-
-
-
-
-
-
-

-
-
-
-
-
-
-
-

-
-
-
-
-
-
-
-
-
diff --git a/book/install.html b/book/install.html
deleted file mode 100644
index 02e5c8f..0000000
--- a/book/install.html
+++ /dev/null
@@ -1,656 +0,0 @@
-
Installation Instructions
-
-
These instructions are aimed at readers of Owl Online Tutorials,
- though much of what you find here will be useful for anyone who
- wants to get a good working OCaml installation.
-
-
At the highest level, here's what you need to do:
-
-
- - Get OPAM installed
-
- - Build OCaml 4.06.0 or later using OPAM or your OS package manager
-
- - With OPAM, install the key libraries that you need to work
- through the examples in the book
-
- - Install Utop, a
- modern interactive toplevel with command history, tab
- completion, and defaults that are tuned to work with the
- examples in Owl Online Tutorials,
-
- - Set up your editing environment.
-
- - Optionally install merlin, a
- tool for providing IDE-like functionality like auto-completion,
- as well as ocp-indent, a
- source code indenter. Both work with emacs and vim, and can be
- adapted to other editors.
-
-
-
Note that Windows is not currently supported by the examples
- in Owl Online Tutorials or by OPAM, although it is being worked on.
- Until that's ready, we recommend using a virtual machine running
- Debian Linux on your local machine, or
-Docker for Windows.
-
-
Let's get started.
-
-
Getting OPAM
-
-
The easiest way to install OPAM is through your OS's package
- manager. In most cases, installing OPAM will also trigger the
- installation of OCaml. The version installed isn't important,
- since we can use OPAM itself to install other versions of the
- compiler.
-
-
Here are platform-specific instructions.
-
-
Mac OS X
-
-
If you don't already have a package manager set up, try
- installing homebrew. You can find information on installing
- homebrew here. make sure you have
- the latest XCode (and Command Line Tools for XCode) installed
- from the App Store first.
-
-
You can then install OPAM using brew.
-
-brew install opam
-
-
-
Another popular package manager on Mac OS X is MacPorts, which also has an OPAM
- package.
-
-sudo port install opam
-
-
-
Ubuntu Linux
-
-
14.04 and higher comes with recent versions of OCaml and opam. No PPA
- needed.
-
-sudo apt-get install curl build-essential m4 zlib1g-dev libssl-dev ocaml ocaml-native-compilers opam
-
-
-
Debian Linux
-
-
Debian's OCaml packages aren't yet at 4.06.0, and so you will
- need to compile it from sources. If you are using the
- Debian 9 stable stream, then OPAM 1.2.2 will
- be available.
-
-
Arch Linux
-
-
OPAM is available from the AUR (Arch User Repository). You can
- install OPAM using yaourt:
-
-sudo yaourt -S opam
-
-
-
Or directly using pacman.
-
-sudo pacman -S base-devel
-wget https://aur.archlinux.org/packages/op/opam/opam.tar.gz
-tar -xvf opam.tar.gz && cd opam
-makepkg
-sudo pacman -U opam-<version>.pkg.tar.xz
-
-
-
Building from source
-
-
On platforms not listed above, you'll need to install OPAM
- from source, and to do that you'll need OCaml installed first.
- Some platforms, including Fedora Linux, have OCaml packages that
- you can install but not OPAM packages. You can build OPAM on
- OCaml version 4.02.1 or later.
-
-
To install OCaml from source, you'll first need a C compiler,
- generally gcc or llvm.
-
-
The following is enough to get OCaml installed on most
- platforms.
-
-curl -OL https://github.com/ocaml/ocaml/archive/4.01.tar.gz
-tar -zxvf 4.01.tar.gz
-cd ocaml-4.01
-./configure
-make world world.opt
-sudo make install
-
-
-
If you have problems with any of the above, read the
- INSTALL file in the tar file.
-
-
Installing OCaml locally
-
-
The installation step described above requires administrator
- privileges. You can also install it in your home directory by
- passing the prefix option to the configuration
- script:
-
-./configure -prefix $HOME/my-ocaml
-
-
-
Once the installation is completed into this custom location,
- you will need to add $HOME/my-ocaml/bin to your
- PATH, normally by editing ~/.bashrc or
- ~/.profile. You shouldn't really do this unless you
- have special reasons, so try to install binary packages before
- trying a source installation.
-
-
Installing OPAM
-
-
If the binary packages aren't available for your system,
- you'll need to install the latest OPAM release from source. You
- can follow the online quick install
- guide.
-
-
Configuring OPAM
-
-
The entire OPAM package database is held in the
- .opam directory in your home directory, including
- compiler installations. On Linux and Mac OS X, this will be the
- ~/.opam directory, which means you don't need
- administrative privileges to configure it. If you run into
- problems configuring OPAM, just delete the whole
- ~/.opam directory and start over.
-
-
Let's begin by initialising the OPAM package database. This
- will ask you a few interactive questions at the end. It's safe to
- answer yes to these unless you want to manually control the
- configuration steps yourself as an advanced user.
-
-opam init
-<...>
-=-=-=-= Configuring OPAM =-=-=-=
-Do you want to update your configuration to use OPAM ? [Y/n] y
-[1/4] Do you want to update your shell configuration file ? [default: ~/.profile] y
-[2/4] Do you want to update your ~/.ocamlinit ? [Y/n] y
-[3/4] Do you want to install the auto-complete scripts ? [Y/n] y
-[4/4] Do you want to install the `opam-switch-eval` script ? [Y/n] y
-User configuration:
- ~/.ocamlinit is already up-to-date.
- ~/.profile is already up-to-date.
-Gloabal configuration:
- Updating <root>/opam-init/init.sh
- auto-completion : [true]
- opam-switch-eval: [true]
- Updating <root>/opam-init/init.zsh
- auto-completion : [true]
- opam-switch-eval: [true]
- Updating <root>/opam-init/init.csh
- auto-completion : [true]
- opam-switch-eval: [true]
-
-
-
You only need to run this command once, and it will create the
- ~/.opam directory and sync with the latest package
- list from the online OPAM database.
-
-
When the init command finishes, you'll see some
- instructions about environment variables. OPAM never installs
- files into your system directories (which would require
- administrator privileges). Instead, it puts them into your home
- directory by default, and can output a set of shell commands
- which configures your shell with the right PATH
- variables so that packages will just work.
-
-
If you choose not to follow the OPAM instructions to add
- itself to your shell profile, you can still configure it
- on-the-fly in your current shell with just one command.
-
-
-eval `opam config env`
-
-
-
This evaluates the results of running opam config
- env in your current shell and sets the variables so that
- subsequent commands will use them. This only works with
- your current shell and it can only be automated for future shells
- by adding the line to your login scripts. On Mac OS X you should
- typically use ~/.profile, and ~/.bashrc
- on most Linux setups.
-
-
OPAM isn't unusual in this approach; the SSH
- ssh-agent also works similarly, so if you're having
- any problems just hunt around in your configuration scripts to
- see how that's being invoked.
-
-
If you answered yes to the auto-complete scripts
- question during opam init, this should have all been
- set up for you. You can verify this worked by seeing if the
- OCAML_TOPLEVEL_PATH environment variable is set. You
- can do this in bash as follows.
-
-printenv OCAML_TOPLEVEL_PATH
-/Users/myusername/.opam/4.06.0/lib/toplevel
-
-
-
The next step is to make sure we have the right compiler
- version installed.
-
-opam switch
-system C system System compiler (4.00.1)
--- -- 4.04.2 Official 4.04.2 release
--- -- 4.05.0 Official 4.05.0 release
--- -- 4.06.0 Official 4.06.0 release
-
-
-
If, as in this case, your system compiler is older than
- 4.06.0, you should install a more up to date version
- of the compiler, as shown below.
-
-opam switch 4.06.0
-eval `opam config env`
-
-
-
The switch itself will take around ten or fifteen
- minutes on a modern machine, and will download and install the
- OCaml compiler within the ~/.opam directory). You
- can install multiple compilers at once, and switching between
- them once they're installed is fast.
-
-
The new compiler and all libraries associated with it will be
- installed in ~/.opam/4.01.0.
-
-
Finally, we're ready to install the libraries and tools we'll
- need for the book. The most important ones are core,
- which provides the standard library that all the examples in the
- book are based on, and utop, which is the
- interactive toplevel that you can use for working through the
- examples.
-
-opam install core utop
-
-
-
This will take about five or ten minutes to build, and will
- install the requested packages along with a bunch of
- dependencies. But there are other libraries that will be useful
- as you go through the book that you might as well install
- now.
-
-opam install async yojson core_extended core_bench cohttp async_graphics cryptokit menhir
-
-
-
If some of the above don't work, don't worry too much. Most of
- them come up in only a few places in the book. (There are some
- known problems right now: in particular,
- core_extended doesn't install cleanly on recent
- versions of OS X, due to an issue with the re2
- library it depends on. That is expected to be resolved soon.)
-
-
Note that if you've installed utop and can't
- launch it from the shell, make sure you've run eval `opam
- config env` in this shell. In general, you should just get
- this set up as part of your shell init scripts, as described
- earlier.
-
-
Setting up and using utop
-
-
When you first run utop, you'll find yourself at
- an interactive prompt with a bar at the bottom of the screen. The
- bottom bar dynamically updates as you write text, and contains
- the possible names of modules or variables that are valid at that
- point in the phrase you are entering. You can press the
- <tab> key to complete the phrase with the
- first choice.
-
-
The ~/.ocamlinit file in your home directory
- initializes utop with common libraries and syntax
- extensions so you don't need to type them in every time. Given
- that you have Core installed, you should update your
- ocamlinit to load Core every time you start
- utop, by adding the following lines.
-
-#use "topfind";;
-#thread;;
-#require "core.top";;
-#require "core.syntax";;
-
-
-
For utop only you could get away with just the
- last two lines, but you need the whole thing if you want the
- traditional ocaml toplevel to work too.
-
-
Note that opam will have already added some lines
- to the file. Also, notice that # is used to mark a
- toplevel directive, not a comment.
-
-
If you want to use Core as your primary standard library, then
- you should open the Core module by default,
- which you can do by appending the following to the end of your
- .ocamlinit.
-
-open Core
-
-
-
When you run utop with these initialization
- rules, it should start up with Core opened and ready to use. If
- you don't open Core by default, then you must
- remember to open it before running any of the interactive
- examples in the book.
-
-
Editors
-
-
Emacs
-
-
These instructions have been tested on emacs 24.2 and should
- work for that version and newer. There are some reports of
- problems with earlier emacsen.
-
-
tuareg is the most commonly used mode for editing
- OCaml code in emacs. You can download it here. You should download
- it and untar it into some subdirectory of your home
- directory.
-
-
Once you've done that, you can add the following rather
- lengthy snippet to your .emacs file.
-
-;; -- common-lisp compatibility if not added earlier in your .emacs
-(require 'cl)
-
-;; -- Tuareg mode -----------------------------------------
-;; Add Tuareg to your search path
-(add-to-list
- 'load-path
- ;; Change the path below to be wherever you've put your tuareg installation.
- (expand-file-name "~/lib/elisp/tuareg"))
-(require 'tuareg)
-(setq auto-mode-alist
- (append '(("\\.ml[ily]?$" . tuareg-mode))
- auto-mode-alist))
-
-;; -- Tweaks for OS X -------------------------------------
-;; Tweak for problem on OS X where Emacs.app doesn't run the right
-;; init scripts when invoking a sub-shell
-(cond
- ((eq window-system 'ns) ; macosx
- ;; Invoke login shells, so that .profile or .bash_profile is read
- (setq shell-command-switch "-lc")))
-
-;; -- opam and utop setup --------------------------------
-;; Setup environment variables using opam
-(dolist
- (var (car (read-from-string
- (shell-command-to-string "opam config env --sexp"))))
- (setenv (car var) (cadr var)))
-;; Update the emacs path
-(setq exec-path (split-string (getenv "PATH") path-separator))
-;; Update the emacs load path
-(push (concat (getenv "OCAML_TOPLEVEL_PATH")
- "/../../share/emacs/site-lisp") load-path)
-;; Automatically load utop.el
-(autoload 'utop "utop" "Toplevel for OCaml" t)
-(autoload 'utop-setup-ocaml-buffer "utop" "Toplevel for OCaml" t)
-(add-hook 'tuareg-mode-hook 'utop-setup-ocaml-buffer)
-
-
-
Once this successfully loads in Emacs, you can run
- utop by doing M-x utop in Emacs. You
- can also use commands like Ctrl-c Ctrl-b to evaluate
- your current buffer in utop, or Ctrl-c
- Ctrl-e to just evaluate a single expression.
-
-
There are more detailed instructions at the utop
- homepage.
-
-
Using Emacs24 packages
-
-
As an alternative to the setup above, here is a simplified
- OCaml setup using MELPA
- packages.
-
-
Add to .emacs.d/init.el
-
-(require 'package)
-(add-to-list 'package-archives
- '("melpa" . "http://melpa.milkbox.net/packages/") t)
-
-
-
Now do M-x package-install and install
- tuareg, utop and
- merlin.
-
-
Then add the rest of the configuration to
- .emacs.d/init.el
-
-(add-hook 'tuareg-mode-hook 'tuareg-imenu-set-imenu)
-(setq auto-mode-alist
- (append '(("\\.ml[ily]?$" . tuareg-mode)
- ("\\.topml$" . tuareg-mode))
- auto-mode-alist))
-(autoload 'utop-setup-ocaml-buffer "utop" "Toplevel for OCaml" t)
-(add-hook 'tuareg-mode-hook 'utop-setup-ocaml-buffer)
-(add-hook 'tuareg-mode-hook 'merlin-mode)
-(setq merlin-use-auto-complete-mode t)
-(setq merlin-error-after-save nil)
-
-
-
Vim
-
-
Vim users can use the built-in style, and ocaml-annot may also be
- useful. For a more richly-featured setup, see the section on
- Merlin below.
-
-
Eclipse
-
-
Eclipse is a popular IDE usually used for Java development.
- The OCaml Development Tools
- (ODT) project provides equivalent IDE features for editing
- and compiling OCaml code, such as automatic compilation and name
- completion. Installation instructions can be found here
-
-
Other editors
-
-
There are lots of other editors, and many of them come with
- built-in OCaml modes. These includes TextMate and Sublime Text
- for the Mac, and countless others.
-
-
Cross-editor tools
-
-
There are a number of tools that are compatible with multiple
- editors that can help you work more effectively with OCaml. Two
- of the best are merlin and ocp-indent,
- which we'll describe below. Note that these are very much
- optional. You might want to get started with the book before
- getting back to setting these up.
-
-
Merlin
-
-
Merlin provides a number of advanced IDE-like features,
- including:
-
-
- - context-sensitive auto-completion
-
- - interactive type-querying (i.e., you can ask it, "what is
- the type of this expression")
-
- - error reporting -- it will highlight parts of your code
- that don't compile as you go.
-
-
-
You can install merlin with OPAM:
-
-opam install merlin
-
-
-
Then you will need to add configuration for your editor. The
- following examples assume Merlin has been installed through OPAM
- as above.
-
-
Emacs
-
-
A summary follows -- for more complete information, see
-
- Merlin's Emacs documentation.
-
-;; -- merlin setup ---------------------------------------
-
-(setq opam-share (substring (shell-command-to-string "opam config var share") 0 -1))
-(add-to-list 'load-path (concat opam-share "/emacs/site-lisp"))
-(require 'merlin)
-
-;; Enable Merlin for ML buffers
-(add-hook 'tuareg-mode-hook 'merlin-mode)
-
-;; So you can do it on a mac, where `C-<up>` and `C-<down>` are used
-;; by spaces.
-(define-key merlin-mode-map
- (kbd "C-c <up>") 'merlin-type-enclosing-go-up)
-(define-key merlin-mode-map
- (kbd "C-c <down>") 'merlin-type-enclosing-go-down)
-(set-face-background 'merlin-type-face "#88FF44")
-
-;; -- enable auto-complete -------------------------------
-;; Not required, but useful along with merlin-mode
-(require 'auto-complete)
-(add-hook 'tuareg-mode-hook 'auto-complete-mode)
-
-
-
Here are some of the more useful key commands that merlin
- provides:
-
-
- C-c C-t: merlin-type-enclosing:
- show you the type of the current expression.
- C-<up> and C-<down> can
- then be used to look at the types of enclosing expressions, or
- drill down to smaller ones.C-c <TAB>: if you have auto-complete set
- up, this gives you a list of possible auto-completions, along
- with their types. You can use C-s to search within
- that list.C-c C-l: to go to the definition of the value
- under your cursor.C-c r: to restart merlin if it gets
- confused
-
-
Vim
-
-
A summary follows -- for more complete information, see
-
- Merlin's Vim documentation and :h merlin.txt
- after installing.
-
-" Your vimrc
-filetype plugin indent on
-syntax enable
-
-" Vim needs to be built with Python scripting support, and must be
-" able to find Merlin's executable on PATH.
-if executable('ocamlmerlin') && has('python')
- let s:ocamlmerlin = substitute(system('opam config var share'), '\n$', '', '''') . "/merlin"
- execute "set rtp+=".s:ocamlmerlin."/vim"
- execute "set rtp+=".s:ocamlmerlin."/vimbufsync"
-endif
-
-
-
As a one-time step after installation, index the documentation
- in Vim's help system:
-
-:execute "helptags " . substitute(system('opam config var share'), '\n$', '', '''')
-
-
-
Some highlights of the functionality this enables:
-
-
- - Autocompletion with Vim's omnicomplete system:
-
<C-x><C-o>
-
- - Quick type checking with keybindings -- the defaults use
-
LocalLeader, which is normally backslash
- (\) by default:
-
-
- \t: type of expression under the cursor
- (also works with a visual selection).\n / \p: expand/contract the
- expression(s) to type check.
-
-
- :Locate [identifier]: go to the definition of
- given identifier or the one under the cursor.:Reload: if Merlin gets confused following
- build changes like new packages.:GotoDotMerlin: edit the .merlin
- project configuration (see below).
-
-
The plugin can integrate with some other popular Vim plugins
- such as Syntastic and neocomplcache -- see :help
- merlin.txt for pointers.
-
-
Tell Merlin about your project layout
-
-
Regardless of which editor you use, you need to tell Merlin a
- bit about the build environment you're working with in order for
- it to work properly. This is done by creating a
- .merlin file. If you're building applications based
- on Core and Async using the corebuild script (which
- is built on top of ocamlbuild), then the following
- is a good starting point.
-
-S .
-B _build
-PKG core
-PKG async
-PKG core_extended
-EXT nonrec
-
-
-
See the Merlin README for complete details of the file
- format.
-
-
ocp-indent
-
-
ocp-indent is a source-code indenter which
- includes a command-line tool, library and integration with emacs
- and vi. It does a better job than most editor modes, including
- tuareg, and has the advantage that it can be used as a
- command-line tool and be integrated into multiple editors, so you
- get consistent indentation across tools.
-
-
You can install it with opam:
-
-opam install ocp-indent
-
-
-
Emacs
-
-
After installing through OPAM, simply load the file as follows
- to override tuareg-mode's indentation:
-
-(setq opam-share (substring (shell-command-to-string "opam config var share") 0 -1))
-(load-file (concat opam-share "/typerex/ocp-indent/ocp-indent.el"))
-
-
-
Vim
-
-
After installing through OPAM, simply add this
- autocmd to your Vim configuration:
-
-" Your vimrc
-autocmd FileType ocaml execute "set rtp+=" . substitute(system('opam config var share'), '\n$', '', '''') . "/ocp-indent/vim/indent/ocaml.vim"
-
diff --git a/book/introduction/dune b/book/introduction/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/introduction/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/introduction/dune.inc b/book/introduction/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/introduction/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/introduction/prelude.ml b/book/introduction/prelude.ml
deleted file mode 100644
index f6fc191..0000000
--- a/book/introduction/prelude.ml
+++ /dev/null
@@ -1,8 +0,0 @@
-#require "owl-top,owl-plplot";;
-
-open Owl
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/linear-algebra/dune b/book/linear-algebra/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/linear-algebra/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/linear-algebra/dune.inc b/book/linear-algebra/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/linear-algebra/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/linear-algebra/prelude.ml b/book/linear-algebra/prelude.ml
deleted file mode 100644
index 8c67752..0000000
--- a/book/linear-algebra/prelude.ml
+++ /dev/null
@@ -1,10 +0,0 @@
-#require "owl-top,owl-plplot";;
-
-open Owl
-open Bigarray
-open Owl_plplot
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/maths/dune b/book/maths/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/maths/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/maths/dune.inc b/book/maths/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/maths/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/maths/prelude.ml b/book/maths/prelude.ml
deleted file mode 100644
index 8c67752..0000000
--- a/book/maths/prelude.ml
+++ /dev/null
@@ -1,10 +0,0 @@
-#require "owl-top,owl-plplot";;
-
-open Owl
-open Bigarray
-open Owl_plplot
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/ndarray/dune b/book/ndarray/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/ndarray/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/ndarray/dune.inc b/book/ndarray/dune.inc
deleted file mode 100644
index e007ba6..0000000
--- a/book/ndarray/dune.inc
+++ /dev/null
@@ -1,19 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- (:y4 ../../examples/code/ndarray/interface_00.mli)
- (:y3 ../../examples/code/ndarray/interface_01.mli)
- (:y2 ../../examples/code/ndarray/interface_02.mli)
- (:y1 ../../examples/code/ndarray/interface_03.mli)
- (:y0 ../../examples/code/ndarray/interface_04.mli)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected)
- (diff? %{y4} %{y4}.corrected)
- (diff? %{y3} %{y3}.corrected)
- (diff? %{y2} %{y2}.corrected)
- (diff? %{y1} %{y1}.corrected)
- (diff? %{y0} %{y0}.corrected))))
diff --git a/book/ndarray/prelude.ml b/book/ndarray/prelude.ml
deleted file mode 100644
index 737f02d..0000000
--- a/book/ndarray/prelude.ml
+++ /dev/null
@@ -1,9 +0,0 @@
-#require "owl-top";;
-
-open Owl
-open Bigarray
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/neural-network/dune b/book/neural-network/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/neural-network/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/neural-network/dune.inc b/book/neural-network/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/neural-network/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/neural-network/prelude.ml b/book/neural-network/prelude.ml
deleted file mode 100644
index 0d078df..0000000
--- a/book/neural-network/prelude.ml
+++ /dev/null
@@ -1,10 +0,0 @@
-#require "owl-top";;
-
-open Owl
-open Owl.Utils
-open Bigarray
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/nlp/README.md b/book/nlp/README.md
deleted file mode 100644
index 5968641..0000000
--- a/book/nlp/README.md
+++ /dev/null
@@ -1,737 +0,0 @@
-# Natural Language Processing
-
-Text is a dominant media type on the Internet along with images, videos, and audios. Many of our day-to-day tasks involve text analysis. Natural language processing (NLP) is a powerful tool to extract insights from text corpora.
-
-## Introduction
-
-NLP is a field of research that helps computers understand, interpret and manipulate human language.
-It combines many disciplines, including linguistics, computer science, information engineering, and artificial intelligence, etc.
-NLP is often considered difficult in computer science, since the rules that lie behind natural languages are not always easy for computers to understand.
-For example, the abstract ideas such as sarcastic and humour are still difficult to convey to computers.
-Besides, in the real world the data that generated by conversations and tweets etc. are unstructured and cannot be fit well into the traditional row and column structure. The unstructured data are difficult to manipulate.
-
-NLP is a large topic that covers many different advanced problems.
-*Information Retrieval* focuses on recognising structured information such as key relations or event types from given unstructured information. The Named Entity Recognition task belongs to this category.
-*Machine Translation* is one of the most important fields in NLP.
-It involves translating text or speech from one language to another using computer programs.
-Currently we are still far from being able to build translation systems that can match the quality of human translation.
-*Text generation* also covers a lot of NLP tasks.
-The generated text can be used to explain or describe certain input, combining information from multiple sources into a summary, or for interactive conversation with human participants.
-Research in these fields often needs linguistic knowledge, and deep learning approaches have also achieved good performance on many NLP tasks.
-
-We surely cannot cover all of them in this one single chapter, perhaps not even a whole book.
-To this end, in this chapter we mainly focus on information retrieval, and specifically, topic modelling.
-In this chapter, we will use a [news dataset](https://github.com/ryanrhymes/owl_dataset/raw/master/news.txt.gz) crawled from the Internet. It contains 130000 pieces of news from various sources, each line in the file representing one entry.
-For example we the first line/document is:
-
-```text
-a brazilian man who earns a living by selling space for tattoo adverts on his body is now looking for a customer for his forehead , it appears ... borim says when clients do n't pay or cancel an ad , he crosses them out . " skinvertising " caused a stir in the mid-2000s , when many dot.com companies experimented with it...
-```
-
-## Text Corpus
-
-Normally we call a collection of documents a *text corpus*, which contains a large and structured set of texts.
-For example, for the English language there are the [Corpus of Contemporary American English](https://www.english-corpora.org/coca/), [Georgetown University Multilayer Corpus](https://corpling.uis.georgetown.edu/gum), etc.
-Our news collection is also one such example.
-To perform NLP tasks such as topic modelling, the first and perhaps the most important thing is to represent a text corpus as format that the models can process, instead of directly using natural language.
-
-For the task of topic modelling, we perform the tokenisation on the input English text.
-The target is to represent each word as an integer index so that we can further process the numbers instead of words.
-This is called the *tokenisation* of the text.
-Of course we also need to have a mapping function that from index to word.
-
-### Step-by-step Operation
-
-The NLP module in Owl supports building a proper text corpus from given text dataset.
-In this section we will show how we can build a corpus from a collection of documents, in a step by step way.
-
-In the first step, remove the special characters. We define a regular expression `regexp_split` for special characters such as `,`, `?`, `\t` etc.
-First remove them, and then convert all the text into lower-case.
-The code below defines such a process function, and the `Nlp.Corpus.preprocess` apply it to all the text. Note this function will not change the number of lines in a corpus.
-
-```ocaml
-let simple_process s =
- Str.split Owl_nlp_utils.regexp_split s
- |> List.filter (fun x -> String.length x > 1)
- |> String.concat " "
- |> String.lowercase_ascii
- |> Bytes.of_string
-
-let preprocess input_file =
- let output_file = input_file ^ ".output" in
- Nlp.Corpus.preprocess simple_process input_file output_file
-```
-
-Based on the processed text corpus, we can build the *vocabulary*.
-Each word is assigned a number id, or index, and we have the dictionary to map word to index, and index to word.
-This is achieved by using the `Nlp.Vocabulary.build` function.
-
-```ocaml
-let build_vocabulary input_file =
- let vocab = Nlp.Vocabulary.build input_file in
- let output_file = input_file ^ ".vocab" in
- Nlp.Vocabulary.save vocab output_file
-```
-
-The `build` function returns a vocabulary. It contains three hash tables.
-The first maps a word to an index, and the second index to word.
-The last hash table is a map between index and its frequency, i.e. number of occurrence in the whole text body.
-We can check out the words of highest frequency with:
-
-```ocaml
-let print_freq vocab =
- Nlp.Vocabulary.top vocab 10 |>
- Owl.Utils.Array.to_string ~sep:", " fst
-```
-
-Unsurprisingly, the "the"'s and "a"'s are most frequently used:
-
-```text
-- : string =
-"the, to, of, a, and, in, \", s, that, on"
-```
-
-Changing `Nlp.Vocabulary.top` to `Nlp.Vocabulary.bottom` can show the words of lowest frequency:
-
-```text
-"eichorst, gcs, freeross, depoliticisation, humping, shopable, appurify, intersperse, vyaecheslav, raphaelle"
-```
-
-However, in a topic modelling task, we don't want these too frequent but meaningless words and perhaps also the least frequent words that are not about the topic of this document.
-Now let's trim off some most and least frequency words. You can trim either by absolute number or by percent. We use percent here, namely trimming off top and bottom 1% of the words.
-
-```ocaml
-let trim_vocabulary vocab =
- Nlp.Vocabulary.trim_percent ~lo:0.01 ~hi:0.01 vocab
-```
-
-With a proper vocabulary at hands, now we are ready to tokenise a piece of text.
-
-```ocaml
-let tokenise vocab text =
- String.split_on_char ' ' text |>
- List.map (Nlp.Vocabulary.word2index vocab)
-```
-
-For example, if we tokenise "this is owl book", you will get the following output.
-
-```text
-tokenise vocab "this is an owl book";;
-- : int list = [55756; 18322; 109456; 90661; 22362]
-```
-
-Furthermore, we can now tokenise the whole news collection.
-
-```ocaml
-let tokenise_all vocab input_file =
- let doc_s = Owl_utils.Stack.make () in
- Owl_io.iteri_lines_of_file
- (fun i s ->
- let t =
- Str.split Owl_nlp_utils.regexp_split s
- |> List.filter (Owl_nlp_vocabulary.exits_w vocab)
- |> List.map (Owl_nlp_vocabulary.word2index vocab)
- |> Array.of_list
- in
- Owl_utils.Stack.push doc_s i)
- input_file;
- doc_s
-```
-```mdx-error
-Line 5, characters 13-14:
-Warning 26 [unused-var]: unused variable t.
-```
-
-The process is simple: in the text corpus each line is a document and we iterate through the text line by line.
-For each line/document, we remove the special characters, filter out the words that exist in the vocabulary, and map each word to an integer index accordingly.
-Even though this is a simplified case, it well illustrates the typical starting point of text analysis before delving into any topic modelling.
-
-### Use the Corpus Module
-
-But we don't have to build a text corpus step by step. We provide the `NLP.Corpus` module for convenience.
-By using the `Nlp.Corpus.build` we perform both tasks we have introduced: building vocabulary, and tokenising the text corpus.
-With this function we can also specify how to trim off the high-frequency and low-frequency words.
-Here is an example:
-
-```ocaml
-let main () =
- let ids = Nlp.Corpus.unique "news.txt" "clean.txt" in
- Printf.printf "removed %i duplicates." (Array.length ids);
- let corpus = Nlp.Corpus.build ~lo:0.01 ~hi:0.01 "clean.txt" in
- Nlp.Corpus.print corpus
-```
-
-The `Nlp.Corpus.unique` function is just one more layer of pre-processing. It removes the possible duplicated lines/documents.
-The output prints out the processing progress, and then a summary of the corpus is printed out.
-
-```text
-2020-01-28 19:07:05.461 INFO : build up vocabulary ...
-2020-01-28 19:07:10.461 INFO : processed 13587, avg. 2717 docs/s
-2020-01-28 19:07:15.463 INFO : processed 26447, avg. 2644 docs/s
-...
-2020-01-28 19:08:09.125 INFO : convert to binary and tokenise ...
-2020-01-28 19:08:34.130 INFO : processed 52628, avg. 2104 docs/s
-2020-01-28 19:08:39.132 INFO : processed 55727, avg. 1857 docs/s
-...
-corpus info
- file path : news.txt
- # of docs : 129968
- doc minlen : 10
-- : unit = ()
-```
-
-The corpus contains three parts: the vocabulary, token, and text string.
-By calling the `build` function, we also save them for later use.
-It creates several files in the current directory.
-First, there is the vocabulary file `news.txt.voc` and `news.txt.voc.txt`. They are the same; only that the latter is in a human-readable format that has each line a word and the corresponding index number.
-We can get the vocabulary with `Corpus.get_vocab`.
-
-The tokenised text corpus is marshalled to the `news.txt.tok` file, and the string format content is saved as binary file to `news.txt.bin`.
-We choose to save the content as binary format to save file size.
-To get the i-th document, we can use `Corpus.get corpus i` to get the text string, or `Corpus.get_tok corpus i` to get an integer array that is tokenised version of this document.
-
-To access different documents efficiently by the document index (line number), we keep track of the accumulated length of text corpus and token array after processing each document. These two types of indexes are saved in the `news.txt.mdl` file.
-This file also contains the document id. We have seen the `minlen` value in the output of corpus information.
-Each document with less than 10 words will not be included in the corpus.
-The document id is an int array that shows the index (line number) of each document in the original text corpus so that it can be traced back.
-The document id can be retrieved by `Corpus.get_docid corpus`
-
-
-In the `Corpus` module, we provide three mechanisms to iterate through the text corpus: `next`, `iteri`, `mapi`.
-The `next` function is a generator that yields the next line of text document string in the text corpus until it hits the end of file.
-The `iteri` and `mapi` functions work exactly like in the normal Array module.
-The first function iterates all the documents one by one in the corpus, and the second maps all the documents in a corpus into another array.
-The `iteri_tok` and `mapi_tok` work the same, except that the function should work on integer array instead of string.
-Their signatures is shown below:
-
-```text
-val iteri : (int -> string -> unit) -> t -> unit
-
-val iteri_tok : (int -> int array -> unit) -> t -> unit
-
-val mapi : (int -> string -> 'a) -> t -> 'a array
-
-val mapi_tok : (int -> 'a -> 'b) -> t -> 'b array
-```
-
-The `Corpus` module is designed to support a large number of text corpus. With this tool in hand, we can further proceed with the discussion of topic modelling.
-
-## Vector Space Models
-
-Based on the tokenised text corpus, the next thing we need is a mathematical model to express abstract ideas such as "this sentence makes sense and that one does not", "these two documents are similar", or "the key word in that paragraph is such and such".
-To perform NLP tasks such as text retrieval and topic modelling, we use the *Vector Space Model* (VSM) to do that.
-
-According to the Wikipedia, a VSM is "an algebraic model for representing text documents (and any objects, in general) as vectors of identifiers".
-It may sound tricky but the basic idea is actually very simple.
-For example, let's assume we only care about three topics in any news: covid19, economics, and election.
-Then we can represent any news article with a three-element vector, each representing the weight of this topic in it.
-For the BBC news ["Coronavirus: Millions more to be eligible for testing"](https://www.bbc.co.uk/news/uk-52462928), we can represent it with vector `(100, 2.5, 0)`.
-The specific value does not actually matter here. The point is that now instead of a large chunk of text corpus, we only need to deal with this vector for further processing.
-
-The vector space model proposes a framework that maps a document to a vector $d = (x_1, x_1, \ldots, x_N)$. This N-dimensional vector space is defined by $N$ basic terms.
-Under this framework, we mainly have to decide on three factors.
-The first is to choose the meaning of each dimension, or the $N$ basic concepts in the vector space.
-The second is to specify the weight of each dimension for a document. In our simple example, why do we assign the first weight to `100` instead of `50`? There should be rules about it.
-That means we need a proper mapping function $f$ defined.
-Finally, after learning the vector representation, we can we can cluster or search the documents based on their *similarity*.
-Some common metrics of similarity are Euclidean distance and cosine similarity. We will talk about it later.
-
-In this chapter we focus on mapping a document to a vector space. However, VSM is not limited to only documents.
-We can also map a word into a vector that represents a point in a certain vector space. This vector is also called *word embedding*.
-In a proper representation, the similar words should be cluster together, and can even be used for calculation such as:
-
-$$V_\textrm{king} - V_\textrm{man} + V_\textrm{women} \approx V_\textrm{queen}.$$
-
-One of the most widely used methods for word embedding is the `word2vec` proposed in [@mikolov2013exploiting]. It includes different algorithms such as the skip-gram for computing the vector representation of words.
-For general purpose use, Google has already published a [pre-trained](https://code.google.com/archive/p/word2vec/) word2vec-based word embedding vector set based on part of the GoogleNews dataset.
-This vector set contains 300-dimensional vectors for 3 million words and phrases.
-
-Now, let's return to the theme of mapping documents to vector space. In the next chapter, we will start with a simple method that instantiate the VSM: the Bag of Words.
-
-## Bag of Words (BOW)
-
-The Bag of Words is a simple way to map docs into a vector space.
-This space uses all the vocabulary as the dimensions.
-Suppose there are totally $N$ different words in the vocabulary, then the vector space is of $N$ dimension.
-The mapping function is simply counting how many times each word in the vocabulary appears in a document.
-
-For example, let's use the five words "news", "about", "coronavirus", "test", and "cases" as the five dimensions in the vector space.
-Then if a document is `"...we heard news a new coronavirus vaccine is being developed which is expected to be tested about September..."` will be represented as `[1, 1, 1, 1, 0]` and the document `"...number of positive coronavirus cases is 100 and cumulative cases are 1000..."` will be projected to vector `[0, 0, 1, 0, 2]`.
-
-This Bag of Words method is easy to implement based on the text corpus.
-We first define a function that count the term occurrence in a document and return a hash table:
-
-```ocaml env=nlp:bow01
-let term_count htbl doc =
- Array.iter
- (fun w ->
- match Hashtbl.mem htbl w with
- | true ->
- let a = Hashtbl.find htbl w in
- Hashtbl.replace htbl w (a +. 1.)
- | false -> Hashtbl.add htbl w 1.)
- doc
-```
-
-The hash table contains all the counts of words in this document. Of course, we can also represent the returned results as an array of integers, though the array would likely be sparse.
-Then we can apply this function to all the documents in the corpus using the map function:
-
-```ocaml env=nlp:bow01
-let build_bow corpus =
- Nlp.Corpus.mapi_tok
- (fun i doc ->
- let htbl = Hashtbl.create 128 in
- term_count htbl doc;
- htbl)
- corpus
-```
-
-Based on this bag of words, the similarity between two vectors can be measured using different methods, e.g. with a simple dot product.
-
-This method is easy to implement and the computation is inexpensive.
-It may be simple, but for some tasks, especially those that have no strict requirement for context or position of words, this method proves to work well.
-For example, to cluster spam email, we only need to specify proper keywords as dimensions, such as "income", "bonus", "extra", "cash", "free", "refund", "promise" etc.
-We can expect that the spam email texts will be clustered closely and easy to recognise in this vector space using the bag of words.
-
-Actually, one even simpler method is called Boolean model. Instead of term frequency (count of word), the table only contains 1 or 0 to indicate if a word is present in a document.
-This approach might also benefit from its simplicity and proved to be useful in certain tasks, but it loses the information about the importance of the word. One can easily construct a document that is close to everyone else, by putting all the vocabulary together.
-The bag of word method fixes this problem.
-
-On the other hand, this simple approach does have its own problems.
-Back to the previous example, if we want to get how close a document is to `"news about coronavirus test cases"`, then the doc `"...number of positive coronavirus cases is 100 and cumulative cases are 1000..."` is scored the same as `"hey, I got some good news about your math test result..."`.
-This is not what we expected.
-Intuitively, words like "coronavirus" should matter more than the more normal words like "test" and "about".
-That's why we are going to introduce an improved method in the next section.
-
-## Term Frequency–Inverse Document Frequency (TF-IDF)
-
-In this previous section, we use the count of each term in representing document as vector.
-It is a way to represent the frequency the term in the document, and we can call it *term frequency*.
-In the previous section we have seen the intuition that the meaning of different word should be different.
-This cannot be fixed by simply using term count.
-In this section we introduce the idea of *Inverse Document Frequency* (IDF) to address this problem.
-
-The basic idea is simple.
-The IDF is used to represent how common a word is across all the documents. You can imagine that if a word is used throughout all the documents, then it must be of less importance in determining a feature of a document.
-On the other hand, if a word exists in only 1-2 documents, and where it exists, this word must be of crucial importance to determine its topic.
-Therefore, the IDF factor can be multiplied with the term frequency to present a more accurate metric for representing a document as vector.
-This approach is called TF-IDF.
-
-Actually, the two parts TF and IDF just provide frameworks for different computation methods.
-To compute the term frequency, we can use the count of words $c$, or the percentage of word in the current document $\frac{c}{N}$ where $N$ is the total number of words in the document.
-Another computation method is logarithm normalisation which use $\textrm{log}(c + 1)$.
-We can even use the boolean count that take the frequency of word that exists to be 1 that the ones that are not to be 0.
-These methods are all defined in the `Owl_nlp.Tfidf` module.
-
-```ocaml
-type tf_typ =
- | Binary
- | Count
- | Frequency
- | Log_norm
-```
-
-The same goes for the IDF. To measure how common a word $w$ is across all the document, a common way to compute is to do: $log(\frac{N_D}{n_w})$, where $N_D$ is the total number of documents and $n_w$ is the number of documents with term $w$ in it.
-This metric is within the range of $[0, \infty)$. It increases with larger total document number or smaller number of documents that contain a specific word.
-An improved version is called `Idf_Smooth`. It is calculated as $log(\frac{N_D}{n_w + 1})$.
-This method avoid the $n_w$ to be zero to cause divide error, and also avoid getting a `0` for a word just because it is used across all the documents.
-In Owl they are included in the type `df_typ`.
-Here the `Unary` method implies not using IDF, only term frequency.
-
-```ocaml
-type df_typ =
- | Unary
- | Idf
- | Idf_Smooth
-```
-
-In Owl we have the `Owl_nlp.Tfidf` module to perform the TF-IDF method.
-The corpus we have built in the previous section is used as input to it.
-Specifically, we use the `Nlp.Tfidf.build` function to build the TFIDF model:
-
-```ocaml
-let build_tfidf corpus =
- let tf = Nlp.Tfidf.Count in
- let df = Nlp.Tfidf.Idf in
- let model = Nlp.Tfidf.build ~tf ~df corpus in
- Nlp.Tfidf.save model "news.tfidf";
- model
-```
-
-In this code, we configure to use the bag-of-words style word count method to calculate term frequency, and use the normal logarithm method to compute inverse document frequency.
-The model can be saved for later use.
-After the model is build, we can search similar documents according to a given string.
-As a random example, let's just use the first sentence in our first piece of news in the dataset as search target: `"a brazilian man who earns a living by selling space for tattoo adverts on his body is now looking for a customer for his forehead"`.
-
-```ocaml
-let query model doc k =
- let typ = Owl_nlp_similarity.Cosine in
- let vec = Nlp.Tfidf.apply model doc in
- let knn = Nlp.Tfidf.nearest ~typ model vec k in
- knn
-```
-
-Recall the three ingredients in vector space model: choosing dimension topic words, mapping document to vector, and the measurement of similarity.
-Here we use the *cosine similarity* as a way to measure how aligned two vectors $A$ and $B$ are.
-We will talk about the similarity measurement in detail later.
-
-
-Next, the `vec` returned by the `apply` functions return an array of `(int * float)` tuples. For each item, the integer is the tokenised index of a word in the input document `doc`, and the float number is the corresponding TF-IDF value, based on the `model` we get from previous step.
-Finally, the `nearest` function searches all the documents and finds the vectors that have the largest similarity with the target document.
-Let's show the top-10 result by setting `k` to 10:
-
-```text
-val knn : (int * float) array =
- [|(11473, -783.546068863270875); (87636, -669.76533603535529);
- (121966, -633.92555577720907); (57239, -554.838541799660675);
- (15810, -550.95468134048258); (15817, -550.775276912183131);
- (15815, -550.775276912183131); (83282, -547.322385552312426);
- (44647, -526.074567425088844); (0, -496.924176137374445)|]
-```
-
-The returned result shows the id of the matched documents. We can retrieve each document by running e.g. `Owl_nlp.Corpus.get corpus 11473`.
-To save you some effort to do that, here we list link to some of the original news that are matched to be similar to the target document:
-
-1. *Every tatto tells a story*, doc id: 11473. [[Link](https://www.bbc.co.uk/news/magazine-27831231)]
-1. *The Complete Guide to Using Social Media for Customer Service*, doc id: 87636. [[Link](https://buffer.com/resources/social-media-for-customer-service-guide)]
-1. *Murder ink? Tattoos can be tricky as evidence*, doc id: 57239. [[Link](https://www.gazettenet.com/Archives/2014/06/tattoos-hg-060514)]
-1. *Scottish independence: Cinemas pull referendum adverts*, doc id: 15810. [[Link](https://www.bbc.co.uk/news/uk-scotland-scotland-politics-27602601)]
-1. *The profusion of temporarily Brazilian-themed products*, doc id:44647.
-[[Link](https://www.bbc.co.uk/news/magazine-27879430)]
-
-If you are interested, the input document comes from [this](https://www.bbc.co.uk/news/blogs-news-from-elsewhere-27051009) BBC news: *Brazil: Man 'earns a living' from tattoo ads*.
-Then you can see that, the searched result is actually quite related to the input document, especially the first one, which is exactly the same story written in another piece of news.
-The second result is somewhat distant. The word "customer" is heavily used in this document, and we can guess that it is also not frequently seen throughout the text corpus.
-The fourth news is not about the tattoo guy, but this news features the topic of "customer" and "adverts".
-The fifth news is chosen apparently because of the non-frequent word "brazilian" carries a lot of weight in TF-IDF.
-The interesting thing is that the same document, the first document, is ranked only 10th closest.
-Note that we just simply take a random sentence without any pre-processing or keyword design; also we use the un-trimmed version of text corpus.
-Even so, we can still achieve a somewhat satisfactory matching result, and the result fits nicely with the working mechanisms of the TF-IDF method.
-
-
-## Latent Dirichlet Allocation (LDA)
-
-In the previous section, we have seen that by specifying a document and using it as a query, we can find out the similar documents as the query.
-The query document itself is actually seen as a collection of words. However, the real world text, article or news, are rarely as simple as collections of words.
-More often than not, an article contains one or more *topics*. For example, it can involve the responsibility of government, the protection of environment, and a recent protest in the city, etc.
-Moreover, each of these topics can hardly be totally covered by just one single word.
-To this end we introduce the problem *topic modelling*: instead of proposing a search query to find similar content in text corpus, we hope to automatically cluster the documents according to several topics, and each topic is represented by several words.
-
-One of such method to do topic modelling is called *Latent Dirichlet Allocation* (LDA).
-The trained model of LDA contains two matrices.
-The first is called the "document-topic", which contains the number of tokens assigned to each topic in each doc. What do these topics look like then? This concerns the other trained matrix in the model: the "word-topic table". It contains the number of tokens assigned to each topic for each word.
-We will see how they work in a latter example.
-But first, some background theory.
-
-### Models
-
-Let's take a look at the model of LDA that is proposed in [@blei2003latent]. That is to say, how the LDA thinks about the way a document is composed.
-The model is expressed in [@fig:nlp:lda].
-
-{width=60% #fig:nlp:lda}
-
-This model uses the [plate notation](https://en.wikipedia.org/wiki/Plate_notation), the notation for describing probabilistic graphical models, to capture the dependencies among variables.
-In [@tbl:nlp:lda] we list the definition of the math notations used here and latter in this section.
-
-| Variable | Meaning |
-| :-----: | :------------------------- |
-| $K$ | number of topics |
-| $D$ | number of documents in text corpus |
-| $V$ | number of words in the vocabulary |
-| $N$ | total number or words in all document |
-| $\alpha$ | vector of length $K$, prior weight of the $K$ topics in a document |
-| $\beta$ | vector of length $V$, prior weight of the $V$ words in a topic |
-| $\Theta$ | vector of length $K$, distribution of topics in a document |
-| $\phi$ | vector of length $V$, distribution of words in a topic |
-| $Z$ | matrix of shape $D\times~V$, topic assignment of all words in all documents |
-| $W$ | matrix of shape $D\times~V$, token of words in all documents |
-| $n_{d,k}$ | how many times the document $d$ uses topic $k$ in the document-topic table
-| $m_{k,w}$ | the number of times topic $k$ uses word $w$ in the topic-word table
-: Variable notations in the LDA model {#tbl:nlp:lda}
-
-In this model, to infer the topics in a corpus, we imagine a **generative process** to create a document.
-The core idea here is that each document can be described by the distribution of topics, and each topic can be described by distribution of words.
-This makes sense, since we don't need the text in order to find the topics in an article.
-The process is as follows:
-
-1. Initialise the distribution of topics $\theta_d \sim \textrm{Dirichlet}(\alpha)$ in document $d$. $\textrm{Dirichlet}(\alpha)$ is a Dirichlet distribution parameterised by $\alpha$. We will talk about it in detail later.
-1. Initialise the distribution of words $\phi_k \sim \textrm{Dirichlet}(\beta)$ for topic $k$.
-1. Iterate each document $d$ and each word position $w$, and then perform the steps below:
- * first, picks one of these topics randomly (one of the elements in $Z$). Specifically, the choice of topic is actually taken according to a [categorical distribution](https://en.wikipedia.org/wiki/Categorical_distribution), parameterised by $\theta$. Formally, this step is represented as $Z_{d,w} \sim \textrm{Categorical}(\theta_d)$;
- * second, according to the words this topic contains, we pick a word randomly according to $\phi$. The picking process also follows categorical distribution: $W_{d,w} \sim \textrm{Categorical}(\phi_{Z_{d,w}})$.
-
-After finishing this generative process, we now have a "fake" document.
-The total probability of the model is:
-
-$$P(W, Z, \theta, \phi; \alpha, \beta) = \prod_{i=1}^K~P(\phi_i; \beta)~\prod_{j=1}^D~P(\theta_j; \alpha)~\prod_{t=1}^N~P(Z_{j,t}| \theta_j)~P(W_{j,t}| \phi_{Z_{j,t}}).$$ {#eq:nlp:lda0}
-
-The [@eq:nlp:lda0] corresponds to the above process and model in [@fig:nlp:lda] step by step.
-It is a multiplication of three parts: the probability of $\theta$ across all the documents, the probability of $\phi$ across all the topics, and that of the generated words across all documents.
-The LDA hopes to make this generated document to be close to a real document as much as possible.
-In another word, when we are looking at real document, LDA tries to maximise the possibility [@eq:nlp:lda0] that this document can be generated from a set of topics.
-
-### Dirichlet Distribution
-
-There is something we need to add to the generative process in the previous section.
-How $theta$ and $phi$ are generated?
