Using Klampt for ergonomics studies #62
Comments
|
This could be possible if you have a virtual human model. Perhaps you could find a URDF human model, and load it into the RobotPose program to pose it by hand. More sophisticated analysis, like automated reaching, defining muscle effort, etc. would require custom development on top of the Klampt functionality which is limited to dynamics modeling, planning, and simulation. Some CAD software has similar functionality. See Jack for instance: https://en.m.wikipedia.org/wiki/Jack_(human_modeling) |
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
How to do ergonomics stuff with Klampt?
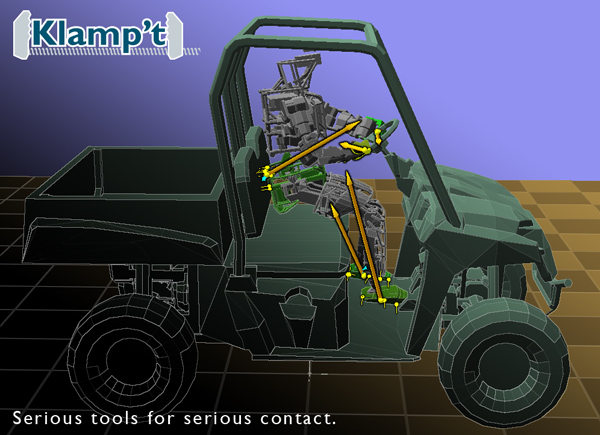
I am actually not related to robotics at all, but I would like to do ergonomic studies on digital models of forklifts, which seems very related to the above picture.
The text was updated successfully, but these errors were encountered: