The concept of a Constraint has many names: constraints, cost functions, factors, probably many others. At the most basic level, a Constraint accepts one or more Variable values and produces a score. The Optimizer will then search for the values of all the Variables that minimizes the total score. This search is performed by a nonlinear least-squares solver. The fuse stack employs Google's Ceres Solver as that least-squares solver. As a consequence, the fuse_core::Constraint plugin classes are basically just vehicles for creating the required Ceres Solver objects.
Ceres Solver provides an excellent tutorial on system modeling for least-squares optimization. The following are some important highlights, but reading the Ceres Solver documentation is highly recommended.
The nonlinear least-squares system used by the Ceres Solver is written as:

In Ceres Solver parlance, ρ() is called a "loss function". f() is called a "cost function", which accepts one or more inputs, x. And the inputs, x, are called "parameter blocks". The "parameter blocks" themselves may be single-dimensional or multi-dimensional vectors. The least-squares system consists of many ρ(f()2) terms, and the solver's job is to find the specific values of all the inputs that minimize the sum of the squared costs.
In fuse, a Constraint class models one of the ρ(f()2) terms.
The concept of the "parameter block" is modeled by the Variable classes in fuse. The Constraint merely needs to define which specific Variable identities are to be used as the input to modeled cost function. This is done by accepting, at a minimum, the UUID of each involved Variable.
The derived Constraints provided by the fuse_constraints package go one step further, and require instances of full Variable types rather than just the Variable's UUID. This is done solely to enforce type-safety; e.g. a specific Constraint must involve two Position2DStamped variables, no other variable types are acceptable.
The "cost function" is the main component of the Constraint object. It is responsible for computing the cost to be minimized by the Ceres Solver optimizer. The cost function must implement some sort of equation to generate a score for arbitrary input values. In its most generic form, that equation is written simply as:

where f() is the cost function, x1 through xn are the input Variables, each of which may contain multi-dimensional data, and ri are one or more dimensions of the computed costs. In Ceres Solver notation, the ri terms are called "residuals".
This places very few limits on the form these equations take. They must accept one or more inputs, and must produce one or more outputs. However, in practice there are two common forms for cost functions.
An observation model, sometimes called a sensor model, predicts a sensor measurement based on the current estimates of the system Variables. The cost is then computed as the difference between the predicted sensor measurement and the actual sensor measurement, normalized by the measurement uncertainty.

where z is the sensor measured, h() is the sensor prediction function, and Σ is the covariance matrix. Within the least-squares minimization, the entire cost function will get squared. By dividing by the square root of the covariance, we effectively divide the squared error by the full covariance in the least-squares formulation. The inverse of the covariance matrix is called the "information matrix", and thus we are normalizing by the square root information matrix here.
A state transition model, sometimes called a motion model, predicts the value of a future Variable based on the current estimates of the system Variables. This is generally used to enforce a physical model of the system, such as known vehicle kinematics.

where xt is the current Variable estimate for time t, xt-1 is the current Variable estimate for time t-1, f() is the state prediction function that implements the desired kinematic or dynamic model (apologies for using f() in two places, but f() is the standard naming for the state transition model in Kalman filter literature), and Σ is some estimate of the model prediction uncertainty. Again, we normalize by the square root of the covariance matrix so that the least-squares formulation is normalized by the full covariance matrix.