-Randomly? No, that would not be a proper way.
-Think about what would happen if we randomly initialise the document-topic table: each document will be equally likely to contain any topic.
-But that's rarely the case. An article cannot talk about all the topics at the same time.
-What we really hope however, is that a single document belongs to a single topic, which is a more real-world scenario. The same goes for the word-topic table.
-
-To that end, LDA uses the [Dirichlet Distribution](https://en.wikipedia.org/wiki/Dirichlet_distribution) to perform this task.
-It is a family of continuous multivariate probability distribution parameterised by a vector $\alpha$.
-For example, suppose we have only two topics in the whole world.
-The tuple `(0, 1)` means it's totally about one topic, and `(1,0)` means its totally about the other.
-We can run the `Stats.dirichlet_rvs` function to generate such a pair of float numbers.
-The results are shown in [@fig:nlp:dirichlet].
-Both figures have the same number of dots.
-It shows that with smaller $\alpha$ value, the distribution is pushed to the corners, where it is obviously about one topic or the other.
-A larger $\alpha$ value, however, makes the topic concentrate around the middle where it's a mixture of both topics.
-
-{width=100% #fig:nlp:dirichlet}
-
-Therefore, in the model in [@fig:nlp:lda], we have two parameters $\alpha$ and $\beta$ as prior weights to initialise $\Theta$ and $\phi$ respectively.
-We use reasonably small parameters to have skewed probability distributions where only a small set of topics or words have high probability.
-
-
-### Gibbs Sampling
-
-Next, we will briefly introduce how the training algorithm works to get the topics using LDA.
-The basic idea is that we go through the documents one by one. Each word is initially assigned a random topic from the Dirichlet distribution.
-After that, we iterate over all the documents again and again.
-In each iterate, we look at each word, and try to find a hopefully a bit more proper topic for this word.
-In this process, we assume that all the other topic assignments in the whole text corpus are correct except for the current word we are looking at.
-Then we move forward to the next word in this document.
-In one iteration, we process all the words in all the documents in the same way.
-After enough iteration, we can get a quite accurate assignment for each word.
-And then of course the topics of each document would be clear.
-
-We need to further explain some details in this general description.
-The most important question is, in the sampling of a document, how exactly do we update the topic assignment of a word?
-We use the *Gibbs Sampling* algorithm to approximate the distribution of $P(Z | W; \alpha, \beta)$.
-For this word, we expect to get a vector of length $k$ where $k$ is the number of topics. It represents a conditional probability distribution of a one word topic assignment conditioned on the rest of the model.
-Based on [@eq:nlp:lda0], it can be derived that, in this distribution vector, the k-th element is:
-
-$$p(Z_{d,n}=k | Z_{-d,n}, W, \alpha, \beta) = \frac{n_{d,k} + \alpha_k}{\sum_{i=1}^K~(n_{d,i} + \alpha_i)}~\frac{m_{k,w_{d.n}} + \beta_{w_{d,n}}}{\sum_i~m_{k, i} + \beta_i}.$$
-
-Here $w_{d,n}$ is the current word we are looking at.
-To perform the sampling, we assume that only the current topic assignment to $w_{d,n}$ is wrong, so we remove the current assignment from the model before this round of iteration begins.
-$Z$ is the topic assignment of all words in all documents, and $W$ is the text corpus.
-
-This computations is a multiplication of two parts.
-As shown in [@tbl:nlp:lda], in the first part, $n_{d,k}$ shows how many times the document $d$ uses topic $k$, and $\alpha_k$ is the prior weight of topic $k$ in document.
-Therefore, this item means the percentage of words that are also assigned the same topic in the whole document.
-To put it more simply, it shows how much this document likes topic $k$.
-The larger it is, the more likely we will assign the current word to topic $k$ again.
-Similarly, the second part is the percentage of words that are also assigned the same topic in the whole document.
-Therefore, this item indicates how does topic like the word $w$.
-Larger number means $w$ will be assigned to this topic $k$ again.
-
-Finally, we multiply these two items to get the final distribution of probability of the word $w_{d,n}$, in the form of a vector of length $K$.
-Then we can uniformly draw a topic from this vector.
-We iterate this sampling process again and again until the model is good enough.
-
-
-### Topic Modelling Example
-
-Owl contains the `Owl_nlp.Lda` module to perform LDA method.
-Let's first use an example to demonstrate how LDA works.
-
-```ocaml
-let build_lda corpus topics =
- let model = Nlp.Lda.init ~iter:1000 topics corpus in
- Nlp.Lda.(train SimpleLDA model);
- model
-```
-
-The input to LDA is still the text corpus we have built. We also need to specify how many topics we want the text corpus to be divided into. Let's say we set the number of topics to 8.
-The process is simple, we first initialise the model using the `init` function and then we can train the model.
-Let's take a look at the document-topic table in this model, as shown below.
-
-```text
-val dk : Arr.arr =
- C0 C1 C2 C3 C4 C5 C6 C7
-R0 13 13 4 7 11 12 14 16
-R1 35 196 15 42 31 23 122 4
-R2 7 9 3 1 3 163 2 4
-R3 10 22 23 140 18 11 17 143
-...
-```
-
-This matrix shows the distribution of topics in each document, represented by a row.
-Each column represents a topic.
-For example, you can see that the fifth column of in the third document (R2) is obviously larger than the others.
-It means that dominantly talks about only the topic 6.
-Similarly, in the fourth document, the topic 4 and topic 8 are of equal coverage.
-
-We can then check the topic-word table in this model:
-
-```text
-val wk : Arr.arr =
- C0 C1 C2 C3 C4 C5 C6 C7
-R0 1 0 0 0 0 0 0 0
-R1 0 0 0 1 0 0 0 0
-R2 0 0 0 0 3 0 0 0
-R3 0 0 0 0 0 0 0 3
-...
-```
-
-This is sparse matrix. Each row represents a word from the vocabulary. A topic in a column can thus be represented as the words that have the largest numbers in that column.
-For example, we can set that a topic be represented by 10 words. The translation from the word-topic table to text representation is straightforward:
-
-```ocaml
-let get_topics vocab wt =
- Mat.map_cols (fun col ->
- Mat.top col 10
- |> Array.map (fun ws ->
- Owl_nlp.Vocabulary.index2word vocab ws.(0))
- ) wt
-```
-
-As an example, we can take a look at the topics generated by the "A Million News Headlines" [dataset](https://www.kaggle.com/therohk/million-headlines).
-
-
-```text
-Topic 1: police child calls day court says abuse dead change market
-Topic 2: council court coast murder gold government face says national police
-Topic 3: man charged police nsw sydney home road hit crash guilty
-Topic 4: says wa death sa abc australian report open sex final
-Topic 5: new qld election ban country future trial end industry hour
-Topic 6: interview australia world cup china south accused pm hill work
-Topic 7: police health govt hospital plan boost car minister school house
-Topic 8: new water killed high attack public farmers funding police urged
-```
-
-Here each topic is represented by ten of its highest ranked words in the vocabulary, but you might "feel" a common theme by connecting these dots together, even though some words may stride away a bit far away from this theme.
-We cannot directly observe the topic, only documents and words. Therefore the topics are latent.
-The word-topic matrix shows that each word has different weight in the topic and the words in a topic are ranked according to the weight.
-Now that we know what each topic talks about, we can cluster the documents by their most prominent topic, or just discover what topics are covered in a document, with about how much percentage each.
-
-We have introduced the basic mechanism of LDA.
-There are many work that extend based on it, such as the SparseLDA in [@yao2009efficient], and LightLDA in [@yuan2015lightlda].
-They may differ in details but share similar basic theory.
-
-
-## Latent Semantic Analysis (LSA)
-
-Besides LDA, another common technique in performing topic modelling is the Latent Semantic Analysis (LSA).
-Its purpose is the same as LDA, which is to get two matrices: the document-topic table, and the word-topic table to show the probability distribution of topics in documents and words in topics.
-The difference is that, instead of using an iterative update approach, LSA explicitly builds the *document-word matrix* and then performs the singular value decomposition (SVD) on it to get the two aforementioned matrices.
-
-Assume the text corpus contains $n$ documents, and the vocabulary contains $m$ words, then the document-word matrix is of size $n\times~m$.
-We can use the simple word count as the element in this matrix. But as we have discussed in previous section, the count of words does not reflect the significance of a word, so a better way to fill in the document-word matrix is to use the TF-IDF approach for each word in a document.
-
-Apparently, this matrix would be quite sparse. Also its row vectors are in a very high dimension.
-There is surely redundant information here.
-For example, if two documents talk about the same topic(s), then the words they contain will largely overlap.
-To this end, the SVD is then used to reduce the dimension and redundancy in this matrix.
-
-We have seen the SVD in the linear algebra chapter. It is widely used for reducing the dimension of information, by rotating and scaling the coordinating system to find suitable dimensions.
-SVD decomposes a matrix $A$ into $A = USV^T$.
-In this specific context of semantic analysis, $A$ is the document-word composition.
-We can think of the $U$ as representing the relationship between document and the topics, and $V^T$ as the relationship between topics and words.
-
-The columns of $U$ and rows of $V^T$ are both orthonormal bases, and the diagonal matrix $S$ has eigenvalues along its diagonal, each representing the weight of a group of corresponding bases from $U$ and $V$.
-Therefore, we can throw away the bases with less weight, truncating only $K$ columns (rows) from each matrix.
-In that way, we can preserve a large part of the information from the original document-word table by choosing only a small number of topics.
-This process is shown in [@fig:nlp:svd].
-Once we have the document-topic table $U$ and the topic-word table $V$, using the model will be the same as in LDA example.
-
-{width=100% #fig:nlp:svd}
-
-Compared to LDA, this process is easy to understand and implement.
-However, SVD is computationally intensive and hard to iterate with new data.
-The result is decent, but as [this blog](https://www.kaggle.com/rcushen/topic-modelling-with-lsa-and-lda) shows, it may not be as good as LDA in separating out the topic categories.
-
-Application of topic modelling is wide. For example, it can be used for summarising the large corpus of text data, text categorisation, spam filter, the recommender system, or automatic tagging of articles, etc.
-It can even be used to effectively discover useful structure in large collection of biological data.
-
-## Search Relevant Documents
-
-Topic models are effective tools for clustering documents based on their similarity or relevance. We can further use this tool to query relevant document given an input one. In this section, we will go through some techniques on how to query models built using the previous topic modelling method.
-
-### Euclidean and Cosine Similarity
-
-In the previous sections, we see that the topic modelling techniques maps documents to a vector space of topics.
-We can use different metrics to compare the similarity between two vectors.
-Two of the commonly used are the *Euclidean* and *Cosine* distances.
-Suppose we have two vectors $A$ and $B$, both of length of $n$.
-Then the Euclidean distance between these two are:
-
-$$\sqrt{\sum_{i=1}^n~(a_i - b_i)^2}.$$ {#eq:nlp:euclidean}
-
-The cosine similarity between two vectors $A$ and $B$ is defined as:
-
-$$cos(\theta) = \frac{A.B}{\|A\|~\|B\|}.$$ {#eq:nlp:cosine}
-
-It is the dot product of two vectors divided by the product of the length of both vectors.
-
-{width=60% #fig:nlp:similarity}
-
-We have implemented both methods in the `Nlp.Similarity` module as similarity metrics for use in NLP.
-The relationship between the Euclidean distance and Cosine similarity can be expressed in [@fig:nlp:similarity].
-There are two points on this two dimensional space.
-The Euclidean measures the direct distance of these two points, while the cosine similarity is about the degree between these two vectors.
-Therefore, the cosine similarity is more suitable for cases where the magnitude of the vectors does not matter.
-For example, in topic modelling, we already have two vectors representing documents.
-If we multiply all the elements in one of them by a scalar 10, the Euclidean distance between these two would change greatly.
-However, since the probability distribution in the vector does not change, we don't expect the similarity between these two vectors to change.
-That's why in this case we would prefer to use the cosine similarity as a measurement.
-
-### Linear Searching
-
-Suppose we have $n$ documents, each represented by a vector of length $m$. They are then denoted with variable `corpus`, an array of arrays, each of which is a document.
-We provide a vector `doc` as the query to search for the top-$k$ similar documents to it.
-First, we need a function to calculate pairwise distance for the whole model, and returns result in the form of array of `(id, dist)`.
-Here `id` is the original index of the document.
-`dist` is the distance between a document in corpus and the query document.
-
-```ocaml env=nlp:linear-search
-let all_pairwise_distance typ corpus x =
- let dist_fun = Owl_nlp_similarity.distance typ in
- let l = Array.mapi (fun i y -> i, dist_fun x y) corpus in
- Array.sort (fun a b -> Stdlib.compare (snd a) (snd b)) l;
- l
-```
-
-The results are sorted according to the distance, whichever distance metric we use.
-Based on this routine we can find the $k$ most relevant document:
-
-```ocaml env=nlp:linear-search
-let query corpus doc k =
- let typ = Owl_nlp_similarity.Cosine in
- let l = all_pairwise_distance typ corpus doc in
- Array.sub l 0 k
-```
-
-Here we use the cosine similarity as measurement of distance between vectors.
-To improve the efficiency of computation, we can instead using matrix multiplication to implement the cosine similarity.
-Specifically, suppose we have the query document vector $A$, and the corpus of document vector as before, and this array of arrays has already been converted to a dense matrix $B$, where each row vector represents a document.
-Then we can compute the $AB^T$ to get the cosine similarity efficiently.
-Of course, according to [@eq:nlp:cosine], we also need to make sure that $A$ and each row $r$ in $B$ are normalised by its own L2-norm before computations, so that for any vector $v$ we can have $\|v\| = 1$.
-
-```ocaml
-let query corpus doc k =
- let vec = Mat.transpose doc in
- let l = Mat.(corpus *@ vec) in
- Mat.bottom l k
-```
-
-Compared to the previous direct element-by-element multiplication, the matrix dot multiplication is often implemented with highly optimised linear algebra library routines, such as in OpenBLAS.
-These methods utilise various techniques such as multi-processing and multi-threading so that the performance is much better than a direct pairwise computation according to definition.
-
-## Summary
-
-In this chapter, we focus on topic modelling, one important natural language processing task, and introduce the basic idea and how Owl support it.
-First, we introduce how to tokenise text corpus for further mathematical processing.
-Then we introduce the basic idea of the vector space, and two different ways: the Bag of words (BOW), and Term Frequency–Inverse Document Frequency (TF-IDF), to project a document into a vector space as single vector.
-The BOW is straightforward to understand and implement, and the TF-IDF consider the how special a word is across the whole text corpus, and therefore usually gives more accurate representation.
-
-Next, we present two different methods based on the vector representation to retrieve topics from the documents: the Latent Dirichlet Allocation (LDA), and Latent Semantic Analysis (LSA).
-The LSA relies on the singular value decomposition technique on a document-word matrix to do that, while LDA relies on a generative model to iteratively to get the topic model.
-Once we have the topic modelling, we can compare the similarity between documents, or search for similar documents in the text corpus using different measurement of vector distances.
-The cosine similarity is a common one in text analysis. The computation of search process can be optimised using matrix multiplication.
-
-
-## References
diff --git a/book/nlp/dune b/book/nlp/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/nlp/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/nlp/dune.inc b/book/nlp/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/nlp/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/nlp/prelude.ml b/book/nlp/prelude.ml
deleted file mode 100644
index 737f02d..0000000
--- a/book/nlp/prelude.ml
+++ /dev/null
@@ -1,9 +0,0 @@
-#require "owl-top";;
-
-open Owl
-open Bigarray
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/optimisation/dune b/book/optimisation/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/optimisation/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/optimisation/dune.inc b/book/optimisation/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/optimisation/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/optimisation/prelude.ml b/book/optimisation/prelude.ml
deleted file mode 100644
index 8c67752..0000000
--- a/book/optimisation/prelude.ml
+++ /dev/null
@@ -1,10 +0,0 @@
-#require "owl-top,owl-plplot";;
-
-open Owl
-open Bigarray
-open Owl_plplot
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/part1.html b/book/part1.html
deleted file mode 100644
index 5cf58ba..0000000
--- a/book/part1.html
+++ /dev/null
@@ -1,35 +0,0 @@
-
-
-
-
-
-
-
-
-
-
-
-
Language Concepts
-
-
Part I covers the basic language concepts you'll need to
- know when building OCaml programs. It opens up with a guided
- tour to give you a quick overview of the language using an
- interactive command-line interface. The subsequent chapters
- cover the material that is touched upon by the tour in much
- more detail, including detailed coverage of OCaml's approach to
- imperative programming.
-
-
The last few chapters introduce OCaml's powerful abstraction
- facilities. We start by using functors to build a library for
- programming with intervals, and then use first-class modules to
- build a type-safe plugin system. OCaml also supports
- object-oriented programming, and we close Part I with two
- chapters that cover the object system; the first showing how to
- use OCaml's objects directly, and the second showing how to use
- the class system to add more advanced features like
- inheritance. This description comes together in the design of a
- simple object-oriented graphics library.
-
-
-
diff --git a/book/part2.html b/book/part2.html
deleted file mode 100644
index 7852a39..0000000
--- a/book/part2.html
+++ /dev/null
@@ -1,42 +0,0 @@
-
-
-
-
-
-
-
-
-
-
-
-
Tools and Techniques
-
-
Part II builds on the basics by demonstrating more advanced
- tools and techniques that are useful for building real world
- programs. Here you'll learn about useful libraries for building
- practical applications, as well as design patterns that help
- combine different features of the language to good effect.
-
-
This part begins by introducing two of the most common
- datastructures used in OCaml: maps and hashtables. We then
- change gears and explain how to build expressive command-line
- interfaces, which is a good example of a sophisticated use of
- the type system to create a user friendly library.
-
-
Some of the examples in this part use the JSON interchange
- format, and so we first show how to use third-party tools to
- parse and generate JSON, as well as how to build a parser from
- scratch. Another interchange format used throughout OCaml are
- s-expressions, and this chapter shows how to turn any OCaml
- value into an s-expression by using the powerful camlp4 syntax
- preprocessor.
-
-
We close with a tour of the Async communications library,
- which lets you build scalable, high-performance networked
- applications in OCaml. By the end of the chapter, you will be
- able to run web queries against the DuckDuckGo engine by using
- Async, JSON and a HTTP library all written in OCaml.
-
-
-
diff --git a/book/prologue/README.md b/book/prologue/README.md
deleted file mode 100644
index ee818d5..0000000
--- a/book/prologue/README.md
+++ /dev/null
@@ -1,66 +0,0 @@
-# Prologue
-
-Owl is a software system for scientific and engineering computing. The library is (mostly) developed in the OCaml language. As a very unique functional programming language, OCaml offers us superb runtime efficiency, flexible module system, static type checking, intelligent garbage collector, and powerful type inference. Owl undoubtedly inherits these great features directly from OCaml. With Owl, you can write succinct type-safe numerical applications in a beautiful and battle-tested functional language without sacrificing performance, significantly speed up the development life-cycle, and reduce the cost from prototype to production use.
-
-
-
-## A Brief History
-
-Owl originated from a research project which studied the design of synchronous parallel machines for large-scale distributed computing in July 2016. I chose OCaml as the language for developing the system due to its expressiveness and superior runtime efficiency. Another obvious reason is I was working as a [PostDoc](http://www.cl.cam.ac.uk/~lw525/) in OCamlLabs.
-
-Even though OCaml is a very well designed language, the libraries for numerical computing in OCaml ecosystem were very limited and the tooling was fragmented at that time. In order to test various analytical applications, I had to write so many numerical functions myself, from very low level algebra and random number generators to the high level stuff like algorithmic differentiation and deep neural networks. These code snippets started accumulating and eventually grew much bigger than the distributed engine itself. Therefore I decided to take these functions out and wrapped them up as a standalone library -- Owl.
-
-Owl's architecture undertook at least a dozen of iterations in the beginning, and some of the architectural changes are quite drastic. I intentionally avoid looking into the architecture of SciPy, Julia, Matlab to minimise their influence on Owl's architecture, I really do not want *yet another xyz ...*. When the architecture became stabilised, I started implementing different numerical functions. That was a stressful but fulfilling year in 2017, I worked day and night and added over 6000 functions (over 150,000 LOC). After one-year intensive development, Owl was already capable of doing many complicated numerical tasks. e.g. see our [Google Inception V3 demo](http://demo.ocaml.xyz/) for image classification. I even held a tutorial in Oxford to demonstrate *Data Science in OCaml*.
-
-Despite the fact that OCaml is a niche language, Owl has been attracting more and more users. I really appreciate their patience with this young but ambitious software. The community has been always supportive and provided useful feedback in these years. I hope Owl can help people to study functional programming and solve real-world problems.
-
-
-
-## Reductionism vs. Holism
-
-If you are from Python world and familiar with its ecosystem for numerical computing, you may see Owl as a mixture of NumPy, SciPy, Pandas, and many other libraries. You may be curious about why I have packed so much stuff together. As you learn more and more about OCaml, I am almost certain you will start wondering why Owl's design seems against *minimalist*, a popular design principle adopted by many OCaml libraries.
-
-First of all, I must point out that having many functionalities included in one system does not necessarily indicate a monolithic design. Owl's functionalities are well defined in various modules, and each module is very self-contained and follows the minimalist design principle.
-
-Second, I would like to argue that these functionalities should be co-designed and implemented together. This is exactly what we have learnt in the past two decades struggling to build a modern numerical system. The current co-design choice avoids a lot of redundant code and duplicated efforts, and makes optimisation a lot easier. NumPy, SciPy, Pandas, and other software spent so many years in order to well define the boundary of their functionality. In the end, NumPy becomes data representation (i.e. N-dimensional array), SciPy builds high-level analytical functions atop of such representation, Pandas evolves into a combination of table manipulation and analytical functions, and PyTorch bridges these functions between heterogeneous devices. However, there is still a significant amount of overlap if you look deep into the implementation code.
-
-Back to the OCaml world, the co-design becomes even more important because of the language's strict static typing. Especially if every small numerical library wraps its data representation into abstract types, then they will not play together nicely when you try to build a large and complex application. This further indicates that by having a huge number of small libraries in the ecosystem will not effectively improve a programmers' productivity. Owl is supposed to address this issue with a consistent *holistic* design, with a strong focus on scientific computing.
-
-Different choice of design principle also reveals the difference between system programming and numerical programming. System programming is built atop of a wide range of complicated and heterogeneous hardware, it abstracts out the real-world complexity by providing a (relatively) small set of APIs (recall how many system calls in the Unix operating system). On the other hand, numerical computing is built atop of a small amount of abstract number types (e.g. real and complex), then derives a rich set of advanced numerical operations for various fields (recall how many APIs in a numerical library). As a result, [reductionism](https://en.wikipedia.org/wiki/Reductionism) is preferred in system programming whereas [holism](https://en.wikipedia.org/wiki/Holism) is preferred in numerical one.
-
-
-
-## Key Features
-
-Owl has implemented many advanced numerical functions atop of its solid implementation of n-dimensional arrays. Compared to other numerical libraries, Owl is very unique in many perspectives, e.g. algorithmic differentiation and distributed computing have been included as integral components in the core system to maximise developers' productivity. Owl is young but grows very fast, the current features include:
-
-* N-dimensional array (both dense and sparse)
-* Various number types: ``float32``, ``float64``, ``complex32``, ``complex64``, ``int16``, ``int32``, etc.
-* Linear algebra and full interface to CBLAS and LAPACKE
-* Algorithmic differentiation (or automatic differentiation)
-* Neural network module for deep learning applications
-* Dynamic computational graph
-* Parallel and Distributed computation engine
-* Advanced math and statistics functions (e.g., hypothesis tests, MCMC, etc.)
-* Zoo system for efficient scripting and code sharing
-* JavaScript and unikernel backends.
-* Integration with other frameworks such as TensorFlow and PyTorch.
-* GPU and other accelerator frameworks.
-
-The Owl system evolves very fast, and OCaml's numerical ecosystem is booming as well, therefore your feedback is important for me to adjust future direction and the focus. In case you find some important features are missing, you are welcome to submit an issue on the [Issue Tracker](https://github.com/ryanrhymes/owl/issues).
-
-
-
-## Contact Me
-
-If you want to discuss about the book, the code, or any other related topics, you can reach me in the following ways.
-
-* [Email Me](mailto:liang.wang@cl.cam.ac.uk)
-* [Slack Channel](https://join.slack.com/t/owl-dev-team/shared_invite/enQtMjQ3OTM1MDY4MDIwLTcxYTlkODhiNGI4YjVkN2FmMjhlZGZhYzhkMTFhZjY0OGI1NDY5M2Y2NmYzNjBhZmRhZGE0NTY1ZjA5MTk4MjI)
-* [Issue Tracker](https://github.com/ryanrhymes/owl/issues)
-
-**Student Project:** If you happen to be a student in the Computer Lab and want to do some challenging development and design, here are some [Part II Projects](http://www.cl.cam.ac.uk/research/srg/netos/stud-projs/studproj-17/#owl0).
-
-If you are interested in more researchy topics, I offer Part III Projects and please have a look at :doc:[Owl's Sub-Projects](../project/proposal) page and contact me directly via email.
-
-I am looking forward to hearing from you!
diff --git a/book/prologue/dune b/book/prologue/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/prologue/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/prologue/dune.inc b/book/prologue/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/prologue/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/prologue/prelude.ml b/book/prologue/prelude.ml
deleted file mode 100644
index 93693eb..0000000
--- a/book/prologue/prelude.ml
+++ /dev/null
@@ -1,8 +0,0 @@
-#require "owl-top";;
-
-open Owl
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/references.bib b/book/references.bib
deleted file mode 100644
index fe7f75c..0000000
--- a/book/references.bib
+++ /dev/null
@@ -1,445 +0,0 @@
-@misc{wang2017owl,
- title={Owl: A general-purpose numerical library in OCaml. CoRR abs/1707.09616 (2017)},
- author={Wang, Liang},
- year={2017}
-}
-
-@book{minsky2013real,
- title={Real World OCaml: Functional programming for the masses},
- author={Minsky, Yaron and Madhavapeddy, Anil and Hickey, Jason},
- year={2013},
- publisher={" O'Reilly Media, Inc."}
-}
-
-@book{phillips2003signals,
- title={Signals, systems, and transforms},
- author={Phillips, Charles L and Parr, John M and Riskin, Eve A},
- year={2003},
- publisher={Prentice Hall Upper Saddle River}
-}
-
-@book{tufte2001visual,
- title={The visual display of quantitative information},
- author={Tufte, Edward R},
- volume={2},
- year={2001},
- publisher={Graphics press Cheshire, CT}
-}
-
-@article{wang2017probabilistic,
- title={Probabilistic synchronous parallel},
- author={Wang, Liang and Catterall, Ben and Mortier, Richard},
- journal={arXiv preprint arXiv:1709.07772},
- year={2017}
-}
-
-@book{james2013introduction,
- title={An introduction to statistical learning},
- author={James, Gareth and Witten, Daniela and Hastie, Trevor and Tibshirani, Robert},
- volume={112},
- year={2013},
- publisher={Springer}
-}
-
-@book{moler2008numerical,
- title={Numerical Computing with MATLAB: Revised Reprint},
- author={Moler, Cleve B},
- volume={87},
- year={2008},
- publisher={Siam}
-}
-
-@article{smith1997scientist,
- title={The scientist and engineer's guide to digital signal processing},
- author={Smith, Steven W and others},
- year={1997},
- publisher={California Technical Pub. San Diego}
-}
-
-@article{dean2008mapreduce,
- title={MapReduce: simplified data processing on large clusters},
- author={Dean, Jeffrey and Ghemawat, Sanjay},
- journal={Communications of the ACM},
- volume={51},
- number={1},
- pages={107--113},
- year={2008},
- publisher={ACM New York, NY, USA}
-}
-
-@inproceedings{li2014scaling,
- title={Scaling distributed machine learning with the parameter server},
- author={Li, Mu and Andersen, David G and Park, Jun Woo and Smola, Alexander J and Ahmed, Amr and Josifovski, Vanja and Long, James and Shekita, Eugene J and Su, Bor-Yiing},
- booktitle={11th $\{$USENIX$\}$ Symposium on Operating Systems Design and Implementation ($\{$OSDI$\}$ 14)},
- pages={583--598},
- year={2014}
-}
-
-@INPROCEEDINGS{7840682,
- author={V. {Hyvönen} and T. {Pitkänen} and S. {Tasoulis} and E. {Jääsaari} and R. {Tuomainen} and L. {Wang} and J. {Corander} and T. {Roos}},
- booktitle={2016 IEEE International Conference on Big Data (Big Data)},
- title={Fast nearest neighbor search through sparse random projections and voting},
- year={2016},
- volume={},
- number={},
- pages={881-888},
- keywords={approximation theory;learning (artificial intelligence);matrix algebra;search problems;fast nearest neighbor search;sparse random projections;sparse random voting;index structures;approximate nearest neighbor queries;recommendation systems;multiple random projection trees;novel voting scheme;fast index construction;memory footprint;big matrix multiplications;Nearest neighbor searches;Approximation algorithms;Indexes;Partitioning algorithms;Electronic mail;Force;Memory management;Nearest Neighbor Search;Random Projections;High Dimensionality;Approximation Algorithms},
- doi={10.1109/BigData.2016.7840682},
- ISSN={null},
- month={Dec},
-}
-
-@ARTICLE{7462177,
- author={L. {Wang} and S. {Tasoulis} and T. {Roos} and J. {Kangasharju}},
- journal={IEEE Transactions on Big Data},
- title={Kvasir: Scalable Provision of Semantically Relevant Web Content on Big Data Framework},
- year={2016},
- volume={2},
- number={3},
- pages={219-233},
- keywords={Big Data;content-based retrieval;indexing;recommender systems;semantic Web;trees (mathematics);semantic relevant Web content;Big Data framework;information flows;content-based filtering;work efficiency;latent semantic analysis;information retrieval technique;large text corpora;semantic recommendation system;proactive content provision service;Web browsing;automated content provision service;Apache Spark;Internet service;Kvasir architectural design;classic randomized partition tree;document indexing;document searching;Big data;Semantics;Indexing;Scalability;Internet;Information retrieval;Sparks;Web application;information retrieval;semantic search;random projection;machine learning;Apache Spark},
- doi={10.1109/TBDATA.2016.2557348},
- ISSN={2372-2096},
- month={Sep.},
-}
-
-@book{boyd2004convex,
- title={Convex optimization},
- author={Boyd, Stephen and Vandenberghe, Lieven},
- year={2004},
- publisher={Cambridge university press}
-}
-
-@book{fletcher2013practical,
- title={Practical methods of optimization},
- author={Fletcher, Roger},
- year={2013},
- publisher={John Wiley \& Sons}
-}
-
-@book{press2007numerical,
- title={Numerical recipes 3rd edition: The art of scientific computing},
- author={Press, William H and Teukolsky, Saul A and Vetterling, William T and Flannery, Brian P},
- year={2007},
- publisher={Cambridge university press}
-}
-
-@article{cormode2005improved,
- title={An improved data stream summary: the count-min sketch and its applications},
- author={Cormode, Graham and Muthukrishnan, Shan},
- journal={Journal of Algorithms},
- volume={55},
- number={1},
- pages={58--75},
- year={2005},
- publisher={Academic Press}
-}
-
-@article{griewank1989automatic,
- title={On automatic differentiation},
- author={Griewank, Andreas and others},
- journal={Mathematical Programming: recent developments and applications},
- volume={6},
- number={6},
- pages={83--107},
- year={1989},
- publisher={Amsterdam}
-}
-
-@article{feynman1964feynman,
- title={Feynman lectures on physics. Volume 2: Mainly electromagnetism and matter},
- author={Feynman, Richard P},
- journal={Reading, Ma.: Addison-Wesley, 1964, edited by Feynman, Richard P.; Leighton, Robert B.; Sands, Matthew},
- year={1964}
-}
-
-@article{goto2008anatomy,
- title={Anatomy of high-performance matrix multiplication},
- author={Goto, Kazushige and Geijn, Robert A},
- journal={ACM Transactions on Mathematical Software (TOMS)},
- volume={34},
- number={3},
- pages={12},
- year={2008},
- publisher={ACM}
-}
-
-@inproceedings{siskind2005perturbation,
- booktitle = {17th International Workshop, IFL'05 (2005)},
- editor = {Jerey Mark Siskind and Barak A. Pearlmutter},
- title = {Perturbation Confusion and Referential Transparency:
-Correct Functional Implementation of Forward-Mode AD},
- author = {Jeffrey Mark Siskind and Barak A. Pearlmutter},
- publisher = {Springer},
- year = {2005},
- keywords = {Perturbation; Referential Transparency; Forward-Mode AD;},
- url = {http://mural.maynoothuniversity.ie/566/},
-}
-
-@book{strang2006linear,
- added-at = {2014-09-12T13:40:38.000+0200},
- address = {Belmont, CA},
- author = {Strang, Gilbert},
- biburl = {https://www.bibsonomy.org/bibtex/2928ae987a1afe04daac3c76587856389/alex_ruff},
- description = {Linear Algebra and Its Applications, 4th Edition: Gilbert Strang: 9780030105678: Amazon.com: Books},
- interhash = {89d8f10be9cdd770dd9639ac4d469e97},
- intrahash = {928ae987a1afe04daac3c76587856389},
- isbn = {0030105676 9780030105678 0534422004 9780534422004},
- keywords = {book math to_READ},
- publisher = {Thomson, Brooks/Cole},
- refid = {61231077},
- timestamp = {2014-09-12T13:40:38.000+0200},
- title = {Linear algebra and its applications},
- url = {http://www.amazon.com/Linear-Algebra-Its-Applications-Edition/dp/0030105676},
- year = 2006
-}
-
-@article{lecun1998gradient,
- title={Gradient-based learning applied to document recognition},
- author={LeCun, Yann and Bottou, L{\'e}on and Bengio, Yoshua and Haffner, Patrick},
- journal={Proceedings of the IEEE},
- volume={86},
- number={11},
- pages={2278--2324},
- year={1998},
- publisher={Ieee}
-}
-
-@inproceedings{krizhevsky2012imagenet,
- title={Imagenet classification with deep convolutional neural networks},
- author={Krizhevsky, Alex and Sutskever, Ilya and Hinton, Geoffrey E},
- booktitle={Advances in neural information processing systems},
- pages={1097--1105},
- year={2012}
-}
-
-@article{simonyan2014very,
- title={Very deep convolutional networks for large-scale image recognition},
- author={Simonyan, Karen and Zisserman, Andrew},
- journal={arXiv preprint arXiv:1409.1556},
- year={2014}
-}
-
-@inproceedings{he2016deep,
- title={Deep residual learning for image recognition},
- author={He, Kaiming and Zhang, Xiangyu and Ren, Shaoqing and Sun, Jian},
- booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition},
- pages={770--778},
- year={2016}
-}
-
-@inproceedings{szegedy2015going,
- title={Going deeper with convolutions},
- author={Szegedy, Christian and Liu, Wei and Jia, Yangqing and Sermanet, Pierre and Reed, Scott and Anguelov, Dragomir and Erhan, Dumitru and Vanhoucke, Vincent and Rabinovich, Andrew},
- booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition},
- pages={1--9},
- year={2015}
-}
-
-@article{lin2013network,
- title={Network in network},
- author={Lin, Min and Chen, Qiang and Yan, Shuicheng},
- journal={arXiv preprint arXiv:1312.4400},
- year={2013}
-}
-
-@article{iandola2016squeezenet,
- title={SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and< 0.5 MB model size},
- author={Iandola, Forrest N and Han, Song and Moskewicz, Matthew W and Ashraf, Khalid and Dally, William J and Keutzer, Kurt},
- journal={arXiv preprint arXiv:1602.07360},
- year={2016}
-}
-
-@misc{zoo2019inceptionv3,
- author = {Zhao, Jianxin and Wang, Liang},
- title = {{InceptionV3 network architecture defined in Owl}},
- howpublished = "\url{https://gist.github.com/jzstark/9428a62a31dbea75511882ab8218076f/}",
- year = {2019},
- note = "[Online; accessed 14-Feb-2020]"
-}
-
-@misc{zoo2019vgg16,
- author = {Zhao, Jianxin and Wang, Liang},
- title = {{VGG16 network architecture defined in Owl}},
- howpublished = "\url{https://gist.github.com/jzstark/f5409c44d6444921a8ceec00e33c42c4/}",
- year = {2019},
- note = "[Online; accessed 14-Feb-2020]"
-}
-
-@misc{zoo2019resnet50,
- author = {Zhao, Jianxin and Wang, Liang},
- title = {{ResNet50 network architecture defined in Owl}},
- howpublished = "\url{https://gist.github.com/pvdhove/a05bf0dbe62361b9c2aff89d26d09ba1/}",
- year = {2019},
- note = "[Online; accessed 14-Feb-2020]"
-}
-
-@misc{zoo2019squeezenet,
- author = {Zhao, Jianxin and Wang, Liang},
- title = {{SqueezeNet network architecture defined in Owl}},
- howpublished = "\url{https://gist.github.com/jzstark/c424e1d1454d58cfb9b0284ba1925a48/}",
- year = {2019},
- note = "[Online; accessed 14-Feb-2020]"
-}
-
-@article{gatys2015neural,
- title={A neural algorithm of artistic style},
- author={Gatys, Leon A and Ecker, Alexander S and Bethge, Matthias},
- journal={arXiv preprint arXiv:1508.06576},
- year={2015}
-}
-
-
-@inproceedings{luan2017deep,
- title={Deep photo style transfer},
- author={Luan, Fujun and Paris, Sylvain and Shechtman, Eli and Bala, Kavita},
- booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
- pages={4990--4998},
- year={2017}
-}
-
-@inproceedings{isola2017image,
- title={Image-to-image translation with conditional adversarial networks},
- author={Isola, Phillip and Zhu, Jun-Yan and Zhou, Tinghui and Efros, Alexei A},
- booktitle={Proceedings of the IEEE conference on computer vision and pattern recognition},
- pages={1125--1134},
- year={2017}
-}
-
-@inproceedings{Johnson2016Perceptual,
- title={Perceptual losses for real-time style transfer and super-resolution},
- author={Johnson, Justin and Alahi, Alexandre and Fei-Fei, Li},
- booktitle={European Conference on Computer Vision},
- year={2016}
-}
-
-@inproceedings{ulyanov2016texture,
- title={Texture Networks: Feed-forward Synthesis of Textures and Stylized Images.},
- author={Ulyanov, Dmitry and Lebedev, Vadim and Vedaldi, Andrea and Lempitsky, Victor S},
- booktitle={ICML},
- volume={1},
- number={2},
- pages={4},
- year={2016}
-}
-
-@inproceedings{zhao2018data,
- title={Data analytics service composition and deployment on edge devices},
- author={Zhao, Jianxin and Tiplea, Tudor and Mortier, Richard and Crowcroft, Jon and Wang, Liang},
- booktitle={Proceedings of the 2018 Workshop on Big Data Analytics and Machine Learning for Data Communication Networks},
- pages={27--32},
- year={2018}
-}
-
-@article{dullemond1991introduction,
- title={Introduction to tensor calculus},
- author={Dullemond, Kees and Peeters, Kasper},
- journal={Kees Dullemond and Kasper Peeters},
- pages={42--44},
- year={1991}
-}
-
-@inproceedings{glorot2010understanding,
- title={Understanding the difficulty of training deep feedforward neural networks},
- author={Glorot, Xavier and Bengio, Yoshua},
- booktitle={Proceedings of the thirteenth international conference on artificial intelligence and statistics},
- pages={249--256},
- year={2010}
-}
-
-@article{mikolov2013exploiting,
- title={Exploiting similarities among languages for machine translation},
- author={Mikolov, Tomas and Le, Quoc V and Sutskever, Ilya},
- journal={arXiv preprint arXiv:1309.4168},
- year={2013}
-}
-
-
-@inproceedings{yao2009efficient,
- title={Efficient methods for topic model inference on streaming document collections},
- author={Yao, Limin and Mimno, David and McCallum, Andrew},
- booktitle={Proceedings of the 15th ACM SIGKDD international conference on Knowledge discovery and data mining},
- pages={937--946},
- year={2009}
-}
-
-@inproceedings{yuan2015lightlda,
- title={Lightlda: Big topic models on modest computer clusters},
- author={Yuan, Jinhui and Gao, Fei and Ho, Qirong and Dai, Wei and Wei, Jinliang and Zheng, Xun and Xing, Eric Po and Liu, Tie-Yan and Ma, Wei-Ying},
- booktitle={Proceedings of the 24th International Conference on World Wide Web},
- pages={1351--1361},
- year={2015}
-}
-
-@article{blei2003latent,
- title={Latent dirichlet allocation},
- author={Blei, David M and Ng, Andrew Y and Jordan, Michael I},
- journal={Journal of machine Learning research},
- volume={3},
- number={Jan},
- pages={993--1022},
- year={2003}
-}
-
-@inproceedings{dasgupta2013randomized,
- title={Randomized partition trees for exact nearest neighbor search},
- author={Dasgupta, Sanjoy and Sinha, Kaushik},
- booktitle={Conference on Learning Theory},
- pages={317--337},
- year={2013}
-}
-
-
-@article{candy1991symplectic,
- title={A symplectic integration algorithm for separable Hamiltonian functions},
- author={Candy, J and Rozmus, W},
- journal={Journal of Computational Physics},
- volume={92},
- number={1},
- pages={230--256},
- year={1991},
- publisher={Elsevier}
-}
-
-@book{friedman2001elements,
- title={The elements of statistical learning},
- author={Friedman, Jerome and Hastie, Trevor and Tibshirani, Robert},
- volume={1},
- number={10},
- year={2001},
- publisher={Springer series in statistics New York}
-}
-
-@inproceedings{he2017mask,
- title={Mask r-cnn},
- author={He, Kaiming and Gkioxari, Georgia and Doll{\'a}r, Piotr and Girshick, Ross},
- booktitle={Proceedings of the IEEE international conference on computer vision},
- pages={2961--2969},
- year={2017}
-}
-
-@inproceedings{ren2015faster,
- title={Faster r-cnn: Towards real-time object detection with region proposal networks},
- author={Ren, Shaoqing and He, Kaiming and Girshick, Ross and Sun, Jian},
- booktitle={Advances in neural information processing systems},
- pages={91--99},
- year={2015}
-}
-
-@inproceedings{girshick2015fast,
- title={Fast r-cnn},
- author={Girshick, Ross},
- booktitle={Proceedings of the IEEE international conference on computer vision},
- pages={1440--1448},
- year={2015}
-}
-
-@article{bayes1991essay,
- title={An essay towards solving a problem in the doctrine of chances. 1763.},
- author={Bayes, Thomas},
- journal={MD computing: computers in medical practice},
- volume={8},
- number={3},
- pages={157},
- year={1991}
-}
\ No newline at end of file
diff --git a/book/regression/dune b/book/regression/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/regression/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/regression/dune.inc b/book/regression/dune.inc
deleted file mode 100644
index 5d14aca..0000000
--- a/book/regression/dune.inc
+++ /dev/null
@@ -1,11 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- (:y0 ../../examples/code/linear-algebra/example_00.ml)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected)
- (diff? %{y0} %{y0}.corrected))))
diff --git a/book/regression/prelude.ml b/book/regression/prelude.ml
deleted file mode 100644
index 8c67752..0000000
--- a/book/regression/prelude.ml
+++ /dev/null
@@ -1,10 +0,0 @@
-#require "owl-top,owl-plplot";;
-
-open Owl
-open Bigarray
-open Owl_plplot
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/signal/dune b/book/signal/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/signal/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/signal/dune.inc b/book/signal/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/signal/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/signal/prelude.ml b/book/signal/prelude.ml
deleted file mode 100644
index 8c67752..0000000
--- a/book/signal/prelude.ml
+++ /dev/null
@@ -1,10 +0,0 @@
-#require "owl-top,owl-plplot";;
-
-open Owl
-open Bigarray
-open Owl_plplot
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/slicing/dune b/book/slicing/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/slicing/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/slicing/dune.inc b/book/slicing/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/slicing/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/slicing/prelude.ml b/book/slicing/prelude.ml
deleted file mode 100644
index 737f02d..0000000
--- a/book/slicing/prelude.ml
+++ /dev/null
@@ -1,9 +0,0 @@
-#require "owl-top";;
-
-open Owl
-open Bigarray
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/stats/dune b/book/stats/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/stats/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/stats/dune.inc b/book/stats/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/stats/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/stats/prelude.ml b/book/stats/prelude.ml
deleted file mode 100644
index 8c67752..0000000
--- a/book/stats/prelude.ml
+++ /dev/null
@@ -1,10 +0,0 @@
-#require "owl-top,owl-plplot";;
-
-open Owl
-open Bigarray
-open Owl_plplot
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/symbolic/README.md b/book/symbolic/README.md
deleted file mode 100644
index 700b130..0000000
--- a/book/symbolic/README.md
+++ /dev/null
@@ -1,611 +0,0 @@
-# Symbolic Representation
-
-
-## Introduction
-
-The development of `owl_symbolic` library is motivated by multiple factors.
-For one thing, scientific computation can be considered as consisting of two broad categories: numerical computation, and symbolic computation. Owl has achieved a solid foundation in the former, but as yet to support the latter one, which is heavily utilised in a lot of fields.
-For another, with the development of neural network compilers such as [TVM](https://tvm.apache.org/), it is a growing trend that the definition of computation can be separated out, and the low level compilers to deal with optimisation and code generation etc. to pursue best computation performance.
-Besides, tasks such as visualising a computation also require some form or intermediate representation (IR).
-Owl has already provided a computation graph layer to separate the definition and execution of computation to improve the performance, but it's not an IR layer to perform these different tasks as mentioned before.
-Towards this end, we begin to develop an intermediate symbolic representation of computations and facilitate various tasks based on this symbol representation.
-
-One thing to note is that do not mistake our symbolic representation as the classic symbolic computation (or Computer Algebra System) that manipulate mathematical expressions in a symbolic way, which is similar to the traditional manual computations.
-It is indeed one of our core motivations to pursue the symbolic computation with Owl.
-Currently we provide a symbolic representation layer as the first step towards that target.
-More discussion will be added in future versions with the development with the support of symbolic math in Owl.
-
-## Design
-
-`owl_symbolic` is divided into two parts: the core symbolic representation that constructs a symbolic graph, and various engines that perform different task based on the graph.
-The architecture design of this system is shown in [@fig:symbolic:architecture].
-
-{width=75% #fig:symbolic:architecture}
-
-The core abstraction is an independent symbolic representation layer.
-Based on this layer, we have various engines that can be translated to and from this symbolic representation.
-Currently we support three engines: the ONNX binary format, the computation graph in Owl, and the LaTeX string.
-The CAS engine is currently still an on-going research project, and we envision that, once finished, this engine can be used to pre-process a symbolic representation so that it as a simplified canonical form before being processed by other engines.
-
-
-### Core abstraction
-
-The core part is designed to be minimal and contains only necessary information.
-Currently it has already covered many common computation types, such as math operations, tensor manipulations, neural network specific operations such as convolution, pooling etc.
-Each symbol in the symbolic graph performs a certain operation.
-Input to a symbolic graph can be constants such as integer, float number, complex number, and tensor. The input can also be variables with certain shapes. An empty shape indicates a scalar value. The users can then provide values to the variable after the symbolic graph is constructed.
-
-**Symbol**
-
-The symbolic representation is defined mainly as array of `symbol`.
-Each `symbol` is a graph node that has an attribution of type ` Owl_symbolic_symbol.t`.
-It means that we can traverse through the whole graph by starting with one `symbol`.
-Besides symbols, the `name` field is the graph name, and `node_names` contains all the nodes' name contained in this graph.
-
-```ocaml
-type symbol = Owl_symbolic_symbol.t Owl_graph.node
-
-type t =
- { mutable sym_nodes : symbol array
- ; mutable name : string
- ; mutable node_names : string array
- }
-```
-
-Let's look at `Owl_symbolic_symbol.t`. It defines all the operations contained in the symbolic representation:
-
-```
-type t =
- | NOOP
- | Int of Int.t
- | Complex of Complex.t
- | Float of Float.t
- | Tensor of Tensor.t
- | Variable of Variable.t
- | RandomUniform of RandomUniform.t
- | Sin of Sin.t
- | Cos of Cos.t
- | Exp of Exp.t
- | ReduceSum of ReduceSum.t
- | Reshape of Reshape.t
- | Conv of Conv.t
- ....
-```
-
-There are totally about 150 operations included in our symbolic representation.
-Each operation is implemented as a module. These modules share common attributes such as name, input operation names, output shapes, and then each module contains zero or more attributes of itself.
-For example, the `Sin` operation module is implemented as:
-
-
-```
-module Sin = struct
- type t =
- { mutable name : string
- ; mutable input : string array
- ; mutable out_shape : int array option array
- }
-
- let op_type = "Sin"
-
- let create ?name x_name =
- let input = [| x_name |] in
- let name = Owl_symbolic_utils.node_name ?name op_type in
- { name; input; out_shape = [| None |] }
-end
-```
-
-The module provides properties such as `op_type` and functions such as `create` that returns object of type `Sin.t`.
-The `name`, `input` and `out_shape` are common attributes in the operation modules.
-
-In implementing the supported operations, we follow the category used in ONNX. These operations can be generally divided into different groups as shown below.
-
-- Generators: operations that generate data, taking no input. For example, the `Int`, `Float`, `Tensor`, `Variable`, etc.
-- Logical: logical operations such as `Xor`.
-- Math: mathematical operations. This group of operations makes a large part of the total operations supported.
