Attitude stabilization
Attitude is the name given to the orientation of a vehicle around it's center of mass, with respect to a reference frame. It is given by three angles corresponding to the rotations around three axes. Depending on the engineering domain (naval, space, aviation, ...) the definition and the names of those angles and axes vary.
In aviation the 3 possible rotations are:
- Roll: rotation around the axis pointing to the direction the aircraft is heading on.
- Pitch: rotation around an axis perpendicular to the roll axis an in the same plane of the aircraft.
- Yaw: rotation around an axis vertical to the aircraft as given by the right-hand rule. Changing it doesn't produce any displacement but a change in direction the aircraft is moving on. It is also known as heading
The principal characteristic of rotorcrafts is that they can stand on air in a fixed spot, if it's attitude angles are stabilized and a sufficient thrust is applied to compensate gravity.
To accomplish the task it is necessary to design a control law that can actuate on the four motors of the quadcopter so the it's attitude is asymptotically stable.
Equilibrium in height is obviously controlled by the amount of applied thrust to the motors, but rotations are not trivial. Given the configuration in the picture, actuation on attitude is done as follows:
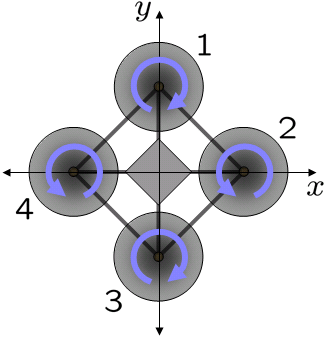
- Roll and Pitch: A quadrotor adjusts its pitch or roll by applying more thrust to one rotor and less thrust to its diametrically opposite rotor.

- Yaw: A quadrotor adjusts its yaw by applying more thrust to rotors rotating in one direction.

So the thrust applied to motors can be seen as a superposition of these actuations:
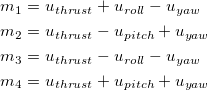
Where u are control efforts for each actuation component and m the resulting thrust for each motor. The units depend on the range of valid inputs.
Relationship between control effort and desired state can be done using several types of controllers. For now we are using a PID strategy with three controllers, one for each control input.
Wall-E Documentation by IEEE Student Branch of Granada is licensed under a Creative Commons Attribution-ShareAlike 4.0 International License.
