsules was coordinate frames. So when humans do visual, they're always using coordinate frames. If they impose the wrong coordinate frame on an object, they don't even recognize the object. So I'll give you a little task: Imagine a tetrahedron; it’s got a triangular base and three triangular faces, all equilateral triangles. Easy to imagine, right? Now imagine slicing it with a plane, so you get a square cross section. That's not so easy, right? Every time you slice, you get a triangle. It’s not obvious how you get a square. It's not at all obvious. Okay, but I'll give you the same shape described differently. I need your pen. Imagine the shape you get if you take a pen like that, another pen at right angles like this, and you connect all points on this pen to all points on this pen. That's a solid tetrahedron. OK, you're seeing it relative to a different coordinate frame, where the edges of the tetrahedron, these two line up with the coordinate frame. And for this, if you think of the tetrahedron that way, it's pretty obvious that at the top you've got a long rectangle this way, at the bottom we got a long rectangle that way, and there’s a square in the middle. So now it's pretty obvious how you can slice it to get a square, but only if you think of it with that coordinate frame. So it's obvious that for humans, coordinate frames are very important for perception."
- https://github.com/sekwiatkowski/awesome-capsule-networks
videohttps://youtube.com/watch?v=gq-7HgzfDBMvideohttps://youtube.com/watch?v=x5Vxk9twXlE (Hinton)videohttps://youtube.com/watch?v=zRg3IuxaJ6I (Sabour)videohttps://facebook.com/nipsfoundation/videos/1553634558061111?t=5824 (Frosst)videohttps://youtu.be/re-SRA5UZQw?t=48m28s (Hinton)video"What is wrong with convolutional neural nets?" (Hinton)video"What's wrong with convolutional nets?" (Hinton) (transcription)video"Does the Brain do Inverse Graphics?" (Hinton)videohttps://youtube.com/watch?v=nXGHJTtFYRU (Kilcher)videohttps://youtube.com/watch?v=pPN8d0E3900 (Geron)videohttps://youtube.com/watch?v=EATWLTyLfmc (Canziani)videohttps://youtube.com/watch?v=hYt3FcJUf6w (Uziela)videohttps://youtube.com/watch?v=1KwH0Z_6AhA&t=30m28s (Scarfe, Duggar, Stenlake)videohttps://youtu.be/3GnElTAUyiE?t=38m45s (Nikolenko)in russianvideohttps://youtu.be/7jxEn97hwlE?t=1h43m11s (Nikolenko)in russianvideohttps://youtube.com/watch?v=UZ9BgrofhKk (Kozlov)in russianvideohttps://youtube.com/watch?v=8R3gXmh1F0c (Lykov)in russianposthttps://oreilly.com/ideas/introducing-capsule-networksposthttps://gebob19.github.io/capsule-networksposthttps://medium.com/@pechyonkin/understanding-hintons-capsule-networks-part-i-intuition-b4b559d1159bposthttps://hackernoon.com/uncovering-the-intuition-behind-capsule-networks-and-inverse-graphics-part-i-7412d121798dposthttps://jhui.github.io/2017/11/03/Dynamic-Routing-Between-Capsules/posthttps://hackernoon.com/what-is-a-capsnet-or-capsule-network-2bfbe48769ccposthttps://medium.com/@mike_ross/a-visual-representation-of-capsule-network-computations-83767d79e737noteshttps://blog.acolyer.org/2017/11/13/dynamic-routing-between-capsules/codehttps://github.com/ageron/handson-ml/blob/master/extra_capsnets.ipynbcodehttps://github.com/Sarasra/models/tree/master/research/capsulescodehttps://github.com/loretoparisi/CapsNetpaper"Transforming Auto-encoders" by Hinton, Krizhevsky, Wangpaper"Optimizing Neural Networks that Generate Images" by Tieleman (code)
"Highway Networks" Srivastava, Greff, Schmidhuber
"There is plenty of theoretical and empirical evidence that depth of neural networks is a crucial ingredient for their success. However, network training becomes more difficult with increasing depth and training of very deep networks remains an open problem. In this extended abstract, we introduce a new architecture designed to ease gradient-based training of very deep networks. We refer to networks with this architecture as highway networks, since they allow unimpeded information flow across several layers on information highways. The architecture is characterized by the use of gating units which learn to regulate the flow of information through a network. Highway networks with hundreds of layers can be trained directly using stochastic gradient descent and with a variety of activation functions, opening up the possibility of studying extremely deep and efficient architectures."
"Highway Networks have a gated connection in the depth dimension analogous to the gated connection LSTMs have in the time dimension. There are also Grid LSTMs, which have these gated connections in both dimensions."
posthttps://people.idsia.ch/~juergen/highway-networks.htmlposthttp://people.idsia.ch/~rupesh/very_deep_learning/videohttp://research.microsoft.com/apps/video/default.aspx?id=259633 (9:00) (Srivastava)posthttps://medium.com/jim-fleming/highway-networks-with-tensorflow-1e6dfa667daanoteshttps://en.wikipedia.org/wiki/Highway_network
"Deep Residual Learning for Image Recognition" He, Zhang, Ren, Sun
ResNet CVPR 2016
"Deeper neural networks are more difficult to train. We present a residual learning framework to ease the training of networks that are substantially deeper than those used previously. We explicitly reformulate the layers as learning residual functions with reference to the layer inputs, instead of learning unreferenced functions. We provide comprehensive empirical evidence showing that these residual networks are easier to optimize, and can gain accuracy from considerably increased depth. On the ImageNet dataset we evaluate residual nets with a depth of up to 152 layers---8x deeper than VGG nets but still having lower complexity. An ensemble of these residual nets achieves 3.57% error on the ImageNet test set. This result won the 1st place on the ILSVRC 2015 classification task. We also present analysis on CIFAR-10 with 100 and 1000 layers. The depth of representations is of central importance for many visual recognition tasks. Solely due to our extremely deep representations, we obtain a 28% relative improvement on the COCO object detection dataset. Deep residual nets are foundations of our submissions to ILSVRC & COCO 2015 competitions, where we also won the 1st places on the tasks of ImageNet detection, ImageNet localization, COCO detection, and COCO segmentation."
"One solution for vanishing gradients is residual networks, which has been applied most famously to CNNs such that training neural networks hundreds of layers deep remains feasible. The idea is relatively simple. By default, we like the idea of a layer computing an identity function. This makes sense. If you do well with one layer, you don't expect a two or three to do worse. At worst, the second and third layer should just learn to "copy" the output of the first layer - no modifications. Hence, they just need to learn an identity function. Unfortunately, learning the identity function seems non-trivial for most networks. Even worse, later layers confuse training of earlier layers as the supervision signal - the direction it's meant to go - keeps shifting. As such, the first layer may fail to train well at all if there are more layers below it. To solve this, we bias the architecture of each of these layers towards performing the identity function. We can do this by only allowing the later layers to add deltas (updates) to the existing vector. Now, if the next layer is lazy and outputs nothing but zeroes, that's fine, as you'll still have the original vector."
"In a conventional MLP or convnet, only consecutive layers are compatible because of permutation symmetries: even if a layer doesn't do much useful computation, it still randomly permutes all its inputs, so if you take it out the next layer will get inputs shuffled in the wrong order. In a ResNet (or other passthrough network like a Highway Net or a feed-forward LSTM with untied weights), instead, all the hidden layers must use compatible representations."
"Highway Networks have a gated connection in the depth dimension analogous to the gated connection LSTMs have in the time dimension. But people are comparing deep residual networks to highway networks, saying it's like highway networks without the gate, with the path always open."
"There is a minor yet important difference between Highway Networks and ResNets. Highway type gating means it is a smooth but exclusive OR gate. ResNets are like AND gates."
videohttp://techtalks.tv/talks/deep-residual-networks-deep-learning-gets-way-deeper/62358/ (He)videohttp://youtube.com/watch?v=1PGLj-uKT1w (He)videohttps://youtube.com/watch?v=GWt6Fu05voI (Kilcher)videohttps://youtube.com/watch?v=sAzL4XMke80 (Shorten)videohttps://youtube.com/watch?v=jio04YvgraU (Hoveidar)posthttp://people.idsia.ch/~juergen/microsoft-wins-imagenet-through-feedforward-LSTM-without-gates.html (Schmidhuber)posthttps://blog.init.ai/residual-neural-networks-are-an-exciting-area-of-deep-learning-research-acf14f4912e9noteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/HeZRS15codehttps://github.com/tensorflow/models/tree/master/research/resnetpaper"Residual Networks are Exponential Ensembles of Relatively Shallow Networks" by Veit et al.
"Connectionist Temporal Classification: Labelling Unsegmented Sequence Data with Recurrent Neural Networks" Graves, Fernandez, Gomez, Schmidhuber
CTC
"Many real-world sequence learning tasks require the prediction of sequences of labels from noisy, unsegmented input data. In speech recognition, for example, an acoustic signal is transcribed into words or sub-word units. Recurrent neural networks are powerful sequence learners that would seem well suited to such tasks. However, because they require pre-segmented training data, and post-processing to transform their outputs into label sequences, their applicability has so far been limited. This paper presents a novel method for training RNNs to label unsegmented sequences directly, thereby solving both problems. An experiment on the TIMIT speech corpus demonstrates its advantages over both a baseline HMM and a hybrid HMM-RNN."
"CTC is a type of neural network output and associated scoring function, for training recurrent neural networks such as LSTM networks to tackle sequence problems where the timing is variable. It can be used for tasks like recognising phonemes in speech audio. CTC refers to the outputs and scoring, and is independent of the underlying neural network structure. A CTC network has a continuous output (e.g. softmax), which is fitted through training to model the probability of a label. The input is a sequence of observations, and the outputs are a sequence of labels, which can include blank outputs. CTC does not attempt to learn boundaries and timings: Label sequences are considered equivalent if they differ only in alignment, ignoring blanks. Equivalent label sequences can occur in many ways – which makes scoring a non-trivial task. Fortunately there is an efficient forward-backwards algorithm. CTC scores can then be used with the back-propagation algorithm to update the neural network weights."