-- Neural Network: neural network related operations such as convolution and pooling.
-- Object detection: also used in neural network, but the operations that are closely related with object detection applications, including `RoiAlign` and `NonMaxSuppression`.
-- Reduction: reduction (or folding) math operations such as sum reduce.
-- RNN: Recurrent neural network related operations such as LTSM.
-- Tensor: Normal tensor operations, like the ones that are included in the Ndarray module, such as `concat`, `reshape`, etc.
-- Sequence: take multiple tensors as one single object called `sequence`, and there are different corresponding functions on the sequence type data, such as `SequenceInsert`, `SequenceLength` etc.
-
-
-Based on these operation modules, we provide several functions on the `Owl_symbolic_symbol.t` type:
-
-- `name`: get the name of operation
-- `op_type`: get the operation type string
-- `input`: get the input nodes name of an operation
-- `set_input`: update the input nodes name
-- `output`: get the output nodes name
-- `set_output`: update the output nodes name
-
-There are also some functions that only apply to certain types of operations.
-The generator type of operations all need to specify the type of data it supports. Therefore, we use `dtype` function to check their data types.
-Another example is the `output` property. For most of the operation, it has only one output, and therefore its name is its output name.
-However, for operations such as `MaxPool` that contains multiple outputs, we need another function: `output`.
-
-**Type Checking**
-
-The type supported by `owl_symbolic` is listed as follows:
-```ocaml
-type number_type =
- | SNT_Noop
- | SNT_Float
- | SNT_Double
- | SNT_Complex32
- | SNT_Complex64
- | SNT_Bool
- | SNT_String
- | SNT_Int8
- | SNT_Int16
- | SNT_Int32
- | SNT_Int64
- | SNT_Uint8
- | SNT_Uint16
- | SNT_Uint32
- | SNT_Uint64
- | SNT_Float16
- | SNT_SEQ of number_type
-```
-This list of types covers most number and non-number types. `SNT_SEQ` means the type a list of the basic elements as inputs/outputs.
-
-**Operators**
-
-All these operations are invisible to users.
-What the users really use are the *operators*.
-To build a graph, we first need to build the required attributes into an operation, and then put it into a graph node. This is what an operator does.
-Take the `sin` operator as an example:
-
-```
-let sin ?name x =
- let xn = Owl_symbolic_graph.name x in
- let s = Owl_symbolic_ops_math.Sin.create ?name xn in
- make_node (Owl_symbolic_symbol.Sin s) [| x |]
-```
-
-Here the `sin` operator takes its parent node `x` as input, get its name as input property, and create a symbol node with the function `make_node`.
-This function takes an operation and an array of parent symbols, and then creates one symbol as return.
-What it does is mainly creating a child node using the given operation as node attribution, updating the child's input and output shape, and then connecting the child with parents before returning the child node.
-The connection is on both directions:
-
-```
-connect_ancestors parents [| child |];
-let uniq_parents = Owl_utils_array.unique parents in
-Array.iter (fun parent -> connect_descendants [| parent |] [| child |]) uniq_parents
-```
-
-Therefore, the users can use the operators to build a graph representation. Here is an example:
-
-```ocaml
-open Owl_symbolic
-open Op
-open Infix
-
-let x = variable "x_0"
-let y = exp ((sin x ** float 2.) + (cos x ** float 2.))
- + (float 10. * (x ** float 2.))
- + exp (pi () * complex 0. 1.)
-```
-
-Here we start with the `variable` operator, which creates a placeholder for incoming data later.
-You can specify the shape of the variable with `~shape` parameter. If not specified, then it defaults to a scalar.
-You can also choose to initialise this variable with a *tensor* so that even if you don't feed any data to the variable, the default tensor value will be used.
-A tensor in `owl-symbolic` is defined as:
-
-```ocaml
-type tensor =
- { mutable dtype : number_type
- ; mutable shape : int array
- ; mutable str_val : string array option
- ; mutable flt_val : float array option
- ; mutable int_val : int array option
- ; mutable raw_val : bytes option
- }
-```
-
-A tensor is of a specific type of data, and then it contains the value: string array, float array, integer array, or bytes.
-Only one of these fields can be used.
-If initialised with a tensor, a variable takes the same data type and shape as that of the tensor.
-
-**Naming**
-
-Currently we adopt a global naming scheme, which is to add an incremental index number after each node's type. For example, if we have an `Add` symbol, a `Div` symbol, and then another `Add` symbol in a graph, then each node will be named `add_0`, `div_1`, and `add_1`.
-One exception is the variable, where a user has to explicitly name when create a variable. Of course, users can also optionally any node in the graph, but the system will check to make sure the name of each node is unique.
-The symbolic graph contains the `node_names` field that includes all the nodes' names in the graph.
-
-**Shape Inferencing**
-
-One task the symbolic core needs to perform is shape checking and shape inferencing.
-Shape inference is performed in the `make_node` function and therefore happens every time a user uses an operation to construct a symbolic node and connect it with previous nodes. It is assumed that the parents of the current node are already known.
-
-```
-let (in_shapes : int array option array array)=
- Array.map (fun sym_node ->
- Owl_graph.attr sym_node |> Owl_symbolic_symbol.out_shape
- ) parents
- in
-let (shape : int array option array) =
- Owl_symbolic_shape.infer_shape in_shapes sym
-...
-```
-
-As the code shows, for each node, we first find the output shapes of its parents.
-The `in_shape` is of type `int array option array array`.
-You can understand it this way: `int array` is a shape array; `int array option` means this shape could be `None`.Then `int array option array` is one whole input from previous parent, since one parent may contains multiple outputs.
-Finally, `int array option array array` includes output from all parents.
-The main function `Owl_symbolic_shape.infer_shape` then infers the output shape of current node, and save it to the `out_shape` property of that symbol.
-
-The `infer_shape` function itself checks the symbol type and then match with specific implementation.
-For example, a large number of operations actually takes one parent and keep its output shape:
-
-```
-let infer_shape input_shapes sym =
- | Sin _ -> infer_shape_01 input_shapes
- | Exp _ -> infer_shape_01 input_shapes
- | Log _ -> infer_shape_01 input_shapes
-....
-
-let infer_shape_01 input_shapes =
- match input_shapes.(0).(0) with
- | Some s -> [| Some Array.(copy s) |]
- | None -> [| None |]
-```
-
-This pattern `infer_shape_01` covers these operations. It simply takes the input shape, and returns the same shape.
-
-There are two possible reasons for the input shape to be `None`.
-At first each node will be initialised with `None` output shape.
-During shape inference, in certain cases, the output shape depends on the runtime content of input nodes, not just the shapes of input nodes and attributions of the currents node.
-In that case, the output shapes is set to `None`.
-Once the input shapes contain `None`, the shape inference results hereafter will all be `None`, which means the output shapes cannot be decided at compile time.
-
-**Multiple output**
-
-Most of the operators are straightforward to implement, but some of them returns multiple symbols as return.
-In that case, an operation returns not a node, but a tuple or, when output numbers are uncertain, an array of nodes.
-For example, the `MaxPool` operation returns two outputs, one is the normal maxpooling result, and the other is the corresponding tensor that contains indices of the selected values during pooling.
-Or we have the `Split` operation that splits a tensor into a list of tensors, along the specified axis. It returns an array of symbols.
-
-### Engines
-
-Based on this simple core abstraction, we use different *engines* to provide functionalities: converting to and from other computation expression formats, print out to human-readable format, graph optimisation, etc.
-As we have said, the core part is kept minimal. If the engines require information other than what the core provides, each symbol has an `attr` property as extension point.
-
-All engines must follow the signature below:
-
-```ocaml file=../../examples/code/symbolic/interface_01.mli
-type t
-
-val of_symbolic : Owl_symbolic_graph.t -> t
-val to_symbolic : t -> Owl_symbolic_graph.t
-val save : t -> string -> unit
-val load : string -> t
-```
-
-It means that, each engine has its own core type `t`, be it a string or another format of graph, and it needs to convert `t` to and from the core symbolic graph type, or save/load a type `t` data structure to file.
-An engine can also contain extra functions besides these four.
-
-Now that we have explained the design of `owl_symbolic`, let's look at the details of some engines in the next few sections.
-
-## ONNX Engine
-
-The ONNX Engine is the current focus of development in `owl_symbolic`.
-[ONNX](https://onnx.ai) is a widely adopted open neural network exchange format. A neural network model defined in ONNX can be, via suitable converters, can be run on different frameworks and thus hardware accelerators.
-The main target of ONNX is to promote the interchangeability of neural network and machine learning models, but it is worthy of noting that the standard covers a lot of basic operations in scientific computation, such as power, logarithms, trigonometric functions, etc.
-Therefore, ONNX engines serves as a good starting point for its coverage of operations.
-
-Taking a symbolic graph as input, how would then the ONNX engine produce ONNX model? We use the [ocaml-protoc](https://github.com/mransan/ocaml-protoc), a protobuf compiler for OCaml, as the tool. The ONNX specification is defined in an [onnx.proto](https://github.com/onnx/onnx/blob/master/onnx/onnx.proto) file, and the `ocaml-protoc` can compile this protobuf files into OCaml types along with serialisation functions for a variety of encodings.
-
-For example, the toplevel message type in onnx.proto is `ModelProto`, defined as follows:
-
-```proto
-message ModelProto {
- optional int64 ir_version = 1;
- repeated OperatorSetIdProto opset_import = 8;
- optional string producer_name = 2;
- optional string producer_version = 3;
- optional string domain = 4;
- optional int64 model_version = 5;
- optional string doc_string = 6;
- optional GraphProto graph = 7;
- repeated StringStringEntryProto metadata_props = 14;
-};
-```
-
-And the generated OCaml types and serialisation function are:
-
-```ocaml file=../../examples/code/symbolic/interface_00.mli
-open Owl_symbolic_specs.PT
-
-type model_proto =
- { ir_version : int64 option
- ; opset_import : operator_set_id_proto list
- ; producer_name : string option
- ; producer_version : string option
- ; domain : string option
- ; model_version : int64 option
- ; doc_string : string option
- ; graph : graph_proto option
- ; metadata_props : string_string_entry_proto list
- }
-
-val encode_model_proto : Onnx_types.model_proto -> Pbrt.Encoder.t -> unit
-```
-Besides the meta information such as model version and IR version etc., a model is mainly a graph, which includes input/output information and an array of nodes.
-A node specifies operator type, input and output node name, and its own attributions, such as the `axis` attribution in reduction operations.
-
-Therefore, all we need is to build up a `model_proto` data structure gradually from attributions to nodes, graph and model. It can then be serialised using `encode_model_proto` to generate a protobuf format file, and that is the ONNX model we want.
-
-Besides building up the model, one other task to be performed in the engine is type checking and type inferencing. The [operator documentation](https://github.com/onnx/onnx/blob/master/docs/Operators.md) lists the type constraints of each operator. For example, the sine function can only accept input of float or double number types, and generate the same type of input as that of input.
-Each type of operator has its own rules of type checking and inferencing. Starting from input nodes, which must contain specific type information, this chain if inferencing can thus verify the whole computation meets the type constraints for each node, and then yield the final output types of the whole graph.
-The reason that type checking is performed at the engine side instead of the core is that each engine may have different type constraints and type inferencing rules for the operators.
-
-### Example 1: Basic operations
-
-Let's look at a simple example.
-
-```ocaml
-open Owl_symbolic
-open Op
-open Infix
-
-let x = variable "X"
-let y = variable "Y"
-let z = exp ((sin x ** float 2.) + (cos x ** float 2.)) + (float 10. * (y ** float 2.))
-let g = SymGraph.make_graph [| z |] "sym_graph"
-let m = ONNX_Engine.of_symbolic g
-let _ = ONNX_Engine.save m "test.onnx"
-```
-
-After including necessary library component, the first three line of code creates a symbolic representation `z` using the symbolic operators such as `sin`, `pow` and `float`. The `x` and `y` are variables that accept user input. It is then used to create a symbolic graph. This step mainly checks if there is any duplication of node names.
-Then the `of_symbolic` function in ONNX engine takes the symbolic graph as input, and generates a `model_proto` data structure, which can be further saved as a model named `test.onnx`.
-
-To use this ONNX model we could use any framework that supports ONNX. Here we use the Python-based [ONNX Runtime](https://github.com/microsoft/onnxruntime) as an example. We prepare a simple Python script as follows:
-
-```python
-import numpy as np
-import math
-import onnxruntime as rt
-
-sess = rt.InferenceSession("test.onnx")
-input_name_x = sess.get_inputs()[0].name
-input_name_y = sess.get_inputs()[1].name
-x = np.asarray(math.pi, dtype="float32")
-y = np.asarray(3., dtype="float32")
-
-pred_onx = sess.run(None, {input_name_x: x, input_name_y: y})[0]
-print(pred_onx)
-```
-This script is very simple: it loads the ONNX model we have just created, and then get the two input variables, and assign two values to them in the `sess.run` command. All the user need to know in advance is that there are two input variables in this ONNX model. Note that we could define not only scalar type input but also tensor type variables in `owl_symbolic`, and then assign NumPy array to them when evaluating.
-
-
-### Example 2: Variable Initialisation
-
-We can initialise the variables with tensor values so that these default values are used even if no data are passed in.
-Here is one example:
-
-```ocaml
-open Owl_symbolic
-open Op
-
-let _ =
- let flt_val = [| 1.; 2.; 3.; 4.; 5.; 6. |] in
- let t = Type.make_tensor ~flt_val [| 2; 3 |] in
- let x = variable ~init:t "X" in
- let y = sin x in
- let g = SymGraph.make_graph [| y |] "sym_graph" in
- let z = ONNX_Engine.of_symbolic g in
- ONNX_Engine.save z "test.onnx"
-```
-
-This computation simply takes an input variable `x` and then apply the `sin` operation.
-Let's look at the Python side.
-
-```python
-import numpy as np
-import onnxruntime as rt
-
-sess = rt.InferenceSession("test.onnx")
-pred_onx = sess.run(None, input_feed={})
-print(pred_onx[0])
-```
-
-The expected output is:
-
-```python
-[[ 0.84147096 0.9092974 0.14112 ]
- [-0.7568025 -0.9589243 -0.2794155 ]]
-```
-
-Note how the initializer works without user providing any input in the input feed dictionary.
-Of course, the users can still provide their own data to this computation, but the mechanism may be a bit different.
-For example, in `onnx_runtime`, using `sess.get_inputs()` gives an empty set this time.
-Instead, you should use `get_overridable_initializers()`:
-
-```python
-input_x = sess.get_overridable_initializers()[0]
-input_name_x = input_x.name
-input_shape_x = input_x.shape
-x = np.ones(input_shape_x, dtype="float32")
-pred_onx = sess.run(None, {input_name_x: x})
-```
-
-### Example 3: Neural network
-
-The main purpose of the ONNX standard is for expressing neural network models, and we have already cover most of the common operations that are required to construct neural networks.
-However, to construct a neural network model directly from existing `owl_symbolic` operations requires a lot of details such as input shapes or creating extra nodes.
-For example, if you want to build a neural network with operators directly, you need to write something like:
-
-```
-let dnn =
- let x = variable ~shape:[| 100; 3; 32; 32 |] "X" in
- let t_conv0 = conv ~padding:Type.SAME_UPPER x
- (random_uniform ~low:(-0.138) ~high:0.138 [| 32; 3; 3; 3 |]) in
- let t_zero0 =
- let flt_val = Array.make 32 0. in
- let t = Type.make_tensor ~flt_val [| 32 |] in
- tensor t
- in
- let t_relu0 = relu (t_conv0 + t_zero0) in
- let t_maxpool0, _ = maxpool t_relu0 ~padding:VALID ~strides:[| 2; 2 |] [| 2; 2 |] in
- let t_reshape0 = reshape [| 100; 8192 |] t_maxpool0 in
- let t_rand0 = random_uniform ~low:(-0.0011) ~high:0.0011 [| 8192; 512 |] in
- ....
-```
-
-Apparently that's too much information for the users to handle.
-To make things easier for the users, we create neural network layer based on existing symbolic operations. This light-weight layer takes only 180 LoC, and yet it provides an Owl-like clean syntax for the users to construct neural networks. For example, we can construct a MNIST-DNN model:
-
-```ocaml
-open Owl_symbolic_neural_graph
-let nn =
- input [| 100; 3; 32; 32 |]
- |> normalisation
- |> conv2d [| 32; 3; 3; 3 |] [| 1; 1 |]
- |> activation Relu
- |> max_pool2d [| 2; 2 |] [| 2; 2 |] ~padding:VALID
- |> fully_connected 512
- |> activation Relu
- |> fully_connected 10
- |> activation (Softmax 1)
- |> get_network
-
-let _ =
- let onnx_graph = Owl_symbolic_engine_onnx.of_symbolic nn in
- Owl_symbolic_engine_onnx.save onnx_graph "test.onnx"
-```
-
-Besides this simple DNN, we have also created the complex architectures such as ResNet, InceptionV3, SqueezeNet, etc.
-They are all adapted from existing Owl DNN models with only minor change.
-The execution of the generated ONNX model is similar:
-
-```python
-import numpy as np
-import onnxruntime as rt
-
-sess = rt.InferenceSession("test.onnx")
-input_name_x = sess.get_inputs()[0].name
-input_name_shape = sess.get_inputs()[0].shape
-input_x = np.ones(input_name_shape , dtype="float32")
-pred_onx = sess.run(None, {input_name_x: input_x})[0]
-```
-
-For simplicity, we generate a dummy input for the execution/inference phase of this model.
-Of course, currently in our model the weight data is not trained.
-Training of a model should be completed on a framework such as TensorFlow. Combining trained weight data into the ONNX model remains to be a future work.
-
-Furthermore, by using tools such as `js_of_ocaml`, we can convert both examples into JavaScript; executing them can create the ONNX models, which in turn can be executed on the browser using [ONNX.js](https://github.com/microsoft/onnxjs) that utilises WebGL.
-In summary, using ONNX as the intermediate format for exchange computation across platforms enables numerous promising directions.
-
-## LaTeX Engine
-
-The LaTeX engine takes a symbolic representation as input, and produce LaTeX strings which can then be visualised using different tools.
-Its design is simple, mainly about matching symbol type and projecting it to correct implementation.
-Again, let's look at an example that builds up a symbolic representation of a calculation $\exp(\sin(x_0) ^ 2 + \cos(x_0) ^ 2) + 10 \times x_0 ^ 2 + \exp(\pi~i)$
-
-```ocaml env=symbolic:latex-engine
-open Owl_symbolic
-open Op
-open Infix
-
-let make_expr0 () =
- let x = variable "x_0" in
- let y =
- exp ((sin x ** float 2.) + (cos x ** float 2.))
- + (float 10. * (x ** float 2.))
- + exp (pi () * complex 0. 1.)
- in
- SymGraph.make_graph [| y |] "sym_graph"
-```
-
-This expression can be converted into a corresponding LaTeX string:
-
-```ocaml env=symbolic:latex-engine
-# let () = make_expr0 ()
- |> LaTeX_Engine.of_symbolic
- |> print_endline
-\exp(\sin(x_0) ^ 2 + \cos(x_0) ^ 2) + 10 \times x_0 ^ 2 + \exp(\pi \times 1.00i)
-```
-
-Simply putting it in the raw string form is not very helpful for visualisation.
-We have built a web UI in this Engine that utilises [KaTeX](https://katex.org/), which renders LaTeX string directly on a browser.
-Below we use the `html` function provided by the engine to show this string on our web UI using the functionality the engine provides.
-
-```ocaml env=symbolic:latex-engine
-# let () =
- let exprs = [ make_expr0 () ] in
- LaTeX_Engine.html ~dot:true ~exprs "example.html"
-```
-
-The generated "example.html" webpage is a standalone page that contains all the required scripts. Once opened in a browser, it looks like this:
-
-{ width=90% #fig:symbolic:ui}
-
-For each expression, the web UI contains its rendered LaTeX form and corresponding computation graph.
-
-## Owl Engine
-
-An Owl Engine enables converting Owl computation graph to or from a symbolic representation. Symbolic graph can thus benefit from the concise syntax and powerful features such as Algorithm Differentiation in Owl.
-
-The conversion between Owl CGraph and the symbolic representation is straightforward, since both are graph structures.
-We only need to focus on make the operation projection between these two systems correct.
-
-```
-let cnode_attr = Owl_graph.attr node in
-match cnode_attr.op with
-| Sin -> Owl_symbolic_operator.sin ~name sym_inputs.(0)
-| Sub -> Owl_symbolic_operator.sub ~name sym_inputs.(0) sym_inputs.(1)
-| SubScalar -> Owl_symbolic_operator.sub ~name sym_inputs.(0) sym_inputs.(1)
-| Conv2d (padding, strides) ->
- let pad =
- if padding = SAME then Owl_symbolic_types.SAME_UPPER else Owl_symbolic_types.VALID
- in
- Owl_symbolic_operator.conv ~name ~padding:pad ~strides sym_inputs.(0) sym_inputs.(1)
-```
-
-The basic logic is simple: find the type of symbol and its input node in CGraph, and then do the projection to symbolic representation.
-For most of the math operators such as `sin`, the projection is one-to-one, but that's not all the cases.
-For some operations such as subtraction, we have `Sub`, `SubScalar` and `ScalarSub` etc. depending on the type of input, but they can all be projected to the `sub` operator in symbolic representation.
-Or for the convolution operation, we need to first convert the parameters in suitable way before the projection.
-
-Let's see an example of using the Owl engine:
-
-```ocaml env=symbolic:owl-engine
-open Owl_symbolic
-module G = Owl_computation_cpu_engine.Make (Owl_algodiff_primal_ops.S)
-module AD = Owl_algodiff_generic.Make (G)
-module OWL_Engine = Owl_symbolic_engine_owl.Make (G)
-
-let make_graph () =
- let x = G.ones [| 2; 3 |] |> AD.pack_arr in
- let y = G.var_elt "y" |> AD.pack_elt in
- let z = AD.Maths.(sin x + y) in
- let input = [| AD.unpack_elt y |> G.elt_to_node |] in
- let output = [| AD.unpack_arr z |> G.arr_to_node |] in
- G.make_graph ~input ~output "graph"
-
-let g = make_graph () |> OWL_Engine.to_symbolic
-```
-
-Here we build a simple computation graph with the algorithmic differentiation module in Owl.
-Then we perform the conversion by calling `OWL_Engine.to_symbolic`.
-
-We can also chain multiple engines together. For example, we can use Owl engine to converge the computation define in Owl to symbolic graph, which can then be converted to ONNX model and get executed on multiple frameworks.
-Here is such an example. A simple computation graph created by `make_graph ()` is processed by two chained engines, and generates an ONNX model.
-
-
-```ocaml env=symbolic:owl-engine
-let _ =
- let k = make_graph () |> OWL_Engine.to_symbolic |> ONNX_Engine.of_symbolic in
- ONNX_Engine.save k "test.onnx"
-```
-
-And this `test.onnx` file can further be processed with Python code as introduced in the previous section.
-
-## Summary
-
-To improve the performance of computation, it is necessary to utilise the power of hardware accelerators. We believe it is a growing trend that the definition and execution of computation can be separated out.
-Therefore, we build a symbolic representation based on Owl to facilitate exporting computations to other frameworks that supports multiple hardware accelerators.
-This representation can be executed by multiple backend engines. Currently it supports the ONNX, LaTeX, and Owl itself as engines.
-This chapter introduces the design of this symbolic representation, and uses several examples to demonstrate how the computation in Owl can be executed on other frameworks or visualised.
-Implementing a symbolic computation library based on Owl remains our future work.
diff --git a/book/symbolic/dune b/book/symbolic/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/symbolic/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/symbolic/dune.inc b/book/symbolic/dune.inc
deleted file mode 100644
index 8adac3c..0000000
--- a/book/symbolic/dune.inc
+++ /dev/null
@@ -1,13 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- (:y1 ../../examples/code/symbolic/interface_00.mli)
- (:y0 ../../examples/code/symbolic/interface_01.mli)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected)
- (diff? %{y1} %{y1}.corrected)
- (diff? %{y0} %{y0}.corrected))))
diff --git a/book/symbolic/prelude.ml b/book/symbolic/prelude.ml
deleted file mode 100644
index 0f30636..0000000
--- a/book/symbolic/prelude.ml
+++ /dev/null
@@ -1,9 +0,0 @@
-#require "owl-top,owl-symbolic";;
-
-open Owl
-open Bigarray
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/testing/dune b/book/testing/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/testing/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/testing/dune.inc b/book/testing/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/testing/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/testing/prelude.ml b/book/testing/prelude.ml
deleted file mode 100644
index 94a5a77..0000000
--- a/book/testing/prelude.ml
+++ /dev/null
@@ -1,9 +0,0 @@
-#require "owl-top,alcotest";;
-
-open Owl
-open Bigarray
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/titlepage.html b/book/titlepage.html
deleted file mode 100644
index 4ce7baf..0000000
--- a/book/titlepage.html
+++ /dev/null
@@ -1,22 +0,0 @@
-
-
-
-
-
-
-
-
-
-
-
- Owl Online Tutorials
-
- First Edition
-
-
- Some Author
-
-
-
diff --git a/book/toc.html b/book/toc.html
deleted file mode 100644
index 4b5c617..0000000
--- a/book/toc.html
+++ /dev/null
@@ -1,15 +0,0 @@
-
-
-
-
-
-
-
-
-
-
-
-
-
-
diff --git a/book/toc.scm b/book/toc.scm
deleted file mode 100644
index 8665d98..0000000
--- a/book/toc.scm
+++ /dev/null
@@ -1,47 +0,0 @@
-(chapter prologue)
-
-(part
- ((title "Numerical Techniques")
- (chapters
- (introduction
- convention
- visualisation
- maths
- stats
- ndarray
- slicing
- linear-algebra
- diffequation
- signal
- algodiff
- optimisation
- regression
- neural-network
- nlp
- dataframe
- symbolic
- ))))
-
-(part
- ((title "System Architecture")
- (chapters
- (architecture
- core-opt
- aeos
- cgraph
- zoo
- backend
- distributed
- testing
- constant
- utilities
- ))))
-
-(part
- ((title "Case Studies")
- (chapters
- (case-image-inception
- case-obj-detect
- case-nst
- case-recommender
- ))))
diff --git a/book/utilities/README.md b/book/utilities/README.md
deleted file mode 100644
index 1188c84..0000000
--- a/book/utilities/README.md
+++ /dev/null
@@ -1,448 +0,0 @@
-# Internal Utility Modules
-
-During development of Owl, we find some utility modules are immensely handy.
-In this chapter, we share some of them.
-These are not the main feature of Owl, and perhaps you can implement your own version very quickly.
-But we hope to present how these features are used in Owl.
-
-## Dataset Module
-
-The dataset modules provide easy access to various datasets to be used in Owl, mainly the MNSIT and CIFAR10 datasets.
-You can get all these data in Owl by executing: `Dataset.download_all ()`.
-The data are downloaded in the home directory, for example, `~/.owl/dataset` on Linux.
-
-### MNIST
-
-The [MNIST database](http://yann.lecun.com/exdb/mnist/) of handwritten digits has a training set of 60,000 examples,
-and a test set of 10,000 examples. Each example is of size 28 x 28.
-It is a good starting point for deep neural network related tasks.
-You can get MNIST data via these Owl functions:
-
-- `Dataset.load_mnist_train_data ()`: returns a triplet `x, y, y'`.
- + `x` is a [60000, 784] ndarray (`Owl_dense_ndarray.S.mat`) where each row represents a [28, 28] image.
- + `y` is a [60000, 1] label ndarray. Each row is an integer ranging from 0 to 9,
- indicating the digit on each image.
- + `y'` is a [60000, 10] label ndarray. Each one-hot row vector corresponds to
- one label.
-
-- `Dataset.load_mnist_test_data ()`: returns a triplet.
- Similar to `load_mnist_train_data`, only that it returns the test set, so
- the example size is 10,000 instead of 60,000.
-
-- `Dataset.load_mnist_train_data_arr ()`: similar to `load_mnist_train_data`, but returns `x` as [60000,28,28,1] ndarray
-
-- `Dataset.load_mnist_test_data_arr ()`: similar to
- `load_mnist_train_data_arr`, but it returns the test set, so the example size
- is 10, 000 instead of 60, 000.
-
-- `Dataset.draw_samples x y n` draws `n` random examples from images ndarray `x` and label ndarray `y`.
-
-Here is what the dataset looks like when loaded into Owl:
-
-```
-# let x, _, y = Dataset.load_mnist_train_data_arr ();;
-val x : Owl_dense_ndarray.S.arr =
-
- C0
- R[0,0,0] 0
- R[0,0,1] 0
- R[0,0,2] 0
- R[0,0,3] 0
- R[0,0,4] 0
- ...
-R[59999,27,23] 0
-R[59999,27,24] 0
-R[59999,27,25] 0
-R[59999,27,26] 0
-R[59999,27,27] 0
-
-val y : Owl_dense_matrix.S.mat =
-
- C0 C1 C2 C3 C4 C5 C6 C7 C8 C9
- R0 0 0 0 0 0 1 0 0 0 0
- R1 1 0 0 0 0 0 0 0 0 0
- R2 0 0 0 0 1 0 0 0 0 0
- R3 0 1 0 0 0 0 0 0 0 0
- R4 0 0 0 0 0 0 0 0 0 1
- ... ... ... ... ... ... ... ... ... ...
-R59995 0 0 0 0 0 0 0 0 1 0
-R59996 0 0 0 1 0 0 0 0 0 0
-R59997 0 0 0 0 0 1 0 0 0 0
-R59998 0 0 0 0 0 0 1 0 0 0
-R59999 0 0 0 0 0 0 0 0 1 0
-```
-
-You can find the MNIST dataset used in training and testing a DNN in Owl:
-
-```
-let train network =
- let x, _, y = Dataset.load_mnist_train_data_arr () in
- Graph.train network x y |> ignore;
- network
-
-let test network =
- let imgs, _, labels = Dataset.load_mnist_test_data () in
- let m = Dense.Matrix.S.row_num imgs in
- let imgs = Dense.Ndarray.S.reshape imgs [|m;28;28;1|] in
-
- let mat2num x = Dense.Matrix.S.of_array (
- x |> Dense.Matrix.Generic.max_rows
- |> Array.map (fun (_,_,num) -> float_of_int num)
- ) 1 m
- in
-
- let pred = mat2num (Graph.model network imgs) in
- let fact = mat2num labels in
- let accu = Dense.Matrix.S.(elt_equal pred fact |> sum') in
- Owl_log.info "Accuracy on test set: %f" (accu /. (float_of_int m))
-```
-
-### CIFAR-10
-
-The [CIFAR-10 dataset](https://www.cs.toronto.edu/~kriz/cifar.html) include small scale color images for more realistic complex image classification tasks.
-It includes 10 classes of images: aeroplane, automobile, bird, cat, deer, dog, frog, horse, ship, truck.
-It consists of 60,000 32 x 32 colour images in 10 classes, with 6,000 images per class. There are 50,000 training images and 10,000 test images.
-
-Due to the limit of file size on GitHub, the training set is cut into 5 smaller batches. You can get CIFAR-10 data using `Owl`:
-
-- `Dataset.load_cifar_train_data batch`: returns a triplet `x, y, y'`.
- + The input paramter `batch` can range from 1 to 5, indicating which training set batch to choose.
- + `x` is an [10000, 32, 32, 3] ndarray (`Owl_dense_ndarray.S.arr`). The last
- dimension indicates color channels (first Red, then Green, finally Blue).
- + `y` is an [10000, 1] label ndarray, each number representing
- an image class.
- + `y'` is the corresponding [10000, 10] one-hot label ndarray.
-
-- `Dataset.load_cifar_test_data ()`: similar to `load_cifar_train_data`, only
- that it loads test data.
-
-- `Dataset.draw_samples_cifar x y n` draws `n` random examples from images ndarray `x` and label ndarray `y`.
-
-Note that all elements in the loaded matrices and ndarrays are of `float32` format.
-The CIFAR10 dataset can be loaded in a similar way as MNIST:
-
-```
-let train network =
- let x, _, y = Dataset.load_cifar_train_data 1 in
- Graph.train network x y
-```
-
-## Graph Module
-
-The Graph module in Owl provides a general data structure to manipulate graphs. It is defined as:
-
-```ocaml
-type 'a node =
- { mutable id : int
- ; (* unique identifier *)
- mutable name : string
- ; (* name of the node *)
- mutable prev : 'a node array
- ; (* parents of the node *)
- mutable next : 'a node array
- ; (* children of the node *)
- mutable attr : 'a (* indicate the validity *)
- }
-```
-
-The attribution here is generic so that you can define your own graph where each node contains an integer, a string, or any data type you define.
-This makes the graph module extremely flexible.
-
-Graph module provides a rich set of APIs.
-First, you can build a Graph using these methods:
-
-- `node ~id ~name ~prev ~next attr` creates a node with given id and name
-string. The created node is also connected to parents in ``prev`` and children
-in ``next``. The ``attr`` will be saved in ``attr`` field.
-
-- `connect parents children` connects a set of parents to a set of children.
-The created links are the Cartesian product of parents and children. In other
-words, they are bidirectional links between parents and children.
-Note that this function does not eliminate any duplicates in the array.
-
-- `connect_descendants parents children` connects parents to their children.
-This function creates unidirectional links from parents to children. In other
-words, this function saves `children` to `parent.next` field.
-
-- `connect_ancestors parents children` connects children to their parents.
-This function creates unidirectional links from children to parents. In other
-words, this function saves `parents` to `child.prev` field.
-
-- `remove_node x` removes node `x` from the graph by disconnecting itself
-from all its parent nodes and child nodes.
-
-- `remove_edge src dst` removes a link `src -> dst` from the graph. Namely,
-the corresponding entry of `dst` in `src.next` and `src` in `dst.prev`
-will be removed. Note that it does not remove [dst -> src] if there exists one.
-
-- `replace_child x y` replaces `x` with `y` in `x` parents. Namely, `x`
-parents now make link to `y` rather than `x` in `next` field.
-Note that the function does not make link from `y` to `x` children. Namely,
-the `next` field of `y` remains intact.
-
-
-Then, to obtain and update properties of a graph using these functions:
-
-```
-val id : 'a node -> int
-(** ``id x`` returns the id of node ``x``. *)
-
-val name : 'a node -> string
-(** ``name x`` returns the name string of node ``x``. *)
-
-val set_name : 'a node -> string -> unit
-(** ``set_name x s`` sets the name string of node ``x`` to ``s``. *)
-
-val parents : 'a node -> 'a node array
-(** ``parents x`` returns the parents of node ``x``. *)
-
-val set_parents : 'a node -> 'a node array -> unit
-(** ``set_parents x parents`` set ``x`` parents to ``parents``. *)
-
-val children : 'a node -> 'a node array
-(** ``children x`` returns the children of node ``x``. *)
-
-val set_children : 'a node -> 'a node array -> unit
-(** ``set_children x children`` sets ``x`` children to ``children``. *)
-
-val attr : 'a node -> 'a
-(** ``attr x`` returns the ``attr`` field of node ``x``. *)
-
-val set_attr : 'a node -> 'a -> unit
-(** ``set_attr x`` sets the ``attr`` field of node ``x``. *)
-```
-
-Similarly, you can get other properties of a graph use the other functions:
-
-- `indegree x` returns the in-degree of node
-- `outdegree x` returns the out-degree of node
-- `degree x` returns the total number of links of `x`
-- `num_ancestor x` returns the number of ancestors of `x`
-- `num_descendant x` returns the number of descendants of `x`
-- `length x` returns the total number of ancestors and descendants of `x`
-
-Finally, we provide functions for traversing the graph in either Breadth-First order or Depth-First order.
-You can also choose to iterate the descendants or ancestors of a given node.
-
-```
-val iter_ancestors
- : ?order:order
- -> ?traversal:traversal
- -> ('a node -> unit)
- -> 'a node array
- -> unit
-(** Iterate the ancestors of a given node. *)
-
-val iter_descendants
- : ?order:order
- -> ?traversal:traversal
- -> ('a node -> unit)
- -> 'a node array
- -> unit
-(** Iterate the descendants of a given node. *)
-
-val iter_in_edges : ?order:order -> ('a node -> 'a node -> unit) -> 'a node array -> unit
-(** Iterate all the in-edges of a given node. *)
-
-val iter_out_edges : ?order:order -> ('a node -> 'a node -> unit) -> 'a node array -> unit
-(** Iterate all the out-edges of a given node. *)
-
-val topo_sort : 'a node array -> 'a node array
-(** Topological sort of a given graph using a DFS order. Assumes that the graph is acyclic.*)
-```
-
-You can also use functions: `filter_ancestors`, `filter_descendants`, `fold_ancestors`, `fold_descendants`, `fold_in_edges`, and `fold_out_edges` to perform fold or filter operations when iterating the graph.
-Within Owl, the Graph module is heavily use to facilitate other modules such as the Computation Graph module to provide the basic graph structuring functionalities. We will discuss the Computation Graph in detail in later chapter in the book.
-
-## Stack and Heap Modules
-
-Both *Stack* and *Heap* are two common abstract data types for collection of elements.
-They are also used in Owl code.
-Similar to graph, they use generic types so that any data type can be plugged in.
-Here is the definition of a stack:
-
-```ocaml
-type 'a t =
- { mutable used : int
- ; mutable size : int
- ; mutable data : 'a array
- }
-```
-
-The stack and heap modules support four standards operations:
-
-- `push`: push element into a stack/heap
-- `pop`: pops the top element in stack/heap. It returns None if the container is empty
-- `peek`: returns the value of top element in stack/heap but it does not remove the element from the stack. `None` is returned if the container is empty.
-- `is_empty`: returns true if the stack/heap is empty
-
-The stack data structure is used in many places in Owl:
-the `filteri` operation in ndarray module,
-the topological sort in graph,
-the reading file IO operation for keeping the content from all the lines,
-the data frame...
-The heap structure is used in key functions such as `search_top_elements` in the `Ndarray` module, which searches the indices of top values in input ndarray according to the comparison function.
-
-## Count-Min Sketch
-
-*Count-Min Sketch* is a probabilistic data structure for computing approximate counts. It is particularly ideal for use when the space is limited and exact results are not required.
-Imagine that we want to count how frequent certain elements are in a realtime stream, what would you do?
-An intuitive answer is that you can create a hash table, with the element as key and its count as value.
-The problem with this solution is that the stream could have millions and billions of elements. Even if you somehow manage to cut the long tail (such as the unique elements), the storage requirement is still terribly large.
-
-Now that you think about it, you don't really care about the precise count of an element from the stream. What you really need is an estimation that is not very far away from the true.
-That leaves space for optimising the solution.
-First, apply a hashing function and use `h(e)` as the key, instead of the element `e` itself.
-Besides, the total number of key-value pairs can be limited.
-Towards the end, this approach can be summarised as three steps:
-
-1. initialise an array of $n$ elements, each set to 0;
-2. when processing one element $e$, increase the count of the hashed index: `count[h(e)] += 1`;
-3. when querying the count for certain element, just return `count[h(e)]`.
-
-Obviously, this approach tends to give an overestimated answer because of the inevitable collision in hash table.
-Here the *Count-Min Sketch* method comes to help.
-Its basic idea is simple: follow the process stated above, but the only difference is that now instead of maintaining a vector of length $n$, we now need to maintain a matrix of shape $dxn$, i.e. $d$ rows and $n$ columns.
-Each row is assigned with a different hash function, and when processing one element $e$, apply $h_0, h_1, \ldots, h_d$ to it, and make $count[i][h_i(e)] += 1$, for each $i = 0, 1, 2, \ldots, d$.
-At any time if you want to know the count of an element $e$, you again apply the same set of hash functions, retrieve the $d$ counts of this element from all the rows, and choose the smallest count to return.
-This process is shown in [@fig:utilities:count-min] ([Src](https://blog.csdn.net/u012315428/article/details/79338773)).
-
-{width=90% #fig:utilities:count-min }
-
-In this way, the effect of collision is reduced in the counting.
-The reason is simple: if these different hashing functions are independent, then the probability that the same element leads to collision in multiple lines can be exponentially reduced with more hash function used.
-
-Even though this method looks like just a heuristic, it actually provides a theoretical guarantee of its counting error.
-Specifically, we have two error bounds parameter: failure probability $\sigma$, and the approximation ratio $\epsilon$, and let $s$ be the sum of all counts stored in the data structure.
-It can be proved that with a probability of $1-\sigma$, the error between the estimated count and the true count is $\epsilon~s$ at most.
-The detailed proof can be seen in the original paper [@cormode2005improved].
-Note that this guarantee implies that elements that appear more frequently will have more accurate counts, since the maximum possible error in a count is linear in the total number of counts in the data structure.
-
-Owl has provided this probabilistic data structure.
-It is implemented by [Pratap Singh](https://pratap.dev/ocaml/owl/count-min-sketch/sublinear-algorithms/countmin-sketch/).
-Owl provides these interfaces for use:
-
-```
-module type Sig = sig
- type 'a sketch
- (** The type of Count-Min sketches *)
-
- (** {6 Core functions} *)
-
- val init : epsilon:float -> delta:float -> 'a sketch
- (**
-``init epsilon delta`` initializes a sketch with approximation ratio
-``(1 + epsilon)`` and failure probability ``delta``.
- *)
-
- val incr : 'a sketch -> 'a -> unit
- (** ``incr s x`` increments the frequency count of ``x`` in sketch ``s`` in-place. *)
-
- val count : 'a sketch -> 'a -> int
- (** ``count s x`` returns the estimated frequency of element ``x`` in ``s``. *)
-
- val init_from : 'a sketch -> 'a sketch
- (**
- ``init_from s`` initializes a new empty sketch with the same parameters as ``s``, which
- can later be merged with ``s``.
- *)
-
- val merge : 'a sketch -> 'a sketch -> 'a sketch
- (**
- ``merge s1 s2`` returns a new sketch whose counts are the sum of those in ``s1`` and ``s2``.
- Raises ``INVALID_ARGUMENT`` if the parameters of ``s1`` and ``s2`` do not match.
- *)
-end
-```
-
-Owl provides two different implementations of the underlying table of counts, one based on the OCaml native array and one based on the Owl `ndarray`. These are exported as `Owl_base.Countmin_sketch.Native` and `Owl_base.Countmin_sketch.Owl` respectively. In our testing, we have found the OCaml native array to be about 30% faster.
-
-As an example, we can use the count-min sketch to calculate the frequencies of some words in a large corpus. The code below builds a count-min sketch and fills it with text data from [here](https://github.com/ryanrhymes/owl_dataset), a corpus of online news articles of about 61 million words. It then tests for the frequencies of some common words and one that doesn't appear. WARNING: this code will download the file [news.txt.gz](https://github.com/ryanrhymes/owl_dataset) (96.5MB) onto your machine and expand it into news.txt (340.3MB).
-
-```
-module CM = Owl_base.Countmin_sketch.Native
-
-let get_corpus () =
- let fn = "news.txt" in
- if not (Sys.file_exists (Owl_dataset.local_data_path () ^ fn)) then
- Owl_dataset.download_data (fn ^ ".gz");
- open_in (Owl_dataset.local_data_path () ^ fn)
-
-let get_line_words inch =
- let regexp = Str.regexp "[^A-Za-z]+" in
- try
- Some ((input_line inch) |> Str.split regexp)
- with
- End_of_file -> None
-
-let fill_sketch inch epsilon delta =
- let c = CM.init ~epsilon ~delta in
- let rec aux () =
- match get_line_words inch with
- | Some lst -> List.iter (CM.incr c) lst; aux ()
- | None -> c in
- aux ()
-
-let _ =
- let inch = get_corpus () in
- let c = fill_sketch inch 0.001 0.001 in
- let words = ["the"; "and"; "of"; "said"; "floccinaucinihilipilification"] in
- List.iter (fun word -> Printf.printf "%s: %d\n" word (CM.count c word)) words
-
-```
-
-The example output is shown below.
-It shows that the common words appear with accurate counts, but the word which does not appear in the text gets a positive count.
-
-```
-the: 3378663
-and: 1289949
-of: 1404742
-said: 463257
-floccinaucinihilipilification: 15540
-```
-
-The count-min sketch is a useful data structure when we are interested in approximate counts of important objects in a data set.
-One such application is to find *heavy hitters*--for example, finding out the most popular web pages given a very long website access log. Formally, the $k$-heavy-hitters of a dataset are those elements that occur with relative frequency at least $1/k$. So the 100-heavy-hitters are the elements which each appear at least 1% of the time in the dataset.
-
-We can use the count-min sketch, combined with a min-heap, to find the $k$-heavy-hitters in a particular dataset. The general idea is to maintain in the heap all the current heavy hitters, with the lowest-count heavy hitter at the top. Whenever we get a new element, we add it to the count-min sketch, and then get its count from the sketch.
-If the relative frequency of that element is greater than $1/k$, we add it to the heap.
-Then, we check if the current minimum element in the heap has gone below the relative frequency threshold of $1/k$, and if so remove it from the heap.
-We repeat this process to remove all heavy hitters whose relative frequency is below $1/k$. So the heap always contains only the elements which have relative frequency at least $1/k$. To get the heavy hitters and their counts, we just get all the elements currently in the heap.
-
-Owl implements this data structure on top of the count-min sketch. The interface is as follows:
-
-```
-module type Sig = sig
-
- type 'a t
-
- (** Core functions *)
-
- val init : k:float -> epsilon:float -> delta:float -> 'a t
- (**
-`init k epsilon delta` initializes a sketch with threshold k, approximation
-factor epsilon, and failure probability delta.
- *)
-
- val add : 'a t -> 'a -> unit
- (** `add h x` adds value `x` to sketch `h` in-place. *)
-
- val get : 'a t -> ('a * int) list
- (**
-`get h` returns a list of all heavy-hitters in sketch `h`, as a
-(value, frequency) pair, sorted in decreasing order of frequency.
- *)
-end
-```
-
-Owl provides two implementations of the heavy-hitters data structure, as `Owl_base.HeavyHitters_sketch.Native` and `Owl_base.HeavyHitters_sketch.Owl`, using the two types of count-min sketch table. As described above, we have found the `Native` implementation to be faster.
-An example use of this data structure to find the heavy hitters in the `news.txt` corpus can be found in the [Owl examples repository](https://github.com/owlbarn/owl/blob/master/examples/countmin_texts.ml).
-
-## Summary
-
-In this chapter, we introduce several internal modules in Owl.
-First we have the dataset module that provides access to the commonly used datasets such as MNIST and CIFAR10.
-Then we also have modules that can be used to build common data structures such as graph, stack, and heap.
-One less-known but interesting data structure is the Count-Min Sketch, which is a probabilistic data structure for computing approximate counts. It is also discussed in detail in this chapter.
-These modules are not complex and may even not quite necessary in all numerical libraries, but they may come surprisingly handy when you need them.
diff --git a/book/utilities/dune b/book/utilities/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/utilities/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/utilities/dune.inc b/book/utilities/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/utilities/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/utilities/prelude.ml b/book/utilities/prelude.ml
deleted file mode 100644
index 737f02d..0000000
--- a/book/utilities/prelude.ml
+++ /dev/null
@@ -1,9 +0,0 @@
-#require "owl-top";;
-
-open Owl
-open Bigarray
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/visualisation/dune b/book/visualisation/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/visualisation/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/visualisation/dune.inc b/book/visualisation/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/visualisation/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/visualisation/prelude.ml b/book/visualisation/prelude.ml
deleted file mode 100644
index 283e8b6..0000000
--- a/book/visualisation/prelude.ml
+++ /dev/null
@@ -1,9 +0,0 @@
-#require "owl-top,owl-plplot";;
-
-open Owl
-open Owl_plplot
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/zoo/README.md b/book/zoo/README.md
deleted file mode 100644
index 3ce767d..0000000
--- a/book/zoo/README.md
+++ /dev/null
@@ -1,378 +0,0 @@
-# Scripting and Zoo System
-
-In this chapter, we introduce the Zoo system, and focus on two aspects of it.
-The first is how to use it to make "small functions", then distribute and share them with other users.
-The second is to investigate the idea of service composing and deployment based on existing script sharing function
-
-## Introduction
-
-First, we would like to introduce the background based on which we build the Zoo system.
-Currently, many popular data analytics services such as machine learning applications are deployed on cloud computing infrastructures.
-However, they require aggregating users' data at central server for processing. This architecture is prone to issues such as increased service response latency, communication cost, single point failure, and data privacy concerns.
-
-Recently computation on edge and mobile devices has gained rapid growth, such as personal data analytics in home, DNN application on a tiny stick, and semantic search and recommendation on web browser.
-Edge computing is also boosting content distribution by supporting peering and caching.
-HUAWEI has identified speed and responsiveness of native AI processing on mobile devices as the key to a new era in smartphone innovation.
-
-Many challenges arise when moving ML analytics from cloud to edge devices.
-One widely discussed challenge is the limited computation power and working memory of edge devices.
-Personalising analytics models on different edge devices is also a very interesting topic.
-However, one problem is not yet well defined and investigated: the deployment of data analytics services.
-Most existing machine learning frameworks such as TensorFlow and Caffe focus mainly on the training of analytics models.
-On the other, the end users, many of whom are not ML professionals, mainly use trained models to perform inference.
-This gap between the current ML systems and users' requirements is growing.
-
-Another challenge in conducting ML based data analytics on edge devices is model composition.
-Training a model often requires large datasets and rich computing resources, which are often not available to normal users. That's one of the reasons that they are bounded with the models and services provided by large companies.
-To this end we propose the idea *Composable Service*.
