This repository contains the project performed in Controle Hinf por Realimentação de Estados Aplicado a um Robô Omnidirecional in python. The code in this repository has some minor differences, as the sampling rate and some robot parameters, to the original project performed in the work.

In the file system_data.py the robot parameters are defined and its state space representation is obtained.
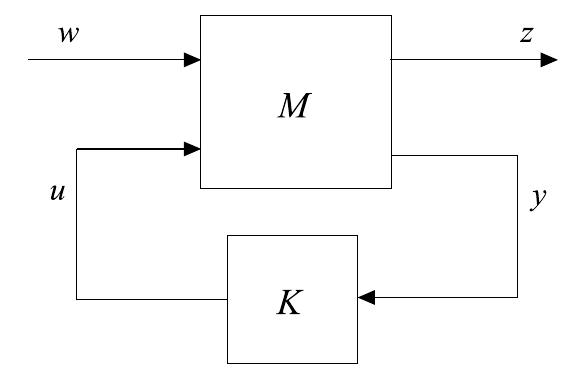
In the file project.py, functions to computer the H-infinty controller for an arbitrary system on the general form are defined.
In the notebook evaluation_SCS the results of projects with the SCS solver are analyzed, a controller is chosen and simulations are performed.
The folder robot contains code for the communication with the robot.