"CTC reduces the “segmental” sequence label problem to a classical sequence labeling problem in which every position in an input sequence x is explicitly labeled by interpreting repetitions of input labels - or input labels followed by a special “blank” output symbol - as being a single label with a longer duration. During training, the marginal likelihood of the set of labelings compatible (according to the CTC interpretation rules) with the reference label y is maximized. Although CTC has been used successfully and its reuse of conventional sequence labeling architectures is appealing, it has several potentially serious limitations. First, it is not possible to model interlabel dependencies explicitly - these must instead be captured indirectly by the underlying RNNs. Second, CTC has no explicit segmentation model. Although this is most serious in applications where segmentation is a necessary/desired output (e.g., information extraction, protein secondary structure prediction), we argue that explicit segmentation is potentially valuable even when the segmentation is not required. To illustrate the value of explicit segments, consider the problem of phone recognition. For this task, segmental duration is strongly correlated with label identity (e.g., while an [o] phone token might last 300ms, it is unlikely that a [t] would) and thus modeling it explicitly may be useful. Finally, making an explicit labeling decision for every position (and introducing a special blank symbol) in an input sequence is conceptually unappealing."
videohttps://youtube.com/watch?v=e0ia-mN-7Kk (Ding, Brigden)videohttps://youtube.com/watch?v=GxtMbmv169o (Brigden)videohttps://youtube.com/watch?v=UMxvZ9qHwJs (Gharbieh)videohttps://youtube.com/watch?v=RZVEV-1rTLQ (Gupta)posthttps://distill.pub/2017/ctc/posthttps://machinethoughts.wordpress.com/2017/11/02/ctc-training-latent-discrete-sequential-decisions-without-rl/paper"Supervised Sequence Labelling with Recurrent Neural Networks" by Graves
"Sequence to Sequence Learning with Neural Networks" Sutskever, Vinyals, Le
seq2seq
"Deep Neural Networks are powerful models that have achieved excellent performance on difficult learning tasks. Although DNNs work well whenever large labeled training sets are available, they cannot be used to map sequences to sequences. In this paper, we present a general end-to-end approach to sequence learning that makes minimal assumptions on the sequence structure. Our method uses a multilayered Long Short-Term Memory to map the input sequence to a vector of a fixed dimensionality, and then another deep LSTM to decode the target sequence from the vector. Our main result is that on an English to French translation task from the WMT-14 dataset, the translations produced by the LSTM achieve a BLEU score of 34.7 on the entire test set, where the LSTM's BLEU score was penalized on out-of-vocabulary words. Additionally, the LSTM did not have difficulty on long sentences. For comparison, a strong phrase-based SMT system achieves a BLEU score of 33.3 on the same dataset. When we used the LSTM to rerank the 1000 hypotheses produced by the aforementioned SMT system, its BLEU score increases to 36.5, which beats the previous state of the art. The LSTM also learned sensible phrase and sentence representations that are sensitive to word order and are relatively invariant to the active and the passive voice. Finally, we found that reversing the order of the words in all source sentences (but not target sentences) improved the LSTM's performance markedly, because doing so introduced many short term dependencies between the source and the target sentence which made the optimization problem easier."
Geoffrey Hinton:
"You feed the sequence of words in an English sentence to the English encoder LSTM. The final hidden state of the encoder is the neural network's representation of the "thought" that the sentence expresses. You then make that thought be the initial state of the decoder LSTM for French. The decoder then outputs a probability distribution over French words that might start the sentence. If you pick from this distribution and make the word you picked be the next input to the decoder, it will then produce a probability distribution for the second word. You keep on picking words and feeding them back in until you pick a full stop. The process I just described defines a probability distribution across all French strings of words that end in a full stop. The log probability of a French string is just the sum of the log probabilities of the individual picks. To raise the log probability of a particular translation you just have to backpropagate the derivatives of the log probabilities of the individual picks through the combination of encoder and decoder. The amazing thing is that when an encoder and decoder net are trained on a fairly big set of translated pairs, the quality of the translations beats the former state-of-the-art for systems trained with the same amount of data. With more data and more research I'm pretty confident that the encoder-decoder pairs will take over in the next few years. There will be one encoder for each language and one decoder for each language and they will be trained so that all pairings work. One nice aspect of this approach is that it should learn to represent thoughts in a language-independent way and it will be able to translate between pairs of foreign languages without having to go via English. Another nice aspect is that it can take advantage of multiple translations. If a Dutch sentence is translated into Turkish and Polish and 23 other languages, we can backpropagate through all 25 decoders to get gradients for the Dutch encoder. This is like 25-way stereo on the thought. If 25 encoders and one decoder would fit on a chip, maybe it could go in your ear."
videohttp://research.microsoft.com/apps/video/?id=239083 (Sutskever)videohttp://youtube.com/watch?v=UdSK7nnJKHU (Sutskever)videohttp://youtube.com/watch?v=9U0drwafE78 (Vinyals)videohttp://youtube.com/watch?v=i2gzr1kXTxM (Vinyals)posthttp://jalammar.github.io/visualizing-neural-machine-translation-mechanics-of-seq2seq-models-with-attentionnoteshttp://www.shortscience.org/paper?bibtexKey=conf/nips/SutskeverVL14- https://google.github.io/seq2seq
"Pointer Networks" Vinyals, Fortunato, Jaitly
"We introduce a new neural architecture to learn the conditional probability of an output sequence with elements that are discrete tokens corresponding to positions in an input sequence. Such problems cannot be trivially addressed by existent approaches such as sequence-to-sequence and Neural Turing Machines, because the number of target classes in each step of the output depends on the length of the input, which is variable. Problems such as sorting variable sized sequences, and various combinatorial optimization problems belong to this class. Our model solves the problem of variable size output dictionaries using a recently proposed mechanism of neural attention. It differs from the previous attention attempts in that, instead of using attention to blend hidden units of an encoder to a context vector at each decoder step, it uses attention as a pointer to select a member of the input sequence as the output. We call this architecture a Pointer Net. We show Ptr-Nets can be used to learn approximate solutions to three challenging geometric problems - finding planar convex hulls, computing Delaunay triangulations, and the planar Travelling Salesman Problem - using training examples alone. Ptr-Nets not only improve over sequence-to-sequence with input attention, but also allow us to generalize to variable size output dictionaries. We show that the learnt models generalize beyond the maximum lengths they were trained on. We hope our results on these tasks will encourage a broader exploration of neural learning for discrete problems."
"We adapted the attention mechanism of the sequence-to-sequence framework to make it possible for the model to output pointers to inputs -- we call this architecture Pointer-Net. By doing so, we were able to approximately solve problems involving geometry such as small instances of the Traveling Salesman Problem or Delaunay triangulations solely from data. Our net naturally deals with variable sized problem instances, and generalizes well beyond what’s been trained on."
"We propose a new architecture, that we call Pointer Net, which is simple and effective. It deals with the fundamental problem of representing variable length dictionaries by using a softmax probability distribution as a “pointer”. We apply the Pointer Net model to three distinct non-trivial algorithmic problems involving geometry. We show that the learned model generalizes to test problems with more points than the training problems. Our Pointer Net model learns a competitive small scale (n<=50) TSP approximate solver. Our results demonstrate that a purely data driven approach can learn approximate solutions to problems that are computationally intractable."
"Our method works on variable sized inputs (yielding variable sized output dictionaries), something the baseline models (sequence-to-sequence with or without attention) cannot do directly. Even more impressively, they outperform the baselines on fixed input size problems - to which both the models can be applied. Our model draws inspiration from attention models and has strong connections to memory networks that use content based attention. We use these mechanisms to choose outputs from input locations, thus opening up a new class of problems to which neural networks can be applied without artificial assumptions. Future work will try and show its applicability to other problems such as sorting where the outputs are chosen from the inputs. We are also excited about the possibility of using this approach to other combinatorial optimization problems."
"Despite not having a memory, this model was able to solve a number of difficult algorithmic problems such as convex hull and approximate 2D TSP."
"In the pointer networks, the output space of the target sequence is constrained to be the observations in the input sequence (not the input space). And instead of having a fixed dimension softmax output layer, softmax outputs of varying dimension is dynamically computed for each input sequence in such a way to maximize the attention probability of the target input."
videohttp://youtube.com/watch?v=yS7rHi_lUGU (demo)videohttp://youtu.be/-fdexQBpRas?t=21m21s (Vinyals)videohttp://youtu.be/9U0drwafE78?t=44m30s (Vinyals)posthttp://fastml.com/introduction-to-pointer-networks/noteshttps://medium.com/@sharaf/a-paper-a-day-11-pointer-networks-59f7af1a611ccodehttps://github.com/ikostrikov/TensorFlow-Pointer-Networkscodehttps://github.com/devsisters/pointer-network-tensorflow
"End-To-End Memory Networks" Sukhbaatar, Szlam, Weston, Fergus
"We introduce a neural network with a recurrent attention model over a possibly large external memory. The architecture is a form of Memory Network but unlike the model in that work, it is trained end-to-end, and hence requires significantly less supervision during training, making it more generally applicable in realistic settings. It can also be seen as an extension of RNNsearch to the case where multiple computational steps (hops) are performed per output symbol. The flexibility of the model allows us to apply it to tasks as diverse as (synthetic) question answering and to language modeling. For the former our approach is competitive with Memory Networks, but with less supervision. For the latter, on the Penn TreeBank and Text8 datasets our approach demonstrates slightly better performance than RNNs and LSTMs. In both cases we show that the key concept of multiple computational hops yields improved results."