-Its basic idea is that many services can be constructed from basic ML ones such as image recognition, speech-to-text, and recommendation to meet new application requirements.
-We believe that modularity and composition will be the key to increasing usage of ML-based data analytics.
-This idea drives us to develop the Zoo system.
-
-## Share Script with Zoo
-
-The core functionality of the Zoo is simple: sharing OCaml scripts.
-It is known that we can use OCaml as a scripting language as Python (at certain performance cost because the code is compiled into bytecode). Even though compiling into native code for production use is recommended, scripting is still useful and convenient, especially for light deployment and fast prototyping. In fact, the performance penalty in most Owl scripts is almost unnoticeable because the heaviest numerical computation part is still offloaded to Owl which runs native code.
-
-While designing Owl, our goal is always to make the whole ecosystem open, flexible, and extensible. Programmers can make their own "small" scripts and share them with others conveniently, so they do not have to wait for such functions to be implemented in Owl's master branch or submit something "heavy" to OPAM.
-
-### Typical Scenario
-
-To illustrate how to use Zoo, let's start with a simple synthetic scenario. Alice is a data analyst and uses Owl in her daily job. One day, she realised that the functions she needed had not been implemented yet in Owl. Therefore, she spent an hour in her computer and implemented these functions by herself. She thought these functions might be useful to others, e.g., her colleague Bob, she decided to share these functions using Zoo System.
-Now let's see how Alice manages to do so in the following, step by step.
-
-
-### Create a Script
-
-First, Alice needs to create a folder (e.g., `myscript` folder) for her shared script. What to put in the folder then?
-She needs at least two files in this folder. The first one is of course the file (i.e., `coolmodule.ml`) implementing the function as below. The function `sqr_magic` returns the square of a magic matrix, it is quite useless in reality but serves as an example here.
-
-```shell
-#!/usr/bin/env owl
-
-open Owl
-
-let sqr_magic n = Mat.(magic n |> sqr)
-```
-
-The second file she needs is a `#readme.md` which provides a brief description of the shared script. Note that the first line of the `#readme.md` will be used as a short description for the shared scripts. This short description will be displayed when you use `owl -list` command to list all the available Zoo code snippets on your computer.
-
-```shell
-Square of Magic Matrix
-
-`Coolmodule` implements a function to generate the square of magic matrices.
-```
-
-
-### Share via Gist
-
-Second, Alice needs to distribute the files in `myscript` folder.
-The distribution is done via [Gist](https://gist.github.com/), so you must have `gist` installed on your computer. E.g., if you use Mac, you can install `gist` with `brew install gist`. Owl provides a simple command line tool to upload the Zoo code snippets. Note that you need to log into your GitHub account for `gist` and `git`.
-
-```shell
-owl -upload myscript
-```
-
-The `owl -upload` command simply uploads all the files in `myscript` as a bundle to your Gist page. The command also prints out the URL after a successful upload. In our case, you can check the updated bundle on [this page](https://gist.github.com/9f0892ab2b96f81baacd7322d73a4b08).
-
-
-### Import in Another Script
-
-The bundle Alice uploaded before is assigned a unique `id`, i.e. `9f0892ab2b96f81baacd7322d73a4b08`. In order to use the `sqr_magic` function, Bob only needs to use the `#zoo` directive in his script e.g. `bob.ml` in order to import the function.
-
-```shell
-#!/usr/bin/env owl
-#zoo "9f0892ab2b96f81baacd7322d73a4b08"
-
-let _ = Coolmodule.sqr_magic 4 |> Owl.Mat.print
-```
-
-Bob's script is very simple, but there are a couple of things worth pointing out:
-
-* Zoo system will automatically download the bundle of a given id if it is not cached locally;
-
-* All the `ml` files in the bundle will be imported as modules, so you need to use `Coolmodule.sqr_magic` to access the function.
-
-* You may also want to use `chmod +x bob.ml` to make the script executable. This is obvious if you are a heavy terminal user.
-
-Note that to use `#zoo` directive in `utop` you need to manually load the `owl-zoo` library with `#require "owl-zoo";;`. Alternatively, you can also load `owl-top` using `#require "owl-top";;` which is an OCaml toplevel wrapper of Owl.
-If you want to make `utop` load the library automatically by adding this line to `~/.ocamlinit`.
-
-
-### Select a Specific Version
-
-Alice has modified and uploaded her scripts several times. Each version of her code is assigned a unique `version id`. Different versions of code may work differently, so how could Bob specify which version to use? Good news is that, he barely needs to change his code.
-
-```shell
-
- #!/usr/bin/env owl
- #zoo "9f0892ab2b96f81baacd7322d73a4b08?vid=71261b317cd730a4dbfb0ffeded02b10fcaa5948"
-
- let _ = Coolmodule.sqr_magic 4 |> Owl.Mat.print
-
-```
-
-The only thing he needs to add is a version id using the parameter `vid`. The naming scheme of Zoo is designed to be similar with the field-value pair in a RESTful query. Version id can be obtained from a gist's [revisions page](https://gist.github.com/9f0892ab2b96f81baacd7322d73a4b08/revisions).
-
-Besides specifying a version, it is also quite possible that Bob prefers to use the newest version Alice provides, whatever its id may be. The problem here is that, how often does Bob need to contact the Gist server to retreat the version information? Every time he runs his code? Well, that may not be a good idea in many cases considering the communication overhead and response time. Zoo caches gists locally and tends to use the cached code and data rather than downloading them all the time.
-
-To solve this problem, Zoo provides another parameter in the naming scheme: `tol`. It is the threshold of a gist's *tolerance* of the time it exists on the local cache. Any gist that exists on a user's local cache for longer than `tol` seconds is deemed outdated and thus requires updating the latest `vid` information from the Gist server before being used. For example:
-
-```shell
-
- #!/usr/bin/env owl
- #zoo "9f0892ab2b96f81baacd7322d73a4b08?tol=300"
-
- let _ = Coolmodule.sqr_magic 4 |> Owl.Mat.print
-
-```
-
-By setting the `tol` parameter to 300, Bob indicates that, if Zoo has already fetched the version information of this gist from remote server within the past 300 seconds, then keep using its local cache; otherwise contact the Gist server to check if a newer version is pushed. If so, the newest version is downloaded to local cache before being used. In the case where Bob don't want to miss every single update of Alice's gist code, he can simply set `tol` to 0, which means fetching the version information every time he executes his code.
-
-The `vid` and `tol` parameters enable users to have fine-grained version control of Zoo gists. Of course, these two parameters should not be used together. When `vid` is set in a name, the `tol` parameter will be ignored. If both are not set, as shown in the previous code snippet, Zoo will use the latest locally cached version if it exists.
-
-
-### Command Line Tool
-
-You can see that the Zoo system is not complicated at all. There will be more features to be added in future. For the time being, you can check all the available options by executing `owl`.
-
-```shell
-
- $ owl
- Owl's Zoo System
-
- Usage:
- owl [utop options] [script-file] execute an Owl script
- owl -upload [gist-directory] upload code snippet to gist
- owl -download [gist-id] [ver-id] download code snippet from gist; download the latest version if ver-id not specified
- owl -remove [gist-id] remove a cached gist
- owl -update [gist-ids] update (all if not specified) gists
- owl -run [gist-id] run a self-contained gist
- owl -info [gist-ids] show the basic information of a gist
- owl -list [gist-id] list all cached versions of a gist; list all the cached gists if gist-id not specified
- owl -help print out help information
-
-```
-
-Note that both `run` and `info` commands accept a full gist name that can contain extra parameters, instead of only a gist id.
-
-
-### More Examples
-
-Despite of its simplicity, Zoo is a very flexible and powerful tool and we have been using it heavily in our daily work. We often use Zoo to share the prototype code and small shared modules which we do not want to bother OPAM, such as those used in performance tests.
-Moreover, many interesting examples are also built atop of Zoo system.
-
-* [Google Inception V3 for Image Classification](https://gist.github.com/jzstark/9428a62a31dbea75511882ab8218076f)
-
-* [Neural Style Transfer](https://gist.github.com/jzstark/6f28d54e69d1a19c1819f52c5b16c1a1)
-
-* [Fast Neural Style Transfer](https://gist.github.com/jzstark/f937ce439c8adcaea23d42753f487299)
-
-For example, you can use Zoo to perform DNN-based image classification in only 6 lines of code:
-
-```shell
-
- #!/usr/bin/env owl
- #zoo "9428a62a31dbea75511882ab8218076f"
-
- let _ =
- let image = "/path/to/your/image.png" in
- let labels = InceptionV3.infer image in
- InceptionV3.to_json ~top:5 labels
-
-```
-
-We include these examples as use cases in the Part III of this book, and will discuss them in detail there.
-
-## System Design
-
-Based on these basic functionalities, we extend the Zoo system to address the composition and deployment challenges we mention at the beginning.
-First, we would like to briefly introduce the workflow of Zoo as shown in [@fig:zoo:workflow].
-
-{width=70% #fig:zoo:workflow}
-
-### Services
-Gist is a core abstraction in Zoo. It is the centre of code sharing.
-However, to compose multiple analytics snippets, Gist alone is
-insufficient. For example, it cannot express the structure of how
-different pieces of code are composed together. Therefore, we introduce
-another abstraction: `service`.
-
-A service consists of three parts: *Gists*, *types*, and *dependency
-graph*. *Gists* is the list of Gist ids this service requires. *Types*
-is the parameter types of this service. Any service has zero or more
-input parameters and one output. This design follows that of an OCaml
-function. *Dependency graph* is a graph structure that contains
-information about how the service is composed. Each node in it
-represents a function from a Gist, and contains the Gist's name, id, and
-number of parameters of this function.
-
-Zoo provides three core operations about a service: create, compose, and
-publish. The *create\_service* creates a dictionary of services given a
-Gist id. This operation reads the service configuration file from that
-Gist, and creates a service for each function specified in the
-configuration file. The *compose\_service* provides a series of
-operations to combine multiple services into a new service. A compose
-operation does type checking by comparing the "types" field of two
-services. An error will be raised if incompatible services are composed.
-A composed service can be saved to a new Gist or be used for further
-composition. The *publish\_service* makes a service's code into such
-forms that can be readily used by end users. Zoo is designed to support
-multiple backends for these publication forms. Currently it targets
-Docker container, JavaScript, and MirageOS as backends.
-
-### Type Checking
-
-One of the most important tasks of service
-composition is to make sure the type matches. For example, suppose there
-is an image analytics service that takes a PNG format image, and if we
-connect to it another one that produces a JPEG image, the resulting
-service will only generate meaningless output for data type mismatch.
-OCaml provides primary types such as integer, float, string, and bool.
-The core data structure of Owl is ndarray (or tensor as it is called in
-some other data analytics frameworks). However, all these types are
-insufficient for high level service type checking as mentioned. That
-motives us to derive richer high-level types.
-
-To support it, we use generalised algebraic data types (GADTs) in OCaml.
-There already exist several model collections on different platforms,
-e.g. Caffe and MxNet. We observe that
-most current popular deep learning (DL) models can generally be
-categorised into three fundamental types: `image`, `text`, and `voice`.
-Based on them, we define sub-types for each: PNG and JPEG image, French
-and English text and voice, i.e. `png img`, `jpeg img`, `fr text`,
-`en text`, `fr voice`, and `en voice` types. More can be further added
-easily in Zoo. Therefore type checking in OCaml ensures type-safe and
-meaningful composition of high level services.
-
-### Backend
-
-Recognising the heterogeneity of edge device deployment, one key
-principle of Zoo is to support multiple deployment methods.
-Containerisation as a lightweight virtualisation technology has gained
-enormous traction. It is used in deployment systems such as Kubernetes.
-Zoo supports deploying services as Docker containers. Each container
-provides RESTful API for end users to query.
-
-Another backend is JavaScript. Using JavaScript to do analytics aside
-from front end development begins to attract interests from
-academia and industry, such as Tensorflow.js and
-Facebook's Reason language. By exporting OCaml and Owl functions to
-JavaScript code, users can do complex data analytics on web browser
-directly without relying on any other dependencies.
-
-Aside from these two backends, we also initially explore using MirageOS
-as an option. Mirage is an example of Unikernel, which builds tiny
-virtual machines with a specialised minimal OS that host only one target
-application. Deploying to Unikernel is proved to be of low memory
-footprint, and thus quite suitable for resource-limited edge devices.
-
-### Domain Specific Language
-
-Based on the basic functionalities, Zoo aims to provide a minimal DSL for service composition and deployment.
-
-**Composition**:
-
-To acquire services from a Gist of id *gid*, we use $\$gid$ to create a
-dictionary, which maps from service name strings to services. We
-implement the dictionary data structure using `Hashtbl` in OCaml. The
-$\#$ operator is overloaded to represent the "get item" operation.
-Therefore, $$\$\textrm{gid} \# \textrm{sname}$$ can be used to get a
-service that is named "sname". Now suppose we have $n$ services: $f_1$,
-$f_2$, ..., $f_n$. Their outputs are of type $t_{f1}$, $t_{f2}$, ...,
-$t_{fn}$. Each service $s$ accepts $m_s$ input parameters, which have
-type $t_s^1$, $t_s^2$, ..., $t_s^{m_s}$. Also, there is a service $g$
-that takes $n$ inputs, each of them has type $t_g^1$, $t_g^2$, ...,
-$t_g^n$. Its output type is $t_o$. Here Zoo provides the `$>` operator
-to compose a list of services with another:
-$$[f_1, f_2, \ldots, f_n] \textrm{\$>} g$$ This operation returns a new
-service that has $\sum_{s=1}^{n} m_s$ inputs, and is of output type
-$t_o$. This operation does type checking to make sure that
-$t_{fi} = t_g^i, \forall i \in {1, 2, \ldots, n}$.
-
-**Deployment**:
-
-Taking a service $s$, be it a basic or composed one, it can be deployed
-using the following syntax:
-
-$$s \textrm{\$@ backend}$$
-
-The `$@` operator publish services to certain backend. It returns a
-string of URI of the resources to be deployed.
-
-Note that the `$>` operator leads to a tree-structure, which is in most
-cases sufficient for our real-world service deployment. However, a more
-general operation is to support graph structure. This will be our
-next-step work.
-
-### Service Discovery
-
-The services require a service discovery mechanism. For simplicity's
-sake, each newly published service is added to a public record hosted on
-a server. The record is a list of items, and each item contains the Gist
-id that service based on, a one-line description of this service, string
-representation of the input types and output type of this service, e.g.
-"image -\> int -\> string -\> tex", and service URI. For the container
-deployment, the URI is a DockerHub link, and for JavaScript backend, the
-URI is a URL link to the JavaScript file itself. The service discovery
-mechanism is implemented using off-the-shelf database.
-
-### Use Case
-
-To illustrate the workflow above, let's consider another synthetic scenario.
-Alice is a French data analyst. She knows how to use ML and DL models in
-existing platforms, but is not an expert. Her recent work is about
-testing the performance of different image classification neural
-networks. To do that, she needs to first modify the image using the
-DNN-based Neural Style Transfer (NST) algorithm. The NST algorithm takes
-two images and outputs to a new image, which is similar to the first
-image in content and the second in style. This new image should be
-passed to an image classification DNN for inference. Finally, the
-classification result should be translated to French. She does not want
-to put academic-related information on Google's server, but she cannot
-find any single pre-trained model that performs this series of tasks.
-
-Here comes the Zoo system to help. Alice finds gists that can do image
-recognition, NST, and translation separately. Even better, she can
-perform image segmentation to greatly improve the performance of
-NST using another Gist. All she has to provide is some
-simple code to generate the style images she need to use. She can then
-assemble these parts together easily using Zoo.
-
-```text
-open Zoo
-(* Image classification *)
-let s_img = $ "aa36e" # "infer";;
-(* Image segmentation *)
-let s_seg = $ "d79e9" # "seg";;
-(* Neural style transfer *)
-let s_nst = $ "6f28d" # "run";;
-(* Translation from English to French *)
-let s_trans = $ "7f32a" # "trans";;
-(* Alice's own style image generation service *)
-let s_style = $ alice_Gist_id # "image_gen";;
-
-(* Compose services *)
-let s = [s_seg; s_style] $> s_nst
- $> n_img $> n_trans;;
-(* Publish to a new Docker Image *)
-let pub = (List.hd s) $@
- (CONTAINER "alice/image_service:latest");;
-```
-
-Note that the Gist id used in the code is shorted from 32 digits to 5
-due to column length limit. Once Alice creates the new service and
-published it as a container, she can then run it locally and send
-request with image data to the deployed machine, and get image
-classification results back in French.
-
-## Summary
-
-The Zoo system was first developed as a handy tool for sharing OCaml scripts. This chapter introduces how it works with a step-by-step example.
-Based on its basic functionalities, we propose to use it to solve two challenges when conducting data analytics on edge: service composition and deployment.
-Zoo provides a simple DSL to enable easy and type-safe composition of different advanced services.
-We present a use case to show the expressiveness of the code.
-Zoo can further be combined with multiple execution backends to accommodate the heterogeneous edge deployment environment. The compiler backends will be discussed in the next chapter.
-Part of the content in this chapter is adapted from our paper [@zhao2018data]. We refer the readers to it for more detail if you are interested.
-
-## References
diff --git a/book/zoo/dune b/book/zoo/dune
deleted file mode 100644
index b70b36e..0000000
--- a/book/zoo/dune
+++ /dev/null
@@ -1,12 +0,0 @@
-(rule
- (target dune.gen)
- (action
- (with-stdout-to %{target}
- (run ocaml-mdx rule --prelude=%{dep:prelude.ml} %{dep:README.md}))))
-
-(alias
- (name runtest)
- (deps README.md)
- (action (diff dune.inc dune.gen)))
-
-(include dune.inc)
diff --git a/book/zoo/dune.inc b/book/zoo/dune.inc
deleted file mode 100644
index efe32dc..0000000
--- a/book/zoo/dune.inc
+++ /dev/null
@@ -1,9 +0,0 @@
-(alias
- (name runtest)
- (deps
- (:x README.md)
- prelude.ml)
- (action
- (progn
- (run ocaml-mdx test --prelude=prelude.ml %{x})
- (diff? %{x} %{x}.corrected))))
diff --git a/book/zoo/prelude.ml b/book/zoo/prelude.ml
deleted file mode 100644
index 737f02d..0000000
--- a/book/zoo/prelude.ml
+++ /dev/null
@@ -1,9 +0,0 @@
-#require "owl-top";;
-
-open Owl
-open Bigarray
-
-let () = Printexc.record_backtrace false
-let () =
- Owl_base_stats_prng.init 89;
- Owl_stats_prng.init 89
\ No newline at end of file
diff --git a/book/algodiff/README.md b/chapters/algodiff.md
similarity index 99%
rename from book/algodiff/README.md
rename to chapters/algodiff.md
index 2deecce..1ac3164 100644
--- a/book/algodiff/README.md
+++ b/chapters/algodiff.md
@@ -1,3 +1,7 @@
+---
+layout: default
+---
+
# Algorithmic Differentiation
In science and engineering it is often necessary to study the relationship between two or more quantities, where changing of one quantity leads to changes of others.
@@ -177,7 +181,7 @@ The nodes between them indicate constants or intermediate variables that are got
All nodes are labelled by $v_i$.
An edge between two nodes represents an explicit dependency in the computation.
-{ width=100% #fig:algodiff:example_01}
+{ width=100% #fig:algodiff:example_01}
Based on this graphic representation, there are two major ways to apply the chain rules: the forward differentiation mode, and the reverse differentiation mode (not "backward differentiation", which is a method used for solving ordinary differential equations).
Next, we introduce these two methods.
@@ -229,7 +233,7 @@ Step Primal computation Tangent computation
This procedure shown in this table can be illustrated in [@fig:algodiff:example_01_forward].
-{ width=100% #fig:algodiff:example_01_forward}
+{ width=100% #fig:algodiff:example_01_forward}
Of course, all the numerical computations here are approximated with only two significant figures. We can validate this result with algorithmic differentiation module in Owl. If you don't understand the code, don't worry. We will cover the details of this module in later sections.
@@ -346,7 +350,7 @@ Therefore, we compute the adjoint of $v_0$ with regard to $v_2$ (step 19) and $v
Similar to the forward mode, reverse differentiation process in [] can be clearly shown in figure [@fig:algodiff:example_01_reverse].
-{ width=100% #fig:algodiff:example_01_reverse}
+{ width=100% #fig:algodiff:example_01_reverse}
This result $\bar{v_0} = -0.18$ agrees what we have have gotten using the forward mode.
However, if you still need another fold of insurance, we can use Owl to perform a numerical differentiation.
@@ -1153,7 +1157,7 @@ Plot.plot ~h x y4;
Plot.output h;;
```
-{ width=70% #fig:algodiff:plot00 }
+{ width=70% #fig:algodiff:plot00 }
If you want, you can play with other functions, such as $\frac{1-e^{-x}}{1+e^{-x}}$ to see what its derivatives look like.
@@ -1330,7 +1334,7 @@ It turns out that, the simple implementations we have are not very far away from
There are of course many details that need to be taken care of in Owl, but by now you should be able to understand the gist of it.
Without digging too deep into the code details, in this section we give an overview of some of the key differences between the Owl implementation and the simple version we built in the previous sections.
-{width=60% #fig:algodiff:architecture}
+{width=60% #fig:algodiff:architecture}
The [@fig:algodiff:architecture] shows the structure of AD module in Owl, and they will be introduced one by one below.
diff --git a/book/convention/README.md b/chapters/convention.md
similarity index 99%
rename from book/convention/README.md
rename to chapters/convention.md
index a852733..d61a20d 100644
--- a/book/convention/README.md
+++ b/chapters/convention.md
@@ -1,3 +1,6 @@
+---
+layout: page
+---
# Conventions
Every software system has its own rules and conventions which require the developers to comply with. Owl is not an exception, for example the [rules on broadcasting operation](broadcast.html) and the [conventions on slice definition](slicing.html). In this chapter, I will cover the function naming and various conventions in Owl.
diff --git a/book/dataframe/README.md b/chapters/dataframe.md
similarity index 99%
rename from book/dataframe/README.md
rename to chapters/dataframe.md
index 2bf634e..2b812af 100644
--- a/book/dataframe/README.md
+++ b/chapters/dataframe.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Dataframe for Tabular Data
diff --git a/book/diffequation/README.md b/chapters/diffequation.md
similarity index 99%
rename from book/diffequation/README.md
rename to chapters/diffequation.md
index 0c668f2..b4747ec 100644
--- a/book/diffequation/README.md
+++ b/chapters/diffequation.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Ordinary Differential Equations
A *differential equation* is an equation that contains a function and one or more of its derivatives.
diff --git a/book/introduction/README.md b/chapters/introduction.md
similarity index 95%
rename from book/introduction/README.md
rename to chapters/introduction.md
index 5fc2afd..67d009b 100644
--- a/book/introduction/README.md
+++ b/chapters/introduction.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Introduction
This chapter briefly introduces the outline of the whole book, targeted audience, how to use the book, and then the installation of Owl.
@@ -256,7 +260,7 @@ At this point, a complete Owl environment is set up in the Jupyter Notebook, and
For example, you can simply copy & paste the whole [lazy_mnist.ml](https://github.com/owlbarn/owl/blob/master/examples/lazy_mnist.ml) to train a convolutional neural network in the notebook. But here, let us just use the following code.
-```ocaml env=intro_00
+```ocaml
# #use "topfind"
# #require "owl-top, jupyter.notebook"
@@ -279,7 +283,7 @@ val make_network : int array -> network =
The `make_network` function defines the structure of a convolution neural network. By passing the shape of input data, Owl automatically infers the shape of whole network, and prints out the summary of network structure nicely on the screen.
-```ocaml env=intro_00
+```ocaml
# make_network [|28;28;1|]
- : network =
18839
@@ -348,7 +352,7 @@ The `make_network` function defines the structure of a convolution neural networ
The Second example demonstrates how to plot figures in notebook. Because Owl's Plot module does not support in-memory plotting, the figure needs to be written into a file first before passing to `Jupyter_notebook.display_file` to render.
-```ocaml env=intro_01
+```ocaml
# #use "topfind"
# #require "owl-top, owl-plplot, jupyter.notebook"
@@ -373,7 +377,7 @@ To load the image into browser, we need to call the `Jupyter_notebook.display_fi
Jupyter_notebook.display_file ~base64:true "image/png" "plot_00.png"
```
-{ width=90% #fig:introduction:example00}
+{ width=90% #fig:introduction:example00}
Even though the extra call to `display_file` is not ideal, it is obvious that the tooling in OCaml ecosystem has been moving forward quickly. I believe we will soon have even better and more convenient tools for interactive data analytical applications.
@@ -401,17 +405,6 @@ For the time being, if you want to save that extra line to display a image in Ju
```
-{ width=90% #fig:introduction:plot01 }
-
-From the example above, you can see Owl users' experience can be significantly improved by using the notebook.
-
-
-## Summary
-
-In this chapter we give an brief introduction to the background of Owl, including scientific computing, functional programming, and target audience, and the layout of this book.
-Then we start introduces how Owl can be installed and used, as a first step to start this journey.
-You can feel free to browse any part of this book as you want.
+{ width=90% #fig:introduction:plot01 }
-At this point you have installed a working environment of Owl on your computer, you should feel really proud of yourself.
-To be honest, this can be the most challengening part for a new user, even though Owl team has spent tons of time in improving its compilation and intallation.
-Now, let's roll out and start the exploration of more interesting topics.
+From the example above, you can see Owl users' experience can be significantly improved by using the notebook.
\ No newline at end of file
diff --git a/book/linear-algebra/README.md b/chapters/linalg.md
similarity index 99%
rename from book/linear-algebra/README.md
rename to chapters/linalg.md
index 26dacbe..7c6bd91 100644
--- a/book/linear-algebra/README.md
+++ b/chapters/linalg.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Linear Algebra
Linear Algebra is a key mathematics field behind computer science and numerical computating.
diff --git a/book/maths/README.md b/chapters/maths.md
similarity index 97%
rename from book/maths/README.md
rename to chapters/maths.md
index ba5fdc8..5aaee73 100644
--- a/book/maths/README.md
+++ b/chapters/maths.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Mathematical Functions
Staring from this chapter, we begin our journey to explore the world of numerical computing with Owl.
@@ -155,7 +159,7 @@ Here the $B_n$ is the $n$th [Bernoulli number](https://en.wikipedia.org/wiki/Ber
The [@fig:algodiff:trio] shows the relationship between these trigonometric functions. This figure is inspired by a [wiki post](https://zh.wikipedia.org/wiki/%E5%8F%8C%E6%9B%B2%E5%87%BD%E6%95%B0).
These functions also have corresponding inverse functions: `asin`, `acos`, `atan`, `acot`, `asec`, `acsc`. For example, if $\sin(a) = b$, then $\textrm{asin}(b) = a$.
-{width=60% #fig:algodiff:trio}
+{width=60% #fig:algodiff:trio}
Another related idea is the *Hyperbolic functions* such as `sinh` and `cosh`.
These functions are defined using exponential functions.
@@ -174,7 +178,7 @@ These functions in Owl are shown below:
Similarly, each of these functions has a corresponding inverse functions: `asinh`, `acosh`, `atanh`, `acoth`, `asech`, `acsch`.
The relationship between these hyperbolic trigonometric functions are clearly depicted in [@fig:algodiff:hyper_trio].
-{width=70% #fig:algodiff:hyper_trio}
+{width=70% #fig:algodiff:hyper_trio}
Besides these functions, there are also some related functions.
`sinc` returns $\sin(x)/x$ and 1 for $x=0$.
@@ -238,7 +242,7 @@ let _ =
Plot.output h
```
-{width=60% #fig:algodiff:airy}
+{width=60% #fig:algodiff:airy}
### Bessel Functions
@@ -312,7 +316,7 @@ let _ =
Plot.output h
```
-{width=60% #fig:algodiff:bessel}
+{width=60% #fig:algodiff:bessel}
### Elliptic Functions
@@ -411,7 +415,7 @@ let _ =
Plot.output h
```
-{width=60% #fig:algodiff:gamma}
+{width=60% #fig:algodiff:gamma}
### Beta Functions
@@ -474,7 +478,7 @@ let _ =
Plot.output h
```
-{width=60% #fig:algodiff:struve}
+{width=60% #fig:algodiff:struve}
### Zeta Functions
@@ -532,7 +536,7 @@ let _ =
Plot.output h
```
-{width=75% #fig:algodiff:erf}
+{width=75% #fig:algodiff:erf}
### Integral Functions
@@ -562,7 +566,7 @@ let _ =
Plot.output h
```
-{width=100% #fig:algodiff:integrals}
+{width=100% #fig:algodiff:integrals}
Besides these two, several other type of special integral functions are also provided. The full list is shown in [@tbl:maths:integral].
@@ -700,7 +704,7 @@ let _ =
Plot.output h
```
-{width=60% #fig:maths:interp}
+{width=60% #fig:maths:interp}
## Integration
diff --git a/book/ndarray/README.md b/chapters/ndarray.md
similarity index 99%
rename from book/ndarray/README.md
rename to chapters/ndarray.md
index 91ae4d1..d82b8c5 100644
--- a/book/ndarray/README.md
+++ b/chapters/ndarray.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# N-Dimensional Arrays
diff --git a/book/neural-network/README.md b/chapters/neural-network.md
similarity index 97%
rename from book/neural-network/README.md
rename to chapters/neural-network.md
index e6a5cf9..29af8fe 100644
--- a/book/neural-network/README.md
+++ b/chapters/neural-network.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Deep Neural Networks
The Neural Network has been a hot research topic and widely used in engineering and social life.
@@ -58,7 +62,7 @@ The starting example is also inspired by the Machine Learning course by Andrew N
In logistic regression we have multiple parameters as one layer to decide if the input data belongs to one type or the other, as shown in [@fig:neural-network:simple_nn](a).
Now we need to extend it towards multiple classes, with a new hidden layer.
-{width=100% #fig:neural-network:simple_nn}
+{width=100% #fig:neural-network:simple_nn}
The data we will use is from [MNIST dataset](http://yann.lecun.com/exdb/mnist/). You can use `Owl.Dataset.download_all()` to download the dataset.
@@ -88,7 +92,7 @@ val y : Owl_dense_matrix.S.mat =
It shows the first three labels are 5, 0, and 4.
-{width=60% #fig:neural-network:mnist}
+{width=60% #fig:neural-network:mnist}
### Forward Propagation
@@ -242,7 +246,7 @@ $$
$$
-{width=100% #fig:neural-network:activations}
+{width=100% #fig:neural-network:activations}
And there is the `softmax` function.
It takes a vector of $K$ real numbers, and normalizes it into a probability distribution consisting of $K$ probabilities proportional to the exponentials of the input numbers:
@@ -374,7 +378,7 @@ When the training starts, our application keeps printing the value of loss funct
After the training is finished, we test the accuracy of the network. Here is one example where we input hand-written 3. The vector below shows the prediction. The model says with $90.14%$ chance it is a number 3, which is quite accurate.
-{ width=60% #fig:neural-network:plot01 }
+{ width=60% #fig:neural-network:plot01 }
## Neural Network Module
@@ -394,7 +398,7 @@ We were sure we could implement a proper neural network framework atop of Owl, b
The outcome is wonderful. It turns out with Owl's architecture and its internal functionality (algodiff, optimisation, etc.), combined with OCaml's powerful module system, implementing a full featured neural network module only requires approximately 3500 LOC. Yes, you heard me, 3500 LOC, and it reach TensorFlow's level of performance on CPU (by the time we measured in 2018).
-{width=50% #fig:neural-network:modules}
+{width=50% #fig:neural-network:modules}
To understand how we do that, let's look at [@fig:neural-network:modules].
It shows the basic module architecture of the neural network module.
@@ -737,13 +741,13 @@ The basic structure of RNN is quite simple: it is a neural network with loops, a
In this way, the information from previous data in the sequence is kept.
-{width=80% #fig:neural-network:rnn-unrolled}
+{width=80% #fig:neural-network:rnn-unrolled}
As shown in [@fig:neural-network:rnn-unrolled], a RNN can actually be unrolled into a chain of multiple connected neural networks.
Here the $x_i$'s are sequential input, and the $h_i$'s are the *hidden status*, or output of the RNN.
The function of RNN therefore mainly relies on the processing logic in $A$.
-{width=80% #fig:neural-network:rnn-unit}
+{width=80% #fig:neural-network:rnn-unit}
In a vanilla recurrent neural network, the function can be really simple and familiar:
@@ -767,7 +771,7 @@ We still need to pass in the output from previous loop, but instead of take it a
1) what to forget, 2) what to remember, and 3) what to output.
In this way, the useful information from previous data can be kept longer and the RNN would then have a "longer memory".
-{width=80% #fig:neural-network:lstm}
+{width=80% #fig:neural-network:lstm}
Let's see how it achieves this effect.
The process unit of LSTM is shown in [@fig:neural-network:lstm].
@@ -816,7 +820,7 @@ The LSTM has been refined in later work since its proposal.
There are many variants of it, and one of them is the *Gated Recurrent Unit* (GRU) which is proposed by Cho, et al. in 2014.
Its processing unit is shown in [@fig:neural-network:gru].
-{width=50% #fig:neural-network:gru}
+{width=50% #fig:neural-network:gru}
Compared to LSTM, the GRU consists of two parts.
The first is a "reset gate" that decides how much information to forget from the past, and the "update gate" behaves like a combination of LSTM's forget and input gate.
diff --git a/book/optimisation/README.md b/chapters/optimisation.md
similarity index 98%
rename from book/optimisation/README.md
rename to chapters/optimisation.md
index 4aabdcd..2a4380e 100644
--- a/book/optimisation/README.md
+++ b/chapters/optimisation.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Optimisation
Optimisation is one of the fundamental functionality in numerical computation.
@@ -172,7 +176,7 @@ let _ =
Plot.output h
```
-{width=90% #fig:optimisation:hump}
+{width=90% #fig:optimisation:hump}
And then you can find the extreme values using the root finding algorithm, such as Brent's:
@@ -236,7 +240,7 @@ From a starting point, the simplex move downwards step by step. At each step, th
Repeat this process until it reaches a "valley", where the method "contracts itself in the transverse direction and tries to ooze down the valley".
This three different methods are illustrated in [@fig:optimisation:simplex], where there are two variables and the simplex is a triangle.
-{width=100% #fig:optimisation:simplex}
+{width=100% #fig:optimisation:simplex}
There are some other method that does not rely on computing gradients such as Powell's method.
If the function is kind of smooth, this method can find the direction in going downhill, but instead of computing gradient, it relies on a one-dimensional optimisation method to do that, and therefore faster than the simplex method.
@@ -248,7 +252,7 @@ A *descent method* is an iterative optimisation process.
The idea is to start from an initial value, and then find a certain *search direction* along a function to decrease the value by certain *step size* until it converges to a local minimum.
This process can be illustrated in [@fig:optimisation:gradient].
-{width=60% #fig:optimisation:gradient}
+{width=60% #fig:optimisation:gradient}
Therefore, we can describe the $n$-th iteration of descent method as:
@@ -336,7 +340,7 @@ We first create a mesh grid based on the Rosenbrock function to visualise the 3D
The visualisation results are shown in [@fig:optimisation:gd_rosenbrock].
On the right figure the black line shows the moving trajectory. You can see how it moves downwards along the slope in the right side figure.
-{width=100% #fig:optimisation:gd_rosenbrock}
+{width=100% #fig:optimisation:gd_rosenbrock}
Optimisation lays at the foundation of machine learning and neural network training.
In the `Owl.Optimise` module, we provide a `minimise_fun` function to perform this task.
@@ -390,7 +394,7 @@ The *Conjugate Gradient* method can solve this problem.
It was first proposed by Hestenes and Stiefel in their work "Methods of Conjugate Gradients for Solving Linear Systems" in 1952.
It is similar to the gradient descent, but at each step, the new direction does not totally follow the new gradient, but somehow *conjugated* to the old gradients and to all previous directions traversed.
-{width=60% #fig:optimisation:gradients}
+{width=60% #fig:optimisation:gradients}
For example, [@fig:optimisation:gradients] compares the different descent efficiency of the conjugate gradient with gradient descent.
Both methods start from the same position and go for the same direction.
diff --git a/book/regression/README.md b/chapters/regression.md
similarity index 96%
rename from book/regression/README.md
rename to chapters/regression.md
index 4dd3c5e..7880c5d 100644
--- a/book/regression/README.md
+++ b/chapters/regression.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Regression
Regression is an important topic in statistical modelling and machine learning.
@@ -62,7 +66,7 @@ let plot_data x y =
Plot.output h
```
-{width=50% #fig:regression:regdata}
+{width=50% #fig:regression:regdata}
The visualisation result is shown in [@fig:regression:regdata].
As can be expected, there is a clear trend that larger population and larger profit are co-related with each other. But precisely how?
@@ -82,7 +86,7 @@ The $\theta_0$ and $\theta_1$ are the parameters of this model. Mathematically t
We can now choose randomly these parameters and see how the result works, and some of these guesses are just bad intuitively, as shown in [@fig:regression:reg_options].
Our target is to choose suitable parameters so that the line is *close* to data we observed.
-{width=100% #fig:regression:reg_options}
+{width=100% #fig:regression:reg_options}
How do we define the line being "close" to the observed data then?
One frequently used method is to use the *ordinary least square* to minimise the sum of squared distances between the data and line.
@@ -133,7 +137,7 @@ In [@fig:regression:cost] we can see that cost function varies with parameters $
The minimum point lies at somewhere at the bottom of the "valley".
It is thus natural to recall the gradient descent we have introduced in the previous chapter, and use it to find the minimal point in this bowl-shape surface.
-{width=100% #fig:regression:cost}
+{width=100% #fig:regression:cost}
Recall from previous chapter that gradient descent works by starting at one point on the surface, and move in the *direction* of steepest descent at some *step size*, then gradually approach to a local minimum, hopefully as fast as possible.
Let's use a fixed step size $\alpha$, and the direction at certain point on the surface can be obtained by using partial derivative on the surface.
@@ -171,7 +175,7 @@ By executing the code, we can get a pair of parameters: $\theta_0 = 5.14$ and $\
To check if they indeed are suitable parameters, we can visualise them against the input data.
The resulting figure [@fig:regression:reg_gd] shows a line that aligns with input data quite nicely.
-{width=60% #fig:regression:reg_gd}
+{width=60% #fig:regression:reg_gd}
Of course, there is no need to use to manually solve a linear regression problem in Owl.
It has already provided high-level regression functions.
@@ -217,7 +221,7 @@ let t1_sol () =
Plot.output h
```
-{ width=60% #fig:linear-algebra:plot_00}
+{ width=60% #fig:linear-algebra:plot_00}
Of course, since the process of finding suitable parameters can be performed using gradient descent methods, another approach to the regression problem is from the perspective of function optimisation instead of regression.
We can use the gradient descent optimisation methods introduced in the Optimisation chapter, and apply them directly on the cost function [@eq:regression:eq02].
@@ -351,7 +355,7 @@ val data' : (float, Bigarray.float64_elt) Owl_dense_ndarray_generic.t =
Another benefit of performing data normalisation is to accelerate gradient descent. The illustration in [@fig:regression:normalisation] shows the point.
We have already seen that, in a "slim" slope, the Gradient Descent, which always trying to find the steepest downward path, may perform bad. Normalisation can reshape the slope to a more proper shape.
-{width=90% #fig:regression:normalisation}
+{width=90% #fig:regression:normalisation}
Normalisation is not only used in regression, but also may other data analysis and machine learning tasks.
For example, in computer vision tasks, an image is represented as an ndarray with three dimensions. Each element represents a pixel in the image, with a value between 0 and 255.
@@ -423,7 +427,7 @@ let f ?(csv_file="boston.csv") () =
lstat, medv
```
-{width=60% #fig:regression:boston}
+{width=60% #fig:regression:boston}
We can then visualise the data to see the trend clearly.
As [@fig:regression:boston] shows, the relationship basically follows a convex curve.
@@ -470,7 +474,7 @@ $$f(x) = 42.8 - 2.3x + 0.04x^2 + \epsilon$$
We can visualise this model to see how well it fits the data:
-{width=60% #fig:regression:reg_poly.png}
+{width=60% #fig:regression:reg_poly.png}
## [Regularisation](#regularisation)
@@ -491,7 +495,7 @@ we can get the new model:
$$f(x) = 63 - 10.4x + 0.9x^2 -0.03x^3 + 0.0004x^4.$$
-{width=60% #fig:regression:poly4s}
+{width=60% #fig:regression:poly4s}
This model could be visualised as in [@fig:regression:poly4s].
Apparently, this model fits too closely with the given data, even the outliers. Therefore, this model does not make a good prediction for future output values.
@@ -540,7 +544,7 @@ It utilises the optimisation parameter module, which will be explained in detail
For now, just know that the key point is to use the L2-norm function as regularisation method.
By using this regularised version of polynomial regression, we can have an updated model as shown in [@fig:regression:poly4s_reg].
-{width=60% #fig:regression:poly4s_reg}
+{width=60% #fig:regression:poly4s_reg}
Here we choose the alpha parameter to be 20.
We can see that by using regularisation the model is less prone to the over-fitting problem, compared to [@fig:regression:poly4s].
@@ -583,7 +587,7 @@ As a naive solution, we can still try to continue using linear regression, and t
But one problem is that, the prediction value could well be out of the bounds of [0, 1]. Then maybe we need some way to normalise the result to this range?
The solution is to use the sigmoid function (or logistic function): $\sigma~(x) = \frac{1}{1 + e^{-x}}$.
-{width=60% #fig:regression:sigmoid}
+{width=60% #fig:regression:sigmoid}
As shown in [@fig:regression:sigmoid], this function projects value within the range of [0, 1].
Applying this function on the returned value of a regression, we can get a model that returns value within [0, 1].
@@ -743,7 +747,7 @@ The code above visualises the data, two types of points showing the negative and
The result is shown in [@fig:regression:logistic].
There are some wrong categorisations, but you can see that this model works well for most the data points.
-{width=60% #fig:regression:logistic}
+{width=60% #fig:regression:logistic}
Of course, we can use more than linear model within the sigmoid function.
for example, we can use to set the model as $h_{\boldsymbol{\theta}}(x) = \sigma(\theta_0 + \theta_1~x + \theta_2~x^2)$.
@@ -786,7 +790,7 @@ $$J_{\boldsymbol{\theta}}(\boldsymbol{x}, \boldsymbol{y}) = \frac{1}{m}\sum_{i=1
Function $g_0()$ and $g_1()$ are simplification of the logarithm function:
-{width=100% #fig:regression:svm_cost}
+{width=100% #fig:regression:svm_cost}
Here $f_0(x) = -\log(\sigma(x))$ is what is used in the cost function of the logistic regression. This computation-heavy logarithm is replaced with $g_0(x)$, a simple segmented function.
Similarly, $f_1(x) = -\log(1-\sigma(x))$ is replaced by $g_1(x)$.
@@ -794,7 +798,7 @@ Similarly, $f_1(x) = -\log(1-\sigma(x))$ is replaced by $g_1(x)$.
Also, another difference is that a regularisation item is added to the cost function in [@eq:regression:svm_cost].
Therefore, considering the properties of $g_0(x)$ and $g_1(x)$, by minimising this function, we are actually seeking parameters set $\boldsymbol{\theta}$ to minimise $\sum_{j=1}^{m}\theta_j^2$, with the limitation that $\boldsymbol{\theta}^Tx > 1$ when $y=1$, or $\boldsymbol{\theta}^Tx < -1$ when $y=0$.
-{width=50% #fig:regression:svm_margin}
+{width=50% #fig:regression:svm_margin}
It turns out that, by solving this optimisation problem, SVM tends to get a *large margin* between different categories of data points.
One example is shown in [@fig:regression:svm_margin].
@@ -836,7 +840,7 @@ The contour graph on the right then shows clearly how this model lead to a predi
That's the boundary we use to decide if a point is positive (close to $p_1$ or $p_3$) or negative.
You can imagine how this non-linear boundary can be changed with new parameters.
-{width=100% #fig:regression:svm_kernel}
+{width=100% #fig:regression:svm_kernel}
Only three reference points is normally not enough to support a complex non-linear boundary.
In fact, one common practice is to use all the training data, each as one point, as the reference points.
@@ -873,7 +877,7 @@ That means the hypothesis function $\theta^Tx$ we have is: $f(x)=5.7-0.43x_1-0.9
If $f(x)>0$, the categorisation result is positive, otherwise it's negative.
We can visualise this boundary line by setting $f(x)=0$, as shown in [@fig:regression:svm]. Here the `y` axis is $x_2$, and `x` axis is $x_1$.
-{width=60% #fig:regression:svm}
+{width=60% #fig:regression:svm}
## Model error and selection
diff --git a/book/signal/README.md b/chapters/signal.md
similarity index 96%
rename from book/signal/README.md
rename to chapters/signal.md
index a5c4d17..0b3d5bc 100644
--- a/book/signal/README.md
+++ b/chapters/signal.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Signal Processing
We rely on signals such as sound and images to convey information.
@@ -212,7 +216,7 @@ R 5.01874 5.02228 5.03294 5.05081 5.07604 ... 5.10886 5.07604 5.05081 5.03294 5.
- : unit = ()
```
-{.align-center width=70%}
+{.align-center width=70%}
Next let's see `rfft` and `irfft`.
Function `rfft` calculates the FFT of a real signal input and generates the complex number FFT coefficients for half of the frequency domain range.
@@ -321,7 +325,7 @@ let plot_sunspot x y =
Plot.output h
```
-{width=60% #fig:signal:sunspot}
+{width=60% #fig:signal:sunspot}
We can see there is a cycle of about 10 years, but exactly how long is it? Let's start by applying the FFT on this signal.
To process the data, we first remove the first element of the frequency vector `y'`, since it stores the sum of the data.
@@ -362,7 +366,7 @@ let plot_sunspot_freq p =
The result is shown in [@fig:signal:freq].
Now we can see clearly that the most prominent cycle is a little bit less than 11 years.
-{width=100% #fig:signal:freq}
+{width=100% #fig:signal:freq}
### Decipher the Tone
@@ -401,7 +405,7 @@ let plot_tone data filename =
The result is shown in [@fig:signal:tone](a).
Apparently, according to the dense area in this signal, there are 11 digits in this phone number. The question is: which numbers?
-{width=100% #fig:signal:tone}
+{width=100% #fig:signal:tone}
This is a suitable question for FFT.
Let's start by applying the FFT to the original data.
@@ -433,7 +437,7 @@ Let's get a subset of the signal:
let data2 = Arr.get_slice [[];[0; 4999]] data
```
-{width=100% #fig:signal:tone2}
+{width=100% #fig:signal:tone2}
And then perform the same process as before, the results are shown in [@fig:signal:tone2].
@@ -451,7 +455,7 @@ The basic idea is similar: many Fourier frequencies in the image are small and c
As input, we use the noised version of the moon landing image([src](https://imgur.com/gallery/MHcHVmX)), as shown in [@fig:signal:moonlanding].
-{width=40% #fig:signal:moonlanding}
+{width=40% #fig:signal:moonlanding}
As a tool for image processing, we use the [imageUtils.ml](https://gist.github.com/jzstark/f93177fcb0ab843e82d2c6b83880d873) script. It can be used for reading images of PPM format into ndarray, or saving ndarray into PPM image. You can copy this script to local directory.
@@ -515,7 +519,7 @@ let _ = save_ppm_from_arr image "moonlanding_denoise.ppm"
As can be seen in [@fig:signal:moonlanding_denoise], though a bit blur, the output image remove the noise in the original image, and manage to keep most of the information in it.
-{width=40% #fig:signal:moonlanding_denoise}
+{width=40% #fig:signal:moonlanding_denoise}
## Filtering
@@ -580,7 +584,7 @@ let plot_goog data y y' =
Plot.output h
```
-{width=60% #fig:signal:goog}
+{width=60% #fig:signal:goog}
The results are shown in [@fig:signal:goog].
The blue dotted line smooths the jagged original stock price line, which represents a general trend of the price.
@@ -613,7 +617,7 @@ let filter = gaussian_kernel 3.
Computing the correlation between filter and the input data as before, we get a better smoothed curve in [@fig:signal:goog_gauss].
-{width=60% #fig:signal:goog_gauss}
+{width=60% #fig:signal:goog_gauss}
Filters can be generally categorised by their usage into time domain filters and frequency domain filters.
Time domain filters are used when the information is encoded in the shape of the signal's waveform, and can be used for tasks such as smoothing, waveform shaping, etc.
@@ -683,7 +687,7 @@ let y2 = Owl_fft.D.irfft ~axis:0 yf
We can similarly check how the smoothing approach works in [@fig:signal:goog2].
Compared to the previous two smoothing methods, FFT generates a better curve to describe the trend of the stock price.
-{width=60% #fig:signal:goog2}
+{width=60% #fig:signal:goog2}
### FFT and Image Convolution
@@ -693,7 +697,7 @@ The convolution in DNN is often applied on ndarrays.
It is not complex: you start with an input image in the form of ndarray, and use another smaller ndarray called "kernel" to slide over the input image step by step, and at each position, an element-wise multiplication is applied, and the result is filled into corresponding position in an output ndarray.
This process can be best illustrated in [@fig:signal:conv] (inspired by the nice work by [Andrej Karpathy](https://cs231n.github.io/convolutional-networks/):
-{width=90% #fig:signal:conv}
+{width=90% #fig:signal:conv}
Owl has provided thorough support of convolution operations:
diff --git a/book/slicing/README.md b/chapters/slicing.md
similarity index 97%
rename from book/slicing/README.md
rename to chapters/slicing.md
index 856f7d8..2a0c804 100644
--- a/book/slicing/README.md
+++ b/chapters/slicing.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Slicing and Broadcasting
Indexing, slicing, and broadcasting are three fundamental functions to manipulate multidimensional arrays.