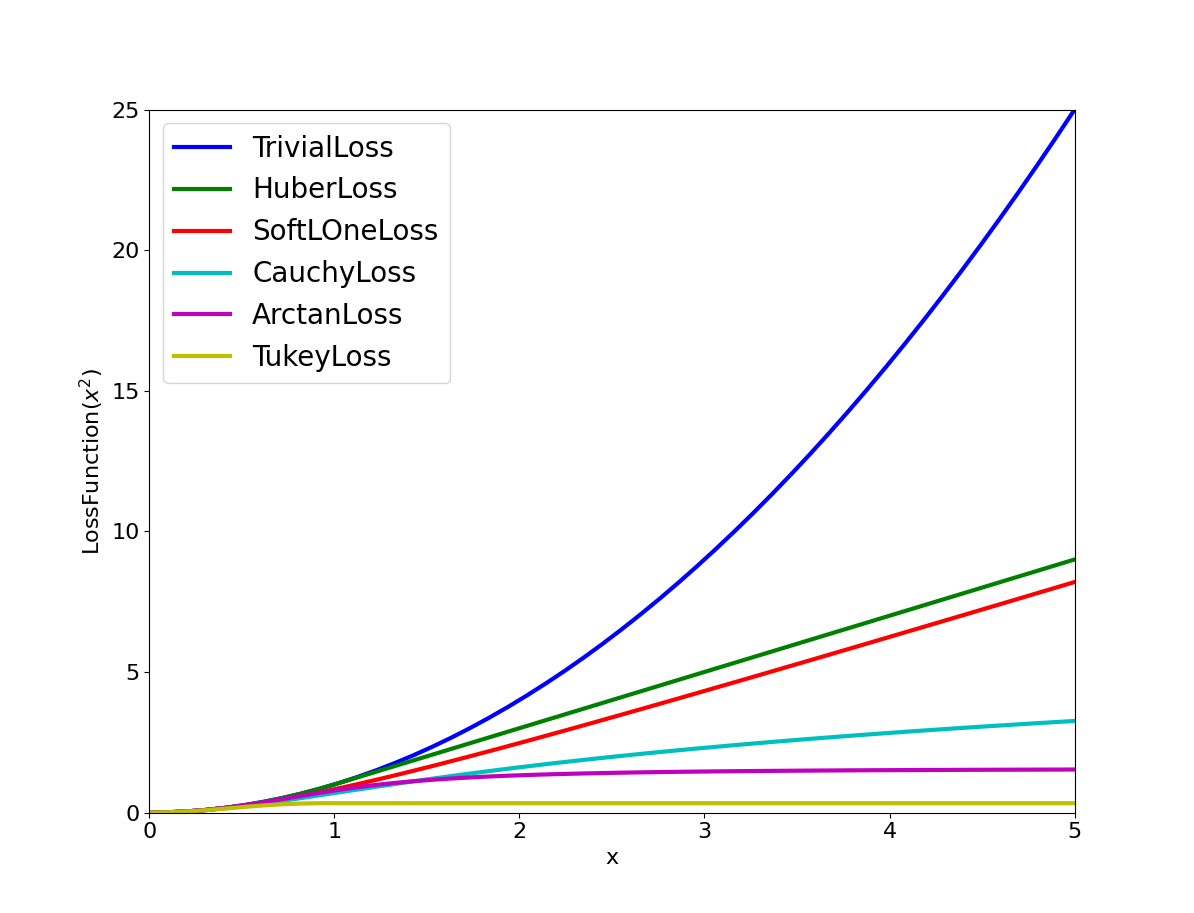
The "loss function" is an optional function that may be applied to the computed squared cost before optimization. In practice, loss functions are used to reduce the impact of incorrect or outlier constraints that are included in the least-squares problem. By default, the loss function is the identity function, which means that deviations from the ideal input values for that cost function will have a quadratic effect on the optimization. If erroneous constraints may be added to the system, this quadratic effect can lead to poor optimized results. Various loss functions are provided by Ceres Solver that reduce the impact of cost functions with very high costs. The Huber Loss Function is a common choice, which applies a quadratic effect for small costs, and a linear effect for large costs. And of coarse, you can implement your own loss functions if the desired function is not available from Ceres Solver itself.
For additional information, see the Loss Function section of the Ceres Solver documentation.
Like basically everything in fuse, the Constraint system is designed to be extensible. The
fuse_core::Constraint base class defines the minimum interface
required for all derived Constraints.