"In this work we showed that a neural network with an explicit memory and a recurrent attention mechanism for reading the memory can be sucessfully trained via backpropagation on diverse tasks from question answering to language modeling. Compared to the Memory Network implementation there is no supervision of supporting facts and so our model can be used in more realistic QA settings. Our model approaches the same performance of that model, and is significantly better than other baselines with the same level of supervision. On language modeling tasks, it slightly outperforms tuned RNNs and LSTMs of comparable complexity. On both tasks we can see that increasing the number of memory hops improves performance. However, there is still much to do. Our model is still unable to exactly match the performance of the memory networks trained with strong supervision, and both fail on several of the QA tasks. Furthermore, smooth lookups may not scale well to the case where a larger memory is required. For these settings, we plan to explore multiscale notions of attention or hashing."
videohttp://videolectures.net/deeplearning2016_chopra_attention_memory (Chopra)videohttp://www.fields.utoronto.ca/video-archive/2017/01/2267-16463 (00:49) (Fergus)videohttp://research.microsoft.com/apps/video/default.aspx?id=259920 (Sukhbaatar)videohttp://youtube.com/watch?v=8keqd1ewsno (Bordes)videohttp://youtube.com/watch?v=Xumy3Yjq4zk (Weston)videohttp://techtalks.tv/talks/memory-networks-for-language-understanding/62356/ (Weston)videohttp://youtu.be/jRkm6PXRVF8?t=17m51s (Weston)noteshttp://www.shortscience.org/paper?bibtexKey=conf/nips/SukhbaatarSWF15codehttps://github.com/fchollet/keras/blob/master/examples/babi_memnn.pycodehttps://github.com/carpedm20/MemN2N-tensorflowcodehttps://github.com/domluna/memn2n
"Learning to Transduce with Unbounded Memory" Grefenstette, Hermann, Suleyman, Blunsom
"Recently, strong results have been demonstrated by Deep Recurrent Neural Networks on natural language transduction problems. In this paper we explore the representational power of these models using synthetic grammars designed to exhibit phenomena similar to those found in real transduction problems such as machine translation. These experiments lead us to propose new memory-based recurrent networks that implement continuously differentiable analogues of traditional data structures such as Stacks, Queues, and DeQues. We show that these architectures exhibit superior generalisation performance to Deep RNNs and are often able to learn the underlying generating algorithms in our transduction experiments."
"The experiments performed in this paper demonstrate that single-layer LSTMs enhanced by an unbounded differentiable memory capable of acting, in the limit, like a classical Stack, Queue, or DeQue, are capable of solving sequence-to-sequence transduction tasks for which Deep LSTMs falter. Even in tasks for which benchmarks obtain high accuracies, the memory-enhanced LSTMs converge earlier, and to higher accuracies, while requiring considerably fewer parameters than all but the simplest of Deep LSTMs. We therefore believe these constitute a crucial addition to our neural network toolbox, and that more complex linguistic transduction tasks such as machine translation or parsing will be rendered more tractable by their inclusion."
"Machine translation is a prototypical example of transduction and recent results indicate that Deep RNNs have the ability to encode long source strings and produce coherent translations. While elegant, the application of RNNs to transduction tasks requires hidden layers large enough to store representations of the longest strings likely to be encountered, implying wastage on shorter strings and a strong dependency between the number of parameters in the model and its memory. In this paper we use a number of linguistically-inspired synthetic transduction tasks to explore the ability of RNNs to learn long-range reorderings and substitutions. Further, inspired by prior work on neural network implementations of stack data structures, we propose and evaluate transduction models based on Neural Stacks, Queues, and DeQues. Stack algorithms are well-suited to processing the hierarchical structures observed in natural language and we hypothesise that their neural analogues will provide an effective and learnable transduction tool. Our models provide a middle ground between simple RNNs and the recently proposed Neural Turing Machine which implements a powerful random access memory with read and write operations. Neural Stacks, Queues, and DeQues also provide a logically unbounded memory while permitting efficient constant time push and pop operations. Our results indicate that the models proposed in this work, and in particular the Neural DeQue, are able to consistently learn a range of challenging transductions. While Deep RNNs based on Long Short-Term Memory cells can learn some transductions when tested on inputs of the same length as seen in training, they fail to consistently generalise to longer strings. In contrast, our sequential memory-based algorithms are able to learn to reproduce the generating transduction algorithms, often generalising perfectly to inputs well beyond those encountered in training."
"String transduction is central to many applications in NLP, from name transliteration and spelling correction, to inflectional morphology and machine translation. The most common approach leverages symbolic finite state transducers, with approaches based on context free representations also being popular. RNNs offer an attractive alternative to symbolic transducers due to their simple algorithms and expressive representations. However, as we show in this work, such models are limited in their ability to generalise beyond their training data and have a memory capacity that scales with the number of their trainable parameters."
"In a parallel effort to ours, researchers are exploring the addition of memory to recurrent networks. The NTM and Memory Networks provide powerful random access memory operations, whereas we focus on a more efficient and restricted class of models which we believe are sufficient for natural language transduction tasks. More closely related to our work [Joulin Mikolov], have sought to develop a continuous stack controlled by an RNN. Note that this model - unlike the work proposed here - renders discrete push and pop operations continuous by “mixing” information across levels of the stack at each time step according to scalar push/pop action values. This means the model ends up compressing information in the stack, thereby limiting it as it effectively loses the unbounded memory nature of traditional symbolic models."
"Here we investigate memory modules that act like Stacks/Queues/Deques: - Memory ”size” grows/shrinks dynamically - Continuous push/pop not affected by number of objects stored - Can capture unboundedly long range dependencies - Propagates gradient flawlessly
"Bounded memory is useful in many ways, not least because it enforces some resource-sensitivity in the controller, which in turn encourages the learning of usefully compressed representations. On the other hand, unbounded memory means you don't need to worry about memory size, which is one less data-dependent hyperparameter to worry about, and is useful for tasks where you cannot estimate the length of computation (dynamic environment, RL, etc)."
posterhttp://egrefen.com/docs/NIPSStackPoster.pdfvideohttp://videolectures.net/deeplearning2015_blunsom_memory_reading/ (Blunsom)posthttps://iamtrask.github.io/2016/02/25/deepminds-neural-stack-machine/codehttps://jasdeep06.github.io/posts/Neural-Stacks/
"Neural Turing Machines" Graves, Wayne, Danihelka
NTM
"We extend the capabilities of neural networks by coupling them to external memory resources, which they can interact with by attentional processes. The combined system is analogous to a Turing Machine or Von Neumann architecture but is differentiable end-to-end, allowing it to be efficiently trained with gradient descent. Preliminary results demonstrate that Neural Turing Machines can infer simple algorithms such as copying, sorting and associative recall from input and output examples."
"The researchers hoped that the NTM would invent a binary heap sort, but in fact it seemed to have invented a hash table. The vectors were stored in memory locations controlled by the priority and then read out in priority order to give a sorted list."
"NTM can learn basic algorithms from examples only, including copy, loop, sort, associative recall and dynamic N-Gram inference. We are now looking at more complex tasks, including reinforcement learning, graph algorithms and question answering."
- turn neural networks into 'differentialbe computers' by giving them read-write acces to external memory
- separate computation and memory in neural networks to be able to learn algorithmic patterns
architecture:
- controller - neural network (recurrent or feedforward)
- heads - (attention) select portions of the memory to read/write to them
- memory - 'everything is differentiable'
attention:
- addressing by content (associative lookup)
- addressing by location (controller outputs a shift kernel)
RNN with big memory matrix and a "head" and "gaze" which it can position/focus to do a blurry, differentiable analog of a "read from (or write to) memory
difference with LSTM - decoupling memory and computation
NTM can learn basic algorithms from examples only, including copy, loop, sort, associative recall and dynamic N-Gram inference
Geoffrey Hinton:
"Its very impressive that they can get an RNN to invent a sorting algorithm. Its the first time I've believed that deep learning would be able to do real reasoning in the not too distant future. There will be a lot of future work in making the NTM (or its descendants) learn much more complicated algorithms and it will probably have many applications."
videohttps://youtu.be/Q57rzaHHO0k?t=51m48s (Graves)videohttp://research.microsoft.com/apps/video/default.aspx?id=260037 (Graves)videohttps://youtu.be/AIiwuClvH6k?t=49m37s (Graves)videohttp://youtube.com/watch?v=otRoAQtc5Dk (Polykovskiy)posthttps://distill.pub/2016/augmented-rnns/noteshttp://rylanschaeffer.github.io/content/research/neural_turing_machine/main.htmlnoteshttp://blog.acolyer.org/2016/03/09/neural-turing-machines/codehttps://github.com/loudinthecloud/pytorch-ntmcodehttps://github.com/flomlo/ntm_keras/codehttps://github.com/carpedm20/NTM-tensorflow
DNC Differentiable Neural Computer
"Artificial neural networks are remarkably adept at sensory processing, sequence learning and reinforcement learning, but are limited in their ability to represent variables and data structures and to store data over long timescales, owing to the lack of an external memory. Here we introduce a machine learning model called a Differentiable Neural Computer (DNC), which consists of a neural network that can read from and write to an external memory matrix, analogous to the random-access memory in a conventional computer. Like a conventional computer, it can use its memory to represent and manipulate complex data structures, but, like a neural network, it can learn to do so from data. When trained with supervised learning, we demonstrate that a DNC can successfully answer synthetic questions designed to emulate reasoning and inference problems in natural language. We show that it can learn tasks such as finding the shortest path between specified points and inferring the missing links in randomly generated graphs, and then generalize these tasks to specific graphs such as transport networks and family trees. When trained with reinforcement learning, a DNC can complete a moving blocks puzzle in which changing goals are specified by sequences of symbols. Taken together, our results demonstrate that DNCs have the capacity to solve complex, structured tasks that are inaccessible to neural networks without external read–write memory."
"Taken together, the bAbI and graph tasks demonstrate that DNCs are able to process and reason about graph-structured data regardless of whether the links are implicit or explicit. Moreover, we have seen that the structure of the data source is directly reflected in the memory access procedures learned by the controller. The Mini-SHRDLU problem shows that a systematic use of memory also emerges when a DNC learns by reinforcement to act in pursuit of a set of symbolic goals. The theme connecting these tasks is the need to learn to represent and reason about the complex, quasi-regular structure embedded in data sequences. In each problem, domain regularities, such as the conventions for representing graphs, are invariant across all sequences shown; on the other hand, for any given sequence, a DNC must detect and capture novel variability as episodic variables in memory. This mixture of large-scale structure and microscopic variability is generic to many problems that confront a cognitive agent. For example, in visual scenes, stories and action plans, broad regularities bind together novel variation in any exemplar. Rooms statistically have chairs in them, but the shape and location of a particular chair in a room are variables. These variable values can be written to the external memory of a DNC, leaving the controller network free to concentrate on learning global regularities. Our experiments focused on relatively small-scale synthetic tasks, which have the advantage of being easy to generate and interpret. For such problems, memory matrices of up to 512 locations were sufficient. To tackle real-world data we will need to scale up to thousands or millions of locations, at which point the memory will be able to store more information than can be contained in the weights of the controller. Such systems should be able to continually acquire knowledge through exposure to large, naturalistic data sources, even without adapting network parameters. We aim to further develop DNCs to serve as representational engines for one-shot learning, scene understanding, language processing and cognitive mapping, capable of intuiting the variable structure and scale of the world within a single, generic model."
