This package extends ekf_rio with yaw aiding based on Manhattan world assumptions for indoor environments. We used an instantaneous approach which can provide yaw aiding without scan matching. In contrast to ekf_rio, ekf_yrio estimates all IMU offsets (even the yaw rate offset) which results in accurate state estimation even on long indoor datasets. An evaluation with the radar_inertial_datasets_icins_2021 shows that ekf_yrio achieves even slightly better accuracies than the state of the art VIO framework VINS (no loop closures). We outperform VINS regarding runtime as ekf_yrio runs almost 90x faster than VINS!
Check out our paper for more details Yaw aided Radar Inertial Odometry uisng Manhattan World Assumptions.
If you use ekf_yrio or the provided datasets for your academic research, please cite our related paper:
@INPROCEEDINGS{DoerICINS2021,
author={Doer, Christopher and Trommer, Gert F.},
booktitle={2021 28th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS)},
title={Yaw aided Radar Inertial Odometry uisng Manhattan World Assumptions},
year={2021},
pages={1-10}
All carried and flight datasets presented in our Paper "Yaw aided Radar Inertial Odometry uisng Manhattan World Assumptions" are available online: radar_inertial_datasets_icins_2021. These datasets also include pseudo ground truth which has been created using VINS (with loop closures).

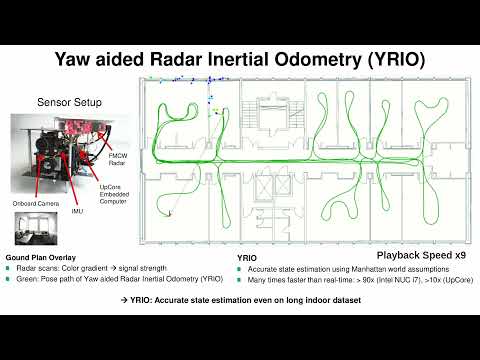
The image below shows the estimation result of ekf_yrio for the indoor dataset "carried_2" (part of
radar_inertial_datasets_icins_2021).
This dataset covers a trajectory length of 451m over a period of 392s whereas the start and end pose are equal.
ekf_yrio achieved a final position error of 0.14% of the distance traveled.
Processing of the whole dataset took just 4.32s with an Intel NUC i7 and 36s with an UpCore embedded computer

Results on Datasets: radar_inertial_datasets_icins_2021
Translation RMSE Carried Datasets
| Algorithm | carried_1 | carried_2 | carried_3 | carried_4 | carried_5 | Mean |
|---|---|---|---|---|---|---|
| VINS (no loop closures) | 0.21 | 0.33 | 0.33 | 0.41 | 0.20 | 0.30 |
| ekf_rio w/o barometer | 0.67 | 0.30 | 0.32 | 0.37 | 0.37 | 0.41 |
| ekf_rio w/ barometer | 0.65 | 0.27 | 0.29 | 0.36 | 0.31 | 0.37 |
| ekf_yrio w/o barometer | 0.30 | 0.23 | 0.29 | 0.35 | 0.36 | 0.30 |
| ekf_yrio w/ barometer | 0.32 | 0.27 | 0.23 | 0.31 | 0.28 | 0.28 |
Translation RMSE Flight Datasets
| Algorithm | flight_1 | flight_2 | flight_3 | flight_4 | Mean |
|---|---|---|---|---|---|
| VINS (no loop closures) | 0.39 | 0.13 | 0.17 | 0.19 | 0.22 |
| ekf_rio w/o barometer | 0.32 | 0.15 | 0.29 | 0.31 | 0.27 |
| ekf_rio with barometer | 0.28 | 0.17 | 0.27 | 0.31 | 0.26 |
| ekf_yrio w/o barometer | 0.27 | 0.12 | 0.31 | 0.16 | 0.22 |
| ekf_yrio with barometer | 0.23 | 0.15 | 0.26 | 0.16 | 0.20 |
Relative Errors

This analysis shows that ekf_yrio improves ekf_rio clearly achieving even slightly better mean translation RMSE than the state of the art VIO framework VINS!
This analysis can be generated using a single script, see below "Run the radar_inertial_datasets_icins_2021".
Run ekf_yrio with the "carried_2" dataset in rosbag mode and start rviz for visualization:
roslaunch ekf_yrio demo_datasets_ekf-yrio_rosbag.launch
Run without rviz:
roslaunch ekf_yrio demo_datasets_ekf-yrio_rosbag.launch enable_rviz:=False
Run in online mode:
roslaunch ekf_yrio demo_datasets_ekf-yrio_ros.launch
rosbag play --clock radar_inertial_datasets_icins_2021_carried_2.bag
Run a single dataset (e.g. carried_1) of the radar_inertial_datasets_icins_2021 dataset:
roslaunch ekf_yrio icins2021_datasets_ekf-yrio_rosbag.launch dataset_dir:=<path_to_dataset> rosbag:=carried_1.bag
Run and evaluate all runs of the radar_inertial_datasets_icins_2021 dataset (depends on rpg_trajectory_evaluation, see Getting Started in README for installation):
rosrun ekf_yrio icins_2021_evaluation.py _rosbag_base_dir:=<path_to_radar_inertial_datasets_icins_2021>
This will save the evaluation at <path_to_radar_inertial_datasets_icins_2021>/results for the carried and flight datasets. The estimation result of ekf_rio and ekf_yrio (with and w/o barometer fusion) are aligned with the ground truth and evaluated using rpg_trajectory_evaluation. Plots and further error metrics are located at <path_to_radar_inertial_datasets_icins_2021>/results/<carried/flight>_datasets/evaluation_full_align.
Our ekf_yrio implementation provides two nodes for ROS interfacing:
- ros_node: Subscribes to all topics and does online processing
- rosbag_node: Reads a rosbag and runs ekf_yrio at maximum speed
A set of demo parameters is given in ekf_yrio_default. Most of the parameters can be changed online using rqt_reconfigure. Further documentation of the parameters can be found using the tooltip text in rqt_reconfigure and in the python files, see cfg.
Published topics are the same for both modes:
- ~state (ekf_rio/EkfRioState): full filter state (NED-convention)
- ~covariance (ekf_rio/EkfRioCovariance): diagonal elements of covariance matrix
- ~pose (geometry_msgs/PoseStamped): pose (ROS convention)
- ~twist (geometry_msgs/TwistStamped): twist (ROS convention)
- ~pose_path (nav_msgs/Path): pose path (ROS convention)
- ~radar_scan_inlier (sensor_msgs/PointCloud2): radar scan inlier used for velocity estimation
- ~yaw_aiding_init (sensor_msgs/PointCloud2): all radar scan point used for Manhattan angle init
- ~radar_scan_yaw_inlier (sensor_msgs/PointCloud2): radar scan point used for yaw aiding