@@ -112,7 +116,7 @@ These examples are based on a `8x8` matrix.
let x = Arr.sequential [|8; 8|]
```
-{width=95% #fig:slicing:example_slice_01}
+{width=95% #fig:slicing:example_slice_01}
The first example as shown in [@fig:slicing:example_slice_01](a)is to take one column of this matrix. It can be achieved by using both basic and fancy slicing:
@@ -166,7 +170,7 @@ R0 20 21 22
```
-{width=95% #fig:slicing:example_slice_02}
+{width=95% #fig:slicing:example_slice_02}
The next example in [@fig:slicing:example_slice_02](a) is a bit more complex. It chooses certain rows, and then choose the columns by a fixed step 2. We can use the fancy slicing in this way:
@@ -498,7 +502,7 @@ let y' = Arr.expand y 4;;
If these seem too abstract, here are three concrete 2D examples for you to better understand how the shapes are extended in the broadcasting.
The first example is vector multiplied by scalar.
-{width=90% #fig:slicing:broadcast_01}
+{width=90% #fig:slicing:broadcast_01}
```ocaml env=broadcasting_example01
let a = Arr.sequential [|1;3|]
@@ -514,7 +518,7 @@ R0 3 4 5
The second example is matrix plus vector.
-{width=90% #fig:slicing:broadcast_02}
+{width=90% #fig:slicing:broadcast_02}
```ocaml env=broadcasting_example01
let b0 = Arr.sequential [|3;3|]
@@ -533,7 +537,7 @@ R2 6 14 24
The third example is column vector plus row vector.
-{width=90% #fig:slicing:broadcast_03}
+{width=90% #fig:slicing:broadcast_03}
```ocaml env=broadcasting_example01
diff --git a/book/stats/README.md b/chapters/stats.md
similarity index 98%
rename from book/stats/README.md
rename to chapters/stats.md
index d7ccf50..6c43567 100644
--- a/book/stats/README.md
+++ b/chapters/stats.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Statistical Functions
Statistics is an indispensable tool for data analysis, it helps us to gain the insights from data. The statistical functions in Owl can be categorised into three groups: descriptive statistics, distributions, and hypothesis tests.
@@ -122,7 +126,7 @@ Plot.output h;;
In subplot 1, we can see the second data set has much wider spread. In subplot 2, we also plot corresponding the probability density functions of the two data sets.
-{ width=90% #fig:stats:plot_02 }
+{ width=90% #fig:stats:plot_02 }
The CDF of Gaussian can be calculated with infinite summation, i.e. integration:
@@ -139,7 +143,7 @@ Plot.(legend_on h ~position:SouthEast [|"mu=1,sigma=1"; "mu=12, sigma=3"|]);
Plot.output h
```
-{ width=70% #fig:stats:plot_gaussian_cdf }
+{ width=70% #fig:stats:plot_gaussian_cdf }
### Descriptive Statistics
@@ -295,7 +299,7 @@ let _ =
output h
```
-{ width=60% #fig:stats:gamma_pdf}
+{ width=60% #fig:stats:gamma_pdf}
## Multiple Variables
@@ -606,7 +610,7 @@ let h = Plot.create ~m:1 ~n:2 "plot_01.png" in
The subfigure 1 shows the functional relation between `x` and `y` whilst the subfiture 2 shows the relation between `x` and `z`. Because we have added higher-level noise to `z`, the points in the second figure are more diffused.
-{ width=90% #fig:stats:plot_01 }
+{ width=90% #fig:stats:plot_01 }
Intuitively, we can easily see there is stronger relation between `x` and `y` from the figures. But how about numerically? In many cases, numbers are preferred because they are easier to compare with by a computer. The following snippet calculates the Pearson correlation between `x` and `y`, as well as the correlation between `x` and `z`. As we see, the smaller correlation value indicates weaker linear relation between `x` and `z` comparing to that between `x` and `y`.
diff --git a/book/testing/README.md b/chapters/testing.md
similarity index 98%
rename from book/testing/README.md
rename to chapters/testing.md
index a9de09e..9d285eb 100644
--- a/book/testing/README.md
+++ b/chapters/testing.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Testing Framework
Every proper software requires testing, and so is Owl. All too often we have found that testing can help use to find potential errors we had not anticipated during coding.
@@ -137,11 +141,11 @@ let () =
That's all. Now you can try `make test` and check if the functions are implemented well:
-{#fig:testing:example_00}
+{#fig:testing:example_00}
What if one of the test functions does not pass? Let's intentionally make a wrong test, such as asserting the matrix in the `rank` test is 1 instead of the correct answer 2, and run the test again:
-{#fig:testing:example_01}
+{#fig:testing:example_01}
## What Could Go Wrong
diff --git a/book/visualisation/README.md b/chapters/visualization.md
similarity index 88%
rename from book/visualisation/README.md
rename to chapters/visualization.md
index ce55977..a43ea34 100644
--- a/book/visualisation/README.md
+++ b/chapters/visualization.md
@@ -1,3 +1,7 @@
+---
+layout: page
+---
+
# Visualisation
Owl is an OCaml numerical library. Besides its extensive supports to matrix operations, it also has a flexible plotting module. Owl's `Plot` module is designed to help you in making fairly complicated plots with minimal coding efforts. It is built atop of [Plplot[](http://plplot.sourceforge.net/index.php) but hides its complexity from users.
@@ -41,7 +45,7 @@ You will find that these commands are similar to those in other plotting tools s
Once you call `Plot.output`, the plot will be "sealed" and written into the final file.
The generated figure is shown below.
-{ width=70% #fig:visualisation:plot_001}
+{ width=70% #fig:visualisation:plot_001}
If this looks too basic for you, then we have some fancy 3-D mesh graphs in the next part.
@@ -80,7 +84,7 @@ In the following, we will provide some examples to show how to use the `spec` pa
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_020}
+{ width=90% #fig:visualisation:plot_020}
The second example shows how to tune the `surf` plotting function in drawing a 3D surface.
@@ -111,7 +115,7 @@ The second example shows how to tune the `surf` plotting function in drawing a 3
- : unit = ()
```
-{ width=90%,#fig:visualisation:plot_021 }
+{ width=90%,#fig:visualisation:plot_021 }
## Subplots
@@ -158,7 +162,7 @@ Indeed, you can change the number of rows and columns of the subgraph layout by
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_002}
+{ width=90% #fig:visualisation:plot_002}
## Multiple Lines
@@ -175,7 +179,7 @@ Here is one example with both sine and cosine lines in one plot.
- : unit = ()
```
-{ width=70% #fig:visualisation:plot_024 }
+{ width=70% #fig:visualisation:plot_024 }
Here is another example which has both histogram and line plot in one figure.
@@ -195,7 +199,7 @@ Here is another example which has both histogram and line plot in one figure.
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_025 }
+{ width=90% #fig:visualisation:plot_025 }
So as long as you "hold" the plot without calling `Plot.output`, you can plot many data sets in one figure.
@@ -240,7 +244,7 @@ Despite of its messy looking, the following example shows how to use legend in O
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_026 }
+{ width=90% #fig:visualisation:plot_026 }
## Drawing Patterns
@@ -265,7 +269,7 @@ The plotting module supports multiple pattern of lines, as shown below:
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_004 }
+{ width=90% #fig:visualisation:plot_004 }
Similarly, we can also fill rectangles with different patterns, as shown in the example below.
@@ -283,7 +287,7 @@ Similarly, we can also fill rectangles with different patterns, as shown in the
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_005 }
+{ width=90% #fig:visualisation:plot_005 }
## Line Plot
@@ -302,7 +306,7 @@ Line plot is the most basic function. You can specify the colour, marker, and li
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_022 }
+{ width=90% #fig:visualisation:plot_022 }
## Scatter Plot
@@ -337,7 +341,7 @@ The example below actually shows the various patterns of markers. They are refer
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_006 }
+{ width=90% #fig:visualisation:plot_006 }
## Stairs Plot
@@ -359,7 +363,7 @@ The step plot is also called "stairstep plot", since it draws the elements in a
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_007 }
+{ width=90% #fig:visualisation:plot_007 }
## Box Plot
@@ -378,7 +382,7 @@ A box plot graphically shows groups of numerical data through their quartiles. I
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_008 }
+{ width=90% #fig:visualisation:plot_008 }
## Stem Plot
@@ -399,7 +403,7 @@ Stem plot is simple, as the following code shows.
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_009 }
+{ width=90% #fig:visualisation:plot_009 }
Stem plot is often used to show the autocorrelation of a variable, therefore Plot module already includes `autocorr` for your convenience.
@@ -418,7 +422,7 @@ Stem plot is often used to show the autocorrelation of a variable, therefore Plo
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_010 }
+{ width=90% #fig:visualisation:plot_010 }
## Area Plot
@@ -439,7 +443,7 @@ Area plot is similar to the line plot, but it fills the space between the line a
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_011 }
+{ width=90% #fig:visualisation:plot_011 }
## Histogram & CDF Plot
@@ -460,7 +464,7 @@ Given a series of measurements, you can easily plot the histogram and empirical
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_012 }
+{ width=90% #fig:visualisation:plot_012 }
## Log Plot
@@ -495,7 +499,7 @@ In the Owl plots, you can choose to use the log-scale on either or both x and y
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_013 }
+{ width=90% #fig:visualisation:plot_013 }
## 3D Plot
@@ -521,7 +525,7 @@ First, let's look at `mesh` and `surf` functions.
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_014 }
+{ width=90% #fig:visualisation:plot_014 }
It is easy to control the viewpoint with `altitude` and `azimuth` parameters. Here is an example.
@@ -541,7 +545,7 @@ It is easy to control the viewpoint with `altitude` and `azimuth` parameters. He
The generated figure is shown as below.
-{ width=90% #fig:visualisation:plot_015 }
+{ width=90% #fig:visualisation:plot_015 }
Here is another similar example with different functions.
@@ -571,7 +575,7 @@ Here is another similar example with different functions.
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_016 }
+{ width=90% #fig:visualisation:plot_016 }
Finally, let's look at how heatmap and contour plot look like, using the same function as before.
@@ -598,7 +602,7 @@ Finally, let's look at how heatmap and contour plot look like, using the same fu
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_017 }
+{ width=90% #fig:visualisation:plot_017 }
## Advanced Statistical Plot
@@ -641,7 +645,7 @@ A `qqplot` displays a quantile-quantile plot of the quantiles of the sample data
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_018 }
+{ width=90% #fig:visualisation:plot_018 }
The `probplot` is similar to `qqplot`. It contains two special cases: `normplot` for when the given theoretical distribution is Normal distribution, and `wblplot` for Weibull Distribution. Here is an example of them.
@@ -664,7 +668,7 @@ The `probplot` is similar to `qqplot`. It contains two special cases: `normplot`
- : unit = ()
```
-{ width=90% #fig:visualisation:plot_019 }
+{ width=90% #fig:visualisation:plot_019 }
## Summary
diff --git a/docs/aeos.html b/docs/aeos.html
deleted file mode 100644
index 13656f2..0000000
--- a/docs/aeos.html
+++ /dev/null
@@ -1,104 +0,0 @@
-Automatic Empirical Tuning - Owl Online Tutorials
-Automatic Empirical Tuning
-The behaviours of a software system are controlled by many of its parameters. These parameters can significantly impact the performance of the software. Assigning optimal values to the parameters to achieve the best performance is one core task for software optimisation. This chapter reveals the technical details of the parameter tunning module in Owl.
-
-What is Parameter Tuning
-Recent research work on parameter tuning mostly focus on hyper-parameter tuning, such as optimising the parameters of stochastic gradient in machine learning applications. Similarly, tuning code and parameters in low-level numerical libraries is equally important. For example, Automatically Tuned Linear Algebra Software (ATLAS) and the recent Intel Math Kernel Library (MKL) are both software libraries of optimised math routines for scientific and engineering computation. They are widely used in many popular high-level platforms such as Matlab and TensorFlow. One of the reasons these libraries can provide optimal performance is that they adopt the paradigm of Automated Empirical Optimisation of Software (AEOS). A technique that chooses the best method and parameters to use on a given platform to perform a required operation. One highly optimised routine may run much faster than a naively coded one. Optimised code is usually platform- and hardware-specific, but an optimised routine on one machine could perform badly on the other. Though Owl currently does not plan to improve the low-level libraries it depends on, as an initial endeavour to apply the AEOS paradigm in Owl, one ideal tuning point is the parameters of OpenMP used in Owl.
-
-
-Why Parameter Tuning in Owl
-Currently many computers contain shared memory multiprocessors. OpenMP is used in key operations in libraries such as Eigen and MKL. Owl has also utilised OpenMP in many mathematical operations to boost their performance by multi-threading calculation. For example, the figure below shows that when we apply the sine function on an ndarray in Owl using a 4-core CPU MacBook, the OpenMP version only takes about a third of the execution time compared with the non-OpenMP version.
-
- Compare performance of sin operations
-
-
Compare performance of sin operations
-
-However, performance improvement does not come for free. Overhead of using OpenMP comes from time spent on scheduling chunks of work to each thread, managing locks on critical sections, and startup time of creating threads, etc. Therefore, when the input ndarray is small enough, these overheads might overtake the benefit of threading. What is a suitable input size to use OpenMP then? This question would be easy to solve if there is one single suitable input size threshold for every operation, but that’s not the case.
-In a small experiment, I compare the performance of two operations: abs (calculate absolute value) and sin, in three cases, including running them without using OpenMP, with 2 threads OpenMP, and with 4 threads OpenMP.
-
- Observe the cross-points of OpenMP and non-OpenMP operation
-
-
Observe the cross-points of OpenMP and non-OpenMP operation
-
-The result above shows that, with growing input size, for sine operation, the OpenMP version outperforms the non-OpenMP version at a size of less than 1000, but for abs operation, that cross point is at about 1,000,000. The complexity of math operations varies greatly, and the difference is even starker when we compare their performance on different machines. Note that both axes use log-scale, and that is why a small deviation when the input array size is small looks large in the figure. This issue becomes more complex when considered in real applications such as deep neural networks, where one needs to deal with operations of vastly different complexity and input sizes. Thus one fixed threshold for several operations is not an ideal solution. Considering these factors, I need a fine-grained method to decide a suitable OpenMP threshold for each operation.
-
-
-How to Tune OpenMP Parameters
-Towards this end, we implement the AEOS module in Owl. The idea is to add a tuning phase before compiling and installing Owl, so that each operation learns a suitable threshold parameter to decide if OpenMP should be used or not, depending on input size. The key idea of parameter tuning is simple. We implement two versions of each operation, one using OpenMP and the other not. We then measure their execution time for various sizes of input. Each measurement is repeated multiple times, and to reduce the effect of outliers, only the values that are within first and third percentiles are used. After removing outliers, regression method is performed to find a suitable input size threshold. According to our initial experiment, linear regression is fit to estimate the OpenMP parameters here.
-Since this tuning phase is executed before compiling Owl, the AEOS module is independent of Owl, and all necessary implementation is coded separately to ensure that future changes of Owl do not affect the AEOS module itself. The tuned parameters then need to be passed to Owl. When the OpenMP switch is turned on, the AEOS module generates a C header file which contains the definition of macros, each of which defines a threshold for one operation. When this header file is not generated, pre-defined default macro values are used instead. After that, Owl is compiled with this header file and uses these tuned parameters in its math operations. The tuning phase only needs to be performed once on each machine during installation.
-The design of the AEOS module focuses on keeping tuning simple, effective, and flexible. Each operation is implemented as a single OCaml module, so that support for new operations can be easily added. The interface of such a module is shown as below.
-
-
module Sin : sig
- type t = {
- mutable name : string;
- mutable param : string;
- mutable value : int;
- mutable input : int array array;
- mutable y : float array
- }
- (* Tuner type definition. *)
- val make : unit -> t
- (* Create the tuner. *)
- val tune : t -> unit
- (* Tuning process. *)
- val save_data : t -> unit
- (* Save tuned data to csv file for later analysis. *)
- val to_string : t -> string
- (* Convert the tuned parameter(s) to string to be written on file *)
-end
-
We expect that tuning does not have to be only about OpenMP parameters, and that different regression methods could be used in the future. For example, the Theil–Sen estimator, a robust method to fit a line to sample points, can be plugged in for parameter estimation if necessary. In each module, arbitrary tuning procedures can be plugged in as long as the interface is followed. The AEOS module is implemented in such a way that brings little interference to the main Owl library. You only need to switch the ENABLE_OPENMP flag from 0 to 1 in the dune file to utilise this feature.
-
-
-Make a Difference
-To evaluate the performance of tuned OpenMP thresholds, we need a metric to compare them. One metric to compare two thresholds is proposed as below. First we generate a series of ndarrays, whose sizes grow by certain steps until they reach a given maximum number, e.g. 1,000,000. Note that only input sizes that fall between these two thresholds are chosen to be used. We can then calculate the performance improvement ratio of the OpenMP version function over the non-OpenMP version on these chosen ndarrays. The ratios are added up, and then amortised by the total number of ndarrays.
-The table below presents the tuned threshold values of five operations on a MacBook with a 1.1GHz Intel Core m3 CPU and a Raspberry Pi 3B. We can see that they vary across different operations and different machines, depending on their computation complexity. For example, on MacBook, the tuning result is “max int”, which means that for the relatively simple square root calculation OpenMP should not be used, but that’s not the case on Raspberry Pi. Also, note that the less powerful Raspberry Pi tends to get lower thresholds.
-
-Tuned results using AEOS on different platforms {#tbl:aeos:perf}
-
-
-
-
-
-
-
-
-
-
-| Platform |
-\(tan\) |
-\(sqrt\) |
-\(sin\) |
-\(exp\) |
-\(sigmoid\) |
-
-
-| MacBook |
-1632 |
-max_int |
-1294 |
-123 |
-1880 |
-
-
-| Raspberry Pi |
-1189 |
-209 |
-41 |
-0 |
-0 |
-
-
-
-We then evaluate the performance improvement after applying AEOS. We compare each generated parameter with 30 random generated thresholds. These measured average ratios are then presented as a box plot, as shown in the figure below.
-
- Evaluation of the performance improvement of AEOS
-
-
Evaluation of the performance improvement of AEOS
-
-It can be observed that in general more than 20% average performance improvement can be expected on the MacBook. The result on Raspberry Pi shows a larger deviation but also a higher performance gain (about 30% on average). One reason of this difference could be that a suitable threshold on Raspberry Pi tends to be smaller, leading to a larger probability to outperform a randomly generated value. Note that we cannot proclaim that the tuned parameters are always optimal, since the figure shows that in some rare cases where the improvement percentages are minus, the randomly found values indeed perform better. Also, the result seems to suggest that AEOS can provide a certain bound, albeit a loose one, on the performance improvement, regardless of the type of operation. These interesting issues require further investigation.
-
-
-Summary
-This chapter introduces the idea of automatic tuning in numerical libraries, and the usage and implementation of the tuning module in Owl. Using the OpenMP threshold for operations, we show how this module can be used to automatically improve the computation performance on different devices.
-
-
- Next: Chapter 21Computation Graph
\ No newline at end of file
diff --git a/docs/algodiff.html b/docs/algodiff.html
deleted file mode 100644
index 540e7f2..0000000
--- a/docs/algodiff.html
+++ /dev/null
@@ -1,1335 +0,0 @@
-Algorithmic Differentiation - Owl Online Tutorials
-Algorithmic Differentiation
-In science and engineering it is often necessary to study the relationship between two or more quantities, where changing of one quantity leads to changes of others. For example, in describing the motion an object, we denote velocity \(v\) of an object with the change of the distance regarding time:
-\[v = \lim_{\Delta~t}\frac{\Delta~s}{\Delta~t} = \frac{ds}{dt}.\] {#eq:algodiff:def}
-This relationship \(\frac{ds}{dt}\) is called “derivative of \(s\) with respect to \(t\)”. This process can be extended to higher dimensional space. For example, think about a solid block of material, placed in a cartesian axis system. You heat it at some part of it and cool it down at some other place, and you can imagine that the temperature \(T\) at different position of this block: \(T(x, y, z)\). In this field, we can describe this change with partial derivatives along each axis:
-\[\nabla~T = (\frac{\partial~T}{\partial~x}, \frac{\partial~T}{\partial~y}, \frac{\partial~T}{\partial~z}).\] {#eq:algodiff:grad}
-Here, we call the vector \(\nabla~T\) gradient of \(T\). The procedure to calculating derivatives and gradients is referred to as differentiation.
-Differentiation is crucial to many scientific related fields: find maximum or minimum values using gradient descent; ODE; Non-linear optimisation such as KKT optimality conditions is still a prime application. One new crucial application is in machine learning. The training of a supervised machine learning model often requires the forward propagation and back propagation phases, where the back propagation can be seen as the derivative of the whole model as a large function. We will talk about these applications in the next chapters.
-Differentiation often requires complex computation, and in these applications we surely need to rely on some computing framework to support it. Differentiation module is built into the core of Owl. In this chapter, starting from the basic computation rule in performing differentiation, we will introduce how Owl supports this important feature step by step.
-
-Chain Rule
-Before diving into how to do differentiation on computers, let’s recall how to do it with a pencil and paper from our Calculus 101. One of the most important rules in performing differentiation is the chain rule. In calculus, the chain rule is a formula to compute the derivative of a composite function. Suppose we have two functions \(f\) and \(g\), then the chain rule states that:
-\[F'(x)=f'(g(x))g'(x).\] {#eq:algodiff:chainrule01}
-This seemingly simple rule is one of the most fundamental rules in calculating derivatives. For example, let \(y = x^a\), where \(a\) is a real number, and then we can get \(y'\) using the chain rule. Specifically, let \(y=e^{\ln~x^a} = e^{a~\ln~x}\), and then we can set \(u= a\ln{x}\) so that now \(y=e^u\). By applying the chain rule, we have:
-\[y' = \frac{dy}{du}~\frac{du}{dx} = e^u~a~\frac{1}{x} = ax^{a-1}.\]
-Besides the chain rule, it’s helpful to remember some basic differentiation equations, as shown in [@tbl:algodiff:chainrule02]. Here \(x\) is variable and both \(u\) and \(v\) are functions with regard to \(x\). \(C\) is constant. These equations are the building blocks of differentiating more complicated ones. Of course, this very short list is incomplete. Please refer to the calculus textbooks for more information. Armed with the chain rule and these basic equations, wen can begin to solve more differentiation problems than you can imagine.
-
-A Short Table of Basic Derivatives {#tbl:algodiff:chainrule02}
-
-
-
-
-
-
-
-
-
-| \((u(x) + v(x))'\) |
-\(u'(x) + v'(x)\) |
-
-
-| \((C\times~u(x))'\) |
-\(C\times~u'(x)\) |
-
-
-| \((u(x)v(x))'\) |
-\(u'(x)v(x) + u(x)v'(x)\) |
-
-
-| \((\frac{u(x)}{v(x)})'\) |
-\(\frac{u'(x)v(x) - u(x)v'(x)}{v^2(x)}\) |
-
-
-| \(\sin(x)\) |
-\(\cos(x)\) |
-
-
-| \(e^x\) |
-\(e^x\) |
-
-
-| \(log_a(x)\) |
-\(\frac{1}{x~\textrm{ln}~a}\) |
-
-
-
-
-
-Differentiation Methods
-As the models and algorithms become increasingly complex, sometimes the function being implicit, it is impractical to perform manual differentiation. Therefore, we turn to computer-based automated computation methods. There are three different ways widely used to automate differentiation: numerical differentiation, symbolic differentiation, and algorithmic differentiation.
-Numerical Differentiation
-The numerical differentiation comes from the definition of derivative in [@eq:algodiff:def]. It uses a small step \(\delta\) to approximate the limit in the definition:
-\[f'(x) = \lim_{\delta~\to~0}\frac{f(x+\delta) - f(x)}{\delta}.\] {#eq:algodiff:numdiff}
-This method is pretty easy to follow: evaluate the given \(f\) at point \(x\), and then choose a suitable small amount \(\delta\), add it to the original \(x\) and then re-evaluate the function. Then the derivative can be calculated using [@eq:algodiff:numdiff]. As long as you knows how to evaluate function \(f\), this method can be applied. The function \(f\) per se can be treated a black box. The implementation is also straightforward. However, the problem with this method is prone to truncation errors and round-off errors.
-The truncation error comes from the fact that [@eq:algodiff:numdiff] is only an approximation of the true gradient value. We can see their difference with Taylor expansion:
-\[f(x+h) = f(x) + hf'(x) + \frac{h^2}{2}f^{''}(\sigma_h)\]
-Here \(h\) is the step size and \(\sigma_h\) is in the range of \([x, x+h]\). This can be transformed into:
-\[\frac{h^2}{2}f^{''}(\sigma_h)= f'(x) - \frac{f(x+h) - f(x)}{h}.\]
-This represent the truncation error in the approximation. For example, for function \(f(x) = sin(x)\), \(f''(x) = -sin(x)\). Suppose we want to calculate the derivative at \(x=1\) numerically using a step size of 0.01, then the truncation error should be in the range \(\frac{0.01^2}{2}[sin(1), sin(1.01)]\).
-We can see the effect of this truncation error in an example, by using an improperly large step size. Let’s say we want to find the derivative of \(f(x) = cos(x)\) at point \(x=1\). Basic calculus tells us that it should be equals to \(-sin(1) = 0.84147\), but the result is obviously a bit different.
-
-
let d =
- let _eps = 0.1 in
- let diff f x = (f (x +. _eps) -. f x) /. _eps in
- diff Maths.cos 1.
->val d : float = -0.867061844425624506
-
-
Another source of error is the round-off error. It is caused by representing numbers approximately in numerical computation during this process. Looking back at [@eq:algodiff:numdiff], we need to calculate \(f(x+h) - f(x)\), the subtraction of two almost identical number. That could lead to a large round-off errors in a computer. For example, let’s choose a very small step size this time:
-
-
let d =
- let _eps = 5E-16 in
- let diff f x = (f (x +. _eps) -. f x) /. _eps in
- diff Maths.cos 1.
->val d : float = -0.888178419700125121
-
-
It is still significantly different from the expected result. Actually if we use a even smaller step size \(1e-16\), the result becomes 0, which means the round-off error is large enough that \(f(x)\) and \(f(x+h)\) are deemed the same by the computer.
-Besides these sources of error, the numerical differentiation method is also slow due to requiring multiple evaluations of function \(f\). Some discussion about numerically solving derivative-related problems is also covered in the Ordinary Differentiation Equation chapter, where we focus on introducing solving these equations numerically, and how the impact of these errors can be reduced.
-Symbolic Differentiation
-Symbolic Differentiation is the opposite of numerical solution. It does not involve numerical computation, only math symbol manipulation. The rules we have introduced in [@tbl:algodiff:chainrule02] are actually expressed in symbols. Think about this function: \(f(x_0, x_1, x_2) = x_0 * x_1 * x_2\). If we compute \(\nabla~f\) symbolically, we end up with:
-\[\nabla~f = (\frac{\partial~f}{\partial~x_0}, \frac{\partial~f}{\partial~x_1}, \frac{\partial~f}{\partial~x_2}) = (x_1 * x_2, x_0 * x_2, x_1 * x_2).\]
-It is nice and accurate, leaving limited space for numerical errors. However, you can try to extend the number of variables from 3 to a large number \(n\), which means \(f(x) = \prod_{i=0}^{n-1}x_i\), and then try to perform the symbolic differentiation again.
-The point is that, symbolic computations tend to give a very large and complex result for even simple functions. It’s easy to have duplicated common sub computations, and produce exponentially large symbolic expressions. Therefore, as intuitive as it is, the symbolic differentiation method can easily takes a lot of memory in computer, and it is slow.
-The explosion of computation complexity is not the only limitation of symbolic differentiation. In contrast to the numerical differentiation, we have to treat the function in symbolic differentiation as a white box, knowing exactly what is inside of it. This further indicates that it cannot be used for arbitrary functions.
-Algorithmic Differentiation
-Algorithmic differentiation (AD) is a chain-rule based technique for calculating the derivatives with regards to input variables of functions defined in a computer programme. It is also known as automatic differentiation, though strictly speaking AD does not fully automate differentiation and can sometimes lead to inefficient code.
-AD can generate exact results with superior speed and memory usage, therefore highly applicable in various real world applications. Even though AD also follows the chain rule, it directly applies numerical computation for intermediate results. It is important to point out that AD is neither numerical nor symbolic differentiation. It takes the best parts of both worlds, as we will see in the next section. Actually, according to [@griewank1989automatic], the reverse mode of AD yields any gradient vector at no more than five times the cost of evaluating the function \(f\) itself. AD has already been implemented in various popular languages, including the ad in Python, JuliaDiff in Julia, and ADMAT in MATLAB, etc. In the rest of this chapter, we focus on introducing the AD module in Owl.
-
-
-How Algorithmic Differentiation Works
-We have seen the chain rules being applied on simple functions such as \(y=x^a\). Now let’s check how this rule can be applied to more complex computations. Let’s look at the function below:
-\[y(x_0, x_1) = (1 + e^{x_0~x_1 + sin(x_0)})^{-1}.\] {#eq:algodiff:example}
-This functions is based on a sigmoid function. Our goal is to compute the partial derivative \(\frac{\partial~y}{\partial~x_0}\) and \(\frac{\partial~y}{\partial~x_1}\). To better illustrate this process, we express [@eq:algodiff:example] as a graph, as shown in [@fig:algodiff:example_01]. At the right side of the figure, we have the final output \(y\), and at the roots of this graph are input variables. The nodes between them indicate constants or intermediate variables that are gotten via basic functions such as sine. All nodes are labelled by \(v_i\). An edge between two nodes represents an explicit dependency in the computation.
-
- Graph expression of function
-
-
Graph expression of function
-
-Based on this graphic representation, there are two major ways to apply the chain rules: the forward differentiation mode, and the reverse differentiation mode (not “backward differentiation”, which is a method used for solving ordinary differential equations). Next, we introduce these two methods.
-
-Forward Mode
-Our target is to calculate \(\frac{\partial~y}{\partial~x_0}\) (partial derivative regarding \(x_1\) should be similar). But hold your horse, let’s start with some earlier intermediate results that might be helpful. For example, what is \(\frac{\partial~x_0}{\partial~x_1}\)? It’s 0. Also, \(\frac{\partial~x_1}{\partial~x_1} = 1\). Now, things gets a bit trickier: what is \(\frac{\partial~v_3}{\partial~x_0}\)? It is a good time to use the chain rule:
-\[\frac{\partial~v_3}{\partial~x_0} = \frac{\partial~(x_0~x_1)}{\partial~x_0} = x_1~\frac{\partial~(x_0)}{\partial~x_0} + x_0~\frac{\partial~(x_1)}{\partial~x_0} = x_1.\]
-After calculating \(\frac{\partial~v_3}{\partial~x_0}\), we can then processed with derivatives of \(v_5\), \(v_6\), all the way to that of \(v_9\) which is also the output \(y\) we are looking for. This process starts with the input variables, and ends with output variables. Therefore, it is called forward differentiation. We can simplify the math notations in this process by letting \(\dot{v_i}=\frac{\partial~(v_i)}{\partial~x_0}\). The \(\dot{v_i}\) here is called tangent of function \(v_i(x_0, x_1, \ldots, x_n)\) with regard to input variable \(x_0\), and the original computation results at each intermediate point is called primal values. The forward differentiation mode is sometimes also called “tangent linear” mode.
-Now we can present the full forward differentiation calculation process, as shown in [@tbl:algodiff:forward]. Two simultaneous computing processes take place, shown as two separated columns: on the left side is the computation procedure specified by [@eq:algodiff:example]; on the right side shows computation of derivative for each intermediate variable with regard to \(x_0\). Let’s find out \(\dot{y}\) when setting \(x_0 = 1\), and \(x_1 = 1\).
-
-Computation process of forward differentiation {#tbl:algodiff:forward}
-
-
-
-
-
-
-
-
-
-
-| 0 |
-\(v_0 = x_0 = 1\) |
-\(\dot{v_0}=1\) |
-
-
-| 1 |
-\(v_1 = x_1 = 1\) |
-\(\dot{v_1}=0\) |
-
-
-| 2 |
-\(v_2 = sin(v_0) = 0.84\) |
-\(\dot{v_2} = cos(v_0)*\dot{v_0} = 0.54 * 1 = 0.54\) |
-
-
-| 3 |
-\(v_3 = v_0~v_1 = 1\) |
-\(\dot{v_3} = v_0~\dot{v_1} + v_1~\dot{v_0} = 1 * 0 + 1 * 1 = 1\) |
-
-
-| 4 |
-\(v_4 = v_2 + v3 = 1.84\) |
-\(\dot{v_4} = \dot{v_2} + \dot{v_3} = 1.54\) |
-
-
-| 5 |
-\(v_5 = 1\) |
-\(\dot{v_5} = 0\) |
-
-
-| 6 |
-\(v_6 = \exp{(v_4)} = 6.30\) |
-\(\dot{v_6} = \exp{(v_4)} * \dot{v_4} = 6.30 * 1.54 = 9.70\) |
-
-
-| 7 |
-\(v_7 = 1\) |
-\(\dot{v_7} = 0\) |
-
-
-| 8 |
-\(v_8 = v_5 + v_6 = 7.30\) |
-\(\dot{v_8} = \dot{v_5} + \dot{v_6} = 9.70\) |
-
-
-| 9 |
-\(y = v_9 = \frac{1}{v_8}\) |
-\(\dot{y} = \frac{-1}{v_8^2} * \dot{v_8} = -0.18\) |
-
-
-
-This procedure shown in this table can be illustrated in [@fig:algodiff:example_01_forward].
-
- Example of forward accumulation with computational graph
-
-
Example of forward accumulation with computational graph
-
-Of course, all the numerical computations here are approximated with only two significant figures. We can validate this result with algorithmic differentiation module in Owl. If you don’t understand the code, don’t worry. We will cover the details of this module in later sections.
-
-
open Algodiff.D
-let f x =
- let x1 = Mat.get x 0 0 in
- let x2 = Mat.get x 0 1 in
- Maths.(div (F 1.) (F 1. + exp (x1 * x2 + (sin x1))))
->val f : t -> t = <fun>
-let x = Mat.ones 1 2
->val x : t = [Arr(1,2)]
-let _ = grad f x |> unpack_arr
->- : A.arr =
-> C0 C1
->R0 -0.181974 -0.118142
-
-
Reverse Mode
-Now let’s rethink about this problem from the other direction, literally. Question remains the same, i.e. calculating \(\frac{\partial~y}{\partial~x_0}\). We still follow the same “step by step” idea from the forward mode, but the difference is that, we calculate it backward. For example, here we reduce the problem in this way: since in this graph \(y = v_7 / v_8\), if only we can have \(\frac{\partial~y}{\partial~v_7}\) and \(\frac{\partial~y}{\partial~v_8}\), then this problem should be one step closer towards my target problem.
-First of course, we have \(\frac{\partial~y}{\partial~v_9} = 1\), since \(y\) and \(v_9\) are the same. Then how do we get \(\frac{\partial~y}{\partial~v_7}\)? Again, time for chain rule:
-\[\frac{\partial~y}{\partial~v_7} = \frac{\partial~y}{\partial~v_9} * \frac{\partial~v_9}{\partial~v_7} = 1 * \frac{\partial~v_9}{\partial~v_7} = \frac{\partial~(v_7 / v_8)}{\partial~v_7} = \frac{1}{v_8}.\] {#eq:algodiff:reverse_01}
-Hmm, let’s try to apply a substitution to the terms to simplify this process. Let
-\[\bar{v_i} = \frac{\partial~y}{\partial~v_i}\]
-be the derivative of output variable \(y\) with regard to intermediate node \(v_i\). It is called the adjoint of variable \(v_i\) with respect to the output variable \(y\). Using this notation, [@eq:algodiff:reverse_01] can be expressed as:
-\[\bar{v_7} = \bar{v_9} * \frac{\partial~v_9}{\partial~v_7} = 1 * \frac{1}{v_8}.\]
-Note the difference between tangent and adjoint. In the forward mode, we know \(\dot{v_0}\) and \(\dot{v_1}\), then we calculate \(\dot{v_2}\), \(\dot{v_3}\), …. and then finally we have \(\dot{v_9}\), which is the target. Here, we start with knowing \(\bar{v_9} = 1\), and then we calculate \(\bar{v_8}\), \(\bar{v_7}\), …. and then finally we have \(\bar{v_0} = \frac{\partial~y}{\partial~v_0} = \frac{\partial~y}{\partial~x_0}\), which is also exactly our target. Again, \(\dot{v_9} = \bar{v_0}\) in this example, given that we are talking about derivative regarding \(x_0\) when we use \(\dot{v_9}\). Following this line of calculation, the reverse differentiation mode is also called adjoint mode.
-With that in mind, let’s see the full steps of performing reverse differentiation. First, we need to perform a forward pass to compute the required intermediate values, as shown in [@tbl:algodiff:reverse_01].
-
-Forward pass in the reverse differentiation mode {#tbl:algodiff:reverse_01}
-
-
-
-
-
-
-
-
-
-| 0 |
-\(v_0 = x_0 = 1\) |
-
-
-| 1 |
-\(v_1 = x_1 = 1\) |
-
-
-| 2 |
-\(v_2 = sin(v_0) = 0.84\) |
-
-
-| 3 |
-\(v_3 = v_0~v_1 = 1\) |
-
-
-| 4 |
-\(v_4 = v_2 + v3 = 1.84\) |
-
-
-| 5 |
-\(v_5 = 1\) |
-
-
-| 6 |
-\(v_6 = \exp{(v_4)} = 6.30\) |
-
-
-| 7 |
-\(v_7 = 1\) |
-
-
-| 8 |
-\(v_8 = v_5 + v_6 = 7.30\) |
-
-
-| 9 |
-\(y = v_9 = \frac{1}{v_8}\) |
-
-
-
-You might be wondering, this looks the same as the left side of [@tbl:algodiff:forward]. You are right. These two are exactly the same, and we repeat it again to make the point that, this time you cannot perform the calculation with one pass. You must compute the required intermediate results first, and then perform the other “backward pass”, which is the key point in reverse mode.
-
-Computation process of the backward pass in reverse differentiation {#tbl:algodiff:reverse_02}
-
-
-
-
-
-
-
-
-
-| 10 |
-\(\bar{v_9} = 1\) |
-
-
-| 11 |
-\(\bar{v_8} = \bar{v_9}\frac{\partial~(v_7/v_8)}{\partial~v_8} = 1 * \frac{-v_7}{v_8^2} = \frac{-1}{7.30^2} = -0.019\) |
-
-
-| 12 |
-\(\bar{v_7} = \bar{v_9}\frac{\partial~(v_7/v_8)}{\partial~v_7} = \frac{1}{v_8} = 0.137\) |
-
-
-| 13 |
-\(\bar{v_6} = \bar{v_8}\frac{\partial~v_8}{\partial~v_6} = \bar{v_8} * \frac{\partial~(v_6 + v5)}{\partial~v_6} = \bar{v_8}\) |
-
-
-| 14 |
-\(\bar{v_5} = \bar{v_8}\frac{\partial~v_8}{\partial~v_5} = \bar{v_8} * \frac{\partial~(v_6 + v5)}{\partial~v_5} = \bar{v_8}\) |
-
-
-| 15 |
-\(\bar{v_4} = \bar{v_6}\frac{\partial~v_6}{\partial~v_4} = \bar{v_8} * \frac{\partial~\exp{(v_4)}}{\partial~v_4} = \bar{v_8} * e^{v_4}\) |
-
-
-| 16 |
-\(\bar{v_3} = \bar{v_4}\frac{\partial~v_4}{\partial~v_3} = \bar{v_4} * \frac{\partial~(v_2 + v_3)}{\partial~v_3} = \bar{v_4}\) |
-
-
-| 17 |
-\(\bar{v_2} = \bar{v_4}\frac{\partial~v_4}{\partial~v_2} = \bar{v_4} * \frac{\partial~(v_2 + v_3)}{\partial~v_2} = \bar{v_4}\) |
-
-
-| 18 |
-\(\bar{v_1} = \bar{v_3}\frac{\partial~v_3}{\partial~v_1} = \bar{v_3} * \frac{\partial~(v_0*v_1)}{\partial~v_1} = \bar{v_4} * v_0 = \bar{v_4}\) |
-
-
-| 19 |
-\(\bar{v_{02}} = \bar{v_2}\frac{\partial~v_2}{\partial~v_0} = \bar{v_2} * \frac{\partial~(sin(v_0))}{\partial~v_0} = \bar{v_4} * cos(v_0)\) |
-
-
-| 20 |
-\(\bar{v_{03}} = \bar{v_3}\frac{\partial~v_3}{\partial~v_0} = \bar{v_3} * \frac{\partial~(v_0 * v_1)}{\partial~v_0} = \bar{v_4} * v_1\) |
-
-
-| 21 |
-\(\bar{v_0} = \bar{v_{02}} + \bar{v_{03}} = \bar{v_4}(cos(v_0) + v_1) = \bar{v_8} * e^{v_4}(0.54 + 1) = -0.019 * e^{1.84} * 1.54 = -0.18\) |
-
-
-
-Note that things a bit different for \(x_0\). It is used in both intermediate variables \(v_2\) and \(v_3\). Therefore, we compute the adjoint of \(v_0\) with regard to \(v_2\) (step 19) and \(v_3\) (step 20), and accumulate them together (step 20).
-Similar to the forward mode, reverse differentiation process in [] can be clearly shown in figure [@fig:algodiff:example_01_reverse].
-
- Example of reverse accumulation with computational graph
-
-
Example of reverse accumulation with computational graph
-
-This result \(\bar{v_0} = -0.18\) agrees what we have have gotten using the forward mode. However, if you still need another fold of insurance, we can use Owl to perform a numerical differentiation. The code would be similar to that of using algorithmic differentiation as shown before.
-
-
module D = Owl_numdiff_generic.Make (Dense.Ndarray.D);;
-
-let x = Arr.ones [|2|]
-
-let f x =
- let x1 = Arr.get x [|0|] in
- let x2 = Arr.get x [|1|] in
- Maths.(div 1. (1. +. exp (x1 *. x2 +. (sin x1))))
-
And then we can get the differentiation result at the point \((x_0, x_1) = (0, 0)\), and it agrees with the previous results.
-
-
D.grad f x
->- : D.arr =
-> C0 C1
->R -0.181973 -0.118142
-
-
Before we move on, did you notice that we get \(\frac{\partial~y}{\partial~x_1}\) for “free” while calculating \(\frac{\partial~y}{\partial~x_0}\). Noticing this will help you to understand the next section, about how to decide which mode (forward or backward) to use in practice.
-
-
-Forward or Reverse?
-Since both modes can be used to differentiate a function, the natural question is which mode we should choose in practice. The short answer is: it depends on your function. In general, given a function that you want to differentiate, the rule of thumb is:
-
-- if the number of input variables is far larger than that of the output variables, then use reverse mode;
-- if the number of output variables is far larger than that of the input variables, then use forward mode.
-
-For each input variable, we need to seed individual variable and perform one forward pass. The number of forward passes increase linearly as the number of inputs increases. However, for backward mode, no matter how many inputs there are, one backward pass can give us all the derivatives of the inputs. I guess now you understand why we need to use backward mode for f. One real-world example of f is machine learning and neural network algorithms, wherein there are many inputs but the output is often one scalar value from loss function.
-Backward mode needs to maintain a directed computation graph in the memory so that the errors can propagate back; whereas the forward mode does not have to do that due to the algebra of dual numbers. Later we will show example about choosing between these two methods.
-
-
-
-A Strawman AD Engine
-Surely you don’t want to make these tables every time you are faced with a new computation. Now that you understand how to use forward and reverse propagation to do algorithmic differentiation, let’s look at how to do it with computer programmes. In this section, we will introduce how to implement the differentiation modes using pure OCaml code. Of course, these will be elementary straw man implementations compared to the industry standard module provided by Owl, but nevertheless are important to the understanding of the latter.
-We will again use the function in [@eq:algodiff:example] as example, and we limit the computation in our small AD engine to only these basic operations: add, div, mul.
-
-Simple Forward Implementation
-How can we represent [@tbl:algodiff:forward]? An intuitive answer is to build a table when traversing the computation graph. However, that’s not a scalable: what if there are hundreds and thousands of computation steps? A closer look at the [@tbl:algodiff:forward] shows that an intermediate node actually only need to know the computation results (primal value and tangent value) of its parents nodes to compute its own results. Based on this observation, we can define a data type that preserve these two values:
-
-
type df = {
- mutable p: float;
- mutable t: float
-}
-
-let primal df = df.p
-let tangent df = df.t
-
And now we can define operators that accept type df as input and outputs the same type:
-
-
let sin_ad x =
- let p = primal x in
- let t = tangent x in
- let p' = Owl_maths.sin p in
- let t' = (Owl_maths.cos p) *. t in
- {p=p'; t=t'}
-
The core part of this function is to define how to compute its function value p' and derivative value t' based on the input df data. Now you can easily extend it towards the exp operation:
-
-
let exp_ad x =
- let p = primal x in
- let t = tangent x in
- let p' = Owl_maths.exp p in
- let t' = p' *. t in
- {p=p'; t=t'}
-
But what about operators that accept multiple inputs? Let’s see multiplication.
-
-
let mul_ad a b =
- let pa = primal a in
- let ta = tangent a in
- let pb = primal b in
- let tb = tangent b in
- let p' = pa *. pb in
- let t' = pa *. tb +. ta *. pb in
- {p=p'; t=t'}
-
Though it require a bit more unpacking, its forward computation and derivative function are simple enough. Similarly, you can extend that towards similar operations: the add and div.
-
-
let add_ad a b =
- let pa = primal a in
- let ta = tangent a in
- let pb = primal b in
- let tb = tangent b in
- let p' = pa +. pb in
- let t' = ta +. tb in
- {p=p'; t=t'}
-
-let div_ad a b =
- let pa = primal a in
- let ta = tangent a in
- let pb = primal b in
- let tb = tangent b in
- let p' = pa /. pb in
- let t' = (ta *. pb -. tb *. pa) /. (pb *. pb) in
- {p=p'; t=t'}
-
Based on these functions, we can provide a tiny wrapper named diff:
-
-
let diff f =
- let f' x y =
- let r = f x y in
- primal r, tangent r
- in
- f'
-
And that’s all! Now we can do differentiation on our previous example.
-
-
let x0 = {p=1.; t=1.}
-let x1 = {p=1.; t=0.}
-
These are inputs. We know the tangent of x1 with regard to x0 is zero, and so are the other constants used in the computation.
-
-
let f x0 x1 =
- let v2 = sin_ad x0 in
- let v3 = mul_ad x0 x1 in
- let v4 = add_ad v2 v3 in
- let v5 = {p=1.; t=0.} in
- let v6 = exp_ad v4 in
- let v7 = {p=1.; t=0.} in
- let v8 = add_ad v5 v6 in
- let v9 = div_ad v7 v8 in
- v9
->val f : df -> df -> df = <fun>
-let pri, tan = diff f x0 x1
->val pri : float = 0.13687741466075895
->val tan : float = -0.181974376561731321
-
-
The results are just as calculated in the previous section.
-
-
-Simple Reverse Implementation
-The reverse mode is a bit more complex. As shown in the previous section, forward mode only needs one pass, but the reverse mode requires two passes, a forward pass followed by a backward pass. This further indicates that, besides computing primal values, we also need to “remember” the operations along the forward pass, and then utilise these information in the backward pass. There are multiple ways to do that, e.g. a stack or graph structure. What we choose here is bit different though. Let’s start with the data types we use.
-
-
type dr = {
- mutable p: float;
- mutable a: float ref;
- mutable adj_fun : float ref -> (float * dr) list -> (float * dr) list
-}
-
-let primal dr = dr.p
-let adjoint dr = dr.a
-let adj_fun dr = dr.adj_fun
-
The p is for primal while a stands for adjoint. It’s easy to understand. The adj_fun is a bit tricky. Let’s see an example:
-
-
let sin_ad dr =
- let p = primal dr in
- let p' = Owl_maths.sin p in
- let adjfun' ca t =
- let r = !ca *. (Owl_maths.cos p) in
- (r, dr) :: t
- in
- {p=p'; a=ref 0.; adj_fun=adjfun'}
-
It’s an implementation of sin operation. The adj_fun here can be understood as a placeholder for the adjoint value we don’t know yet in the forward pass. The t is a stack of intermediate nodes to be processed in the backward process. It says that, if I have the adjoint value ca, I can then get the new adjoint value of my parents r. This result, together with the original data dr, is pushed to the stack t. This stack is implemented in OCaml list.
-Let’s then look at the mul operation with two variables:
-
-
let mul_ad dr1 dr2 =
- let p1 = primal dr1 in
- let p2 = primal dr2 in
-
- let p' = Owl_maths.mul p1 p2 in
- let adjfun' ca t =
- let r1 = !ca *. p2 in
- let r2 = !ca *. p1 in
- (r1, dr1) :: (r2, dr2) :: t
- in
- {p = p'; a = ref 0.; adj_fun = adjfun'}
-
The difference is that, this time both of its parents are added to the task stack. For the input data, we need a helper function:
-
-
let make_reverse v =
- let a = ref 0. in
- let adj_fun _a t = t in
- {p=v; a; adj_fun}
-
With this function, we can perform the forward pass like this:
-
-
let x = make_reverse 1.