"The Neural Turing Machine was the predecessor to the DNC described in this work. It used a similar architecture of neural network controller with read–write access to a memory matrix, but differed in the access mechanism used to interface with the memory. In the NTM, content-based addressing was combined with location-based addressing to allow the network to iterate through memory locations in order of their indices (for example, location n followed by n + 1 and so on). This allowed the network to store and retrieve temporal sequences in contiguous blocks of memory. However, there were several drawbacks. First, the NTM has no mechanism to ensure that blocks of allocated memory do not overlap and interfere — a basic problem of computer memory management. Interference is not an issue for the dynamic memory allocation used by DNCs, which provides single free locations at a time, irrespective of index, and therefore does not require contiguous blocks. Second, the NTM has no way of freeing locations that have already been written to and, hence, no way of reusing memory when processing long sequences. This problem is addressed in DNCs by the free gates used for de-allocation. Third, sequential information is preserved only as long as the NTM continues to iterate through consecutive locations; as soon as the write head jumps to a different part of the memory (using content-based addressing) the order of writes before and after the jump cannot be recovered by the read head. The temporal link matrix used by DNCs does not suffer from this problem because it tracks the order in which writes were made."
"
- temporal link between successive records keeps track of order that writes happened
- controller can choose whether or not to write anything to memory each timestep
- same controller can do transitive reasoning (a new read conditioned on read from previous timestep) during inference time
- three attention types: content, temporal, allocation"
(learns to find shortest path in graph)
posthttps://deepmind.com/blog/differentiable-neural-computers/videohttps://youtube.com/watch?v=steioHoiEms (Graves)videohttps://facebook.com/iclr.cc/videos/1713144705381255?t=549 (Graves)videohttps://youtu.be/Q57rzaHHO0k?t=1h18m51s (Graves)videohttps://youtu.be/9z3_tJAu7MQ?t=3m16s (Wayne)videohttps://youtube.com/watch?v=PQrlOjj8gAc (Wayne)videohttps://youtu.be/otRoAQtc5Dk?t=59m56s (Polykovskiy)noteshttp://www.shortscience.org/paper?bibtexKey=10.1038/nature20101codehttps://github.com/deepmind/dnccodehttps://github.com/ixaxaar/pytorch-dnccodehttps://github.com/Mostafa-Samir/DNC-tensorflow
"Neural GPUs Learn Algorithms" Kaiser, Sutskever
"Learning an algorithm from examples is a fundamental problem that has been widely studied. Recently it has been addressed using neural networks, in particular by Neural Turing Machines. These are fully differentiable computers that use backpropagation to learn their own programming. Despite their appeal NTMs have a weakness that is caused by their sequential nature: they cannot be parallelized and are hard to train due to their large depth when unfolded. We present a neural network architecture to address this problem: the Neural GPU. It is based on a type of convolutional gated recurrent unit and, like the NTM, is computationally universal. Unlike the NTM, the Neural GPU is highly parallel which makes it easier to train and efficient to run. An essential property of algorithms is their ability to handle inputs of arbitrary size. We show that the Neural GPU can be trained on short instances of an algorithmic task and successfully generalize to long instances. We verified it on a number of tasks including long addition and long multiplication of numbers represented in binary. We train the Neural GPU on numbers with up to 20 bits and observe no errors whatsoever while testing it, even on much longer numbers. To achieve these results we introduce a technique for training deep recurrent networks: parameter sharing relaxation. We also found a small amount of dropout and gradient noise to have a large positive effect on learning and generalization."
"The results show clearly that there is a qualitative difference between what can be achieved with a Neural GPU and what was possible with previous archietctures. In particular, for the first time, we show a neural network that learns a non-trivial superlinear-time algorithm in a way that generalized to much higher lengths without errors. This opens the way to use neural networks in domains that were previously only addressed by discrete methods, such as program synthesis. With the surprising data efficiency of Neural GPUs it could even be possible to replicate previous program synthesis results but in a more scalable way. It is also interesting that a Neural GPU can learn symbolic algorithms without using any discrete state at all, and adding dropout and noise only improves its performance. Another promising future work is to apply Neural GPUs to language processing tasks. Good results have already been obtained on translation with a convolutional architecture over words and adding gating and recursion, like in a Neural GPU, should allow to train much deeper models without overfitting. Finally, the parameter sharing relaxation technique we introduced can be applied to any deep recurrent network and has the potential to improve RNN training in general."
"It turns out that despite its recent success the sequence-to-sequence model has limitations. In its basic architecture, the entire input is encoded into a single fixed-size vector, so the model cannot generalize to inputs much longer than this fixed capacity. One way to resolve this problem is by using an attention mechanism. This allows the network to inspect arbitrary parts of the input in every decoding step, so the basic limitation is removed. But other problems remain, and Joulin & Mikolov (2015) show a number of basic algorithmic tasks on which sequence-to-sequence LSTM networks fail to generalize."
"While the above definition is simple, it might not be immediately obvious what kind of functions a Neural GPU can compute. Why can we expect it to be able to perform long multiplication? To answer such questions it is useful to draw an analogy between a Neural GPU and a discrete 2-dimensional cellular automaton. Except for being discrete and the lack of a gating mechanism, such automata are quite similar to Neural GPUs. Of course, these are large exceptions. Dense representations have often more capacity than purely discrete states and the gating mechanism is crucial to avoid vanishing gradients during training. But the computational power of cellular automata is much better understood. In particular, it is well known that a cellular automaton can exploit its parallelism to multiply two n-bit numbers in O(n) steps using Atrubin’s algorithm."
"Neural Turing Machines are magnificient but they are sequential (= non parallelizeable) and deep (= hard to train)."
"Why are NTM so deep? At each step ("clock tick") the NTM can modify only one element in its memory. It takes many clock ticks to create a large structure in memory. Requires massive back propagation."
(learns to add and multiply long binary numbers without errors)
videohttps://youtube.com/watch?v=LzC8NkTZAF4 (demo)videohttps://youtube.com/watch?v=hVv4M0bTBJc (Sutskever)codehttps://github.com/tensorflow/models/tree/master/research/neural_gpucodehttps://github.com/tensorflow/tensor2tensor/blob/master/tensor2tensor/models/neural_gpu.pypaper"Extensions and Limitations of the Neural GPU" by Price et al.
"Neural Programmer: Inducing Latent Programs with Gradient Descent" Neelakantan, Le, Sutskever
"Deep neural networks have achieved impressive supervised classification performance in many tasks including image recognition, speech recognition, and sequence to sequence learning. However, this success has not been translated to applications like question answering that may involve complex arithmetic and logic reasoning. A major limitation of these models is in their inability to learn even simple arithmetic and logic operations. For example, it has been shown that neural networks fail to learn to add two binary numbers reliably. In this work, we propose Neural Programmer, an end-to-end differentiable neural network augmented with a small set of basic arithmetic and logic operations. Neural Programmer can call these augmented operations over several steps, thereby inducing compositional programs that are more complex than the built-in operations. The model learns from a weak supervision signal which is the result of execution of the correct program, hence it does not require expensive annotation of the correct program itself. The decisions of what operations to call, and what data segments to apply to are inferred by Neural Programmer. Such decisions, during training, are done in a differentiable fashion so that the entire network can be trained jointly by gradient descent. We find that training the model is difficult, but it can be greatly improved by adding random noise to the gradient. On a fairly complex synthetic table-comprehension dataset, traditional recurrent networks and attentional models perform poorly while Neural Programmer typically obtains nearly perfect accuracy."
"We develop Neural Programmer, a neural network model augmented with a small set of arithmetic and logic operations to perform complex arithmetic and logic reasoning. The model is fully differentiable and it can be trained in an end-to-end fashion to induce programs using much lesser sophisticated human supervision than prior work. It is a general model for program induction broadly applicable across different domains, data sources and languages. Our experiments indicate that the model is capable of learning with delayed supervision and exhibits powerful compositionality."
"While DNN models are capable of learning the fuzzy underlying patterns in the data, they have not had an impact in applications that involve crisp reasoning. A major limitation of these models is in their inability to learn even simple arithmetic and logic operations. For example, Joulin & Mikolov (2015) show that recurrent neural networks fail at the task of adding two binary numbers even when the result has less than 10 bits. This makes existing DNN models unsuitable for downstream applications that require complex reasoning, e.g., natural language question answering. For example, to answer the question “how many states border Texas?”, the algorithm has to perform an act of counting in a table which is something that a neural network is not yet good at. A fairly common method for solving these problems is program induction where the goal is to find a program (in SQL or some high-level languages) that can correctly solve the task. An application of these models is in semantic parsing where the task is to build a natural language interface to a structured database. This problem is often formulated as mapping a natural language question to an executable query. A drawback of existing methods in semantic parsing is that they are difficult to train and require a great deal of human supervision. As the space over programs is non-smooth, it is difficult to apply simple gradient descent; most often, gradient descent is augmented with a complex search procedure, such as sampling. To further simplify training, the algorithmic designers have to manually add more supervision signals to the models in the form of annotation of the complete program for every question or a domain-specific grammar. For example, designing grammars that contain rules to associate lexical items to the correct operations, e.g., the word “largest” to the operation “argmax”, or to produce syntactically valid programs, e.g., disallow the program >= dog. The role of hand-crafted grammars is crucial in semantic parsing yet also limits its general applicability to many different domains."
"The goal of this work is to develop a model that does not require substantial human supervision and is broadly applicable across different domains, data sources and natural languages. We propose Neural Programmer, an end-to-end differentiable neural network augmented with a small set of basic arithmetic and logic operations. In our formulation, the neural network can run several steps using a recurrent neural network. At each step, it can select a segment in the data source and a particular operation to apply to that segment. The neural network propagates these outputs forward at every step to form the final, more complicated output. Using the target output, we can adjust the network to select the right data segments and operations, thereby inducing the correct program. Key to our approach is that the selection process (for the data source and operations) is done in a differentiable fashion (i.e., soft selection or attention), so that the whole neural network can be trained jointly by gradient descent. At test time, we replace soft selection with hard selection. By combining neural network with mathematical operations, we can utilize both the fuzzy pattern matching capabilities of deep networks and the crisp algorithmic power of traditional programmable computers."