-
Constraint::uuid() -> fuse_core::UUIDEach derived class is required to return a unique ID to act as the identity of the Constraint. Unlike the Variables, each generated derived Constraint object is unique. It is completely valid to produce two Constraints of the same type that involve the same Variables. Consequently, a random UUID is generated for each constructed Constraint. This is performed by the base class; derived classes do not need to implement this function..
-
Constraint::variables() -> vector<fuse_core::UUID>Each derived class is required to provide read-only access to the ordered collection of Variable UUIDs involved with the derived Constraint. The base class holds the collection, and provides the read-only accessor. Derived classes are expected to provide the collection of Variable UUIDs to base class during construction.
-
Derived::type() -> std::stringAll derived Constraints must implement a
type()method that returns the fully-qualified class name. This is of the formnamespace::ClassName. Under most circumstances, the base class implementation will return the correct class name. However, templated Constraints may need to override thetype()method to return the desired name. -
Derived::print(std::ostream& stream)It's nice to be able to print important information during debugging. Each derived Constraint is required to implement a
print()method, but the details of exactly what to print are left to the derived Constraint class designer. At a minimum, the Constrainttype(),uuid(), and involved variables are suggested. -
Derived::clone() -> fuse_core::Constraint::UniquePtrAll derived Constraints are required to implement a
clone()method. This should be implemented asreturn Derived::make_unique(*this). Because this definition requires the use of the derived type, a common implementation could not be provided in the base class. -
Derived::costFunction() -> ceres::CostFunction*All derived classes must implement the
costFunction()method, and return a valid Ceres SolverCostFunctionpointer. Ceres Solver will take ownership of the loss function pointer and delete it when appropriate. There are a fewCostFunctionobjects available within the Ceres Solver code base, and several additional ones available in the fuse_constraints package. However, it is expected that most derived classes will need to implement theirceres::CostFunctionas well. This is how the author of the derived class is able to model the specific behavior of a sensor or vehicle. See the Ceres documentation for details on implementing aceres::CostFunction. Additionally, see the documentation about implementing derivatives within Ceres Solver. Ceres Solver supports a powerful automatic derivative system, in addition to numerical and analytic derivatives. This is one of the features that drove the selection of Ceres Solver as the optimization engine in fuse. -
Derived::lossFunction() -> ceres::LossFunction*By default, the
lossFunction()method will return anullptr, which indicates that a "unity" loss function should be used. Optionally, derived classes may override thelossFunction()method to return a pointer to the loss function of their choice. Ceres Solver will take ownership of the loss function pointer and delete it when appropriate. -
SMART_PTR_DEFINITIONS(Derived);It is highly recommended that all derived Constraints include
SMART_PTR_DEFINITIONS(Derived);in the public interface. This defines some common smart pointer aliases, such asDerived::SharedPtrandDerived::UniquePtr.
As a concrete example, we will review the details of AbsolutePose2DStampedConstraint class provided in the
fuse_constraints package. For illustrative purposes, some of the more advanced options of
this constraint have been omitted in the code sample below.