->val x : dr = {p = 1.; a = {contents = 0.}; adj_fun = <fun>}
-let y = make_reverse 2.
->val y : dr = {p = 2.; a = {contents = 0.}; adj_fun = <fun>}
-let v = mul_ad (sin_ad x) y
->val v : dr = {p = 1.68294196961579301; a = {contents = 0.}; adj_fun = <fun>}
-
-
After the forward pass, we have the primal values at each intermediate node, but their adjoint values are all set to zero, since we don’t know them yet. And we have this adjoin function. Noting that executing this function would create a list of past computations, which in turn contains its own adj_fun. This resulting adj_fun remembers all the required information, and know we need to recursively calculate the adjoint values we want.
-
-
let rec reverse_push xs =
- match xs with
- | [] -> ()
- | (v, dr) :: t ->
- let aa = adjoint dr in
- let adjfun = adj_fun dr in
- aa := !aa +. v;
- let stack = adjfun aa t in
- reverse_push stack
-
The reverse_push does exactly that. Starting from a list, it gets the top element dr, gets the adjoint value we already calculated aa, updates it with v, and then gets the adj_fun. Now that we know the adjoint value, we can use that as input parameter to the adj_fun to execute the data of current task and recursively execute more nodes until the task stack is empty.
-Now, let’s add some other required operations basically by copy and paste:
-
-
let exp_ad dr =
- let p = primal dr in
- let p' = Owl_maths.exp p in
- let adjfun' ca t =
- let r = !ca *. (Owl_maths.exp p) in
- (r, dr) :: t
- in
- {p=p'; a=ref 0.; adj_fun=adjfun'}
-
-
-let add_ad dr1 dr2 =
- let p1 = primal dr1 in
- let p2 = primal dr2 in
- let p' = Owl_maths.add p1 p2 in
- let adjfun' ca t =
- let r1 = !ca in
- let r2 = !ca in
- (r1, dr1) :: (r2, dr2) :: t
- in
- {p = p'; a = ref 0.; adj_fun = adjfun'}
-
-
-let div_ad dr1 dr2 =
- let p1 = primal dr1 in
- let p2 = primal dr2 in
-
- let p' = Owl_maths.div p1 p2 in
- let adjfun' ca t =
- let r1 = !ca /. p2 in
- let r2 = !ca *. (-.p1) /. (p2 *. p2) in
- (r1, dr1) :: (r2, dr2) :: t
- in
- {p = p'; a = ref 0.; adj_fun = adjfun'}
-
We can express the differentiation function diff with the reverse mode, with first a forward pass and then a backward pass.
-
-
let diff f =
- let f' x =
- (* forward pass *)
- let r = f x in
- (* backward pass *)
- reverse_push [(1., r)];
- (* get result values *)
- let x0, x1 = x in
- primal x0, !(adjoint x0), primal x1, !(adjoint x1)
- in
- f'
-
Now we can do the calculation, which are the same as before, and the only difference is the way to build constant values.
-
-
let x1 = make_reverse 1.
->val x1 : dr = {p = 1.; a = {contents = 0.}; adj_fun = <fun>}
-let x0 = make_reverse 1.
->val x0 : dr = {p = 1.; a = {contents = 0.}; adj_fun = <fun>}
-let f x =
- let x0, x1 = x in
- let v2 = sin_ad x0 in
- let v3 = mul_ad x0 x1 in
- let v4 = add_ad v2 v3 in
- let v5 = make_reverse 1. in
- let v6 = exp_ad v4 in
- let v7 = make_reverse 1. in
- let v8 = add_ad v5 v6 in
- let v9 = div_ad v7 v8 in
- v9
->val f : dr * dr -> dr = <fun>
-
-
Now let’s do the differentiation:
-
-
let pri_x0, adj_x0, pri_x1, adj_x1 = diff f (x0, x1)
->val pri_x0 : float = 1.
->val adj_x0 : float = -0.181974376561731321
->val pri_x1 : float = 1.
->val adj_x1 : float = -0.118141988016545588
-
-
Again, their adjoint values are just as expected.
-
-
-Unified Implementations
-We have shown how to implement forward and reverse AD from scratch separately. But in the real world applications, we often need a system that supports both differentiation modes. How can we build it then? We start with combining the previous two record data types df and dr into a new data type t and its related operations:
-
-
type t =
- | DF of float * float
- | DR of float * float ref * adjoint
-
-and adjoint = float ref -> (float * t) list -> (float * t) list
-
-let primal = function
- | DF (p, _) -> p
- | DR (p, _, _) -> p
-
-let tangent = function
- | DF (_, t) -> t
- | DR (_, _, _) -> failwith "error: no tangent for DR"
-
-let adjoint = function
- | DF (_, _) -> failwith "error: no adjoint for DF"
- | DR (_, a, _) -> a
-
-
-let make_forward p a = DF (p, a)
-
-let make_reverse p =
- let a = ref 0. in
- let adj_fun _a t = t in
- DR (p, a, adj_fun)
-
-let rec reverse_push xs =
- match xs with
- | [] -> ()
- | (v, x) :: t ->
- (match x with
- | DR (_, a, adjfun) ->
- a := !a +. v;
- let stack = adjfun a t in
- reverse_push stack
- | _ -> failwith "error: unsupported type")
-
Now we can operate on one unified data type. Based on this new data type, we can then combine the forward and reverse mode into one single function, using a match clause.
-
-
let sin_ad x =
- let ff = Owl_maths.sin in
- let df p t = (Owl_maths.cos p) *. t in
- let dr p a = !a *. (Owl_maths.cos p) in
- match x with
- | DF (p, t) ->
- let p' = ff p in
- let t' = df p t in
- DF (p', t')
- | DR (p, _, _) ->
- let p' = ff p in
- let adjfun' a t =
- let r = dr p a in
- (r, x) :: t
- in
- DR (p', ref 0., adjfun')
-
The code is mostly taken from the previous two implementations, so should be not very alien to you now. Similarly we can also build the multiplication operator:
-
-
let mul_ad xa xb =
- let ff = Owl_maths.mul in
- let df pa pb ta tb = pa *. tb +. ta *. pb in
- let dr pa pb a = !a *. pb, !a *. pa in
- match xa, xb with
- | DF (pa, ta), DF (pb, tb) ->
- let p' = ff pa pb in
- let t' = df pa pb ta tb in
- DF (p', t')
- | DR (pa, _, _), DR (pb, _, _) ->
- let p' = ff pa pb in
- let adjfun' a t =
- let ra, rb = dr pa pb a in
- (ra, xa) :: (rb, xb) :: t
- in
- DR (p', ref 0., adjfun')
- | _, _ -> failwith "unsupported op"
-
Now before moving forward, let’s pause and think about what’s so different among different math functions. First, they may take different number of input arguments; they could be unary functions or binary functions. Second, they have different computation rules. Specifically, three type of computations are involved: ff, which computes the primal value; df, which computes the tangent value; and dr, which computes the adjoint value. The rest are mostly fixed.
-Based on this observation, we can utilise the first-class citizen in OCaml, the “module”, to reduce a lot of copy and paste in our code. We can start with two types of modules: unary and binary:
-
-
module type Unary = sig
- val ff : float -> float
-
- val df : float -> float -> float
-
- val dr : float -> float ref -> float
-end
-
-module type Binary = sig
- val ff : float -> float -> float
-
- val df : float -> float -> float -> float -> float
-
- val dr : float -> float -> float ref -> float * float
-end
-
They express both points of difference: first, the two modules differentiate between unary and binary ops; second, each module represents the three core operations: ff, df, and dr. We can focus on the computation logic of each computation in each module:
-
-
module Sin = struct
- let ff = Owl_maths.sin
- let df p t = (Owl_maths.cos p) *. t
- let dr p a = !a *. (Owl_maths.cos p)
-end
-
-module Exp = struct
- let ff = Owl_maths.exp
- let df p t = (Owl_maths.exp p) *. t
- let dr p a = !a *. (Owl_maths.exp p)
-end
-
-module Mul = struct
- let ff = Owl_maths.mul
- let df pa pb ta tb = pa *. tb +. ta *. pb
- let dr pa pb a = !a *. pb, !a *. pa
-end
-
-module Add = struct
- let ff = Owl_maths.add
- let df _pa _pb ta tb = ta +. tb
- let dr _pa _pb a = !a, !a
-end
-
-module Div = struct
- let ff = Owl_maths.div
- let df pa pb ta tb = (ta *. pb -. tb *. pa) /. (pb *. pb)
- let dr pa pb a =
- !a /. pb, !a *. (-.pa) /. (pb *. pb)
-end
-
Now we can provide a template to build math functions:
-
-
let unary_op (module U: Unary) = fun x ->
- match x with
- | DF (p, t) ->
- let p' = U.ff p in
- let t' = U.df p t in
- DF (p', t')
- | DR (p, _, _) ->
- let p' = U.ff p in
- let adjfun' a t =
- let r = U.dr p a in
- (r, x) :: t
- in
- DR (p', ref 0., adjfun')
-
-
-let binary_op (module B: Binary) = fun xa xb ->
- match xa, xb with
- | DF (pa, ta), DF (pb, tb) ->
- let p' = B.ff pa pb in
- let t' = B.df pa pb ta tb in
- DF (p', t')
- | DR (pa, _, _), DR (pb, _, _) ->
- let p' = B.ff pa pb in
- let adjfun' a t =
- let ra, rb = B.dr pa pb a in
- (ra, xa) :: (rb, xb) :: t
- in
- DR (p', ref 0., adjfun')
- | _, _ -> failwith "unsupported op"
-
Each template accepts a module, and then returns the function we need. Let’s see how it works with concise code.
-
-
let sin_ad = unary_op (module Sin : Unary)
-
-let exp_ad = unary_op (module Exp : Unary)
-
-let mul_ad = binary_op (module Mul : Binary)
-
-let add_ad = binary_op (module Add: Binary)
-
-let div_ad = binary_op (module Div : Binary)
-
As you can expect, the diff function can also be implemented in a combined way. In this implementation we focus on the tangent and adjoint value of x0 only.
-
-
let diff f =
- let f' x =
- let x0, x1 = x in
- match x0, x1 with
- | DF (_, _), DF (_, _) ->
- f x |> tangent
- | DR (_, _, _), DR (_, _, _) ->
- let r = f x in
- reverse_push [(1., r)];
- !(adjoint x0)
- | _, _ -> failwith "error: unsupported operator"
- in
- f'
-
That’s all. We can move on once again to our familiar examples.
-
-
let x0 = make_forward 1. 1.
->val x0 : t = DF (1., 1.)
-let x1 = make_forward 1. 0.
->val x1 : t = DF (1., 0.)
-let f_forward x =
- let x0, x1 = x in
- let v2 = sin_ad x0 in
- let v3 = mul_ad x0 x1 in
- let v4 = add_ad v2 v3 in
- let v5 = make_forward 1. 0. in
- let v6 = exp_ad v4 in
- let v7 = make_forward 1. 0. in
- let v8 = add_ad v5 v6 in
- let v9 = div_ad v7 v8 in
- v9
->val f_forward : t * t -> t = <fun>
-diff f_forward (x0, x1)
->- : float = -0.181974376561731321
-
-
That’s just forward mode. With only tiny change of how the variables are constructed, we can also do the reverse mode.
-
-
let x0 = make_reverse 1.
->val x0 : t = DR (1., {contents = 0.}, <fun>)
-let x1 = make_reverse 1.
->val x1 : t = DR (1., {contents = 0.}, <fun>)
-let f_reverse x =
- let x0, x1 = x in
- let v2 = sin_ad x0 in
- let v3 = mul_ad x0 x1 in
- let v4 = add_ad v2 v3 in
- let v5 = make_reverse 1. in
- let v6 = exp_ad v4 in
- let v7 = make_reverse 1. in
- let v8 = add_ad v5 v6 in
- let v9 = div_ad v7 v8 in
- v9
->val f_reverse : t * t -> t = <fun>
-diff f_reverse (x0, x1)
->- : float = -0.181974376561731321
-
-
Once again, the results agree and are just as expected.
-
-
-
-Forward and Reverse Propagation API
-So far we have talked a lot about what is algorithmic differentiation and how it works, with theory, example illustration, and code. Now finally let’s turn to using it in Owl. Owl provides both numerical differentiation (in Numdiff.Generic module) and algorithmic differentiation (in Algodiff.Generic module). We have briefly used them in previous sections to validate the calculation results of our manual forward and reverse differentiation examples.
-Algorithmic Differentiation is a core module built in Owl, which is one of Owl’s special features among other similar numerical libraries. Algodiff.Generic is a functor that accepts a Ndarray modules. By plugging in Dense.Ndarray.S and Dense.Ndarray.D modules we can have AD modules that supports float32 and float64 precision respectively.
-
-
module S = Owl_algodiff_generic.Make (Owl_algodiff_primal_ops.S)
-module D = Owl_algodiff_generic.Make (Owl_algodiff_primal_ops.D)
-
This Owl_algodiff_primal_ops module here might seem unfamiliar to you, but in essence it is mostly an alias of the Ndarray module, with certain matrix and linear algebra functions added in.
-We will mostly use the double precision Algodiff.D module, but of course using other choices is also perfectly fine.
-
-Expressing Computation
-Let’s look at the the previous example of [@eq:algodiff:example], and express it with the AD module. Normally, the code below should do.
-
-
open Owl
-
-let f x =
- let x0 = Mat.get x 0 0 in
- let x1 = Mat.get x 0 1 in
- Owl_maths.(1. /. (1. +. exp (sin x0 +. x0 *. x1)))
-
This function accepts a vector and returns a float value, which is exactly what we are looking for. However, the problem is that we cannot directly differentiate this programme. Instead, we need to do some minor but important change:
-
-
module AD = Algodiff.D
-
-let f x =
- let x0 = AD.Mat.get x 0 0 in
- let x1 = AD.Mat.get x 0 1 in
- AD.Maths.((F 1.) / (F 1. + exp (sin x0 + x0 * x1)))
-
This function looks very similar, but now we are using the operators provided by the AD module, including the get operation and math operations. In AD, all the input/output are of type AD.t. There is no difference between scalar, matrix, or ndarray for the type checking.
-The F is special packing mechanism in AD. It makes a type t float. Think about wrapping a float number inside a container that can be recognised in this factory called “AD”. And then this factory can produce the differentiation result you want. The Arr operator is similar. It wraps an ndarray (or matrix) inside this same container. And as you can guess, there are also unpacking mechanisms. When this AD factory produces some result, to see the result you need to first unwrap this container with the functions unpack_flt and unpack_arr. For example, we can directly execute the AD functions, and the results need to be unpacked before being used.
-
-
open AD
-
-# let input = Arr (Dense.Matrix.D.ones 1 2)
-# let result = f input |> unpack_flt
-val result : float = 0.13687741466075895
-
Despite this slightly cumbersome number packing mechanism, we can now perform the forward and reverse propagation on this computation in Owl, as will be shown next.
-
-
-Example: Forward Mode
-The forward mode is implemented with the make_forward and tangent function:
-
-
val make_forward : t -> t -> int -> t
-
-val tangent : t -> t
-
The forward process is straightforward.
-
-
open AD
-
-# let x = make_forward input (F 1.) (tag ());; (* seed the input *)
-# let y = f x;; (* forward pass *)
-# let y' = tangent y;; (* get all derivatives *)
-
All the derivatives are ready whenever the forward pass is finished, and they are stored as tangent values in y. We can retrieve the derivatives using tangent function.
-
-
-Example: Reverse Mode
-The reverse mode consists of two parts:
-
-
val make_reverse : t -> int -> t
-
-val reverse_prop : t -> t -> unit
-
Let’s look at the code snippet below.
-
-
open AD
-
-# let x = Mat.ones 1 2;; (* generate random input *)
-# let x' = make_reverse x (tag ());; (* init the reverse mode *)
-# let y = f x';; (* forward pass to build computation graph *)
-# let _ = reverse_prop (F 1.) y;; (* backward pass to propagate error *)
-# let y' = adjval x';; (* get the gradient value of f *)
-
-- : A.arr =
- C0 C1
-R0 -0.181974 -0.118142
-
The make_reverse function does two things for us: 1) wrapping x into type t that Algodiff can process 2) generating a unique tag for the input so that input numbers can have nested structure. By calling f x', we construct the computation graph of f and the graph structure is maintained in the returned result y. Finally, reverse_prop function propagates the error back to the inputs. In the end, the gradient of f is stored in the adjacent value of x', and we can retrieve that with adjval function. The result agrees with what we have calculated manually.
-
-
-
-High-Level APIs
-What we have seen is the basic of AD modules. There might be cases you do need to operate these low-level functions to write up your own applications (e.g., implementing a neural network), then knowing the mechanisms behind the scene is definitely a big plus. However, using these complex low level function hinders daily use of algorithmic differentiation in numerical computation task. In reality, you don’t really need to worry about forward or reverse mode if you simply use high-level APIs such as diff, grad, hessian, etc. They are all built on the forward or reverse mode that we have seen, but provide clean interfaces, making a lot of details transparent to users. In this section we will introduce how to use these high level APIs.
-
-Derivative and Gradient
-The most basic and commonly used differentiation functions is used for calculating the derivative of a function. The AD module provides diff function for this task. Given a function f that takes a scalar as input and also returns a scalar value, we can calculate its derivative at a point x by diff f x, as shown in this function signature.
-
-
val diff : (t -> t) -> t -> t
-
The physical meaning of derivative is intuitive. The function f can be expressed as a curve in a cartesian coordinate system, and the derivative at a point is the tangent on a function at this point. It also indicate the rate of change at this point.
-Suppose we define a function f0 to be the triangular function tanh, we can calculate its derivative at position \(x=0.1\) by simply calling:
-
-
open Algodiff.D
-
-let f0 x = Maths.(tanh x)
-let d = diff f0 (F 0.1)
-
Moreover, the AD module is much more than that; we can easily chain multiple diff together to get a function’s high order derivatives. For example, we can get the first to fourth order derivatives of f0 by using the concise code below.
-
-
let f0 x = Maths.(tanh x);;
-let f1 = diff f0;;
-let f2 = diff f1;;
-let f3 = diff f2;;
-let f4 = diff f3;;
-
We can further plot these five functions using Owl, and the result is show in [@fig:algodiff:plot00].
-
-
let map f x = Owl.Mat.map (fun a -> a |> pack_flt |> f |> unpack_flt) x;;
-
-let x = Owl.Mat.linspace (-4.) 4. 200;;
-let y0 = map f0 x;;
-let y1 = map f1 x;;
-let y2 = map f2 x;;
-let y3 = map f3 x;;
-let y4 = map f4 x;;
-
-let h = Plot.create "plot_00.png" in
-Plot.plot ~h x y0;
-Plot.plot ~h x y1;
-Plot.plot ~h x y2;
-Plot.plot ~h x y3;
-Plot.plot ~h x y4;
-Plot.output h;;
-
 Higher order derivatives
-
-
Higher order derivatives
-
-If you want, you can play with other functions, such as \(\frac{1-e^{-x}}{1+e^{-x}}\) to see what its derivatives look like.
-A close-related idea to derivative is the gradient. As we have introduced in [@eq:algodiff:grad], gradient generalises derivatives to multivariate functions. Therefore, for a function that accepts a vector (where each element is a variable) and returns a scalar, we can use the grad function to find its gradient at a point. Imagine a 3D surface. At each points on this surface, a gradient consists of three element that each represents the derivative along the x, y or z axis. This vector shows the direction and magnitude of maximum change of a multivariate function.
-One important application of gradient is the gradient descent, a widely used technique to find minimum values on a function. The basic idea is that, at any point on the surface, we calculate the gradient to find the current direction of maximal change at this point, and move the point along this direction by a small step, and then repeat this process until the point cannot be further moved. We will talk about it in detail in the Regression and Optimisation chapters in our book.
-
-
-Jacobian
-Just like gradient extends derivative, the gradient can also be extended to the Jacobian matrix. The grad can be applied on functions with vector as input and scalar as output. The jacobian function on the other hand, deals with functions that has both input and output of vectors. Suppose the input vector is of length \(n\), and contains \(m\) output variables, the jacobian matrix is defined as:
-\[ \mathbf{J}(y) = \left[ \begin{matrix} \frac{\partial~y_1}{\partial~x_1} & \frac{\partial~y_1}{\partial~x_1} & \ldots & \frac{\partial~y_1}{\partial~x_n} \\ \frac{\partial~y_2}{\partial~x_0} & \frac{\partial~y_2}{\partial~x_1} & \ldots & \frac{\partial~y_2}{\partial~x_n} \\ \vdots & \vdots & \ldots & \vdots \\ \frac{\partial~y_m}{\partial~x_0} & \frac{\partial~y_m}{\partial~x_1} & \ldots & \frac{\partial~y_m}{\partial~x_n} \end{matrix} \right]\]
-The intuition of Jacobian is similar to that of the gradient. At a particular point in the domain of the target function, If you give it a small change in the input vector, the Jacobian matrix shows how the output vector changes. One application field of Jacobian is in the analysis of dynamical systems. In a dynamic system \(\vec{y}=f(\vec{x})\), suppose \(f: \mathbf{R}^n \rightarrow \mathbf{R}^m\) is differentiable and its jacobian is \(\mathbf{J}\).
-According to the Hartman-Grobman theorem, the stability of a dynamic system near a stationary point is decided by the eigenvalues of \(\mathbf{J}\). It is stable if all the eigenvalues have negative real parts, otherwise its unstable, with the exception that when the largest real part of the eigenvalues is zero. In that case, the stability cannot be decided by eigenvalues.
-Let’s revise the two-body problem from Ordinary Differential Equation Chapter. This dynamic system is described by a group of differential equations:
-\[y_0^{'} = y_2,\] \[y_1^{'} = y_3,\] \[y_2^{'} = -\frac{y_0}{r^3},\] {#eq:algodiff:twobody_system} \[y_3^{'} = -\frac{y_1}{r^3},\]
-We can express this system with code:
-
-
open Algodiff.D
-
-let f y =
- let y0 = Mat.get y 0 0 in
- let y1 = Mat.get y 0 1 in
- let y2 = Mat.get y 0 2 in
- let y3 = Mat.get y 0 3 in
-
- let r = Maths.(sqrt ((sqr y0) + (sqr y1))) in
- let y0' = y2 in
- let y1' = y3 in
- let y2' = Maths.( neg y0 / pow r (F 3.)) in
- let y3' = Maths.( neg y1 / pow r (F 3.)) in
-
- let y' = Mat.ones 1 4 in
- let y' = Mat.set y' 0 0 y0' in
- let y' = Mat.set y' 0 1 y1' in
- let y' = Mat.set y' 0 2 y2' in
- let y' = Mat.set y' 0 3 y3' in
- y'
-
For this functions \(f: \mathbf{R}^4 \rightarrow \mathbf{R}^4\), we can then find its Jacobian matrix. Suppose the given point of interest of where all four input variables equals one. Then we can use the Algodiff.D.jacobian function in this way.
-
-
let y = Mat.ones 1 4
-let result = jacobian f y
-
-let j = unpack_arr result;;
-- : A.arr =
-
- C0 C1 C2 C3
-R0 0 0 1 0
-R1 0 0 0 1
-R2 0.176777 0.53033 0 0
-R3 0.53033 0.176777 0 0
-
Next, we find the eigenvalues of this jacobian matrix with the Linear Algebra module in Owl that we have introduced in previous chapter.
-
-
let eig = Owl_linalg.D.eigvals j
-
-val eig : Owl_dense_matrix_z.mat =
-
- C0 C1 C2 C3
-R0 (0.840896, 0i) (-0.840896, 0i) (0, 0.594604i) (0, -0.594604i)
-
It turns out that one of the eigenvalue is real and positive, so at current point the system is unstable.
-
-
-Hessian and Laplacian
-Another way to extend the gradient is to find the second order derivatives of a multivariate function which takes \(n\) input variables and outputs a scalar. Its second order derivatives can be organised as a matrix:
-\[ \mathbf{H}(y) = \left[ \begin{matrix} \frac{\partial^2~y_1}{\partial~x_1^2} & \frac{\partial^2~y_1}{\partial~x_1~x_2} & \ldots & \frac{\partial^2~y_1}{\partial~x_1~x_n} \\ \frac{\partial^2~y_2}{\partial~x_2~x_1} & \frac{\partial^2~y_2}{\partial~x_2^2} & \ldots & \frac{\partial^2~y_2}{\partial~x_2~x_n} \\ \vdots & \vdots & \ldots & \vdots \\ \frac{\partial^2~y_m}{\partial^2~x_n~x_1} & \frac{\partial^2~y_m}{\partial~x_n~x_2} & \ldots & \frac{\partial^2~y_m}{\partial~x_n^2} \end{matrix} \right]\]
-This matrix is called the Hessian Matrix. As an example of using it, consider the newton’s method. It is also used for solving the optimisation problem, i.e. to find the minimum value on a function. Instead of following the direction of the gradient, the newton method combines gradient and second order gradients: \(\frac{\nabla~f(x_n)}{\nabla^{2}~f(x_n)}\). Specifically, starting from a random position \(x_0\), and it can be iteratively updated by repeating this procedure until converge, as shown in [@eq:algodiff:newtons].
-\[x_{n+1} = x_n - \alpha~\mathbf{H}^{-1}\nabla~f(x_n)\] {#eq:algodiff:newtons}
-This process can be easily represented using the Algodiff.D.hessian function.
-
-
open Algodiff.D
-
-let rec newton ?(eta=F 0.01) ?(eps=1e-6) f x =
- let g = grad f x in
- let h = hessian f x in
- if (Maths.l2norm' g |> unpack_flt) < eps then x
- else newton ~eta ~eps f Maths.(x - eta * g *@ (inv h))
-
We can then apply this method on a two dimensional triangular function to find one of the local minimum values, staring from a random initial point. Note that here the functions has to take a vector as input and output a scalar. We will come back to this method in the in Optimisation chapter with more details.
-
-
let _ =
- let f x = Maths.(cos x |> sum') in
- newton f (Mat.uniform 1 2)
-
Another useful and related function is laplacian, it calculate the Laplacian operator \(\nabla^2~f\), which is the the trace of the Hessian matrix:
-\[\nabla^2~f=trace(H_f)= \sum_{i=1}^{n}\frac{\partial^2f}{\partial~x_i^2}.\]
-In Physics, the Laplacian can represent the flux density of the gradient flow of a function, e.g. the moving rate of a chemical in a fluid. Therefore, differential equations that contains Laplacian are frequently used in many fields to describe physical systems, such as the gravitational potentials, the fluid flow, wave propagation, and electric field, etc.
-
-
-Other APIs
-Besides, there are also many helper functions, such as jacobianv for calculating jacobian vector product; diff' for calculating both f x and diff f x, etc. They will come handy in certain cases for the programmers. Besides the functions we have already introduced, the complete list of APIs can be found in the table below.
-
-List of other APIs in the AD module of Owl {#tbl:algodiff:apis}
-
-
-
-
-
-
-
-
-
-diff' |
-similar to diff, but return (f x, diff f x) |
-
-
-grad' |
-similar to grad, but return (f x, grad f x) |
-
-
-jacobian' |
-similar to jacobian, but return (f x, jacobian f x) |
-
-
-jacobianv |
-jacobian vector product of f : (vector -> vector) at x along v; it calcultes (jacobian x) v |
-
-
-jacobianv' |
-similar to jacobianv, but return (f x, jacobianv f x) |
-
-
-jacobianTv |
-it calculates transpose ((jacobianv f x v)) |
-
-
-jacobianTv' |
-similar to jacobianTv, but return (f x, transpose (jacobianv f x v)) |
-
-
-hessian' |
-hessian vector product of f : (scalar -> scalar) at x along v; it calculates (hessian x) v |
-
-
-hessianv' |
-similar to hessianv, but return (f x, hessianv f x v) |
-
-
-laplacian' |
-similar to laplacian, but return (f x, laplacian f x) |
-
-
-gradhessian |
-return (grad f x, hessian f x), f : (scalar -> scalar) |
-
-
-gradhessian' |
-return (f x, grad f x, hessian f x) |
-
-
-gradhessianv |
-return (grad f x v, hessian f x v) |
-
-
-gradhessianv' |
-return (f x, grad f x v, hessian f x v) |
-
-
-
-Differentiation is an important topic in scientific computing, and therefore is not limited to only this chapter in our book. As we have already shown in previous examples, we use AD in the newton method to find extreme values in optimisation problem in the Optimisation chapter. It is also used in the Regression chapter to solve the linear regression problem with gradient descent. More importantly, the algorithmic differentiation is core module in many modern deep neural libraries such as PyTorch. The neural network module in Owl benefit a lot from our solid AD module. We will elaborate these aspects in the following chapters. Stay tuned!
-
-
-
-Internal of Algorithmic Differentiation
-
-Go Beyond Simple Implementation
-Now that you know the basic implementation of forward and reverse differentiation, and you have also seen the high level APIs that Owl provides. You might be wondering, how are these APIs implemented in Owl?
-It turns out that, the simple implementations we have are not very far away from the industry-level implementations in Owl. There are of course many details that need to be taken care of in Owl, but by now you should be able to understand the gist of it. Without digging too deep into the code details, in this section we give an overview of some of the key differences between the Owl implementation and the simple version we built in the previous sections.
-
- Architecture of the AD module
-
-
Architecture of the AD module
-
-The [@fig:algodiff:architecture] shows the structure of AD module in Owl, and they will be introduced one by one below. Let’s start with the type definition.
-
-
type t =
- | F of A.elt
- | Arr of A.arr
- (* primal, tangent, tag *)
- | DF of t * t * int
- (* primal, adjoint, op, fanout, tag, tracker *)
- | DR of t * t ref * op * int ref * int * int ref
-
- and adjoint = t -> t ref -> (t * t) list -> (t * t) list
-
- and register = t list -> t list
-
- and label = string * t list
-
- and op = adjoint * register * label
-
You will notice some differences. First, besides DF and DR, it also contains two constructors: F and Arr. This points out one shortcoming of our simple implementation: we cannot process ndarray as input, only float. That’s why, if you look back at how our computation is constructed, we have to explicitly say that the computation takes two variable as input. In a real-world application, we only need to pass in a 1x2 vector as input.
-You can also note that some extra information fields are included in the DF and DR data types. The most important one is tag, it is mainly used to solve the problem of high order derivative and nested forward and backward mode. This problem is called perturbation confusion and is important in any AD implementation. Here we only scratch the surface of this problem. Think about this: what if we want to compute the derivative of:
-\[f(x) = x\frac{d(x+y)}{dy},\]
-i.e. a function that contains another derivative function? It’s simple, since \(\frac{d(x+y)}{dy} = 1\), so \(f'(x) = x' = 1\). Elementary. There is no way we can do it wrong, even with our strawman AD engine, right?
-Well, not exactly. Let’s follow our previous simple implementation:
-
-
let diff f x =
- match x with
- | DF (_, _) ->
- f x |> tangent
- | DR (_, _, _) ->
- let r = f x in
- reverse_push [(1., r)];
- !(adjoint x)
->val diff : (t -> t) -> t -> float = <fun>
-let f x =
- let g = diff (fun y -> add_ad x y) in
- mul_ad x (make_forward (g (make_forward 2. 1.)) 1.)
->val f : t -> t = <fun>
-diff f (make_forward 2. 1.)
->- : float = 4.
-
-
Hmm, the result is 3 at point \((x=2, y=2)\) but the result should be 1 at any point as we have calculated, so what has gone wrong?
-Notice that x=DF(2,1). The tangent value equals to 1, which means that \(\frac{dx}{dx}=1\). Now if we continue to use this same x value in function g, whose variable is y, the same x=DF(2,1) can be translated by the AD engine as \(\frac{dx}{dy}=1\), which is apparently wrong. Therefore, when used within function g, x should actually be treated as DF(2,0).
-The tagging technique is proposed to solve this nested derivative problem. The basic idea is to distinguish derivative calculations and their associated attached values by using a unique tag for each application of the derivative operator. More details of method is explained in [@siskind2005perturbation].
-Now we move on to a higher level. Its structure should be familiar to you now. The builder module abstract out the general process of forward and reverse modes, while the ops module contains all the specific calculation methods for each operations. Keep in mind that not all operations can follow exact math rules to perform differentiation. For example, what is the tangent and adjoint of the convolution or concatenation operations? These are all included in the ops.ml.
-We have shown how the unary and binary operations can be built by providing two builder modules. But of course there are many operators that have other type of signatures. Owl abstracts more operation types according to their number of input variables and output variables. For example, the qr operations calculates QR decomposition of an input matrix. This operation uses the SIPO (single-input-pair-output) builder template.
-In ops, each operation specifies three kinds of functions for calculating the primal value (ff), the tangent value (df), and the adjoint value (dr). However, actually some variants are required. In our simple examples, all the constants are either DF or DR, and therefore we have to define two different functions f_forward and f_reverse, even though only the definition of constants are different. Now that the float number is included in the data type t, we can define only one computation function for both modes:
-
-
let f_forward x =
- let x0, x1 = x in
- let v2 = sin_ad x0 in
- let v3 = mul_ad x0 x1 in
- let v4 = add_ad v2 v3 in
- let v5 = F 1. in (* change *)
- let v6 = exp_ad v4 in
- let v7 = F 1. in (* change *)
- let v8 = add_ad v5 v6 in
- let v9 = div_ad v7 v8 in
- v9
-
Now, we need to consider the question: how to compute DR and F data types together? To do that, we need to consider more cases in an operation. For example, in the previous implementation, one multiplication use three functions:
-
-
module Mul = struct
- let ff a b = Owl_maths.mul a b
- let df pa pb ta tb = pa *. tb +. ta *. pb
- let dr pa pb a = !a *. pb, !a *. pa
-end
-
But now things get more complicated. For ff a b, we need to consider, e.g. what if a is float and b is an ndarray, or vice versa. For df and dr, we need to consider what happens if one of the input is constant (F or Arr). The builder module also has to take these factors into consideration accordingly.
-Finally, in the reverse module (Owl_algodiff_reverse), we have the reverse_push functions. Compared to the simple implementation, it performs an extra shrink step. This step checks adjoint a and its update v, ensuring rank of a must be larger than or equal with rank of v. Also, the initialisation of the computation is required. An extra reverse_reset functions is actually required before the reverse propagation begins to reset all adjoint values to the initial zero values.
-Above these parts are the high level APIs. One thing we need to notice is that although diff functions looks straightforward to be implemented using the forward and backward mode, the same cannot be said of other functions, especially jacobian. Another thing is that, our simple implementation does not support multiple precisions. It is solved by functors in Owl. In Algodiff.Generic, all the APIs are encapsulated in a module named Make. This module takes in an ndarray-like module and generate AD modules with corresponding precision. If it accepts a Dense.Ndarray.S module, it generate AD modules of single precision; if it is Dense.Ndarray.D passed in, the functor generates AD module that uses double precision. (To be precise, this description is not quite correct; the required functions actually has to follow the signatures specified in Owl_types_ndarray_algodiff.Sig, which also contains operation about scalar, matrix, and linear algebra, besides ndarray operations. As we have seen previously, the input modules here are acutally Owl_algodiff_primal_ops.S/D, the wrapper modules for Ndarray.)
-
-
-Extend AD module
-The module design shown above brings one large benefit: it is very flexible in supporting adding new operations on the fly. Let’s look at an example: suppose the Owl does not provide the operation sin in AD module, and to finish our example in [@eq:algodiff:example], what can we do? We can use the Builder module in AD.
-
-
open Algodiff.D
-
-module Sin = struct
- let label = "sin"
- let ff_f a = F A.Scalar.(sin a)
- let ff_arr a = Arr A.(sin a)
- let df _cp ap at = Maths.(at * cos ap)
- let dr a _cp ca = Maths.(!ca * cos (primal a))
-end
-
As a user, you need to know how the three types of functions work for the new operation you want to add. These are defined in a module called Sin here. This module can be passed as parameters to the builder to build a required operation. We call it sin_ad to make it different from what the AD module actually provides.
-
-
let sin_ad = Builder.build_siso (module Sin : Builder.Siso)
-
The siso means “single input, single output”. That’s all! Now we can use this function as if it is a native operation. You will find that this new operator works seamlessly with existing ones.
-
-
let f x =
- let x1 = Mat.get x 0 0 in
- let x2 = Mat.get x 0 1 in
- Maths.(div (F 1.) (F 1. + exp (x1 * x2 + (sin_ad x1))))
->val f : t -> t = <fun>
-let x = Mat.ones 1 2
->val x : t = [Arr(1,2)]
-let _ = grad f x |> unpack_arr
->- : A.arr =
-> C0 C1
->R0 -0.181974 -0.118142
-
-
Lazy Evaluation
-Using the Builder enables users to build new operations conveniently, and it greatly improve the clarity of code. However, with this mechanism comes a new problem: efficiency. Imagine that a large computation that consists of hundreds and thousands of operations, with a function occurs many times in these operations. (Though not discussed yet, in a neural network which utilises AD, it is quite common to create a large computation where basic functions such as add and mul are repeated tens and hundreds of times.) With the current Builder approach, every time this operation is used, it has to be created by the builder again. This is apparently not efficient. We need some mechanism of caching. This is where the lazy evaluation in OCaml comes to help.
-
-
val lazy: 'a -> 'a lazy_t
-
-module Lazy :
- sig
- type 'a t = 'a lazy_t
- val force : 'a t -> 'a
- end
-
As shown in the code above, OCaml provides a built-in function lazy that accept an input of type 'a and returns a 'a lazy_t object. It is a value of type 'a whose computation has been delayed. This lazy expression won’t be evaluated until it is called by Lazy.force. The first time it is called by Lazy.force, the expresion is evaluted and the result is saved; and thereafter every time it is called by Lazy.force, the saved results will be returned without evaluation.
-Here is an example:
-
-
let x = Printf.printf "hello world!"; 42
->hello world!
->val x : int = 42
-let lazy_x = lazy (Printf.printf "hello world!"; 42)
->val lazy_x : int lazy_t = <lazy>
-let _ = Stdlib.Lazy.force lazy_x
->hello world!
->- : int = 42
-let _ = Stdlib.Lazy.force lazy_x
->- : int = 42
-let _ = Stdlib.Lazy.force lazy_x
->- : int = 42
-
-
In this example you can see that building lazy_x does not evaluate the content, which is delayed to the first Lazy.force. After that, ever time force is called, only the value is returned; the x itself, including the printf function, will not be evaluated.
-We can use this mechanism to improve the implementation of our AD code. Back to our previous section where we need to add a sin operation that the AD module supposedly “does not provide”. We can still do:
-
-
open Algodiff.D
-
-module Sin = struct
- let label = "sin"
- let ff_f a = F A.Scalar.(sin a)
- let ff_arr a = Arr A.(sin a)
- let df _cp ap at = Maths.(at * cos ap)
- let dr a _cp ca = Maths.(!ca * cos (primal a))
-end
-
This part is the same, but now we need to utilise the lazy evaluation:
-
-
let _sin_ad = lazy Builder.build_siso (module Sin : Builder.Siso)
-
-let sin_ad = Lazy.force _sin_ad
-
Int this way, regardless of how many times this sin function is called in a massive computation, the Builder.build_siso process is only invoked once.
-What we have talked about is the lazy evaluation at the compiler level, and do not mistake it with another kind of lazy evaluation that are also related with the AD. Think about that, instead of computing the specific numbers, each step accumulates on a graph, so that computation like primal, tangent, adjoint etc. all generate a graph as result, and evaluation of this graph can only be executed when we think it is suitable. This leads to delayed lazy evaluation. Remember that the AD functor takes an ndarray-like module to produce the Algodiff.S or Algodiff.D modules, and to do what we have described, we only need to plugin another ndarray-like module that returns graph instead of numerical value as computation result. This module is called the computation graph module. It is also a quite important idea, and we will talk about it in detail in the second part of this book.
-
-
-
-Summary
-In this chapter, we introduce the idea of algorithmic differentiation (AD) and how it works in Owl. First, we start with the classic chain rule in differentiation and different methods to do it, and the benefit of AD. Next, we use an example to introduce two basic modes in AD: the forward mode and the reverse mode. This section is followed by a step-by-step coding of a simple strawman AD engine using OCaml. You can see that the core idea of AD can be implemented with surprisingly simple code. Then we turn to the Owl side: first, how Owl support what we have done in the strawman implementation with the forward and reverse propagation APIs; next, how Owl provides various powerful high level APIs to enable users to directly perform AD. Finally, we give an in-depth introduction to the implementation of the AD module in Owl, including some details that enhance the simple strawman code, how to build user-defined AD computation, and using lazy evaluation to improve performance, etc. Hopefully, after finishing this chapter, you can have a solid understanding of both its theory and implementation.
-
-
-
- Next: Chapter 12Optimisation
\ No newline at end of file
diff --git a/docs/architecture.html b/docs/architecture.html
deleted file mode 100644
index cd7c80e..0000000
--- a/docs/architecture.html
+++ /dev/null
@@ -1,129 +0,0 @@
-Architecture Overview - Owl Online Tutorials
-Architecture Overview
-Owl is an emerging library developed in the OCaml language for scientific and engineering computing. It focuses on providing a comprehensive set of high-level numerical functions so that developers can quickly build up any data analytical applications. After over one-year intensive development and continuous optimisation, Owl has evolved into a powerful software system with competitive performance to mainstream numerical libraries. Meanwhile, Owl’s overall architecture remains simple and elegant. Its small code base can be easily managed by a small group of developers.
-In this chapter, we first present Owl’s design, core components, and its key functionality. We show that Owl benefits greatly from OCaml’s module system which not only allows us to write concise generic code with superior performance, but also leads to a very unique design to enable parallel and distributed computing. OCaml’s static type checking significantly reduces potential bugs and accelerates the development cycle. We also share the knowledge and lessons learnt from building up a full-fledge system for scientific computing with the functional programming community.
-
-Introduction
-Thanks to the recent advances in machine learning and deep neural networks, there is a huge demand on various numerical tools and libraries in order to facilitate both academic researchers and industrial developers to fast prototype and test their new ideas, then develop and deploy analytical applications at large scale. Take deep neural network as an example, Google invests heavily in TensorFlow while Facebook promotes their PyTorch. Beyond these libraries focusing on one specific numerical task, the interest on general purpose tools like Python and Julia also grows fast. Python has been one popular choice among developers for fast prototyping analytical applications. One important reason is because SciPy and NumPy two libraries, tightly integrated with other advanced functionality such as plotting, offer a powerful environment which lets developers write very concise code to finish complicated numerical tasks. As a result, even for the frameworks which were not originally developed in Python (such as Caffe and TensorFlow), they often provide Python bindings to take advantage of the existing numerical infrastructure in NumPy and SciPy.
-On the other hand, the supporting of basic scientific computing in OCaml is rather fragmented. There have been some initial efforts (e.g., Lacaml, Oml, Pareto, etc.), but their APIs are either too low-level to offer satisfying productivity, or the designs overly focus on a specific problem domain. Moreover, inconsistent data representation and careless use of abstract types make it difficult to pass data across different libraries. Consequently, developers often have to write a significant amount of boilerplate code just to finish rather trivial numerical tasks. As we can see, there is a severe lack of a general purpose numerical library in OCaml ecosystem. We believe OCaml per se is a good candidate for developing such a general purpose numerical library for two important reasons: 1) we can write functional code as concise as that in Python with type-safety; 2) OCaml code often has much superior performance comparing to dynamic languages such as Python and Julia.
-However, designing and developing a full-fledged numerical library is a non-trivial task, despite that OCaml has been widely used in system programming such as MirageOS. The key difference between the two is obvious and interesting: system libraries provide a lean set of APIs to abstract complex and heterogeneous physical hardware, whilst numerical library offer a fat set of functions over a small set of abstract number types.
-When Owl project started in 2016, we were immediately confronted by a series of fundamental questions like: “what should be the basic data types”, “what should be the core data structures”, “what modules should be designed”, etc. In the following development and performance optimisation, we also tackled many research and engineering challenges on a wide range of different topics such as software engineering, language design, system and network programming, etc.
-In this chapter, We show that Owl benefits greatly from OCaml’s module system which not only allows us to write concise generic code with superior performance, but also leads to a very unique design to enable parallel and distributed computing. OCaml’s static type checking significantly reduces potential bugs and accelerate the development cycle. We would like to share the knowledge and lessons learnt from building up a full-fledge system for scientific computing with the functional programming community.
-
-
-Architecture Overview
-Owl is a complex library consisting of numerous functions (over 6500 by the end of 2017), we have strived for a modular design to make sure that the system is flexible enough to be extended in future. In the following, we will present its architecture briefly.
-
- Owl system architecture
-
-
Owl system architecture
-
-The [@fig:architecture:architecture] gives a bird view of Owl’s system architecture, i.e. the two subsystems and their modules. The subsystem on the left part is Owl’s Numerical Subsystem. The modules contained in this subsystem fall into three categories: (1) core modules contains basic data structures and foreign function interfaces to other libraries (e.g., CBLAS and LAPACKE); (2) classic analytics contains basic mathematical and statistical functions, linear algebra, regression, optimisation, plotting, etc.; (3) composable service includes more advanced numerical techniques such as deep neural network, natural language processing, data processing and service deployment tools.
-The numerical subsystem is further organised in a stack of smaller libraries, as follows.
-
-Base is the basis of all other libraries in Owl. Base defines core data structures, exceptions, and part of numerical functions. Because it contains pure OCaml code so the applications built atop of Base can be safely compiled into native code, bytecode, JavaScript, even into unikernels. Fortunately, majority of Owl’s advanced functions are implemented in pure OCaml.
Owl is the backbone of the numerical subsystem. It depends on Base but replaces some pure OCaml functions with C implementations (e.g. vectorised math functions in Ndarray module). Mixing C code into the library limits the choice of backends (e.g. browsers and MirageOS) but gives us significant performance improvement when running applications on CPU.
Zoo is designed for packaging and sharing code snippets among users. This module targets small scripts and light numerical functions which may not be suitable for publishing on the heavier OPAM system. The code is distributed via gists on Github, and Zoo is able to resolve the dependency and automatically pull in and cache the code.
Top is the Toplevel system of Owl. It automatically loads both Owl and Zoo, and installs multiple pretty printers for various data types.
-The subsystem on the right is called Actor Subsystem which extends Owl’s capability to parallel and distributed computing. The addition of Actor subsystem makes Owl fundamentally different from mainstream numerical libraries such as SciPy and Julia. The core idea is to transform a user application from sequential execution mode into parallel mode (using various computation engines) with minimal efforts. The method we used is to compose two subsystems together with functors to generate the parallel version of the module defined in the numerical subsystem.
-Besides, there are other utility modules such as plotting. Plotting is an indispensable function in modern numerical libraries. We build Plot module on top of PLplot which is a powerful cross-platform plotting library. However PLPlot only provides very low-level functions to interact with its multiple plotting engines, even making a simple plot involves very lengthy and tedious control sequence. Using these low-level functions directly requires developers to understand the mechanisms in depth, which not only significantly reduces the productivity but also is prone to errors. Inspired by Matlab, we implement Plot module to provide developers a set of high-level APIs. The core plotting engine is very lightweight and only contains about 200 LOC. Its core design is to cache all the plotting operations as a sequence of function closures and execute them all when we output the figure.
-
-
-Core Implementation
-
-N-dimensional Array
-N-dimensional array and matrix are the building blocks of Owl library, their functionality are implemented in Ndarray and Matrix modules respectively. Matrix is a special case of n-dimensional array, and in fact many functions in Matrix module call the corresponding functions in Ndarray directly.
-For n-dimensional array and matrix, Owl supports both dense and sparse data structures. The dense data structure is built atop of OCaml’s native Bigarray module hence it can be easily interfaced with other libraries like BLAS and LAPACK. Owl also supports both single and double precisions for both real and complex number. Therefore, Owl essentially has covered all the necessary number types in most common scientific computations.
-
-The first group contains the vectorised mathematical functions such as sin, cos, relu, etc.
The second group contains the high-level functionality to manipulate arrays and matrices, e.g., index, slice, tile, repeat, pad, etc.
The third group contains the linear algebra functions specifically for matrices. Almost all the linear algebra functions in Owl call directly the corresponding functions in CBLAS and LAPACKE.
-These functions together provide a strong support for developing high-level numerical functions. Especially the first two groups turn out to be extremely useful for writing machine learning and deep neural network applications. Function polymorphism is achieved using GADT (Generalized algebraic data type), therefore most functions in Generic module accept the input of four basic number types.
-Optimisation with C Code
-Interfacing to high performance language is not uncommon practice among numerical libraries. If you look at the source code of NumPy, more than 50% is C code. In SciPy, the FORTRAN and C code takes up more than 40%. Even in Julia, about 26% of its code is in C or C++, most of them in the core source code.
-Besides interfacing to existing libraries, we focus on implementing the core operations in the Ndarray modules with C code. As we have seen in the N-Dimensional Arrays chapter, the n-dimensional array module lies in the heart of Owl, and many other libraries. NumPy library itself focuses solely on providing a powerful ndarray module to the Python world.
-An ndarray is a container of items of the same type. It consists of a contiguous block of memory, combined with an indexing scheme that maps N integers into the location of an item in the block. A stride indexing scheme can then be applied on this block of memory to access elements. Once converted properly to the C world, a ndarray can be effectively manipulated with normal C code.
-There is a big room for optimising the C code. We are trying to push the performance forward with multiple techniques. We mainly use the multiprocessing with OpenMP and parallel computing using SIMD intrinsics when possible.