"Neural Programmer has two attractive properties. First, it learns from a weak supervision signal which is the result of execution of the correct program. It does not require the expensive annotation of the correct program for the training examples. The human supervision effort is in the form of question, data source and answer triples. Second, Neural Programmer does not require additional rules to guide the program search, making it a general framework. With Neural Programmer, the algorithmic designer only defines a list of basic operations which requires lesser human effort than in previous program induction techniques."
"We experiment with a synthetic table-comprehension dataset, consisting of questions with a wide range of difficulty levels. Examples of natural language translated queries include “print elements in column H whose field in column C is greater than 50 and field in column E is less than 20?” or “what is the difference between sum of elements in column A and number of rows in the table?”. We find that LSTM recurrent networks and LSTM models with attention do not work well. Neural Programmer, however, can completely solve this task or achieve greater than 99% accuracy on most cases by inducing the required latent program."
"Current neural networks cannot handle complex data structures."
"Current neural networks cannot handle numbers well: treat numbers as tokens, which lead to many unknown words."
"Current neural networks cannot make use of rules well: cannot use addition, subtraction, summation, average operations."
"Authors propose a neural programmer by defining a set of symbolic operations (e.g., argmax, greater than); at each step, all possible execution results are fused by a softmax layer, which predicts the probability of each operator at the current step. The step-by-step fusion is accomplished by weighted sum and the model is trained with mean square error. Hence, such approaches work with numeric tables, but may not be suited for other operations like string matching; it also suffers from the problem of “exponential numbers of combinatorial states.”"
videohttp://youtu.be/lc68_d_DnYs?t=24m44s (Neelakantan)videohttp://youtu.be/KmOdBS4BXZ0?t=1h8m44s (Le)posthttp://distill.pub/2016/augmented-rnns/codehttps://github.com/tensorflow/models/tree/master/research/neural_programmerpaper"Learning a Natural Language Interface with Neural Programmer" by Neelakantan et al.
"Neural Programmer-Interpreters" Reed, de Freitas
NPI
"We propose the neural programmer-interpreter: a recurrent and compositional neural network that learns to represent and execute programs. NPI has three learnable components: a task-agnostic recurrent core, a persistent key-value program memory, and domain-specific encoders that enable a single NPI to operate in multiple perceptually diverse environments with distinct affordances. By learning to compose lower-level programs to express higher-level programs, NPI reduces sample complexity and increases generalization ability compared to sequence-to-sequence LSTMs. The program memory allows efficient learning of additional tasks by building on existing programs. NPI can also harness the environment (e.g. a scratch pad with read-write pointers) to cache intermediate results of computation, lessening the long-term memory burden on recurrent hidden units. In this work we train the NPI with fully-supervised execution traces; each program has example sequences of calls to the immediate subprograms conditioned on the input. Rather than training on a huge number of relatively weak labels, NPI learns from a small number of rich examples. We demonstrate the capability of our model to learn several types of compositional programs: addition, sorting, and canonicalizing 3D models. Furthermore, a single NPI learns to execute these programs and all 21 associated subprograms."
"We have shown that the NPI can learn programs in very dissimilar environments with different affordances. In the context of sorting we showed that NPI exhibits very strong generalization in comparison to sequence-to-sequence LSTMs. We also showed how a trained NPI with a fixed core can continue to learn new programs without forgetting already learned programs."
"While unsupervised and reinforcement learning play important roles in perception and motor control, other cognitive abilities are possible thanks to rich supervision and curriculum learning. This is indeed the reason for sending our children to school."
"An advantage of our approach to model building and training is that the learned programs exhibit strong generalization. Specifically, when trained to sort sequences of up to twenty numbers in length, they can sort much longer sequences at test time. In contrast, the experiments will show that more standard sequence to sequence LSTMs only exhibit weak generalization."
"Schmidhuber proposed a related meta-learning idea, whereby one learns the parameters of a slowly changing network, which in turn generates context dependent weight changes for a second rapidly changing network."
"In cognitive science, several theories of brain areas controlling other brain parts so as to carry out multiple tasks have been proposed."
"Instead of using input and output pairs, our model is trained on program execution traces at varying levels of abstraction. In exchange for this richer supervision, we get the benefit of learninng compositionality of programs, and also data efficient training of complex programs."
"In practice we found it effective to employ a curriculum learning strategy. The intuition is that we first learn the most basic subprograms such as shifting pointers left or right, followed by more challenging programs such as comparing and conditionally swapping two numbers. The knowledge of subprogram difficulty is itself a form of supervision, but there could be many reasonable heuristics such as counting the average number of low-level actions generated by the program."
"We also note that our program has a distinct memory advantage over basic LSTMs because all subprograms can be trained in parallel. For programs whose execution length grows e.g. quadratically with the input sequence length, an LSTM will be highly constrained by device memory to train on short sequences. By exploiting compositionality, an effective curriculum can often be developed with sublinear-length subprograms, enabling our NPI model to train on order of magnitude larger sequences than the LSTM."
"Neural Programmer-Interpreters is an attempt to learn libraries of programs (and by programs I mean motor behaviours, perceptual routines, logical relationships, algorithms, policies, etc.)."
"Neural Programmer-Interpreters can also be seen as a way to compile any program into a neural network by learning a model that mimic the program. While more flexible than the previous approaches, the NPI is unable to improve on a learned program due to its dependency on a non-differentiable environment."
"
- Low sample complexity and strong generalization through program re-use
- NPI has a learnable key-value program-memory and can do continual learning
- NPI uses same recurrent core parameters to solve many very different tasks
- NPI can harness the environment to cache intermediate computations
- Learning to learn: A trained NPI can continue learning new programs
- Traing with low-quantity but rich lessons and curriculum learning, instead of many data samples - think of going to school"
"
- Long-term prediction: Model potentially long sequences of actions by exploiting compositional structure.
- Continual learning: Learn new programs by composing previously-learned programs, rather than from scratch.
- Data efficiency: Learn generalizable programs from a small number of example traces.
- Interpretability: By looking at NPI's generated commands, we can understand what it is doing at multiple levels of temporal abstraction."
de Freitas:
"For me there are two types of generalisation, which I will refer to as Symbolic and Connectionist generalisation. If we teach a machine to sort sequences of numbers of up to length 10 or 100, we should expect them to sort sequences of length 1000 say. Obviously symbolic approaches have no problem with this form of generalisation, but neural nets do poorly. On the other hand, neural nets are very good at generalising from data (such as images), but symbolic approaches do poorly here. One of the holy grails is to build machines that are capable of both symbolic and connectionist generalisation. NPI is a very early step toward this. NPI can do symbolic operations such as sorting and addition, but it can also plan by taking images as input and it's able to generalise the plans to different images (e.g. in the NPI car example, the cars are test set cars not seen before)."
"Consider a new task for which you need to train a model. Suppose we have 2 data examples consisting of two 3-digit input sequences and a 3-digit output sequence, as follows: Train_Input_1={425,341}, Train_Output_1={379} Train_Input_2={312,342}, Train_Output_2={357}. Question: If the test input is: Test_Input={242,531}, What is Test_Ouput? Stop reading and see if you can answer this. Ready to move on?! OK so now let me tell you that you need to use two programs: Sort and Add to map the input sequences to the output. Can you now get the answer? Yes, much easier ;) Knowing which programs to use, at this very high cognitive level, is very helpful, and perhaps even essential. Note that NPI would have no problem solving this task as it has already learned to sort and add sequences of numbers. Thus with the core fixed, it can easily learn this new program if we tell it to re-use the sort and add programs. At this point, we don't need to provide it with entire execution traces anymore. In contrast, a sequence to sequence model or any other similar model would not be able to learn this mapping with only two examples as above. I hope this is helpful. We see NPI as a way of providing machines not with examples, but with lessons on how to solve problems."
"It is true that it's hard to train these architectures. Curriculum learning is essential. But here is the thing, when people talk about curriculum learning they often mean "learning with a curriculum" as opposed to "learning a curriculum". The latter is an extremely important problem. In the NPI paper, Scott took steps toward adapting the curriculum. I think you are absolutely right when it comes to the combinatorial challenges. However, humans also appear to be poor at this in some cases. For example, when I show folks the following training data consisting of two input sequences and an output sequence (2 data samples): Input_1: {(3,2,4),(5,2,1)} Output_1: {(3,5,9)} Input_2: {(4,1,3),(3,2,2)} Output_2:{(3,5,7)} they are not able to generalize, when I give then a third example: Input_3={(3,1,4),(2,2,2)}. However, if I tell them to use the programs SORT and ADD, they can quickly figure out the pattern. So for some problems, lots of data might be needed to deal with combinatorial issues. On the other hand, if the problem is of the form: input_1: alice Output_1: ALICE input_2: bob Output_2: ? most would know what Output_2 should be."
"I strongly agree with building the foundations of representations and skills that could give rise to communication, language and writing. Much of my work is indeed in this area. This in fact was one of the driving forces behind NPI. One part of language is procedural understanding. If I say "sort the the following numbers: 2,4,3,6 in descending order", how do you understand the meaning of the sentence? There's a few ways. One natural way requires that you know what sort means. If you can't sort in any way, I don't think you can understand the sentence properly. As Feynman said: "What I cannot create, I do not understand". Moreover, another strong part of what is explored in NPI is the ability of harnessing the environment to do computation - this I believe is very tied to writing. I believe in externalism: My mind is not something inside my head. My mind is made of many memory devices that I know how to access and write to - it is like a search engine in the real world. My mind is also made of other people, who are now extending its ability to think."
- http://www-personal.umich.edu/~reedscot/iclr_project.html
videohttp://youtube.com/watch?v=B70tT4WMyJk (overview)videohttp://youtube.com/watch?v=s7PuBqwI2YA (demo)videohttp://youtu.be/SAcHyzMdbXc?t=5m14s (de Freitas)videohttp://youtu.be/x1kf4Zojtb0?t=52m22s (de Freitas)videohttp://videolectures.net/iclr2016_reed_neural_programmer/ (Reed)videohttps://youtu.be/LsLPp7gqwA4?t=21m19s (Minervini)posthttps://pseudoprofound.wordpress.com/2016/06/07/neural-programmer-interpreters-programs-that-can-learn-programs/posthttp://near.ai/articles/2017-05-31-NPI/posthttps://reddit.com/r/MachineLearning/comments/3y4zai/ama_nando_de_freitas/cyc53gtposthttps://reddit.com/r/MachineLearning/comments/3y4zai/ama_nando_de_freitas/cydu4azpaper"Learning Compositional Neural Programs with Recursive Tree Search and Planning" by Pierrot et al.
