aruco码的图片在aruco_mapping2/arucotags文件夹下,里面有1-10的arucotag码。
可以将其打印在A4纸上。
如果要生成更多的arucotag可以在这个网址下生成: Aruco Marker Generator
打印完毕之后, 将ArucoTag粘贴到地面/墙面上。
PS: 在显示器上显示也是可以的。

确定usb摄像头的设备号,还有其他参数。 相关文件
注: 均需要修改
- calibration.launch
- mapping.launch
- location.launch
<!--指定USB摄像头设备编号-->
<arg name="video_device" value="/dev/video0" />
<!--画面宽度-->
<arg name="image_width" value="640"/>
<!--画面高度-->
<arg name="image_height" value="480" />
<!--视频流编码-->
<arg name="pixel_format" value="yuyv" />
<!--设定摄像头的名字-->
<arg name="camera_name" value="usb_cam"/>
<!--设定摄像头的Frame Id-->
<arg name="camera_frame_id" value="usb_cam" />
<!-- IO方法-->
<arg name="io_method" value="mmap"/>
<!--标定文件的路径-->
<arg name="camera_info_url" value="package://aruco_mapping2/data/usb_cam.yaml"/>准备一个相机标定板,用A4纸打印出棋盘, 或者使用专门的标定板。
见附件 aruco_mapping2/data/check-108.pdf

修改标定板相关的参数配置. 相关文件
- calibration.launch
<!-- 标定板的格子角点数 (格子行数-1) × (格子列数-1)-->
<arg name="chess_board_size" value="11x7"/>
<!-- 格子的尺寸 -->
<arg name="chess_square_size" value="0.021" />运行标定程序
roslaunch aruco_mapping2 calibration.launch
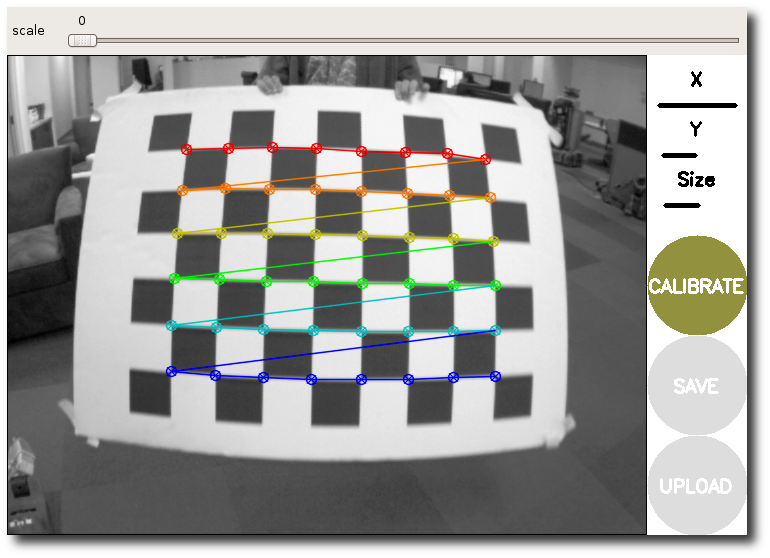
标定软件的使用流程见文章ROS-单目相机标定流程
标定完成后会生成usb_cam.yaml,里面存储了相机的相机内参,畸变系数等信息.
标定完成结束后,并不会有什么提示, 标定文件默认会存储在~/.ros/
标定文件格式是yaml, 样例数据如下:
image_width: 640
image_height: 480
camera_name: usb_cam
camera_matrix:
rows: 3
cols: 3
data: [913.8178330961418, 0, 340.4649044011426, 0, 910.4095170640226, 183.5485783592703, 0, 0, 1]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [-0.3943122346178097, 0.1928901709500203, 0.0005343126345678638, -0.003417132633234658, 0]
rectification_matrix:
rows: 3
cols: 3
data: [1, 0, 0, 0, 1, 0, 0, 0, 1]
projection_matrix:
rows: 3
cols: 4
data: [868.0504760742188, 0, 341.267164801322, 0, 0, 880.5822143554688, 180.5321460233499, 0, 0, 0, 1, 0]文件保存路径一般都在用户主目录的.ros/camera_info文件夹中.
fange@cr:~/.ros/camera_info$ cd ~/.ros/camera_info/
fange@cr:~/.ros/camera_info$ ls
usb_cam.yaml复制该文件至项目目录aruco_mapping2/data 中.
接下来进行建图。 修改aruco地图的相关配置。
相关文件
- mapping.launch
- location.launch
<!-- Aruco Marker的尺寸(宽高相同) 单位m-->
<arg name="marker_size" value="0.165"/>
<!-- 基准码(世界坐标系)的ID-->
<arg name="base_aruco_id" value="1"/>
<!-- 地图中码的个数 -->
<arg name="aruco_num" value="10"/>
<!--采样帧的个数-->
<arg name="frame_sample_num" value="1000"/>
<!--码与码之间的最远距离-->
<param name="max_distance" value="100"/>
运行建图的代码, 手持相机移动采集码与码之间的变化, 注意画面中要至少有两个Aruco码。
roslaunch aruco_mapping2 mapping.launch建图完成之后, 就会在aruco_mapping2/data生成如下.bin文件
arucos_dict.bin码与码相对变换的原始记录文件aruco_map.bin记录aruco地图信息color_dict.bin记录每个码的颜色(随机生成)
RVIZ上可以显示出来创建的地图,代表建图完成。

CTRL + C结束建图进程。
roslaunch aruco_mapping2 location.launch