-
-
-Interfaced Libraries
-Some functionality such as math and linear algebra is included into the system by interfacing to other libraries. Rather than simply exposing the low-level functions, we carefully design easy-to-use high-level APIs and this section will cover these modules. For example, the mathematical functions, especially the special functions, are interfaced from the Cephes Mathematical Functions Library, and the normal math functions rely on the standard C library.
-Even though Fortran is no longer among the top choices as a programming language, there is still a large body of FORTRAN numerical libraries whose performance still remain competitive even by today’s standard, e.g. BLAS and LAPACK. When designing the linear algebra module, we decide to interface to CBLAS and LAPACKE (i.e. the corresponding C interface of BLAS and LAPACK) then further build higher-level APIs atop of the low-level FORTRAN functions. The high-level APIs hides many tedious tasks such as setting memory layout, allocating workspace, calculating strides, etc.
-
-
-
-Advanced Functionality
-Built on these core modules are the advanced functionalities in Owl. We have introduced many of them in the first part of this book.
-
-Computation Graph
-As a functional programmer, it is basic knowledge that a function takes an input then produces an output. The input of a function can be the output of another function which then creates dependency. If we view a function as one node in a graph, and its input and output as incoming and outgoing links respectively, as the computation continues, these functions are chained together to form a directed acyclic graph (DAG). Such a DAG is often referred to as a computation graph.
-Computation graph plays a critical role in our system. Its benefits are many-fold: provides simulate lazy evaluation in a language with eager evaluation, reduce computation complexity by optimising the structure of a graph, reduce memory footprint, etc. It can be used for supporting multiple other high level modules e.g. algorithmic differentiation, and GPU computing modules all implicitly or explicitly use computation graph to perform calculations.
-
-
-Algorithmic Differentiation
-Atop of the core components, we have developed several modules to extend Owl’s numerical capability. E.g., Maths module includes many basic and advanced mathematical functions, whist Stats module provides various statistical functions such as random number generators, hypothesis tests, and so on. The most important extended module is Algodiff, which implements the algorithmic differentiation functionality. Owl’s Algodiff module is based on the core nested automatic differentiation algorithm and differentiation API of DiffSharp, which provides support for both forward and reverse differentiation and arbitrary higher order derivatives.
-Algodiff module is able to provide the derivative, Jacobian, and Hessian of a large range of functions, we exploit this power to further build the optimisation engine. The optimisation engine is light and highly configurable, and also serves as the foundation of Regression module and Neural Network module because both are essentially mathematical optimisation problems. The flexibility in optimisation engine leads to an extremely compact design and small code base. For a full-fledge deep neural network module, we only use about 2500 LoC and its inference performance on CPU is superior to specialised frameworks such as TenserFlow and Caffee.
-
-
-Regression
-Regression is an important topic in statistical modelling and machine learning. It’s about modelling problems which include one or more variables (also called “features” or “predictors”) and making predictions of another variable (“output variable”) based on previous data of predictors.
-Regression analysis includes a wide range of models, from linear regression to isotonic regression, each with different theory background and application fields. Explaining all these models are beyond the scope of this book. In this chapter, we focus on several common forms of regressions, mainly linear regression and logistic regression. We introduce their basic ideas, how they are supported in Owl, and how to use them to solve problems.
-
-
-Neural Network
-We have no intention to make yet another framework for deep neural networks. The original motivation of including such a neural network module was simply for demo purpose. It turns out that with Owl’s architecture and its internal functionality (Algodiff, CGraph, etc.), combined with OCaml’s powerful module system, implementing a full featured neural network module only requires approximately 3500 LoC.
-Algodiff is the most powerful part of Owl and offers great benefits to the modules built atop of it. In neural network case, we only need to describe the logic of the forward pass without worrying about the backward propagation at all, because the Algodiff figures it out automatically for us thus reduces the potential errors. This explains why a full-featured neural network module only requires less than 3.5k LoC. Actually, if you are really interested, you can have a look at Owl’s Feedforward Network which only uses a couple of hundreds lines of code to implement a complete Feedforward network.
-
-
-
-Parallel Computing
-
-Actor Engine
-Parallelism can take place at various levels, e.g. on multiple cores of the same CPU, or on multiple CPUs in a network, or even on a cluster of GPUs. OCaml official release only supports single threading model at the moment, and the work on Multicore OCaml is still ongoing in the Computer Lab in Cambridge. In the following, we will present how parallelism is achieved in Owl to speed up numerical computations.
-The design of distributed and parallel computing module essentially differentiates Owl from other mainstream numerical libraries. For most libraries, the capability of distributed and parallel computing is often implemented as a third-party library, and the users have to deal with low-level message passing interfaces. However, Owl achieves such capability through its Actor subsystem.
-
-
-GPU Computing
-Scientific computing involves intensive computations, and GPU has become an important option to accelerate these computations by performing parallel computation on its massive cores. There are two popular options in GPGPU computing: CUDA and OpenCL. CUDA is developed by Nvidia and specifically targets their own hardware platform whereas OpenCL is a cross platform solution and supported by multiple vendors. Owl currently supports OpenCL and CUDA support is included in our future plan.
-To improve performance of a numerical library such as Owl, it is necessary to support multiple hardware platforms. One idea is to “freeride” existing libraries that already support various hardware platforms. We believe that computation graph is a suitable IR to achieve interoperability between different libraries. Along this line, we develop a prototype symbolic layer system by using which the users can define a computation in Owl and then turn in into ONNX structure, which can be executed with many different platforms such as TensorFlow. By using the symbolic layer, we show the system workflow, and how powerful features of Owl, such as algorithmic differentiation, can be used in TensorFlow. We then briefly introduce system design and implementation.
-
-
-OpenMP
-OpenMP uses shared memory multi-threading model to provide parallel computation. It is requires both compiler support and linking to specific system libraries. OpenMP support is transparent to programmers. It can be enabled by turning on the corresponding compilation switch in dune file. After enabling OpenMP, many vectorised math operators are replaced with the corresponding OpenMP implementation in the compiling phase. However, parallelism offered by OpenMP is not a free lunch. The scheduling mechanism adds extra overhead to a computation task. If the task per se is not computation heavy or the ndarray is small, OpenMP often slows down the computation. We therefore set a threshold on ndarray size below which OpenMP code is not triggered. This simple mechanism turns out to be very effective in practice. To further utilise the power of OpenMP, we build an automatic tuning module to decide the proper threshold value for different operations.
-
-
-
-
-Summary
-As the first chapter in Part II, this chapter gives a brief overview of the Owl architecture, including the core modules, the advanced functionalities, and parallel computation support. Some of these topics are covered in Part I, and we will talk about the rest in the second part of this book. This part is about Owl’s internal working mechanism. Stay tuned if you are interested in how a numerical library is built, not just how it is used.
-
-
- Next: Chapter 19Core Optimisation
\ No newline at end of file
diff --git a/docs/backend.html b/docs/backend.html
deleted file mode 100644
index 819cabb..0000000
--- a/docs/backend.html
+++ /dev/null
@@ -1,325 +0,0 @@
-Compiler Backends - Owl Online Tutorials
-Compiler Backends
-For a numerical library, it is always beneficial and a challenge to extend to multiple execution backends. We have seen how we support accelerators such as GPU by utilising symbolic representation and computation graph standard such as ONNX. In this chapter we introduce how Owl can be used on more edge-oriented backends, including JavaScript and MirageOS. We also introduce the base library in Owl, since this pure OCaml library is built to support these backends.
-
-Base Library
-Before we start, we need to understand how Owl enables compiling to multiple backends by providing different implementations. The Owl framework, as well as many of its external libraries, is actually divided to two parts: a Base library and a Core library. The base library is implemented with pure OCaml. For some backends such as JavaScript, we can only use the functions implemented in OCaml.
-You may wonder how much we will be limited by the Base. Fortunately, the most advanced functions in Owl are often implemented in pure OCaml and they live in the Base, which includes e.g. algorithmic differentiation, optimisation, even neural networks and many others. Here is the structure of the core functor stack in Owl:
-
- Core functor stack in owl
-
-
Core functor stack in owl
-
-Ndarray is the core building block in Owl. As we have described in the previous chapters how we use C code to push forward the performance of Owl computation. The base library aims to implements all the necessary functions as the core library ndarray module. The stack is implemented in such way that the user can switch between these two different implementation without the modules of higher layer. In the Owl functor stack, ndarray is used to support the CGraph module to provide lazy evaluation functionalities.
-You might be wondering: where is the ndarray module then? Here we use the Owl_base_algodiff_primal_ops module, which is simply a wrapper around the base ndarray module. It also includes a small number of Matrix and Linear Algebra functions. By providing this wrapper instead of using the Ndarray module directly, we can avoid mixing all the function in the ndarray module and makes it a large Goliath.
-Next, the Algorithmic Differentiation can build up its computation module based on normal ndarray or its lazy version. For example, you can have an AD that relies on the normal single precision base ndarray module:
-
-
module AD = Owl_algodiff_generic.Make (Owl_base_algodiff_primal_ops.S)
-
Or it can be built on an double precision lazy evaluated core ndarray module:
-
-
module CPU_Engine = Owl_computation_cpu_engine.Make (Owl_algodiff_primal_ops.D)
-module AD = Owl_algodiff_generic.Make (CPU_Engine)
-
Going even higher, we have the advanced modules Optimisation and Neural Network modules. They are both based on the AD module. For example, the code below shows how we can build a neural graph module by layers of functors from the base ndarray.
-
-
module G = Owl_neural_graph.Make
- (Owl_neural_neuron.Make
- (Owl_optimise_generic.Make
- (Owl_algodiff_generic.Make
- (Owl_base_algodiff_primal_ops.S))))
-
Normally the users does not have to care about how these modules are constructed layer by layer, but understanding the functor stack and typing is nevertheless beneficial, especially when you are creating new modules that relies on the base ndarray module.
-These examples show that once we have built an application with the core Ndarray module, we can then seamlessly switch it to base ndarray module without changing anything else. That means that all the code and examples we have seen so far can be used directly on different backends that requires pure implementation.
-The base library is still an on-going work and there is still a lot to do. Though the ndarray module is a large part in base library, there are other modules that also need to be re-implemented in OCaml, such as the Linear Algebra module. We need to add more functions such as the SVD factorisation. Even for the Ndarray itself we still cannot totally cover the core ndarray yet. Our strategy is that, we put most of the signature file in base library, and the core library signature file includes its corresponding signature file from the base library, plus functions that are currently unique to core library. The target is to total coverage so that the core and base library provide exactly the same functions.
-As can be expected, the pure OCaml implementation normally performs worse than the C code implemented version. For example, for the complex convolution, without the help of optimised routines from OpenBLAS ect., we can only provide the naive implementation that includes multiple for-loops. Its performance is orders of magnitude slower than the C version. Currently our priority is to implement the functions themselves instead of caring about function optimisation, nor do we intend to out-perform C code with pure OCaml implementation.
-
-
-Backend: JavaScript
-At first glance, JavaScript has very little to do with high-performance scientific computing. Then why Owl cares about it? One important reason is that browser is arguably the most widely deployed technology on various edge devices, e.g. mobile phones, tablets, laptops, etc. More functionalities are being pushed from data centers to edge for reduced latency, better privacy and security. And JavaScript applications running in a browser are getting more complicated and powerful. Moreover, JavaScript interpreters are being increasingly optimised, and even relatively complicated computational tasks can run with reasonable performance.
-This chapter uses two simple examples to demonstrate how to compile Owl applications into JavaScript code so that you can deploy the analytical code into browsers, using both native OCaml code and Facebook Reason. It additionally requires the use of dune. As you will see, this will make the compilation to JavaScript effortless.
-
-Use Native OCaml
-We rely on the tool js_of_ocaml to convert native OCaml code into JavaScript. Js_of_ocaml is a compiler from OCaml bytecode programs to JavaScript. The process can thus be divided into two phases: first, compile the OCaml source code into bytecode executables, and then apply the js_of_ocaml command to it. It supports the core Bigarray module among most of the OCaml standard libraries. However, since the Sys module is not fully supported, we are careful to not use functions from this module in the base library.
-We have described how Algorithm Differentiation plays a core role in the ecosystem of Owl, so now we use an example of AD to demonstrate how we convert a numerical programme into JavaScript code and then get executed. The example comes from the Optimisation chapter, and is about optimise the mathematical function sin. The first step is writing down our application in OCaml as follows, then save it into a file demo.ml.
-
-
- module AlgodiffD = Owl_algodiff_generic.Make (Owl_base_algodiff_primal_ops.D)
- open AlgodiffD
-
- let rec desc ?(eta=F 0.01) ?(eps=1e-6) f x =
- let g = (diff f) x in
- if (unpack_flt g) < eps then x
- else desc ~eta ~eps f Maths.(x - eta * g)
-
- let _ =
- let f = Maths.sin in
- let y = desc f (F 0.1) in
- Owl_log.info "argmin f(x) = %g" (unpack_flt y)
-
-
The code is very simple: the desc defines a gradient descent algorithm, and then we use desc to calculate the minimum value of Maths.sin function. In the end, we print out the result using Owl_log module’s info function. Note that we pass in the base Ndarray module to the AD functor to create a corresponding AD module.
-In the second step, we need to create a dune file as follows. This file will instruct how the OCaml code will be first compiled into bytecode then converted into JavaScript by calling js_of_ocaml.
-
-
(executable
- (name demo)
- (modes byte js)
- (libraries owl-base))
-
With these two files in the same folder, you can then simply run the following command in the terminal.
-
-
dune build demo.bc && js_of_ocaml _build/default/demo.bc
-
Or even better, since js_of_ocaml is natively supported by dune, we can simply execute:
-
-The command builds the application and generates a demo.bc.js in the _build/default/ folder. Finally, we can run the JavaScript using Node.js (or loading into a browser using an appropriate html page).
-
-
node _build/default/demo.bc.js
-
As a result, you should be able to see the output result shows a value that minimise the sin function, and should be similar to:
-
-
2019-12-30 18:05:49.760 INFO : argmin f(x) = -1.5708
-
Even though we present a simple example, you should keep in mind that the base library can be used to produce more complex and interactive browser applications.
-
-
-Use Facebook Reason
-Facebook Reason leverages OCaml as a backend to provide type safe JavaScript. It is gaining its momentum and becoming a popular choice of developing web applications. It actually uses another tool, BuckleScript, to convert the Reason/OCaml code to JavaScript. Since Reason is basically a syntax layer built on top of OCaml, it is very straightforward to use Owl in Reason to develop advanced numerical applications.
-In this example, we use reason code to manipulate multi-dimensional arrays, the core data structure in Owl. First, we save the following code into a reason file called demo.re. Note the suffix is .re now. It includes several basic math and Ndarray operations in Owl.
-
-
- open! Owl_base;
-
- /* calculate math functions */
- let x = Owl_base_maths.sin(5.);
- Owl_log.info("Result is %f", x);
-
- /* create random ndarray then print */
- let y = Owl_base_dense_ndarray.D.uniform([|3,4,5|]);
- Owl_base_dense_ndarray.D.set(y,[|1,1,1|],1.);
- Owl_base_dense_ndarray.D.print(y);
-
- /* take a slice */
- let z = Owl_base_dense_ndarray.D.get_slice([[],[],[0,3]],y);
- Owl_base_dense_ndarray.D.print(z);
-
The code above is simple, just creates a random ndarray, takes a slice, and then prints them out. Owl library can be seamlessly used in Reason. Next, instead of using Reason’s own translation of this frontend syntax with bucklescript, we still turn to js_of_ocaml for help. Let’s look at the dune file, which turns out to be the same as that in the previous example.
-
-
(executable
- (name demo)
- (modes js)
- (libraries owl-base))
-
As in the previous example, you can then compile and run the code with following commands.
-
-
dune build
- node _build/default/demo.bc.js
-
As you can see, except that the code is written in different languages, the rest of the steps are identical in both example thanks to js_of_ocaml and dune.
-
-
-
-Backend: MirageOS
-
-MirageOS and Unikernel
-Besides JavaScript, another choice of backend we aim to support is the MirageOS. It is an approach to build unikernels. A unikernel is a specialised, single address space machine image constructed with library operating systems. Unlike normal virtual machine, it only contains a minimal set of libraries required for one application. It can run directly on a hypervisor or hardware without relying on operating systems such as Linux and Windows. The unikernl is thus concise and secure, and extremely efficient for distributed and executed on either cloud or edge devices.
-MirageOS is one solution to building unikernels. It utilises the high-level languages OCaml and a runtime to provide API for operating system functionalities. In using MirageOS, the users can think of the Xen hypervisor as a stable hardware platform, without worrying about the hardware details such as devices. Furthermore, since the Xen hypervisor is widely used in platforms such as Amazon EC2 and Rackspace Cloud, MirageOS-built unikernel can be readily deployed on these platforms. Besides, benefiting from its efficiency and security, MirageOS also aims to form a core piece of the Nymote/MISO tool stack to power the Internet of Things.
-
-
-Example: Gradient Descent
-Since MirageOS is based around the OCaml language, we can safely integrate the Owl library with it. To demonstrate how we use MirageOS as backend, we again use the previous Algorithm Differentiation based optimisation example. Before we start, please make sure to follow the installation instruction. Let’s look at the code:
-
-
module A = Owl_algodiff_generic.Make (Owl_algodiff_primal_ops.S)
-open A
-
-let rec desc ?(eta=F 0.01) ?(eps=1e-6) f x =
- let g = (diff f) x in
- if (unpack_flt (Maths.abs g)) < eps then x
- else desc ~eta ~eps f Maths.(x - eta * g)
-
-let main () =
- let f x = Maths.(pow x (F 3.) - (F 2.) * pow x (F 2.) + (F 2.)) in
- let init = Stats.uniform_rvs ~a:0. ~b:10. in
- let y = desc f (F init) in
- Owl_log.info "argmin f(x) = %g" (unpack_flt y)
-
This part of code is mostly the same as before. By applying the diff function of the algorithmic differentiation module, we use the gradient descent method to find the value that minimises the function \(x^3 - 2x^2 + 2\). Then we need to add something different:
-
-
module GD = struct
- let start = main (); Lwt.return_unit
-end
-
Here the start is an entry point to the unikernel. It performs the normal OCaml function main, and the return a Lwt thread that will be evaluated to unit. Lwt is a concurrent programming library in OCaml. It provides the “promise” data type that can be determined in the future. Please refer to its document for more information if you are interested.
-All the code above is written to a file called gd_owl.ml. To build a unikernel, next we need to define its configuration. In the same directory, we create a file called configure.ml:
-
-
open Mirage
-
-let main =
- foreign
- ~packages:[package "owl"]
- "Gd_owl.GD" job
-
-let () =
- register "gd_owl" [main]
-
It’s not complex. First we need to open the Mirage module. Then we declare a value main (or you can name it any other name). It calls the foreign function to specify the configuration. First, in the package parameter, we declare that this unikernel requires Owl library. The next string parameter “Gd_owl.GD” specifies the name of the implementation file, and in that file the module GD that contains the start entry point. The third parameter job declares the type of devices required by a unikernel, such as network interfaces, network stacks, file systems, etc. Since here we only do the calculation, there is no extra device required, so the third parameter is a job. Finally, we register the unikernel entry file gd_owl with the main configuration value.
-That’s all it takes for coding. Now we can take a look at the compiling part. MirageOS itself supports multiple backends. The crucial choice therefore is to decide which one to use at the beginning by using mirage configure. In the directory that holds the previous two files, you run mirage configure -t unix, and it configures to build the unikernel into a Unix ELF binary that can be directly executed. Or you can use mirage configure -t xen, and then the resulting unikernel will use hypervisor backend like Xen or KVM. Either way, the unikernel runs as a virtual machine after starting up. In this example we choose to use UNIX as backends. So we run:
-
-
mirage configure -t unix
-
This command generates a Makefile based on the configuration information. It includes all the building rules. Next, to make sure all the dependencies are installed, we need to run:
-
-Finally, we can build the unikernels by simply running:
-
-and it calls the mirage build command. As a result, now your current directory contains the _build/gd_owl.native executable, which is the unikernel we want. Executing it yields a similar result as before:
-
-
INFO : argmin f(x) = 1.33333
-
Example: Neural Network
-As a more complex example we have also built a simple neural network to perform the MNIST handwritten digits recognition task:
-
-
module N = Owl_base_algodiff_primal_ops.S
-module NN = Owl_neural_generic.Make (N)
-open NN
-open NN.Graph
-open NN.Algodiff
-
-let make_network input_shape =
- input input_shape
- |> lambda (fun x -> Maths.(x / F 256.))
- |> fully_connected 25 ~act_typ:Activation.Relu
- |> linear 10 ~act_typ:Activation.(Softmax 1)
- |> get_network
-
This neural network has two hidden layer, has a small weight size (146KB), and works well in testing (92% accuracy). We can right the weight into a text file. This file is named simple_mnist.ml, and similar to previous example, we can add a unikernel entry point function in the file:
-
-
module Main = struct
- let start = infer (); Lwt.return_unit
-end
-
Here the infer function creates a neural network, loads the weight, and then performs inference on an input image. We also need a configuration file. Again, it’s mostly the same:
-
-
open Mirage
-
-let main =
- foreign
- ~packages:[package "owl-base"]
- "Simple_mnist.Main" job
-
-let () =
- register "Simple_mnist" [main]
-
All the code is included in this gist. Once compiled to MirageOS unikernel with unix backends, the generated binary is 10MB. You can also try compiling this application to JavaScript.
-By these examples we show that the Owl library can be readily deployed into unikernels via MirageOS. The numerical functionalities can then greatly enhance the express ability of possible OCaml-MirageOS applications. Of course, we cannot cover all the important topics about MirageOS, please refer to the documentation of MirageOS abd Xen Hypervisor for more information.
-
-
-
-Evaluation
-In the evaluation section we mainly compare the performance of different backends we use. Specifically, we observe three representative groups of operations: (1) map and fold operations on ndarray; (2) using gradient descent, a common numerical computing subroutine, to get \(argmin\) of a certain function; (3) conducting inference on complex DNNs, including SqueezeNet and a VGG-like convolution network. The evaluations are conducted on a ThinkPad T460S laptop with Ubuntu 16.04 operating system. It has an Intel Core i5-6200U CPU and 12GB RAM.
-The OCaml compiler can produce two kinds of executables: bytecode and native. Native executables are compiled for specific architectures and are generally faster, while bytecode executables have the advantage of being portable.
-
- Performance of map and fold operations on ndarray on laptop and RaspberryPi
-
-
Performance of map and fold operations on ndarray on laptop and RaspberryPi
-
-For JavaScript, we use the js_of_ocaml approach as described in the previous sections. Note that for convenience we refer to the pure implementation of OCaml and the mix implementation of OCaml and C as base-lib and owl-lib separately, but they are in fact all included in the Owl library. For Mirage compilation, we use both libraries.
-[@fig:backend:map_fold](a-b) show the performance of map and fold operations on ndarray. We use simple functions such as plus and multiplication on 1-d (size \(< 1,000\)) and 2-d arrays. The log-log relationship between total size of ndarray and the time each operation takes keeps linear. For both operations, owl-lib is faster than base-lib, and native executables outperform bytecode ones. The performance of Mirage executives is close to that of native code. Generally JavaScript runs the slowest, but note how the performance gap between JavaScript and the others converges when the ndarray size grows. For fold operation, JavaScript even runs faster than bytecode when size is sufficiently large.
-Note that for the fold operation, there is an obvious increase in time used at around input size of \(10^3\) for fold operations, while there is not such change for the map operation. That is because I change the input from one dimensional ndarray to two dimensional starting that size. This change does not affect map operation, since it treats an input of any dimension as a one dimensional vector. On the other hand, the fold operation considers the factor of dimension, and thus its performance is affected by this change.
-
- Performance of gradient descent on function \(f\)
-
-
Performance of gradient descent on function \(f\)
-
-In [@fig:backend:gd], we want to investigate if the above observations still hold in more complex numerical computation. We choose to use a Gradient Descent algorithm to find the value that locally minimise a function. We choose the initial value randomly between \([0, 10]\). For both \(sin(x)\) and \(x^3 -2x^2 + 2\), we can see that JavaScript runs the slowest, but this time the base-lib slightly outperforms owl-lib.
-We further compare the performance of DNN, which requires large amount of computation. We compare SqueezeNet and a VGG-like convolution network. They have different sizes of weight and networks structure complexities.
-
-Inference Speed of Deep Neural Networks {#tbl:zoo:dnn}
-
-
-
-
-
-| owl-native |
-7.96 (\(\pm\) 0.93) |
-196.26(\(\pm\) 1.12) |
-
-
-| owl-byte |
-9.87 (\(\pm\) 0.74) |
-218.99(\(\pm\) 9.05) |
-
-
-| base-native |
-792.56(\(\pm\) 19.95) |
-14470.97 (\(\pm\) 368.03) |
-
-
-| base-byte |
-2783.33(\(\pm\) 76.08) |
-50294.93 (\(\pm\) 1315.28) |
-
-
-| mirage-owl |
-8.09(\(\pm\) 0.08) |
-190.26(\(\pm\) 0.89) |
-
-
-| mirage-base |
-743.18 (\(\pm\) 13.29) |
-13478.53 (\(\pm\) 13.29) |
-
-
-| JavaScript |
-4325.50(\(\pm\) 447.22) |
-65545.75 (\(\pm\) 629.10) |
-
-
-
-[@tbl:zoo:dnn] shows that, though the performance difference between owl-lib and base-lib is not obvious, the former is much better. So is the difference between native and bytecode for base-lib. JavaScript is still the slowest. The core computation required for DNN inference is the convolution operation. Its implementation efficiency is the key to these differences. Current we are working on improving its implementation in base-lib.
-We have also conducted the same evaluation experiments on RaspberryPi 3 Model B. [@fig:backend:map_fold](c) shows the performance of fold operation on ndarray. Besides the fact that all backends runs about one order of magnitude slower than that on the laptop, previous observations still hold. This figure also implies that, on resource-limited devices such as RaspberryPi, the key difference is between native code and bytecode, instead of owl-lib and base-lib for this operation.
-
-Size of executables generated by backends {#tbl:zoo:size}
-
-
-
-
-
-| base |
-2,437 |
-4,298 |
-4,602 |
-739 |
-
-
-| native |
-14,875 |
-13,102 |
-16,987 |
-- |
-
-
-
-Finally, we also briefly compare the size of executables generated by different backends. We take the SqueezeNet for example, and the results are shown in [@tbl:zoo:size]. It can be seen that owl-lib executives have larger size compared to base-lib ones, and JavaScript code has the smallest file size. There does not exist a dominant method of deployment for all these backends. It is thus imperative to choose suitable backend according to deployment environment.
-
-
-Summary
-The base library in Owl was separated from the core module mainly to accommodate multiple possible execution backends. This chapter introduces how the base module works. Then we show two possible backends: the JavaScript and the Unikernel virtual machine. Both back ends are helpful to extend the application of Owl to more devices. Finally, we use several examples to demonstrate how these backends are used and their performances.
-
-
- Next: Chapter 24Distributed Computing
\ No newline at end of file
diff --git a/docs/case-image-inception.html b/docs/case-image-inception.html
deleted file mode 100644
index 4c464e6..0000000
--- a/docs/case-image-inception.html
+++ /dev/null
@@ -1,415 +0,0 @@
-Case - Image Recognition - Owl Online Tutorials
-Case - Image Recognition
-How can a computer take an image and answer questions like “what is in this picture? A cat, dog, or something else?” In the recent few years the machine learning community has been making tremendous progress on tackling this difficult problem. In particular, Deep Neural Network (DNN) is able to achieve reasonable performance on visual recognition tasks – matching or even exceeding human performance in some domains.
-We have introduced the neural network module in the previous chapter. In this chapter, we will show one specific example that is built on the neural network module: using the InceptionV3 architecture to perform the image classification task.
-
-Background
-InceptionV3 is a widely-used DNN architecture for image classification that can attain significant accuracy with small amount of parameters. It is not invented out of thin air. The development using DNN to perform image recognition is a stream that dates back to more than 20 years ago. During this period, the research in this area is pushed forward again and again in various work. In this chapter, we first introduce how image classification architectures are developed up until Inception. Surveying these related work will help us to understand how Inception architectures are built.
-
-LeNet
-In the regression chapter, we have seen a simple neural network that contains three layers, and use it to recognise the simple handwritten numbers from the MNSIT dataset. Here, each pixel acts as an input feature. Recall that each image can be seen as a ndarray. For a black and white image such as the MNSIT image, its bitmap are interpreted as a matrix. Every pixel in the bitmap has a value between 0 and 255. For a colour image, it can be interpreted as a 3-dimension array with three channels, each corresponding to the blue, green, and red layer.
-However, we cannot rely on adding more fully connected layers to do real world high precision image classification. One important improvement that the Convolution Neural Network makes is that it uses filters in the convolution operation. As a result, instead of using the whole image as an array of features, the image is divided into a number of tiles. They will then serve as the basic feature of the network’s prediction.
-The next building block is the pooling layer. Recall from the neural network chapter that, both average pooling and max pooling can aggregate information from multiple pixels into one and “blur” the input image or feature. So why is it so important? By reducing the size of input, pooling helps to reduce the number of parameters and the amount of computation required. Besides, blurring the features is a way to avoid over-fitting training data. In the end, only connect high-level features with fully connection. This is the structure proposed in [@lecun1998gradient]. This whole process can be shown in [@fig:case-image-inception:workflow].
-
- Workflow of image classification
-
-
Workflow of image classification
-
-In general, layers of convolution retrieve information from detailed to more abstract gradually. In a DNN, The lower layers of neurons retrieve information about simple shapes such as edges and points. Going higher, the neurons can capture complex structures, such as the tire of a car, the face of a cat, etc. Close to the top layers, the neurons can retrieve and abstract complex ideas, such as “car”, “cat”, etc. And then finally generates the classification results.
-
-
-AlexNet
-Next breakthrough comes from the AlexNet proposed in [@krizhevsky2012imagenet]. The authors introduce better non-linearity in the network with the ReLU activation. Operations such as convolution include mainly linear operations such as matrix multiplication and add. But that’s not how the real world data looks like. Recall that from the previous Regression chapter, even though linear regression can be effective, for most of the real world application we need more complex method such as polynomial regression. The same can be applied here. We need to increase the non-linearity to accommodate real world data such as image.
-There are multiple activation choices, such as tanh and sigmoid. Compared to the previous activation functions such as tanh (\(f(x)=\textrm{tanh}(x)\)), or sigmoid (\(f(x) = (1 + e^{-x})^{-1}\)), the computation of ReLU is simple: \(f(x) = max(0, x)\). In terms of training time with gradient descent, ReLu is much faster than the aforementioned two computational expensive functions, and thus more frequently used. The accuracy loss in gradient computation is small, and it also makes the training faster. For example, [@krizhevsky2012imagenet] shows that, a four-layer convolutional neural network with ReLUs reaches a 25% training error rate on CIFAR-10 six times faster than an equivalent network with the tanh neurons. Besides, in practice, networks with ReLU tend to show better convergence performance than sigmoid.
-Another thing that AlexNet proposes is to use the dropout layer. It is mainly used to solve the over-fitting problem. This operation only works during training phase. It randomly selects some elements in the input ndarray and set their values to zero, thus “deactivates” the knowledge that can be learnt from these points. In this way, the network intentionally drops certain part of training examples and avoids the over-fitting problem. It is similar to the regularisation method we use in the linear regression.
-The one more thing that we need to take a note from AlexNet is that by going deeper make the network “longer”, we achieve better accuracy. So instead of just convolution and pooling, we now build convolution followed by convolution and then pooling, and repeat this process again…. A deeper network captures finer features, and this would be a trend that is followed by successive architectures.
-
-
-VGG
-The VGG network proposed in [@simonyan2014very] is the next step after AlexNet. The most notable change introduced by VGG is that it uses small kernel sizes such as 3x3 instead of the 11x11 with a large stride of 4 in AlexNet. Using multiple small kernels is much more flexible than only using a large one. For example, for an input image, by applying two 3x3 kernels with slide size of 1, that equals to using a 5x5 kernel. If stacking three 3x3, it equals using one 7x7 convolution.
-By replacing large kernels with multiple small kernels, the number of parameter is visibly reduced. In the previous two examples, replace one 5x5 with two 3x3, we reduce the parameter by \(1 - 2 * 3 * 3 / (5 * 5) = 28\%\). Replace the 7x7 kernel, and we save parameters by \(1 - 3 * 3 * 3 / ( 7 * 7) = 45\%\).
-Therefore, with this reduction of parameter size, we can now build network with more layers, which tends to yield better performance. The VGG networks come with two variates, VGG16 and VGG19, which are the same in structure, and the only difference is that VGG19 is deeper. The code to build a VGG16 network with Owl is shown in [@zoo2019vgg16].
-One extra benefit is that using small kernels increases non-linearity. Imagine an extreme case where the kernel is as large as the input image, then the whole convolution is just one big matrix multiplication, a complete linear operation. As we have just explained in the previous section, we hope to reduce the linearity in training CNN to accommodate more real-world problems.
-
-
-ResNet
-We keep saying that building deeper network is the trend. However, going deeper has its limit. The deeper you go, the more you will experience the “vanishing gradient” problem. This problem is that, in a very deep network, during the back-propagation phase, the repeated multiplication operations will make the gradients very small, and thus the performance affected.
-The ResNet in [@he2016deep] proposes an “identity shortcut connection” that skips one or more layers and combines with predecessor layers. It is called a residual block, as shown in [@fig:case-image-inception:residual].
-
- Residual block in the ResNet
-
-
Residual block in the ResNet
-
-We can see that there is the element-wise addition that combines the information of the current output and its predecessors two layers before. It solves the gradient problem in stacking layers, since now the error can be backpropagated through multiple paths. The authors show that during training the deeper layers do not produce an error higher than its predecessor in lower layer.
-Also note that the residual block aggregate features from different level of layers, instead of purely stacking them. This pattern proves to be useful and will also be used in the Inception architecture. The ResNet can also be constructed by stacking for different layers, so that we have ResNet50, ResNet101, ResNet152, etc. The code to build a ResNet50 network with Owl is shown in [@zoo2019resnet50].
-
-
-SqueezeNet
-All these architectures, including Inception, mainly aim to push the classification accuracy forward. However, at some point we are confronted with the tradeoff between accuracy and model size. We have seen that sometimes reducing the parameter size can help the network to go deeper, and thus tends to give better accuracy. However, with the growing trend of edge computing, there is requirement for extremely small deep neural networks so that it can be easily distributed and deployed on less powerful devices. For that, sacrificing a bit of accuracy is acceptable.
-There are more and more efforts towards that direction, and the SqueezeNet [@iandola2016squeezenet] is one of them. It claims to have the AlexNet level of accuracy, but with 50 times fewer parameters.
-There are mainly three design principles for the SqueezeNet. The first one is what we are already familiar with: using a lot of 1x1 convolutions. The second one also sounds familiar. The 1x1 convolutions are used to reduce the output channels before feeding the result to the more complex 3x3 convolutions. Therefore the 3x3 convolution can have smaller input channels and thus smaller parameter size. These two principles are incorporated into a basic building block called “fire module”.
-Now that we can have a much smaller network, what about the accuracy? We don’t really want to discard the accuracy requirement totally. The third design principle in SqueezeNet is to delay the down-sampling to later in the network. Recall that the down-sampling layers such as maxpooling “blur” the information intentionally. The intuition is that, if we only use them occasionally and in the deeper layer of the network, we can have large activation maps that preserve more information and make the detection result more accurate. The code to build a SqueezeNet network with Owl is shown in [@zoo2019squeezenet].
-
-
-Capsule Network
-The research on image detection network structures is still on-going. Besides the parameter size and detection accuracy, more requirements are proposed. For example, there is the problem of recognising an object, e.g. a car, from different perspective. And the “Picasso problem” in image recognition where some feature in an object is intentionally distorted or misplaced. These problems show one deficiency in the existing image classification approach: the lack of connection between features. It may recognise a “nose” feature, and an “eye” feature, and then the object is recognised as a human face, even though the nose is perhaps above the eyes. The “Capsule network” is proposed to address this problem. Instead of using only scalar to represent feature, it uses a vector that includes more information such as orientation and object size etc. The “capsule” utilises these information to capture the relative relationship between features.
-There are many more networks that we cannot cover them one by one here, but hopefully you can see that there are some common themes in the development of image recognition architectures. Next, we will come to the main topic of this chapter: how InceptionV3 is designed based on these previous work.
-
-
-
-Building InceptionV3 Network
-Proposed by Christian Szegedy et. al., InceptionV3 is one of Google’s latest efforts to perform image recognition. It is trained for the ImageNet Large Visual Recognition Challenge. This is a standard task in computer vision, where models try to classify entire images into 1000 classes, like “Zebra”, “Dalmatian”, and “Dishwasher”, etc. Compared with previous DNN models, InceptionV3 is one of the most complex neural network architectures in computer vision.
-The design of image recognition networks is about the trade-off between computation cost, memory usage, and accuracy. Just increasing model size and computation cost tend to increase the accuracy, but the benefit will diminish soon. To solve this problem, compared to previous similar networks, the Inception architecture aims to perform well with strict constraints on memory and computational budget. This design follows several principles, such as balancing the width and depth of the network, and performing spatial aggregation over lower dimensional embeddings which may lead to small loss in representational power of networks. The resulting Inception network architectures have high performance and a relatively modest computation cost compared to simpler, more monolithic architectures. [@fig:case-image-inception:inceptionv3] shows the overall architecture of this network:
-
- Network Architecture of InceptionV3
-
-
Network Architecture of InceptionV3
-
-We can see that the whole network can be divided into several parts, and the inception module A, B, and C are both repeated based on one structure. That’s where the name “Inception” comes from: like dreams, you can have stacked these basic units layer by layer.
-
-InceptionV1 and InceptionV2
-The reason we say “InceptionV3” is because it is developed based on two previous similar architectures. To understand InceptionV3, we first need to know the characteristics of its predecessors.
-The first version of Inception, GoogLeNet [@szegedy2015going], proposes to combine convolutions with different filter sizes on the same input, and then concatenate the resulting features together. Think about an image of a bird. If you stick with using a normal square filter, then perhaps the features such as “feather” is a bit difficult to capture, but easier to do if you use a “thin” filter with a size of e.g. 1x7. By aggregating information from applying different features, we can extract features from multi-level at each step.
-Of course, adding extra filters increases computation complexity. To remedy this effect, the Inception network proposes to utilise the 1x1 convolution to reduce the dimensions of feature maps. For example, we want to apply a 3x3 filter to input ndarray of size [|1; 300; 300; 768|] and the output channel should be 320. Instead of applying a convolution layer of [|3; 3; 768; 320|] directly, we first reduce the dimension to, say, 192 by using a small convolution layer [|1; 1; 768; 192|], and then apply a [|3; 3; 192; 320|] convolution layer to get the final result. By reducing input dimension before the more complex computation with large kernels, the computation complexity is reduced.
-For those who are confused about the meaning of this array: recall from previous chapter that the format of an image as ndarray is [|batch; column; row; channel|], and that the format of a convolution operation is mainly represented as [|kernel_column; kernel_row; input_channel; output_channel|]. Here we ignore the other parameters such as slides and padding since here we focus only on the change of channels of feature map.
-In an updated version of GoogLeNet, the InceptionV2 (or BN-inception), utilises the “Batch Normalisation” layer. We have seen how normalising input data plays a vital role in improving the efficiency of gradient descent in the Optimisation chapter. Batch normalisation follows a similar path, only at it now works between each layer instead of just at the input data. This layer rescales each mini-batch with the mean and variance of this mini-batch.
-Imagine that we train a network to recognise horse, but most of the training data are actually black or blown horse. Then the network’s performance on white horse might not be quite ideal. This again leads us back to the over-fitting problem. The batch normalisation layer adds noise to input by scaling. As a result, the content at deeper layer is less sensitive to content in lower layers. Overall, the batch normalisation layer greatly improves the efficiency of training.
-
-
-Factorisation
-Now that we understand how the image recognition architectures are developed, finally it’s time to see who these factors are utilised into the InceptionV3 structure.
-
-
open Owl
-open Owl_types
-open Neural.S
-open Neural.S.Graph
-
-let conv2d_bn ?(padding=SAME) kernel stride nn =
- conv2d ~padding kernel stride nn
- |> normalisation ~training:false ~axis:3
- |> activation Activation.Relu
-
Here the conv2d_bn is a basic building block used in this network, consisting of a convolution layer, a normalisation layer, and a relu activation layer. We have already introduced how these different types of layer work. You can think of conv2d_bn as an enhanced convolution layer.
-Based on this basic block, the aim in building Inception network is still to go deeper, but here the authors introduces the three types of Inception Modules as a unit of stacking layers. Each module factorise large kernels into smaller ones. Let’s look at them one by one.
-
-
let mix_typ1 in_shape bp_size nn =
- let branch1x1 = conv2d_bn [|1;1;in_shape;64|] [|1;1|] nn in
- let branch5x5 = nn
- |> conv2d_bn [|1;1;in_shape;48|] [|1;1|]
- |> conv2d_bn [|5;5;48;64|] [|1;1|]
- in
- let branch3x3dbl = nn
- |> conv2d_bn [|1;1;in_shape;64|] [|1;1|]
- |> conv2d_bn [|3;3;64;96|] [|1;1|]
- |> conv2d_bn [|3;3;96;96|] [|1;1|]
- in
- let branch_pool = nn
- |> avg_pool2d [|3;3|] [|1;1|]
- |> conv2d_bn [|1;1;in_shape; bp_size |] [|1;1|]
- in
- concatenate 3 [|branch1x1; branch5x5; branch3x3dbl; branch_pool|]
-
The mix_typ1 structure implement the first type of inception module. In branch3x3dbl branch, it replaces a 5x5 kernel convolution layer with two 3x3 convolution layers. It follows the design in the VGG network. Of course, as we have explained, both branches uses the 1x1 to reduce dimensions before complex convolution computation.
-In some implementation the 3x3 convolutions can also be further factorised into 3x1 and then 1x3 convolutions. There are more than one way to do the factorisation. You might be thinking that it is also a good idea to replace the 3x3 convolution with two 2x2s. Well, we could do that but it saves only about 11% parameters, compared to the 33% save of current practice.
-
-
let mix_typ4 size nn =
- let branch1x1 = conv2d_bn [|1;1;768;192|] [|1;1|] nn in
- let branch7x7 = nn
- |> conv2d_bn [|1;1;768;size|] [|1;1|]
- |> conv2d_bn [|1;7;size;size|] [|1;1|]
- |> conv2d_bn [|7;1;size;192|] [|1;1|]
- in
- let branch7x7dbl = nn
- |> conv2d_bn [|1;1;768;size|] [|1;1|]
- |> conv2d_bn [|7;1;size;size|] [|1;1|]
- |> conv2d_bn [|1;7;size;size|] [|1;1|]
- |> conv2d_bn [|7;1;size;size|] [|1;1|]
- |> conv2d_bn [|1;7;size;192|] [|1;1|]
- in
- let branch_pool = nn
- |> avg_pool2d [|3;3|] [|1;1|]
- |> conv2d_bn [|1;1; 768; 192|] [|1;1|]
- in
- concatenate 3 [|branch1x1; branch7x7; branch7x7dbl; branch_pool|]
-
As shown in the code above, mix_typ4 shows the Type B inception module, another basic unit. It still separate into three branches and then concatenate them together. The special about this this type of branch is that it factorise a 7x7 convolution into the combination of a 7x1 and then a 1x7 convolution. Again, this change saves \((49 - 14) / 49 = 71.4\%\) parameters. If you have doubt about this replacement, you can do a simple experiment:
-
-
open Neural.S
-open Neural.S.Graph
-
-let network_01 =
- input [|28;28;1|]
- |> conv2d ~padding:VALID [|7;7;1;1|] [|1;1|]
- |> get_network
-
-let network_02 =
- input [|28;28;1|]
- |> conv2d ~padding:VALID [|7;1;1;1|] [|1;1|]
- |> conv2d ~padding:VALID [|1;7;1;1|] [|1;1|]
- |> get_network
-
Checking the output log, you can find out that both networks give the same output shape. This factorisation is intuitive: convolution of size does not change the output shape at that dimension. Then the two convolutions actually performs feature extraction along each dimension (height and width) respectively.
-
-
let mix_typ9 input nn =
- let branch1x1 = conv2d_bn [|1;1;input;320|] [|1;1|] nn in
- let branch3x3 = conv2d_bn [|1;1;input;384|] [|1;1|] nn in
- let branch3x3_1 = branch3x3 |> conv2d_bn [|1;3;384;384|] [|1;1|] in
- let branch3x3_2 = branch3x3 |> conv2d_bn [|3;1;384;384|] [|1;1|] in
- let branch3x3 = concatenate 3 [| branch3x3_1; branch3x3_2 |] in
- let branch3x3dbl = nn |> conv2d_bn [|1;1;input;448|] [|1;1|] |> conv2d_bn [|3;3;448;384|] [|1;1|] in
- let branch3x3dbl_1 = branch3x3dbl |> conv2d_bn [|1;3;384;384|] [|1;1|] in
- let branch3x3dbl_2 = branch3x3dbl |> conv2d_bn [|3;1;384;384|] [|1;1|] in
- let branch3x3dbl = concatenate 3 [|branch3x3dbl_1; branch3x3dbl_2|] in
- let branch_pool = nn |> avg_pool2d [|3;3|] [|1;1|] |> conv2d_bn [|1;1;input;192|] [|1;1|] in
- concatenate 3 [|branch1x1; branch3x3; branch3x3dbl; branch_pool|]
-
The final inception module is a bit more complex, but by now you should be able to understand its construction. It aggregate information from four branches. The 1x1 convolutions are used to reduce the dimension and computation complexity. Note that in both the branch3x3 and branch3x3dbl branches, both 3x1 and 1x3 convolutions are used, not as replacement of 3x3, but as separate branches. This module is for promoting high dimensional representations.
-Together, these three modules make up the core part of the InceptionV3 architecture. By applying different techniques and designs, these modules take less memory and less prone to over-fitting problem. Thus they can be stacked together to make the whole network go deeper.
-
-
-Grid Size Reduction
-For the very beginning of the design of CNN, we need to reduce the size of feature maps as well as increasing the number or channel of the feature map. We have explained how it is done using the combination of pooling layer and convolution layer. However, the reduction solution constructed this way is either too greedy or two computationally expensive.
-Inception architecture proposes a grid size reduction module. It put the same input feature map into two set of pipelines, one of them uses the pooling operation, and the other uses only convolution layers. These two types of layers are then not stacked together but concatenated vertically, as shown in the next part of code.
-
-
let mix_typ3 nn =
- let branch3x3 = conv2d_bn [|3;3;288;384|] [|2;2|] ~padding:VALID nn in
- let branch3x3dbl = nn
- |> conv2d_bn [|1;1;288;64|] [|1;1|]
- |> conv2d_bn [|3;3;64;96|] [|1;1|]
- |> conv2d_bn [|3;3;96;96|] [|2;2|] ~padding:VALID
- in
- let branch_pool = max_pool2d [|3;3|] [|2;2|] ~padding:VALID nn in
- concatenate 3 [|branch3x3; branch3x3dbl; branch_pool|]
-
mix_typ3 builds the first grid size reduction module. This replacement strategy can perform efficient reduction without losing too much information. Similarly, an extended version of this grid size reduction module is also included.
-
-
let mix_typ8 nn =
- let branch3x3 = nn
- |> conv2d_bn [|1;1;768;192|] [|1;1|]
- |> conv2d_bn [|3;3;192;320|] [|2;2|] ~padding:VALID
- in
- let branch7x7x3 = nn
- |> conv2d_bn [|1;1;768;192|] [|1;1|]
- |> conv2d_bn [|1;7;192;192|] [|1;1|]
- |> conv2d_bn [|7;1;192;192|] [|1;1|]
- |> conv2d_bn [|3;3;192;192|] [|2;2|] ~padding:VALID
- in
- let branch_pool = max_pool2d [|3;3|] [|2;2|] ~padding:VALID nn in
- concatenate 3 [|branch3x3; branch7x7x3; branch_pool|]
-
mix_typ8 is the second grid size reduction module in the deeper part of the network. It uses three branches instead of two, and each convolution branch is more complex. The 1x1 convolutions are again used. But in general it still follows the principle of performing reduction in parallel and then concatenates them together, performing an efficient feature map reduction.
-
-
-InceptionV3 Architecture
-After introducing the separate units, finally we can construct them together into the whole network in code.
-
-
let make_network img_size =
- input [|img_size;img_size;3|]
- |> conv2d_bn [|3;3;3;32|] [|2;2|] ~padding:VALID
- |> conv2d_bn [|3;3;32;32|] [|1;1|] ~padding:VALID
- |> conv2d_bn [|3;3;32;64|] [|1;1|]
- |> max_pool2d [|3;3|] [|2;2|] ~padding:VALID
- |> conv2d_bn [|1;1;64;80|] [|1;1|] ~padding:VALID
- |> conv2d_bn [|3;3;80;192|] [|1;1|] ~padding:VALID
- |> max_pool2d [|3;3|] [|2;2|] ~padding:VALID
- |> mix_typ1 192 32 |> mix_typ1 256 64 |> mix_typ1 288 64
- |> mix_typ3
- |> mix_typ4 128 |> mix_typ4 160 |> mix_typ4 160 |> mix_typ4 192
- |> mix_typ8
- |> mix_typ9 1280 |> mix_typ9 2048
- |> global_avg_pool2d
- |> linear 1000 ~act_typ:Activation.(Softmax 1)
- |> get_network
-
There is only one last thing we need to mention: the global pooling. Global Average/Max Pooling calculates the average/max output of each feature map in the previous layer. For example, if you have an [|1;10;10;64|] feature map, then this operation can make it to be [|1;1;1;64|]. This operation seems very simple, but it works at the very end of a network, and can be used to replace the fully connection layer. The parameter size of the fully connection layer has always been a problem. Now that it is replaced with a non-trainable operation, the parameter size is greatly reduced without the performance. Besides, the global pooling layer is more robust to spatial translations in the data and mitigates the over-fitting problem in fully connection, according to [@lin2013network].