"One-shot Learning with Memory-Augmented Neural Networks" Santoro, Bartunov, Botvinick, Wierstra, Lillicrap
"Despite recent breakthroughs in the applications of deep neural networks, one setting that presents a persistent challenge is that of "one-shot learning." Traditional gradient-based networks require a lot of data to learn, often through extensive iterative training. When new data is encountered, the models must inefficiently relearn their parameters to adequately incorporate the new information without catastrophic interference. Architectures with augmented memory capacities, such as Neural Turing Machines, offer the ability to quickly encode and retrieve new information, and hence can potentially obviate the downsides of conventional models. Here, we demonstrate the ability of a memory-augmented neural network to rapidly assimilate new data, and leverage this data to make accurate predictions after only a few samples. We also introduce a new method for accessing an external memory that focuses on memory content, unlike previous methods that additionally use memory location-based focusing mechanisms."
"Many important learning problems demand an ability to draw valid inferences from small amounts of data, rapidly and knowledgeably adjusting to new information. Such problems pose a particular challenge for deep learning, which typically relies on slow, incremental parameter changes. We investigated an approach to this problem based on the idea of meta-learning. Here, gradual, incremental learning encodes background knowledge that spans tasks, while a more flexible memory resource binds information particular to newly encountered tasks. Our central contribution is to demonstrate the special utility of a particular class of MANNs for meta-learning. These are deep learning architectures containing a dedicated, addressable memory resource that is structurally independent from the mechanisms that implement process control. The MANN examined here was found to display performance superior to a LSTM in two meta-learning tasks, performing well in classification and regression tasks when only sparse training data was available."
"A critical aspect of the tasks studied is that they cannot be performed based solely on rote memory. New information must be flexibly stored and accessed, with correct performance demanding more than just accurate retrieval. Specifically, it requires that inferences be drawn from new data based on longer-term experience, a faculty sometimes referred as “inductive transfer.” MANNs are well-suited to meet these dual challenges, given their combination of flexible memory storage with the rich capacity of deep architectures for representation learning."
"Meta-learning is recognized as a core ingredient of human intelligence, and an essential test domain for evaluating models of human cognition. Given recent successes in modeling human skills with deep networks, it seems worthwhile to ask whether MANNs embody a promising hypothesis concerning the mechanisms underlying human meta-learning. In informal comparisons against human subjects, the MANN employed in this paper displayed superior performance, even at set-sizes that would not be expected to overtax human working memory capacity. However, when memory is not cleared between tasks, the MANN suffers from proactive interference, as seen in many studies of human memory and inference. These preliminary observations suggest that MANNs may provide a useful heuristic model for further investigation into the computational basis of human meta-learning. The work we presented leaves several clear openings for next-stage development. First, our experiments employed a new procedure for writing to memory that was prima facie well suited to the tasks studied. It would be interesting to consider whether meta-learning can itself discover optimal memory-addressing procedures. Second, although we tested MANNs in settings where task parameters changed across episodes, the tasks studied contained a high degree of shared high-level structure. Training on a wider range of tasks would seem likely to reintroduce standard challenges associated with continual learning, including the risk of catastrophic interference. Finally, it may be of interest to examine MANN performance in meta-learning tasks requiring active learning, where observations must be actively selected."
"
- Neural network weights learn to fit a function through many examples, but can't adapt quickly to new/small amounts of data.
- Memory modules can give networks a short-term memory to do this, and the metalearning setup they investigate is learning how to utilise this memory effectively. The memory structure exists, but the network needs to learn how to store and retrieve data for the task at hand.
- The task is to predict xt when only yt-1 is provided at the same time - it can't learn a single mapping and must use its memory to compare xt to previously seen inputs with provided labels. It never knows the correct class of the first instance presented of each class (but it can make an educated guess by not guessing previously seen classes that look different). So labels are given at test time as well.
- The shuffling means mixing up the labels e.g. giving a picture of 1 the class label 3, and the picture of 2 a class label of 5 etc. This way the network can't encode mappings in its weights, it has to learn how to learn (store examples in memory for comparison later). More explicitly, it has to store a sample and its label in the next time step if it intends to use it for comparison with new data.
"
videohttp://techtalks.tv/talks/meta-learning-with-memory-augmented-neural-networks/62523/ + https://vk.com/wall-44016343_8782 (Santoro)videohttps://youtube.com/watch?v=qos2CcviAuY (Bartunov)in russiannoteshttp://rylanschaeffer.github.io/content/research/one_shot_learning_with_memory_augmented_nn/main.htmlnoteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1605.06065codehttps://github.com/tristandeleu/ntm-one-shot
"problems:
- cortical neurons do not communicate real-valued activities - they send spikes
- how do neurons know dy/dx (the gradient of their non-linear function) if this function wanders?
- the neurons need to send two different types of signal: forward pass (signal = activity = y) and backward pass (signal = dE/dx)
- neurons do not have point-wise reciprocal connections with the same weight in both directions"
"solutions:
- the fact that neurons send spikes rather than real numbers is not a problem: spikes are a great regularizer (similar to dropout)
- error derivatives can be represented as temporal derivatives: this allows a neuron to represent both its activity and its error derivative in the same axon
- spike-time-dependent plasticity is the signature of backpropagation learning
- the problem that each bottom-up connection needs to have a corresponding top-down connection in a non-problem: random top-down weights work just fine"
"Hinton starts with a discussion on how the brain probably implements something equivalent to backpropagation, despite several huge objections from neuroscience. He reviews how unsupervised learning techniques can help augment/expand the training signal. Next he discusses the brain's immense size (10^14 parameters) relative to supervision bits/training data indicates the brain is operating with a high model/data complexity ratio. He discusses how this is actually ideal in the bayesian sense - more data is always good, and a larger model is always good - provided your model is properly regularized. The best (bayesian) regularization amounts to ensembling over the entire model space. Dropout is an effective trick to approximate that, and dropout is just a particular type of multiplicative noise. He then shows how neural Poisson spiking can implement multiplicative noise - and thus dropout style ensembling. Rest of the talk focuses on how spiking nets can implement backpropagation equivalent credit assignment (error derivatives as temporal derivatives). Autoencoders that learn asymmetric but matched weights, and the 'miracle' in 2014 when Lillicrap et al showed that backpropagation can even work (almost as well) using random, fixed, untrained asymmetric back connections. Conclusion: the brain really is a deep neural network, spikes are just a form of dropout regularization, error derivatives can be represented as temporal derivatives (backpropagation with spike timing dependent plasticity), connections symmetry doesn't matter."
videohttp://youtube.com/watch?v=qIEfJ6OBGj8 (Hinton)videohttp://youtube.com/watch?v=VIRCybGgHts (Hinton)videohttp://youtube.com/watch?v=cBLk5baHbZ8 (Hinton)videohttp://sms.cam.ac.uk/media/2017973 (38:00) (Hinton)
"Backpropagation and the Brain" Lillicrap, Santoro, Marris, Akerman, Hinton
NGRAD
"During learning, the brain modifies synapses to improve behaviour. In the cortex, synapses are embedded within multilayered networks, making it difficult to determine the effect of an individual synaptic modification on the behaviour of the system. The backpropagation algorithm solves this problem in deep artificial neural networks, but historically it has been viewed as biologically problematic. Nonetheless, recent developments in neuroscience and the successes of artificial neural networks have reinvigorated interest in whether backpropagation offers insights for understanding learning in the cortex. The backpropagation algorithm learns quickly by computing synaptic updates using feedback connections to deliver error signals. Although feedback connections are ubiquitous in the cortex, it is difficult to see how they could deliver the error signals required by strict formulations of backpropagation. Here we build on past and recent developments to argue that feedback connections may instead induce neural activities whose differences can be used to locally approximate these signals and hence drive effective learning in deep networks in the brain."
videohttps://youtube.com/watch?v=a0f07M2uj_A (Kilcher)
"Towards Biologically Plausible Deep Learning" Bengio, Lee, Bornschein, Lin
"Neuroscientists have long criticised deep learning algorithms as incompatible with current knowledge of neurobiology. We explore more biologically plausible versions of deep representation learning, focusing here mostly on unsupervised learning but developing a learning mechanism that could account for supervised, unsupervised and reinforcement learning. The starting point is that the basic learning rule believed to govern synaptic weight updates (Spike-Timing-Dependent Plasticity) can be interpreted as gradient descent on some objective function so long as the neuronal dynamics push firing rates towards better values of the objective function (be it supervised, unsupervised, or reward-driven). The second main idea is that this corresponds to a form of the variational EM algorithm, i.e., with approximate rather than exact posteriors, implemented by neural dynamics. Another contribution of this paper is that the gradients required for updating the hidden states in the above variational interpretation can be estimated using an approximation that only requires propagating activations forward and backward, with pairs of layers learning to form a denoising auto-encoder. Finally, we extend the theory about the probabilistic interpretation of auto-encoders to justify improved sampling schemes based on the generative interpretation of denoising auto-encoders, and we validate all these ideas on generative learning tasks."
"Deep learning and artificial neural networks have taken their inspiration from brains, but mostly for the form of the computation performed (with much of the biology, such as the presence of spikes remaining to be accounted for). However, what is lacking currently is a credible machine learning interpretation of the learning rules that seem to exist in biological neurons that would explain joint training of a deep neural network, i.e., accounting for credit assignment through a long chain of neural connections. Solving the credit assignment problem therefore means identifying neurons and weights that are responsible for a desired outcome and changing parameters accordingly. Whereas back-propagation offers a machine learning answer, it is not biologically plausible:
(1) the back-propagation computation (coming down from the output layer to lower hidden layers) is purely linear, whereas biological neurons interleave linear and non-linear operations,
(2) if the feedback paths known to exist in the brain (with their own synapses and maybe their own neurons) were used to propagate credit assignment by backprop, they would need precise knowledge of the derivatives of the non-linearities at the operating point used in the corresponding feedforward computation on the feedforward path,
(3) similarly, these feedback paths would have to use exact symmetric weights (with the same connectivity, transposed) of the feedforward connections,
(4) real neurons communicate by (possibly stochastic) binary values (spikes), not by clean continuous values,
(5) the computation would have to be precisely clocked to alternate between feedforward and back-propagation phases (since the latter needs the former’s results),
(6) it is not clear where the output targets would come from."