class AbsolutePose2DCostFunctor
{
private:
fuse_core::Matrix3d A_;
fuse_core::Vector3d b_;
public:
AbsolutePose2DCostFunctor(const fuse_core::Matrix3d& A, const fuse_core::Vector3d& b) :
A_(A),
b_(b)
{}
template <typename T>
bool operator()(const T* const position, const T* const orientation, T* residual) const
{
Eigen::Map<Eigen::Matrix<T, 3, 1>> residuals_map(residual);
residuals_map(0) = position[0] - T(b_(0));
residuals_map(1) = position[1] - T(b_(1));
residuals_map(2) = orientation[0] - T(b_(2));
wrapAngle2D(residuals_map(2));
residuals_map.applyOnTheLeft(A_.template cast<T>());
return true;
}
};
class AbsolutePose2DStampedConstraint : public fuse_core::Constraint
{
private:
fuse_core::Vector3d mean_;
fuse_core::Matrix3d sqrt_information_;
public:
SMART_PTR_DEFINITIONS(AbsolutePose2DStampedConstraint);
AbsolutePose2DStampedConstraint(
const fuse_variables::Position2DStamped& position,
const fuse_variables::Orientation2DStamped& orientation,
const fuse_core::Vector3d& mean,
const fuse_core::Matrix3d& covariance) :
fuse_core::Constraint{position.uuid(), orientation.uuid()},
mean_(mean),
sqrt_information_(covariance.inverse().llt().matrixU())
{}
void print(std::ostream& stream = std::cout) const override
{
stream << type() << "\n"
<< " uuid: " << uuid() << "\n"
<< " position variable: " << variables_.at(0) << "\n"
<< " orientation variable: " << variables_.at(1) << "\n"
<< " mean: " << mean_.transpose() << "\n"
<< " sqrt_info: " << sqrtInformation() << "\n";
}
fuse_core::Constraint::UniquePtr clone() const override
{
return AbsolutePose2DStampedConstraint::make_unique(*this);
}
ceres::CostFunction* costFunction() const override
{
return new ceres::AutoDiffCostFunction<AbsolutePose2DCostFunctor, 3, 2, 1>(
new AbsolutePose2DCostFunctor(sqrt_information_, mean_));
}
const fuse_core::Vector3d& mean() const { return mean_; }
const fuse_core::MatrixXd& sqrtInformation() const { return sqrt_information_; }
};Now let's examine the class details step by step.
First, we need a ceres::CostFunction object that implements our desired model. A 2D pose prior models sensors that
measure the full robot pose in a global coordinate frame. Things like GPS or scan matching to a prior map could be
modeled this way. Our cost function will follow the "observation model", where the input variables will be used to
predict the sensor measurement, and the cost will be the different between the measured and the prediction normalized
by the measurement uncertainty.

We will make use of Ceres Solver's automatic derivative system to compute the Jacobians. For that to work, we must
implement the cost function equation as a functor object (has an operator() method). To compute the cost, our
functor will need access to the measurement vector (3x1 vector) and the measurement uncertainty. Holding the
uncertainty as a square root information matrix (3x3 upper triangular matrix) is convenient for implementing the
above cost equation. By convention, the measurement vector is named b and the square root information matrix is
named A.
class AbsolutePose2DCostFunctor
{
private:
fuse_core::Matrix3d A_;
fuse_core::Vector3d b_;
public:
AbsolutePose2DCostFunctor(const fuse_core::Matrix3d& A, const fuse_core::Vector3d& b) :
A_(A),
b_(b)
{}Additionally, the functor's operator() method must be a template function, capable of accepting as least double
and ceres::Jet objects as input. Since fuse uses separate Variables to hold the position and orientation data,
our functor must accept two input "parameter blocks". It must also accept a mutable vector used to store the output
costs/residuals.
class AbsolutePose2DCostFunctor
{
public:
template <typename T>
bool operator()(const T* const position, const T* const orientation, T* residual) const;
}And in the body of the operator() method, we need to compute the residuals according to our desired cost equation.
template <typename T>
bool operator()(const T* const position, const T* const orientation, T* residual) const
{
Eigen::Map<Eigen::Matrix<T, 3, 1>> residuals_map(residual);
residuals_map(0) = position[0] - T(b_(0));
residuals_map(1) = position[1] - T(b_(1));
residuals_map(2) = orientation[0] - T(b_(2));
wrapAngle2D(residuals_map(2));
residuals_map.applyOnTheLeft(A_.template cast<T>());
return true;
}The residual_map variable allows us to treat the simple C-style array of residuals as an Eigen matrix object:
Eigen::Map<Eigen::Matrix<T, 3, 1>> residuals_map(residual);such that we can perform matrix multiplications efficiently:
residuals_map.applyOnTheLeft(A_.template cast<T>());The only other thing of note is the special treatment of the orientation.
wrapAngle2D(residuals_map(2));This ensures the orientation error is always minimum phase, treating π/2 and 5π/2 as the same error.
Now that we have our Ceres Solver compatible cost functor implemented, we can create the fuse constraint. All new Constraints must derive from the fuse_core::Constraint base class.
class AbsolutePose2DStampedConstraint : public fuse_core::ConstraintIn the derived class constructor, we specify the required input Variable types to enforce type-safety during Constraint creation. We then just pass the input Variables UUIDs to the base class constructor. Additionally, we pass in the measurement vector and measurement covariance, so that we can generate cost functor instances later.
private:
fuse_core::Vector3d mean_;
fuse_core::Matrix3d sqrt_information_;
public:
AbsolutePose2DStampedConstraint(
const fuse_variables::Position2DStamped& position,
const fuse_variables::Orientation2DStamped& orientation,
const fuse_core::Vector3d& mean,
const fuse_core::Matrix3d& covariance) :
fuse_core::Constraint{position.uuid(), orientation.uuid()},
mean_(mean),
sqrt_information_(covariance.inverse().llt().matrixU())
{}A little bit of linear algebra converts the covariance matrix into the square root information matrix needed by the cost functor.
sqrt_information_(covariance.inverse().llt().matrixU())The derived Constraint uuid() and type() methods are inherited from the base class and do not need to be
overridden. But we do need to provide a print() method. Here we print the Constraint type, UUID, and involved
Variable UUIDs. The details of what to print are left entirely up to the derived class's author.
public:
void print(std::ostream& stream = std::cout) const override
{
stream << type() << "\n"
<< " uuid: " << uuid() << "\n"
<< " position variable: " << variables_.at(0) << "\n"
<< " orientation variable: " << variables_.at(1) << "\n";
}We must also provide a clone() method. Here we used the recommended implementation.
public:
fuse_core::Constraint::UniquePtr clone() const override
{
return AbsolutePose2DStampedConstraint::make_unique(*this);
}And finally, the required costFunction() implementation. We use a combination of the ceres::AutoDiffCostFunction
class and our custom cost functor to create the output ceres::CostFunction pointer. The full details of the
ceres::AutoDiffCostFunction are available here.
But briefly, the ceres::AutoDiffCostFunction template parameters are:
- the functor class used to compute the cost
- the number of produced residuals
- the number of dimensions of the first Variable
- the number of dimensions of the second Variable
We use our cost functor, AbsolutePose2DCostFunctor. The cost functor produces three residuals,
one for each dimension of the 2D pose. The first input Variable is a Position2DStamped, which has two dimensions,
x and y. And the second Variable is an Orientation2dStamped, which has only one dimension, yaw.
public:
ceres::CostFunction* costFunction() const override
{
return new ceres::AutoDiffCostFunction<AbsolutePose2DCostFunctor, 3, 2, 1>(
new AbsolutePose2DCostFunctor(sqrt_information_, mean_);
}We don't want to use a custom loss function, so we use the base class implementation of the required lossFunction()
method.
And finally we reach the recommended but optional implementation details.
public:
SMART_PTR_DEFINITIONS(AbsolutePose2DStampedConstraint);Calling the SMART_PTR_DEFINITIONS macro inside the public region of the derived Variable is not strictly required,
but it is very strongly recommended. This creates some standard aliases for variable smart pointer types, e.g.
AbsolutePose2DStampedConstraint::SharedPtr and AbsolutePose2DStampedConstraint::UniquePtr as well as a some smart
pointer creation functions, e.g.AbsolutePose2DStampedConstraint::make_shared() and
AbsolutePose2DStampedConstraint::make_unique().
public:
const fuse_core::Vector3d& mean() const { return mean_; }
const fuse_core::MatrixXd& sqrtInformation() const { return sqrt_information_; }Providing accessor functions for the additional constructor arguments is also recommended.