"The approach proposed in this paper has the ambition to address all these issues, although some question marks as to a possible biological implementations remain, and of course many details of the biology that need to be accounted for are not covered here. Note that back-propagation is used not just for classical supervised learning but also for many unsupervised learning algorithms, including all kinds of auto-encoders: sparse auto-encoders, denoising auto-encoders, contractive auto-encoders, and more recently, variational auto-encoders. Other unsupervised learning algorithms exist which do not rely on back-propagation, such as the various Boltzmann machine learning algorithms. Boltzmann machines are probably the most biologically plausible learning algorithms for deep architectures that we currently know, but they also face several question marks in this regard, such as the weight transport problem ((3) above) to achieve symmetric weights, and the positive-phase vs negative-phase synchronization question (similar to (5) above)."
Our starting point proposes an interpretation of the main learning rule observed in biological synapses: Spike-Timing-Dependent Plasticity. Following up on the ideas presented in Hinton’s 2007 talk, we first argue that STDP could be seen as stochastic gradient descent if only the neuron was driven by a feedback signal that either increases or decreases the neuron’s firing rate in proportion to the gradient of an objective function with respect to the neuron’s voltage potential. We then argue that the above interpretation suggests that neural dynamics (which creates the above changes in neuronal activations thanks to feedback and lateral connections) correspond to inference towards neural configurations that are more consistent with each other and with the observations (inputs, targets, or rewards). This view extends Hinton’s supervised learning proposal to the unsupervised generative setting. It naturally suggests that the training procedure corresponds to a form of variational EM, possibly based on MAP (maximum a posteriori) or MCMC (Markov Chain Monte-Carlo) approximations. Then we show how this mathematical framework suggests a training procedure for a deep generative network with many layers of latent variables. However, the above interpretation would still require to compute some gradients. Another contribution is to show that one can estimate these gradients via an approximation that only involves ordinary neural computation and no explicit derivatives, following previous work on target propagation."
"We consider this paper as an exploratory step towards explaining a central aspect of the brain’s learning algorithm: credit assignment through many layers. Departing from back-propagation could be useful not just for biological plausibility but from a machine learning point of view as well: by working on the “targets” for the intermediate layers, we may avoid the kind of reliance on smoothness and derivatives that characterizes back-propagation, as these techniques can in principle work even with highly non-linear transformations for which gradients are often near 0, e.g., with stochastic binary units. Besides the connection between STDP and variational EM, an important contribution of this paper is to show that the “targetprop” update which estimates the gradient through one layer can be used for inference, yielding systematic improvements in the joint likelihood and allowing to learn a good generative model. Another interesting contribution is that the variational EM updates, with noise added, can also be interpreted as training a denoising auto-encoder over both visible and latent variables, and that iterating from the associated Markov chain yields better samples than those obtained from the directed graphical model estimated by variational EM. Many directions need to be investigated to follow-up on the work reported here. An important element of neural circuitry is the strong presence of lateral connections between nearby neurons in the same area. In the proposed framework, an obvious place for such lateral connections is to implement the prior on the joint distribution between nearby neurons, something we have not explored in our experiments. For example, Garrigues & Olshausen have discussed neural implementations of the inference involved in sparse coding based on the lateral connections. Although we have found that “injecting noise” helped training a better model, more theoretical work needs to be done to explore this replacement of a MAP-based inference by an MCMC-like inference, which should help determine how and how much of this noise should be injected. Whereas this paper focused on unsupervised learning, these ideas could be applied to supervised learning and reinforcement learning as well. For reinforcement learning, an important role of the proposed algorithms is to learn to predict rewards, although a more challenging question is how the MCMC part could be used to simulate future events. For both supervised learning and reinforcement learning, we would probably want to add a mechanism that would give more weight to minimizing prediction (or reconstruction) error for some of the observed signals (e.g. y is more important to predict than x). Finally, a lot needs to be done to connect in more detail the proposals made here with biology, including neural implementation using spikes with Poisson rates as the source of signal quantization and randomness, taking into account the constraints on the sign of the weights depending on whether the pre-synaptic neuron is inhibitory or excitatory, etc. In addition, although the operations proposed here are backprop-free, they may still require some kinds of synchronizations (or control mechanism) and specific connectivity to be implemented in brains."
"We explore the following crucial question: how could brains potentially perform the kind of powerful credit assignment that allows hidden layers of a very deep network to be trained and that has been so successful with deep learning recently? Global reinforcement learning signals have too much variance (scaling with the number of neurons or synapses) to be credible (by themselves) from a machine learning point of view. Concerns have been raised about how something like back-propagation could be implemented in brains. We present several intriguing results all aimed at answering this question and possibly providing pieces of this puzzle. We start with an update rule that yields updates similar to STDP but that is anchored in quantities such as pre-synaptic and post-synaptic firing rates and temporal rates of change. We then show that if neurons are connected symmetrically and thus define an energy function, (a) their behaviour corresponds to inference, i.e., going down the energy, and (b) after a prediction is made on a sensor and an actual value is observed, the early phases of inference in this network actually propagate prediction error gradients, and (c) using the above STDP-inspired rule yields a gradient descent step on prediction error for feedforward weights. This is based on a new mathematical result which provides a more general framework for machine learning to train dynamical systems at equilibrium. Finally, we discuss some of the limitations of the current model (such as the forced symmetry of synaptic weights and the question of learning the full joint distribution and not just a point prediction, and how to train dynamical systems which are generally not near their equilibrium points) as well as ideas around them."
"My perspective is that we know that there are certain ways in which backpropagation is limited to such an extent that it can't be close to what the brain does, so it's interesting to explore biological inspirations for how we can get around these limitations. Here are the major limitations, in my view:
- Backpropagation doesn't really work in an online setting, because you need to traverse the whole graph of nodes every time you make an update. Of course, you can truncate the update to recently computed nodes (truncated BPTT) but this limits the length of the dependencies that can be learned.
- Backpropagation requires all nodes to be stored in memory.
- I think this is a less important limitation, but many neural architectures require parameter sharing, which isn't necessarily achievable in the brain."
videohttps://youtube.com/watch?v=4-wmpOjn6iU (Bengio)videohttps://youtube.com/watch?v=TvZLAyOByMQ (Bengio)videohttps://youtube.com/watch?v=W86H4DpFnLY (Bengio)videohttps://archive.org/details/Redwood_Center_2016_09_27_Yoshua_Bengio (Bengio)videohttp://youtube.com/watch?v=lKVIXI8Djv4 (Bengio)videohttp://youtu.be/exhdfIPzj24?t=59m13s (Bengio)slideshttp://iro.umontreal.ca/~bengioy/talks/Brains+Bits-NIPS2016Workshop.pptx.pdf
"Random Feedback Weights Support Learning in Deep Neural Networks" Lillicrap, Cownden, Tweed, Akerman
"The brain processes information through many layers of neurons. This deep architecture is representationally powerful, but it complicates learning by making it hard to identify the responsible neurons when a mistake is made. In machine learning, the backpropagation algorithm assigns blame to a neuron by computing exactly how it contributed to an error. To do this, it multiplies error signals by matrices consisting of all the synaptic weights on the neuron’s axon and farther downstream. This operation requires a precisely choreographed transport of synaptic weight information, which is thought to be impossible in the brain. Here we present a surprisingly simple algorithm for deep learning, which assigns blame by multiplying error signals by random synaptic weights. We show that a network can learn to extract useful information from signals sent through these random feedback connections. In essence, the network learns to learn. We demonstrate that this new mechanism performs as quickly and accurately as backpropagation on a variety of problems and describe the principles which underlie its function. Our demonstration provides a plausible basis for how a neuron can be adapted using error signals generated at distal locations in the brain, and thus dispels long-held assumptions about the algorithmic constraints on learning in neural circuits."
paperhttp://www.nature.com/articles/ncomms13276.epdf ("Nature")videohttp://youtu.be/-kHLKLLxIF4?t=20m28s (Lillicrap)videohttps://youtube.com/watch?v=NnnuwdbomFc (Filippov)in russian
"Artificial neural networks are most commonly trained with the back-propagation algorithm, where the gradient for learning is provided by back-propagating the error, layer by layer, from the output layer to the hidden layers. A recently discovered method called feedback-alignment shows that the weights used for propagating the error backward don't have to be symmetric with the weights used for propagation the activation forward. In fact, random feedback weights work evenly well, because the network learns how to make the feedback useful. In this work, the feedback alignment principle is used for training hidden layers more independently from the rest of the network, and from a zero initial condition. The error is propagated through fixed random feedback connections directly from the output layer to each hidden layer. This simple method is able to achieve zero training error even in convolutional networks and very deep networks, completely without error back-propagation. The method is a step towards biologically plausible machine learning because the error signal is almost local, and no symmetric or reciprocal weights are required. Experiments show that the test performance on MNIST and CIFAR is almost as good as those obtained with back-propagation for fully connected networks. If combined with dropout, the method achieves 1.45% error on the permutation invariant MNIST task."
videohttps://youtube.com/watch?v=NnnuwdbomFc (Filippov)in russian
"Deep Learning without Weight Transport" Akrout, Wilson, Humphreys, Lillicrap, Tweed
"Current algorithms for deep learning probably cannot run in the brain becausethey rely onweight transport, where forward-path neurons transmit their synapticweights to a feedback path, in a way that is likely impossible biologically. An algo-rithm called feedback alignment achieves deep learning without weight transport byusing random feedback weights, but it performs poorly on hard visual-recognitiontasks. Here we describe two mechanisms — a neural circuit called aweight mirrorand a modification of an algorithm proposed by Kolen and Pollack in 1994 — bothof which let the feedback path learn appropriate synaptic weights quickly and accu-rately even in large networks, without weight transport or complex wiring. Testedon the ImageNet visual-recognition task, these mechanisms learn almost as well asbackprop (the standard algorithm of deep learning, which uses weight transport)and they outperform feedback alignment and another, more-recent transport-freealgorithm, the sign-symmetry method."
videohttps://slideslive.com/38922691/invited-talk-deep-learning-without-weight-transport (Lillicrap)videohttps://youtube.com/watch?v=NnnuwdbomFc (Filippov)in russian
"Assessing the Scalability of Biologically-motivated Deep Learning Algorithms and Architectures" Bartunov, Santoro, Richards, Hinton, Lillicrap
"The backpropagation of error algorithm is often said to be impossible to implement in a real brain. The recent success of deep networks in machine learning and AI, however, has inspired a number of proposals for understanding how the brain might learn across multiple layers, and hence how it might implement or approximate BP. As of yet, none of these proposals have been rigorously evaluated on tasks where BP-guided deep learning has proved critical, or in architectures more structured than simple fully-connected networks. Here we present the first results on scaling up a biologically motivated model of deep learning to datasets which need deep networks with appropriate architectures to achieve good performance. We present results on CIFAR-10 and ImageNet. For CIFAR-10 we show that our algorithm, a straightforward, weight-transport-free variant of difference target-propagation modified to remove backpropagation from the penultimate layer, is competitive with BP in training deep networks with locally defined receptive fields that have untied weights. For ImageNet we find that both DTP and our algorithm perform significantly worse than BP, opening questions about whether different architectures or algorithms are required to scale these approaches. Our results and implementation details help establish baselines for biologically motivated deep learning schemes going forward."
"- No weight transport (i.e. weight transposes)
- No weight tying (i.e. convolutional kernels)
- No feedback of signed errors
But still:- Use continuous rather than spiking signals
- Use separate forward and backward passes
- Use local activation derivatives"
videohttp://youtu.be/-kHLKLLxIF4?t=32m37s (Lillicrap)videohttp://youtube.com/watch?v=XzSRtu413CY (Lillicrap)videohttps://youtu.be/4u2ZF37i4Hs?t=1h45m25s (Bartunov)in russianpaper"Difference Target Propagation" by Lee, Zhang, Fischer, Bengio
interesting papers - reinforcement learning - applications
"This is an opinion paper about the strengths and weaknesses of Deep Nets for vision. They are at the center of recent progress on artificial intelligence and are of growing importance in cognitive science and neuroscience. They have enormous successes but also clear limitations. There is also only partial understanding of their inner workings. It seems unlikely that Deep Nets in their current form will be the best long-term solution either for building general purpose intelligent machines or for understanding the mind/brain, but it is likely that many aspects of them will remain. At present Deep Nets do very well on specific types of visual tasks and on specific benchmarked datasets. But Deep Nets are much less general purpose, flexible, and adaptive than the human visual system. Moreover, methods like Deep Nets may run into fundamental difficulties when faced with the enormous complexity of natural images which can lead to a combinatorial explosion."
videohttps://youtube.com/watch?v=VxKezjy0myc (Yuille)posthttps://thegradient.pub/the-limitations-of-visual-deep-learning-and-how-we-might-fix-them
"Task-based End-to-end Model Learning in Stochastic Optimization" Donti, Amos, Kolter
"With the increasing popularity of machine learning techniques, it has become common to see prediction algorithms operating within some larger process. However, the criteria by which we train these algorithms often differ from the ultimate criteria on which we evaluate them. This paper proposes an end-to-end approach for learning probabilistic machine learning models in a manner that directly captures the ultimate task-based objective for which they will be used, within the context of stochastic programming. We present three experimental evaluations of the proposed approach: a classical inventory stock problem, a real-world electrical grid scheduling task, and a real-world energy storage arbitrage task. We show that the proposed approach can outperform both traditional modeling and purely black-box policy optimization approaches in these applications."
"While prediction algorithms commonly operate within some larger process, the criteria by which we train these algorithms often differ from the ultimate criteria on which we evaluate them: the performance of the full “closed-loop” system on the ultimate task at hand. For instance, instead of merely classifying images in a standalone setting, one may want to use these classifications within planning and control tasks such as autonomous driving. While a typical image classification algorithm might optimize accuracy or log likelihood, in a driving task we may ultimately care more about the difference between classifying a pedestrian as a tree vs. classifying a garbage can as a tree. Similarly, when we use a probabilistic prediction algorithm to generate forecasts of upcoming electricity demand, we then want to use these forecasts to minimize the costs of a scheduling procedure that allocates generation for a power grid. As these examples suggest, instead of using a “generic loss”, we instead may want to learn a model that approximates the ultimate task-based “true loss”."
"This paper considers an end-to-end approach for learning probabilistic machine learning models that directly capture the objective of their ultimate task. Formally, we consider probabilistic models in the context of stochastic programming, where the goal is to minimize some expected cost over the models’ probabilistic predictions, subject to some (potentially also probabilistic) constraints. As mentioned above, it is common to approach these problems in a two-step fashion: first to fit a predictive model to observed data by minimizing some criterion such as negative log-likelihood, and then to use this model to compute or approximate the necessary expected costs in the stochastic programming setting. While this procedure can work well in many instances, it ignores the fact that the true cost of the system (the optimization objective evaluated on actual instantiations in the real world) may benefit from a model that actually attains worse overall likelihood, but makes more accurate predictions over certain manifolds of the underlying space."
"We propose to train a probabilistic model not (solely) for predictive accuracy, but so that–when it is later used within the loop of a stochastic programming procedure–it produces solutions that minimize the ultimate task-based loss. This formulation may seem somewhat counterintuitive, given that a “perfect” predictive model would of course also be the optimal model to use within a stochastic programming framework. However, the reality that all models do make errors illustrates that we should indeed look to a final task-based objective to determine the proper error tradeoffs within a machine learning setting. This paper proposes one way to evaluate task-based tradeoffs in a fully automated fashion, by computing derivatives through the solution to the stochastic programming problem in a manner that can improve the underlying model."
"Preliminary experiments indicate that our task-based learning model substantially outperforms MLE and policy-optimizing approaches in all but the (rare) case that the MLE model “perfectly” characterizes the underlying distribution. Our method also achieves a 38.6% performance improvement over a highly-optimized real-world stochastic programming algorithm for scheduling electricity generation based on predicted load. In the case of energy price prediction, where there is a high degree of inherent stochasticity in the problem, our method demonstrates more reliable task performance than a traditional predictive method."
videohttps://youtube.com/watch?v=vGSzqbgDB-8videohttps://youtube.com/watch?v=q368eR5eVvY (Kolter)
"Deep Value Networks Learn to Evaluate and Iteratively Refine Structured Outputs" Gygli, Norouzi, Angelova
"We approach structured output prediction by learning a deep value network (DVN) that evaluates different output structures for a given input. For example, when applied to image segmentation, the value network takes an image and a segmentation mask as inputs and predicts a scalar score evaluating the mask quality and its correspondence with the image. Once the value network is optimized, at inference, it finds output structures that maximize the score of the value net via gradient descent on continuous relaxations of structured outputs. Thus DVN takes advantage of the joint modeling of the inputs and outputs. Our framework applies to a wide range of structured output prediction problems. We conduct experiments on multi-label classification based on text data and on image segmentation problems. DVN outperforms several strong baselines and the state-of-the-art results on these benchmarks. In addition, on image segmentation, the proposed deep value network learns complex shape priors and effectively combines image information with the prior to obtain competitive segmentation results."
"To enable effective iterative refinement of structured outputs via gradient descent on the score of a DVN, we relax our outputs to live in a continuous space instead of a discrete space, and extend the domain of loss function so the loss applies to continuous variable outputs. Then, we train a DVN on many output examples encouraging the network to predict very accurate (negative) loss scores for any output hypothesis. We generate the output hypotheses via gradient descent at training time, so that the value net’s estimate around the inference trajectory is as accurate as possible. We also generate output hypotheses by finding adversarial cases. Once the value network is optimized, at inference, it finds output structures that maximize the score via gradient ascent on continuous relaxations of structured outputs."
"deep value network that evaluates different output structures for a given input + gradient descent inference algorithm for structured output prediction"
videohttps://vimeo.com/238243269 (Norouzi)
"Deep Learning with Logged Bandit Feedback" Joachims et al.
BanditNet ICLR 2018
"We propose a new output layer for deep neural networks that permits the use of logged contextual bandit feedback for training. Such contextual bandit feedback can be available in huge quantities (e.g., logs of search engines, recommender systems) at little cost, opening up a path for training deep networks on orders of magnitude more data. To this effect, we propose a counterfactual risk minimization approach for training deep networks using an equivariant empirical risk estimator with variance regularization, BanditNet, and show how the resulting objective can be decomposed in a way that allows stochastic gradient descent training. We empirically demonstrate the effectiveness of the method by showing how deep networks – ResNets in particular – can be trained for object recognition without conventionally labeled images."
videohttps://youtube.com/watch?v=lzA5K4im2no (Joachims)
"Domain-Adversarial Training of Neural Networks" Ganin, Ustinova, Ajakan, Germain, Larochelle, Laviolette, Marchand, Lempitsky
"We introduce a new representation learning approach for domain adaptation, in which data at training and test time come from similar but different distributions. Our approach is directly inspired by the theory on domain adaptation suggesting that, for effective domain transfer to be achieved, predictions must be made based on features that cannot discriminate between the training (source) and test (target) domains. The approach implements this idea in the context of neural network architectures that are trained on labeled data from the source domain and unlabeled data from the target domain (no labeled target-domain data is necessary). As the training progresses, the approach promotes the emergence of features that are (i) discriminative for the main learning task on the source domain and (ii) indiscriminate with respect to the shift between the domains. We show that this adaptation behaviour can be achieved in almost any feed-forward model by augmenting it with few standard layers and a new gradient reversal layer. The resulting augmented architecture can be trained using standard backpropagation and stochastic gradient descent, and can thus be implemented with little effort using any of the deep learning packages. We demonstrate the success of our approach for two distinct classification problems (document sentiment analysis and image classification), where state-of-the-art domain adaptation performance on standard benchmarks is achieved. We also validate the approach for descriptor learning task in the context of person re-identification application."
videohttp://videolectures.net/icml2015_ganin_domain_adaptation/ (Ganin)videohttp://youtu.be/FpZqmnOB-R8?t=9m (Lempitsky)in russiannoteshttp://www.shortscience.org/paper?bibtexKey=journals/corr/1409.7495codehttps://github.com/pumpikano/tf-dannpaper"Unsupervised Domain Adaptation by Backpropagation" by Ganin and Lempitsky