-The full code is listed in [@zoo2019inceptionv3]. Even if you are not quite familiar with Owl or OCaml, it must still be quite surprising to see the network that contains 313 neuron nodes can be constructed using only about 150 lines of code. And we are talking about one of the most complex neural networks for computer vision.
-Besides InceptionV3, you can also easily construct other popular image recognition networks, such as ResNet50, VGG16, SqueezeNet etc. with elegant Owl code. We have already mentioned most of them in previous sections.
-
-
-
-Preparing Weights
-Only building a network structure is not enough. Another important aspect is proper weights of a neural network. It can be achieved by training on GBs of image data for days or longer on powerful machine clusters.
-The training is usually done via supervised learning using a large set of labelled images. Although Inception v3 can be trained from many different labelled image sets, ImageNet is a common dataset of choice. In this image dataset, the basic unit is called “synset”, which is a concept that is described by multiple words or word phrases. ImageNet aims to provide about 1,000 images for each of the 100,000 synset in WordNet. In training the InceptionV3 model, it takes more than 1 million images from ImageNet. The training of this model can take hundreds of hours of training on multiple high-performance GPUs.
-However, not everyone has access to such large resource. Another option is more viable: importing weights from existed pre-trained TensorFlow models, which are currently widely available in model collections such as this one.
-The essence of weights is list of ndarrays, which is implemented using Bigarray in OCaml. So the basic idea is to find a intermediate representation so that we can exchange the ndarray in NumPy and Bigarray in OCaml. In our implementation, we choose to use the HDF5 as this intermediate data exchange format. In Python, we use the h5py library, and in OCaml we use hdf5-ocaml.
-The method to save or load hdf5 data files are fixed, but the methods to retrieve data from model files vary depending on the type of original files. For example, if we choose to import weight form a TensorFlow model, we do something like this to achieve the weight data of each layer:
-
-
...
-reader = tf.train.NewCheckpointReader(checkpoint_file)
-for key in layer_names:
- data=reader.get_tensor(key).tolist()
-...
-
In a keras, it’s a bit more straightforward:
-
-
...
-for layer in model.layers:
- weights = layer.get_weights()
-...
-
In the OCaml side, we first create a Hashtable and read all the HDF5 key-value pairs into it. Each value is saved as a double precision Owl ndarray.
-
-
...
-let h = Hashtbl.create 50 in
-let f = H5.open_rdonly h5file in
-for i = 0 to (Array.length layers - 1) do
- let w = H5.read_float_genarray f layers.(i) C_layout in
- Hashtbl.add h layers.(i) (Dense.Ndarray.Generic.cast_d2s w)
-done;
-...
-
And then we can use the mechanism in the Neural Network model to load these values from the hashtable to networks:
-
-
...
-let wb = Neuron.mkpar n.neuron in
-Printf.printf "%s\n" n.name;
-wb.(0) <- Neuron.Arr (Hashtbl.find layers n.name);
-Neuron.update n.neuron wb
-...
-
It is very important to make clear the difference in naming of each layer in different platforms, since the creator of the original model may choose any name for each layer. Other differences have also to be taken care of. For example, the beta and gamma weights in the batch normalisation layer are represented as two different values in TensorFlow model, but they belong to the same layer in Owl. Also, some times the dimensions have to be swapped in an ndarray during this weight conversion.
-Note that this is one-off work. Once you successfully update the network with weights, the weights can be saved using Graph.save_weights, without having to repeat all these steps again. We have already prepared the weights for the InceptionV3 model and other similar models, and the users don’t have to worry about these trivial model exchanging details.
-
-
-Processing Image
-Image processing is challenging, since OCaml does not provide powerful functions to manipulate images. Though there are image processing libraries such as CamlImages, but we don’t want to add extra liabilities to Owl itself.
-To this end, we choose the non-compressed image format PPM. A PPM file is a 24-bit color image formatted using a text format. It stores each pixel with a number from 0 to 65536, which specifies the color of the pixel. Therefore, we can just use ndarray in Owl and convert that directly to PPM image without using any external libraries. We only need to take care of header information during this process.
-For example, here is the code for converting a 3-dimensional array in Owl img into a ppm file. We first need to get the content from each of the three colour channels using slicing, such as the blue channel:
-
-
let b = N.get_slice [[];[];[0]] img in
-let b = N.reshape b [|h; w|] in
-...
-
Here h and w are the height and width of the image. Then we need to merge all three matrix into a large matrix that of are of size [|h; 3*w|].
-
-
let img_mat = Dense.Matrix.S.zeros h (3 * w) in
-Dense.Matrix.S.set_slice [[];[0;-1;3]] img_mat r;
-...
-
Then, after rotating this matrix by 90 degrees, we need to rewrite this matrix to a large byte variable. Note that that though the method is straightforward, you need to be careful about the index of each element during the conversion.
-
-
let img_str = Bytes.make (w * h * 3) ' ' in
-let ww = 3 * w in
-for i = 0 to ww - 1 do
- for j = 0 to h - 1 do
- let ch = img_arr.(i).(j) |> int_of_float |> char_of_int in
- Bytes.set img_str ((h - 1 -j) * ww + i) ch;
- done
-done;
-
Finally we build another byte string that contains the metadata such as height and width, according to the specification of PPM format. Concatenating the metadata and data together, we then write the bytes data into a file.
-Similarly, to read a PPM image file into ndarray in Owl, we treat the ppm file line by line with input_line function. The metadata such as version and comments are ignored. We get the metadata such as width and height from the header.
-
-
...
-let w_h_line = input_line fp in
-let w, h = Scanf.sscanf w_h_line "%d %d" (fun w h -> w, h) in
-...
-
Then according this information, we read the rest of data into large bytes with Pervasive.really_input. Note that in 32bit OCaml, this will only work when reading strings up to about 16 megabytes.
-
-
...
-let img = Bytes.make (w * h * 3) ' ' in
-really_input fp img 0 (w * h * 3);
-close_in fp;
-...
-
Then we need to re-arrange the data in the bytes into a matrix.
-
-
let imf_o = Array.make_matrix (w * 3) h 0.0 in
-
-let ww = 3 * w in
-for i = 0 to ww - 1 do
- for j = 0 to h - 1 do
- imf_o.(i).(j) <- float_of_int (int_of_char (Bytes.get img ((h - 1 - j ) * ww + i)));
- done
-done;
-
This matrix can then be further processed into an ndarray with proper slicing.
-
-
...
-let m = Dense.Matrix.S.of_arrays img in
-let m = Dense.Matrix.S.rotate m 270 in
-let r = N.get_slice [[];[0;-1;3]] m in
-let g = N.get_slice [[];[1;-1;3]] m in
-let b = N.get_slice [[];[2;-1;3]] m in
-...
-
There are other functions such as reading in ndarray from PPM file. The full image processing code can be viewed in this gist.
-Of course, most of the time we have to deal with image of other more common format such as PNG and JPEG. For the conversion from these formats to PPM or the other way around, we use the tool ImageMagick. ImageMagick is a free and open-source tool suite for image related tasks, such as converting, modifying, and editing images. It can read and write over 200 image file formats, including the PPM format. Therefore, we preprocess the images by converting its format to PPM with the command convert. Also, the computation time of is related with the input size, and we often hope to limit the size of images. That can also be done with the command convert -resize.
-Another important preprocessing is to normalise the input. Instead of processing the input ndarray whose elements ranges from 0 to 255, we need to simply preprocess it so that all the elements fall into the range [-1, 1], as shown in the code below.
-
-
let normalise img =
- let img = Arr.div_scalar img 255. in
- let img = Arr.sub_scalar img 0.5 in
- let img = Arr.mul_scalar img 2. in
- img
-
Running Inference
-Now that we have built the network, and loaded the proper weights, it’s time to perform the most exciting and actually the easiest part: inferencing. Actually the most important part is just one function: Graph.model. In this section we hope to show how to build a service around this function so that a user can perform all the inference steps, from input image to output classification result, with as simple command as possible.
-First let’s look at the code:
-
-
#!/usr/bin/env owl
-open Owl
-
-#zoo "9428a62a31dbea75511882ab8218076f"
-
-let _ =
- let img = "panda.png" in
- let labels = InceptionV3.infer img in
- let top = 5 in
- let labels_json = InceptionV3.to_json ~top labels in
- let labels_tuples = InceptionV3.to_tuples labels in
-
- Printf.printf "\nTop %d Predictions:\n" top;
- Array.iteri (fun i x ->
- let cls, prop = x in
- Printf.printf "Prediction #%d (%.2f%%) : %s\n" i (prop *. 100.) cls;
- ) labels_tuples
-
The code itself is quite simple. First, we need to build the whole Inception network structure and loading weight etc., which is what we have already done in this gist. All we need is to loading with the zoo module in Owl. The InceptionV3 module provides three APIs:
-
-infer: Service that performs image recognition tasks over client images. It accepts a string that specifies the location of a local image. Its return value is a 1x1000 N-dimension array, each element is a float number between 0 and 1, indicating the possibility that the image belongs to one of the 1000 classes from ImageNet.
to_json: Convert the inferred result to a raw JSON string. Parameter top: an int value to specify the top-N likeliest labels to return. Default value is 5.
to_json: Convert the inferred result to an array of tuples, each tuple contains label name (“class”, string) and the probability (“prop”, float, between 0 and 1) of target image being in that class.
-After loading the inception model with #zoo primitive, the user needs to designate an absolute path of the local input image. Here we use the extend_zoo_path utility function to automatically find the “panda.png” image contained in the Gist itself. But surely a user can have her own choice. It can be of any common image format (jpg, png, gif, etc.) and size. We provide this panda picture just in case you running short of images currently.
-
- Panda image that is used for image recognition task
-
-
Panda image that is used for image recognition task
-
-With these work done, we can run inference with the neural network model and the input image by calling the infer API from InceptionV3 module, which wraps around the Graph.model function.
-Then we need to decode the result, getting top-N (N defaults to 5) predictions in human-readable format. The output is an array of tuple. Each tuple consists of a string for classified type description, and a float number ranging from 0 to 100 to represent the percentage probability of the input image actually being this type. Finally, if you want, you can pretty-print the result.
-Now that the whole script is ready, we can wrap it into a zoo gist. Then all it takes for the user is just one line:
-
-
owl -run 6dfed11c521fb2cd286f2519fb88d3bf
-
That’s it. This one-liner is all you need to do to see an image classification example in action. Here is the output (assume using the panda image previously mentioned):
-
-
Top 5 Predictions:
-Prediction #0 (96.20%) : giant panda, panda, panda bear, coon bear, Ailuropoda melanoleuca
-Prediction #1 (0.12%) : lesser panda, red panda, panda, bear cat, cat bear, Ailurus fulgens
-Prediction #2 (0.06%) : space shuttle
-Prediction #3 (0.04%) : soccer ball
-Prediction #4 (0.03%) : indri, indris, Indri indri, Indri brevicaudatus
-
If you are not interested in installing anything, here is a web-based demo of this image classification application powered by Owl. Please feel free to play with it! And the server won’t store your image. Actually, if you are so keen to protect your personal data privacy, then you definitely should try to pull the code here and fast build a local image processing service without worrying your images being seen by anybody else.
-
-
-Applications
-Building an image classification application is not the end by itself. It can be used in a wide range of applications.
-
-- Face recognition. If you have a Facebook account, it must be very familiar to you how your friends are tagged in your uploaded photo.
-- Photo organisation. Take Eden Photo, a Mac application, for an example. It automatically provides tags and keywords to a photo, so as to provide powerful photo categorisation and enhanced user experience.
-- Self-driving cars. The image recognition is no doubt the core part in self-driving technology, by identifying objects on the road.
-- Medical imaging. This technology can be used to enhance cancer detection and MRIs etc. by automatically detect signs diseases in medical images.
-
-That’s just a small number of examples of the usage of image recognition. Actually, image recognition is often one fundamental step for many computer vision tasks, including the instance segmentation and image style transfer we will talk about in the next chapters. That’s why Google and Microsoft both provide their cloud-based Vision APIs.
-
-
-Summary
-In this chapter, we first review how the existing state-of-art DNN architectures are developed step by step. This case demonstrates that, with a typical architecture InceptionV3, the full cycle of performing image classification using this architectures. It includes how the network is constructed, how the model weights are imported, the image processing in OCaml, and how the inference is performed. We also show how this process can be greatly simplified by using the Zoo system we have previously introduced. Finally, some prominent application field of image classification is briefly discussed.
-
-
-
- Next: Chapter 29Case - Instance Segmentation
\ No newline at end of file
diff --git a/docs/case-nst.html b/docs/case-nst.html
deleted file mode 100644
index 9f7ba7d..0000000
--- a/docs/case-nst.html
+++ /dev/null
@@ -1,265 +0,0 @@
-Case - Neural Style Transfer - Owl Online Tutorials
-Case - Neural Style Transfer
-What is Neural Style Transfer (NST)? It is “the process of using DNN to migrate the semantic content of one image to different styles”, a pretty cool application of the deep neural network. The idea is actually very simple. As the [@fig:case-nst:example_01] shows, this application takes two images A and B as input. Let’s say A is a normal street view, and B is “The Starry Night” of Vincent van Gogh. We then specify A as the “content image” and B as the “style image”. What a NST application can produce is a new street view image with the style of Van Gogh. If you want another style, just replace image B and run the application again. Impressionism, abstractionism, classical art, you name it. Or you can also apply the same “Starry Sky” style to any other images.
-
- Example of applying neural style transfer on a street view picture
-
-
-
Example of applying neural style transfer on a street view picture
-
-
-Content and Style
-The paper [@gatys2015neural] first proposes to use DNN to let programmes to create artistic images of high perceptual quality. In this section, we will first introduce the intuition about how the neural style transfer algorithm works. For more formal and detailed introduction, please visit the original paper.
-The basic idea is plain: we want to get an image whose content is similar to one image and its artistic style close to the other image. Of course, to make the algorithm work, first we need to express this sentence in mathematical form so that computers can understand it. Let’s assume for a moment we have already known that, then style transfer can be formalised as an optimisation problem. Given a content image c and a style image s, our target is to get an output image x so that it minimises:
-\[g(x) = \verb|content_distance|(x, c) + \verb|style_distance|(x, s)\]
-Here the “distance” between two feature maps is calculated by the Euclidean distance between the two ndarrays.
-You may remember from the regression or neural network chapters that training process is also an optimisation process. However, do not mistake the optimisation in NST as regression or DNN training. For the latter one, there is the function \(f_w\) that contains parameter \(w\) and the training process optimises \(w\) to minimise \(f_w(x)\). The optimisation in NST is more like the traditional optimisation problem: we have a function \(f\), and we start with an initial input \(x_0\) and update it iteratively until we have satisfying \(x\) that minimise the target function.
-Now we can come back to the key problem. While we human beings can kind of feel the style of paint and visually recognise the contents in a picture, how can we mathematically express the “content” and the “style” of an image? That’s where the convolution network comes to help. DNNs, especially the ones that are used for computer vision tasks, are found to be a convenient tool to capture the characteristics of an image. We have demonstrate in the previous chapter how CNNs are good at spotting the “features” in an image layer by layer. Therefore, in the next two sub-sections, we will explain how it can be used to express the content and style feature of an image.
-We have introduced several CNN architectures to perform image detection task in the previous chapter. We choose to use the VGG19 since it follows a simple linear stack structure and is proved to have good performance. We have built the VGG19 network structure in this gist. It contains 38 layers in total, and we prepared pre-trained weights for it.
-
-Content Reconstruction
-From the image detection case, we know that the CNN extract features layer by layer until the features are so abstract that it can give an answer such as “this is a car” “this is an apple” etc. Therefore, we can use the feature map to reconstruct content of an image.
-But which layer’s output should we use as a suitable indication of the image content? Let’s perform a simplified version of NST: we only care about re-constructing the content of the input image, so our target is to minimise:
-\[f(x) = \verb|content_distance|(x, c)\]
-As an example, we use [@fig:case-nst:content-example] as the target content. (This image “Tourists in Nanzen-Ji Hojo” by blieusong is licensed under CC BY-SA 2.0.)
-
- Example content image in neural style transfer
-
-
Example content image in neural style transfer
-
-Suppose we choose the output of the idx layer as the chosen feature map to represent the content. First, we need to compute the target feature map:
-
-
let fill_content_targets x net =
- let selected_topo = Array.sub nn.topo 0 (idx + 1) in
- run' selected_topo x
-
The function fill_content_targets takes the content image and the VGG network as input, and returns the target feature map as output. We only need to compute the feature map of the target content image once.
-Here the run' function is implemented by accumulating the inference result along the selected part of the network, from the network input until the chosen layer, instead of processing the whole network:
-
-
let run' topo x =
- let last_node_output = ref (F 0.) in
- Array.iteri (fun i n ->
- let input = if i = 0 then x else !last_node_output in
- let output = run [|input|] n.neuron in
- last_node_output := output;
- ) topo;
- !last_node_output
-
Then we can start optimising the input image x. Let’s set the initial x to be a “white noise” image that only contains random pixels. This image has the same shape as the content image.
-
-
let input_shape = Dense.Ndarray.S.shape content_img in
-Dense.Ndarray.S.(gaussian input_shape |> scalar_mul 0.256)
-
The feature map of the input image x is still calculated using the same process shown in the function fill_content_targets. We call the resulting feature map response, then the loss value can be calculated with the L2Norm of the difference between two feature maps, and then normalised with the feature map size.
-
-
let c_loss response target =
- let loss = Maths.((pow (response - target) (F 2.)) |> sum') in
- let _, h, w, feature = get_shape target in
- let c = float_of_int ( feature * h * w ) in
- Maths.(loss / (F c))
-
Once the loss value is calculated, we can apply optimisers. Here we use the minimise_fun from Optimise module. The target function can be described as:
-
-
let g x =
- fill_losses x;
- c_loss response target
-
All it performs is what we just described: first calculating the feature map response of input image at a certain layer, and then computing the distance between it and the target content feature map as the loss value.
-Finally, we can perform the optimisation iterations:
-
-
let state, img = Optimise.minimise_fun params g (Arr input_img) in
-let x' = ref img in
-while Checkpoint.(state.current_batch < state.batches) do
- Checkpoint.(state.stop <- false);
- let a, img = Optimise.minimise_fun ~state params g !x' in
- x' := img
-done;
-
We keep updating the image x for a fixed number of iterations. Particularly, we use the Adam adaptive learning rate method, for it proves to be quite effective in style transfer optimisation:
-
-
let params = Params.config
- ~learning_rate:(Learning_Rate.Adam (learning_rate, 0.9, 0.999))
- ~checkpoint:(Checkpoint.Custom chkpt)
- iter
-
Using the process above, we return to the problem of choosing a suitable layer as the indication of the image content. In this 38-layer VGG network, some frequently used practical choices are these layers: 2, 7, 12, 21, 30. Then we can compare the optimisation results to see the effect of image reconstruction. Each one is generated after 100 iterations.
-
- Contents reconstruction from different layers
-
-
Contents reconstruction from different layers
-
-It is shown in [@fig:case-nst:contents-rec] that, the content information is kept accurate at the low layers. Along the processing hierarchy of the network, feature map produced by the lower layer cares more about the small features that at the pixel level, while the higher layer gives more abstract information but less details to help with content reconstruction.
-
-
-Style Recreation
-Then similarly, we explore the other end of this problem. Now we only care about recreating an image with only the style of an input image. That is to say, we optimise the input image with this target to minimise:
-\[h(x) = \verb|style_distance|(x, s)\]
-As an example, we will use the famous “The Great Wave of Kanagawa” by Hokusai as our target style image:
-
- Example style image in neural style transfer
-
-
Example style image in neural style transfer
-
-The basic approach is the same as before: first compute the style representation of target image using the output from one or more layers, and then compute the style representation of the input image following the same method. The normalised distance between these two ndarrays are used as the optimisation target.
-However, the difference is that, unlike the content representation, we cannot directly take one filter map from certain layer as the style representation. Instead, we need to t computes the correlations between different filters from the output of a layer. This correlation can be represented by the Gram matrix, which intuitively captures the “distribution of features” of feature maps from a certain layer. The \((i,j)\)-th element of a Gram matrix is computed by element-wisely multiplying the \(i\)-th and \(j\)-th channels in the feature maps and summing across both width and height. This process can be simplified as a matrix multiplication. The result is normalised with the size of the feature map. The code is shown below.
-
-
let gram x =
- let _, h, w, feature = get_shape x in
- let new_shape = [|h * w; feature|] in
- let ff = Maths.(reshape x new_shape) in
- let size = F (float_of_int (feature * h * w)) in
- Maths.((transpose ff) *@ ff / size)
-
Now that we have a method to represent the “style” of an image, we can proceed to calculate the loss value during optimisation. It is very similar to that of content recreation, and the only difference is that we use the distance between Gram matrices instead of the feature maps from a certain layer as loss value.
-
-
let s_loss response_gram target_gram =
- let loss = Maths.((pow (response_gram - target_gram) (F 2.)) |> sum') in
- let s = Algodiff.shape target_gram in
- let c = float_of_int (s.(0) * s.(1)) in
- Maths.(loss / (F c))
-
However, note that for the optimisation, instead of using output from one layer, we usually utilises the loss values from multiple layers and the optimisation target for style reconstruction:
-
-
let h x =
- fill_losses x;
- Array.fold_left Maths.(+) (F 0.) style_losses
-
Here the fill_losses function compute style losses at different layers, and store them into the style_losses array. Then they are added up as the optimisation target. The rest process is the same as in the content reconstruction.
-In this example, we choose the same five layers from the VGG19 network: layer 2, 7, 12, 21, and 30. Then we compute the aggregated loss value of the first layer, the first two layers, the first three layers, the first four layers, and all layers, as five different optimisation target. Optimising these five different target, the resulting images are shown in [@fig:case-nst:style-rec].
-
- Style reconstruction from different layers
-
-
Style reconstruction from different layers
-
-As the result shows, features from the beginning tends to contain low level information such as pixels, so reconstructing styles according to them results in a fragmented white-noise-like representation, which really does not show any obvious style. Only by adding more deep layer features can the style be gradually reconstructed. The fifth generated image shows a quite obvious wave-like style.
-
-
-Combining Content and Style
-Now that we have seen these two extremes: only recreating content and only recreating style, it’s straightforward to understand the theory of style transfer: to synthesise an image that has similar content with one image and style close to the other. The code would be mostly similar to what we have seen, and the only difference now is simply adding the loss value of content and styles as the final optimisation target.
-One thing we need to note during combining contents and style is the proportion of each part, and the choice of layers as representation. This problem is actually more artistic than technique, so here we only follow the current practice about parameter configuration. Please refer to the original paper about the effect of parameter tuning.
-As suggested by previous experiment results, we use the feature maps from 23rd layer for content recreation, and combine the output of layer 2, 7, 12, 21, and 30 in VGG19 to represent the style feature of an image. When combining the loss values, we multiply the style loss with a weight number, and then add it to the content loss. Practice shows that a weight number of 20 shows good performance.
-You might also be wondering: why not choose the 2nd layer if it show the best content reconstruction result? The intuition is that we don’t want the synthesised image to be too close to the content image in content, because that would mean less style. Therefore we use a layer from the middle of CNN which shows to keep most of the information for content reconstruction.
-
- Combining content and style reconstruction to perform NST
-
-
Combining content and style reconstruction to perform NST
-
-Combining all these factors together, [@fig:case-nst:nst_example_01] shows the result of running our code and creating an artistic view based on the original image.
-All the code (about 180 lines) is included in this gist. The pre-trained weight file for VGG19 is also included. As with the image detection applications, it also relies on the tool ImageMagick to manipulate image format conversion and resizing. We only list part of it above, and many implementation details such as garbage collection are omitted to focus on the theory of the application itself. We therefore suggest you to play with the code itself with images or parameters of your choice.
-
-
-Running NST
-To make the code above more suitable to use, this NST application provides a simple interfaces to use. Here is an example showing how to use it with two lines of code:
-
-
#zoo "6f28d54e69d1a19c1819f52c5b16c1a1"
-
-Neural_transfer.run
- ~ckpt:50
- ~src:"path/to/content_img.jpg"
- ~style:"path/to/style_img.jpg"
- ~dst:"path/to/output_img.png" 250.;;
-
Similar to the image detection application, the command can be simplified using the Zoo system in owl. The first line downloads gist files and imported this gist as an OCaml module, and the second line uses the run function to produce an output image to your designated path. Its syntax is quite straightforward, and you may only need to note the final parameter. It specifies how many iterations the optimisation algorithm runs. Normally 100 ~ 500 iterations is good enough.
-This module also supports saving the intermediate images to the same directory as output image every N iterations (e.g. path/to/output_img_N.png). N is specified by the ckpt parameter, and its default value is 50 iterations. If users are already happy with the intermediate results, they can terminate the program without waiting for the final output image.
-That’s all. Now you can try the code easily. If you don’t have suitable input images at hand, the gist already contains exemplar content and style images to get you started. More examples can be seen on our online demo page.
-
-
-
-Extending NST
-The neural style transfer has attracted a lot of attention since its publication. It is the core technology of many successful industrial applications, most notably photo rendering applications. For example, the Prisma Photo Editor features transforming your photos into paintings of hundreds of styles.
-There are also many research work that aim to extend this work. One of these work is the Deep Photo Style Transfer proposed in [@luan2017deep]. The idea is simple: instead of using an art image, can I use another normal image as style reference? For example, we have a normal daylight street view in New York as a content image, and then we want to use the night view of London as reference, to synthesise an image of the night view of New York.
-The authors identify two key challenges in this problem. The first is that, unlike in NST, we hope to only change to colours of the style image, and keep the content un-distorted, so as to create a “real” image as much as possible. For this challenge, the authors propose to add a regularisation item to our existing optimisation target “content distance + style distance”. This item, depending on only input and output images, penalises image distortion and seeks an image transform that is locally affine in colour space. The second challenge is that, we don’t want the styles to be applied globally. For example, we only want to apply the style of an sunset sky to a blue sky, not a building. For this problem, the authors propose to coarsely segment input images into several parts before apply style transfer separately. If you are interested to check the original paper, the resulting photos are indeed beautifully and realistically rendered.
-Another similar application is the “image-to-image translation”. This computer vision broadly involves translating an input image into certain output image. The style transfer or image colourisation can be seen as examples of it. There are also applications that change the lighting/weather in a photo. These can also be counted as examples of image to image translation.
-In [@isola2017image] the authors propose to use the Generative Adversarial Networks (GANs) to provide general framework for this task. In GAN, there are two important component: the generator, and the discriminator. During training, the generator synthesises images based on existing parameters, and the discriminator tries its best to separate the generated data from true data. This process is iterated until the discriminator can no longer tell the difference between these two. The work in [@isola2017image] utilises convolution neural network to construct the generator and discriminator in the GAN. This approach is successfully applied in many applications, such as Pix2Pix, face ageing, increase photo resolution, etc.
-Another variant is called the Fast Style Transfer. Instead of iteratively updating image, it proposes to use one pre-trained feed-forward network to do the style transfer, and therefore improve the speed of rendering by orders of magnitude. That’s what we will be talking about in the rest of this chapter.
-
-
-Fast Style Transfer
-One disadvantage of NST is that it could take a very long time to rendering an image, and if you want to change to another content or style image, then you have to wait a long time for the training again. If you want to render some of your best (or worst) selfies fast and send to your friends, NST is perhaps not a perfect choice.
-This problem then leads to another application: Fast Neural Style Transfer (FST). FST sacrifice certain degrees of flexibility, which is that you cannot choose style images at will. But as a result, you only need to feed your content image to a DNN, finish an inference pass, and then the output will be the rendered styled image as you expected. The best part is that, one inference pass is much faster than keep running a training phase.
-
-Building FST Network
-The Fast Style Transfer network is proposed in [@Johnson2016Perceptual]. The authors propose to build and train an image transformation network. Image transformation is not a totally new idea. It takes some input image and transforms it into a certain output image. One way to do that is to train a feed-forward CNN. This method is applied in different applications such as colourising grayscale photos or image segmentation. In this work the author use a similar approach to solve the style transfer problem.
-
- System overview of the image transformation network and its training.
-
-
System overview of the image transformation network and its training.
-
-[@fig:case-nst:fst] shows a system overview of the image transformation network and its training. It can be divided into two parts. The first part includes the image transformation network architecture. To synthesise an image of the same size as input image, it first uses down-sampling layers, and then the up-sampling layers. One benefit of first down-sampling images is to reduce the computation, which enables building a deeper network. We have already seen this design principle in the image detection case chapter.
-Instead of using the normal pooling or upsampling layer in CNN, here the convolution layers are used for down/up-sampling. We want to keep the image information as much as possible during the whole transformation process. Specifically, we use the transpose convolution for upsampling. This operation goes the opposite direction of a normal convolution, from small feature size to larger one, and still maintains the connectivity pattern in convolution.
-
-
open Owl
-open Neural.S
-open Neural.S.Graph
-open Neural.S.Algodiff
-module N = Dense.Ndarray.S
-
-let conv2d_layer ?(relu=true) kernel stride nn =
- let result =
- conv2d ~padding:SAME kernel stride nn
- |> normalisation ~decay:0. ~training:true ~axis:3
- in
- match relu with
- | true -> (result |> activation Activation.Relu)
- | _ -> result
-
-let conv2d_trans_layer kernel stride nn =
- transpose_conv2d ~padding:SAME kernel stride nn
- |> normalisation ~decay:0. ~training:true ~axis:3
- |> activation Activation.Relu
-
Here, combined with batch normalisation and Relu activation layers, we build two building blocks: the conv2d_layer and the conv2d_trans_layer. Think of them as enhanced convolution and transpose convolution layers. The benefit of adding these two types of layers is discussed in previous chapter.
-What connect these two parts are multiple residual blocks, which is proposed in the ResNet architecture. The authors claim that using residual connections makes it easier to keep the structure between output and input. It is an especially attractive property for an style transfer neural networks. Specifically, the authors use the residual structure proposed in the ResNet. All the convolution layers use the common 3x3 kernel size. This residual block can be implemented with the conv2d_layer unit we have built.
-
-
-let residual_block wh nn =
- let tmp = conv2d_layer [|wh; wh; 128; 128|] [|1;1|] nn
- |> conv2d_layer ~relu:false [|wh; wh; 128; 128|] [|1;1|]
- in
- add [|nn; tmp|]
-
Here in the code the wh normally takes a value of 3. The residual block, as with in the ResNet, is repeatedly stacked for several times. With these three different parts ready, finally we can piece them together. Note how the output channel of each convolution increases, stays the same, and then decreases symmetrically. Before the final output, we use the tanh activation layer to ensure all the values are between [0, 255] for the output image.
-
-
let make_network h w =
- input [|h;w;3|]
- |> conv2d_layer [|9;9;3;32|] [|1;1|]
- |> conv2d_layer [|3;3;32;64|] [|2;2|]
- |> conv2d_layer [|3;3;64;128|] [|2;2|]
- |> residual_block 3
- |> residual_block 3
- |> residual_block 3
- |> residual_block 3
- |> residual_block 3
- |> conv2d_trans_layer [|3;3;128;64|] [|2;2|]
- |> conv2d_trans_layer [|3;3;64;32|] [|2;2|]
- |> conv2d_layer ~relu:false [|9;9;32;3|] [|1;1|]
- |> lambda (fun x -> Maths.((tanh x) * (F 150.) + (F 127.5)))
- |> get_network
-
After constructing the image transformation network, let’s look at the training process. In previous work, when training a image transformation network, normally the output will be compared with the ground-truth image pixel-wisely as the loss value. That is not an ideal approach here since we cannot know what is a “correct” style-transferred image in advance. Instead, the authors are inspired by the NST work. They use the same training process with a pre-trained VGG19 network to compute the loss (they call it the perceptual loss against the per-pixel loss, since high level perceptual information is contained in this loss).
-We should be familiar with the training process now. The output image \(x\) from image transformation network is the one to be optimised. The input image itself is content image, and we provide another fixed style image. We can then proceed to calculate the final loss by computing the distance between image \(x\) and the input with regard to content and styles. All of these are the same as in the NST. The only difference is that, where we train an image before, now we train the weights of the image transformation network during back-propagation. Note that this process means that we can only train one set of weight for only one style. Considering that the artistic styles are relatively fixed compared to the unlimited number of content image, and the orders of magnitude of computation speed improved, fixing the styles is an acceptable trade-off.
-Even better, this training phase is one-off. We can train the network once and the reuse it in the inference phase again and again. We refer you to the original paper if you want to know more details about the training phase. In our implementation, we directly convert and import weights from a TensorFlow implementation. Next we will show how to use it to perform the fast style transfer.
-
-
-Running FST
-Like NST and image classification, we have wrapped all things up in a gist, and provide a simple user interface to users. Here is an example:
-
-
#zoo "f937ce439c8adcaea23d42753f487299"
-
-FST.list_styles ();; (* show all supported styles *)
-FST.run ~style:1 "path/to/content_img.png" "path/to/output_img.jpg"
-
The run function mainly takes one content image and output to a new image file, the name of which is designated by the user. The image could be of any popular formats: jpeg, png, etc. This gist contains exemplar content images for you to use. A set of trained weight for the FST DNN represents a unique artistic style. We have already included six different weight files for using, and the users just need to pick one of them and load them into the DNN, without worrying about how to train these weights.
-Current we support six art styles: “Udnie” by Francis Picabia, “The Great Wave off Kanagawa” by Hokusai, “Rain Princess” by Leonid Afremov, “La Muse” by Picasso, “The Scream” by Edvard Munch, and “The shipwreck of the Minotaur” by J. M. W. Turner. These style images are shown in [@fig:case-nst:fst-styles].
-
- Artistic Styles used in fast style transfer
-
-
Artistic Styles used in fast style transfer
-
-Maybe six styles are not enough for you. But think about it, you can now render any of your image to a nice art style fast, maybe about half a minute. It would be even faster if you are using GPU or other accelerators. As an example, we use the Willis Tower in Chicago as an input image:
-
- Example input image: Willis tower of Chicago
-
-
-
Example input image: Willis tower of Chicago
-
-
- Fast style transfer examples
-
-
Fast style transfer examples
-
-We then apply FST on this input image with the styles shown above. The rendered city view with different styles are shown in [@fig:case-nst:fst-example]. Each of them rendered in only seconds on a moderate CPU desktop.
-Moreover, based these code, we have built a demo website for the FST application. You can choose a style, upload an image, get yourself a cup of coffee, and then checkout the rendered image. To push things even further, we apply FST to some videos frame-by-frame, and put them together to get some artistic videos, as shown in this Youtube list. You are welcome to try this application with images of your own.
-
-
-
-Summary
-During the development of Owl, we have built the style transfer application to benchmark the expressiveness and performance of Owl. In this chapter we introduce this use case in detail, including the theory behind style transfer application, our implementation detail, and examples. The NST application is extended in many ways, one of which is the fast style transfer. We then introduce how this application works with example. Theories aside, we quite enjoy ourselves in building and using these style transfer applications. Hope this chapter can also help you to better understand this state-of-art DNN application.
-
-
-
- Next: Chapter 31Case - Recommender System
\ No newline at end of file
diff --git a/docs/case-obj-detect.html b/docs/case-obj-detect.html
deleted file mode 100644
index 49a8252..0000000
--- a/docs/case-obj-detect.html
+++ /dev/null
@@ -1,176 +0,0 @@
-Case - Instance Segmentation - Owl Online Tutorials
-Case - Instance Segmentation
-Computer vision is a field dealing with many different automated tasks whose goal are to give high-level descriptions of images and videos. It has been applied to a wide variety of domains ranging from highly technical ones, such as automatic tagging of satellite images, analysis of medical images etc., to more mundane applications, including categorising pictures in your phone, making your face into an emoji, etc. This field has seen tremendous progress since 2012, when A. Krizhevsky et al. used the first deep learning approach to computer vision, crushing all their opponents in the ImageNet challenge. We have already discussed this image recognition task in the previous chapter.
-In this chapter, we are going to introduce another classical computer vision task: the Instance Segmentation, which is to give different labels for separate instances of objects in an image. We will discuss its connection with other similar applications, how the deep neural network is constructed in Owl, and how the network, loaded with pre-trained weights, can be used to process users’ input images. We have also included an online demo for this application. Let’s begin!
-
-Introduction
-In the previous chapter about the image recognition task, we have introduced how the DNN can be applied to classify the one single object in an image. However, this technique can easily get confused if it is applied on an image with multiple objects, which frequently happens in the real world. That’s why we need other methods.
-For example, Object Detection is another classical computer vision task. Given an image that contains multiple objects, an object detection application aims to classify individual objects and localize each one using a bounding box, as shown in the [@fig:case-obj-detect:example_obj].
- Example of object detection (src)
Example of object detection (src)
-Similarly, the Semantic Segmentation task requires to classify the pixels on an image into different categories. Each segment is recognised by a “mask” that follows cover the whole object. This can be illustrated in the [@#fig:case-obj-detect:example_seg].
- Example of semantic segmentation (src)
Example of semantic segmentation (src)
-In 2017, the Mask R-CNN (Mask Region-based Convolutional Neural Network) architecture was published. With sufficient training, it can solve these problems at once: it can detect objects on an image, label each of them, and provide a binary mask to tell which pixels belong to the objects. This task is called the Instance Segmentation. As a preliminary example and visual motivation, the examples below show what this task generates:
-
- Example: Street view
-
-
-
Example: Street view
-
-
- Example: Sheep
-
-
Example: Sheep
-
-In these two examples, normal pictures are processed by the pre-trained Mask R-CNN (MRCNN) network, and the objects (people, sheep, bag, car, bus, umbrella, etc.) are segmented from the picture and recognised with a percentage of confidence, represented by a number between 0 and 1.
-Image segmentation have massive application scenarios in the industry, such as medical imaging (locating tumours, detecting cancer cells …), traffic control systems, locate objects in satellite images, etc. The Mask R-CNN network has been implemented in Owl. In the next sections, we will explain how this network is constructed.
-
-
-Mask R-CNN Network
-This section will briefly outline the main parts of architecture of Mask R-CNN and how it stands out from its predecessors. You can get more detailed and technical explanations in the original paper [@he2017mask]. The Owl implementation of the inference mode is available in this repository. The code was mostly ported from the Keras/TensorFlow implementation. Work in this chapter is conducted by Pierre Vandenhove during his internship in the OCamlLabs.
-MRCNN network is extended based on the Faster R-CNN network [@ren2015faster], which itself extends the Fast R-CNN [@girshick2015fast]. In Fast R-CNN, the authors propose a network that accepts input images and regions of interest (RoI). For each region, features are extracted by several fully-connected layers, and the features are fed into a branch. One output of this branch contains the output classification (together with possibility of that classification) of the object in that region, and the other specifies the rectangle location of the object.
-In Faster R-CNN, the authors point out that, there is no need to find RoIs using other methods than the network itself. They propose a Region Proposal Network (RPN) that share the same feature extraction backbone as that in Fast R-CNN. RPN is a small convolutional network that scans the feature maps quickly, produces a set of rectangular possible object region proposals, each associated with a number that could be called the objectness of that region. The RoI feature extraction part of Fast R-CNN is kept unchanged here. In this way, a single Faster R-CNN network can be trained and then perform the object detection task without extra help from other region proposal methods.
-To perform the task of not just objection detection, but also semantic segmentation, Mask R-CNN keeps the architecture of Faster R-CNN, only adding an extra branch in the final stage of its RoI feature layer. Where previously the outputs includes object classification and location, now a third branch contains information about the mask of object in the RoI. Therefore, for any RoI, the Mask R-CNN can retrieve its rectangle bound, classification results, classification possibility, and the mask of that object, all information in one pass.
-
-
-Building Mask R-CNN
-After a quick introduction of the MRCNN and how it is developed in theory, let’s look at the code to understand how it is constructed in Owl, one piece at a time. Please feel free to jump this part if you are eager to try to run the code and process one of your images.
-
-
open Owl
-
-module N = Dense.Ndarray.S
-
-open CGraph
-open Graph
-open AD
-
-module RPN = RegionProposalNetwork
-module PL = ProposalLayer
-module FPN = FeaturePyramidNetwork
-module DL = DetectionLayer
-module C = Configuration
-
-let image_shape = C.get_image_shape () in
-if image_shape.(0) mod 64 <> 0 || image_shape.(1) mod 64 <> 0 then
-invalid_arg "Image height and width must be divisible by 64";
-
-let inputs = inputs
- ~names:[|"input_image"; "input_image_meta"; "input_anchors"|]
- [|image_shape; [|C.image_meta_size|]; [|num_anchors; 4|]|] in
-let input_image = inputs.(0)
-and input_image_meta = inputs.(1)
-and input_anchors = inputs.(2) i
-
The network accepts three inputs, representing images, meta data, and number of anchors (the rectangular regions). The Configuration module contains a list of constants that will be used in building the network.
-
-
-Proposal Generation
-To try to locate the objects, about 250,000 overlapping rectangular regions or anchors are generated.
-
-
let nb_ratios = Array.length C.rpn_anchor_ratios in
-let rpns = Array.init 5 (fun i ->
- RPN.rpn_graph rpn_feature_maps.(i)
- nb_ratios C.rpn_anchor_stride
- ("_p" ^ string_of_int (i + 2))) in
-let rpn_class = concatenate 1 ~name:"rpn_class"
- (Array.init 5 (fun i -> rpns.(i).(0))) in
-let rpn_bbox = concatenate 1 ~name:"rpn_bbox"
- (Array.init 5 (fun i -> rpns.(i).(1)))
-
Single RPN graphs are applied on different features in rpn_features_maps, and the results from these networks are then concatenated together. For each bounding box on the image, the RPN returns the likelihood that it contains an object and a refinement for the anchor, both are represented by rank-3 ndarrays.
-Next, in the proposal layer, the 1000 best anchors are then selected according to their objectness (higher is better). Anchors that overlap too much with each other are eliminated, to avoid detecting the same object multiple times. Each selected anchor is also refined in case it was not perfectly centred around the object.
-
-
let rpn_rois =
- let prop_f = PL.proposal_layer C.post_nms_rois C.rpn_nms_threshold in
- MrcnnUtil.delay_lambda_array [|C.post_nms_rois; 4|] prop_f ~name:"ROI"
- [|rpn_class; rpn_bbox; input_anchors|] in
-
The proposal layer picks the top anchors from the RPN output, based on non maximum suppression and anchor scores. It then applies the deltas to the anchors.
-
-
-Classification
-All anchor proposals from the previous layer are resized to a fixed size and fed into a 10-layer neural network. The network assigns each of them the probability that it belongs to each class. The network is pre-trained on fixed classes; changing the set of classes requires to re-train the whole network. Note that this step does not take as much time for each anchor as a full-fledged image classifier such as Inception, since it reuses the pre-computed feature maps from the Feature Pyramid Network. Therefore there is no need to go back to the original picture. The class with the highest probability is chosen for each proposal, and, thanks to the class predictions, the anchor proposals are even more refined. Proposals classified in the background class are deleted. Eventually, only the proposals with an objectness over some threshold are kept, and we have our final detections, each having a bounding box and a label.
-
-
let mrcnn_class, mrcnn_bbox =
-FPN.fpn_classifier_graph rpn_rois mrcnn_feature_maps input_image_meta
- C.pool_size C.num_classes C.fpn_classif_fc_layers_size in
-
-let detections = MrcnnUtil.delay_lambda_array [|C.detection_max_instances; 6|]
- (DL.detection_layer ()) ~name:"mrcnn_detection"
- [|rpn_rois; mrcnn_class; mrcnn_bbox; input_image_meta|] in
-let detection_boxes = lambda_array [|C.detection_max_instances; 4|]
- (fun t -> Maths.get_slice [[]; []; [0;3]] t.(0))
- [|detections|]
-
A Feature Pyramid Network classifier associates a class to each proposal and refines the bounding box for that class even more. The only thing left to do is to generate a binary mask on each object. This is handled by a small convolutional neural network which produces a small square of values between 0 and 1 for each detected bounding box. This square is resized to the original size of the bounding box with bilinear interpolation, and pixels with a value over 0.5 are tagged as being part of the object.
-
-
let mrcnn_mask = FPN.build_fpn_mask_graph detection_boxes mrcnn_feature_maps
- input_image_meta C.mask_pool_size C.num_classes
-
And finally, the output contains detection results and masks from the previous steps.
-
-
outputs ~name:C.name [|detections; mrcnn_mask|]
-
Run the Code
-After getting to know the internal mechanism of the MRCNN architecture, we can then try run the code to see how it works. One example of using the MRCNN code is in this example script. The core part is listed below:
-
-
open Mrcnn
-
-let src = "image.png" in
-let fun_detect = Model.detect () in
-let Model.({rois; class_ids; scores; masks}) = fun_detect src in
-let img_arr = Image.img_to_ndarray src in
-let filename = Filename.basename src in
-let format = Images.guess_format src in
-let out_loc = out ^ filename in
-Visualise.display_masks img_arr rois masks class_ids;
-let camlimg = Image.img_of_ndarray img_arr in
-Visualise.display_labels camlimg rois class_ids scores;
-Image.save out_loc format camlimg;
-Visualise.print_results class_ids rois scores
-
The most important step is to apply the Model.detect function on the input images, which returns the region of interests, the classification result ID of the object in that region, the classification certainty scores, and a mask that shows the outline of that object in the region. With this information, the Visualise module runs for three passes on the original image: the first for adding bounding boxes and object masks, the second for adding the numbers close to the bounding box, and finally for printing out the resulting images from the previous two steps.
-In this example, the pre-trained weights on 80 classes of common objects are provided, which have been converted from the TensorFlow implementation mentioned above. As to the execution speed, processing one image with a size of 1024x1024 pixels takes between 10 and 15 seconds on a moderate laptop. You can try a demo of the network without installing anything.
-
-
-Summary
-This chapter introduces Instance Segmentation, another powerful computer vision task that is wildly used in various fields. It encompasses several different tasks, including image recognition, semantic segmentation, and object detection. This task can be performed with the Mask R-CNN network architecture. We explain in detail how it is constructed using the Owl code. Besides, we also provide example code and online demo so that the readers can try to play with this powerful application conveniently.
-
-
-
- Next: Chapter 30Case - Neural Style Transfer
\ No newline at end of file
diff --git a/docs/case-recommender.html b/docs/case-recommender.html
deleted file mode 100644
index b6f7391..0000000
--- a/docs/case-recommender.html
+++ /dev/null
@@ -1,380 +0,0 @@
-Case - Recommender System - Owl Online Tutorials
-Case - Recommender System
-
-Introduction
-Our daily life heavily relies on recommendations, intelligent content provision aims to match a user’s profile of interests to the best candidates in a large repository of options. There are several parallel efforts in integrating intelligent content provision and recommendation in web browsing. They differentiate between each other by the main technique used to achieve the goal.
-The initial effort relies on the semantic web stack, which requires adding explicit ontology information to all web pages so that ontology-based applications (e.g., Piggy bank) can utilise ontology reasoning to interconnect content semantically. Though semantic web has a well-defined architecture, it suffers from the fact that most web pages are unstructured or semi-structured HTML files, and content providers lack of motivation to adopt this technology to their websites. Therefore, even though the relevant research still remains active in academia, the actual progress of adopting ontology-based methods in real-life applications has stalled in these years.
-Collaborative Filtering (CF), which was first coined in 1992, is a thriving research area and also the second alternative solution. Recommenders built on top of CF exploit the similarities in users’ rankings to predict one user’s preference on a specific content. CF attracts more research interest these years due to the popularity of online shopping (e.g., Amazon, eBay, Taobao, etc.) and video services (e.g., YouTube, Vimeo, Dailymotion, etc.). However, recommender systems need user behaviour rather than content itself as explicit input to bootstrap the service, and are usually constrained within a single domain. Cross-domain recommenders have made progress lately, but the complexity and scalability need further investigation.
-Search engines can be considered as the third alternative though a user needs explicitly extract the keywords from the page then launch another search. The ranking of the search results is based on multiple ranking signals such as link analysis on the underlying graph structure of interconnected pages such as PageRank. Such graph-based link analysis is based on the assumption that those web pages of related topics tend to link to each other, and the importance of a page often positively correlates to its degree. The indexing process is modelled as a random walk atop of the graph derived from the linked pages and needs to be pre-compiled offline.
-The fourth alternative is to utilise information retrieval (IR) technique. In general, a text corpus is transformed to the suitable representation depending on the specific mathematical models (e.g., set-theoretic, algebraic, or probabilistic models), based on which a numeric score is calculated for ranking. Different from the previous CF and link analysis, the underlying assumption of IR is that the text (or information in a broader sense) contained in a document can very well indicate its (latent) topics. The relatedness of any two given documents can be calculated with a well-defined metric function atop of these topics. Since topics can have a direct connection to context, context awareness therefore becomes the most significant advantage in IR, which has been integrated into Hummingbird, Google’s new search algorithm.
-In the rest of this chapter, we will introduce Kvasir, a system built on top of latent semantic analysis. Kvasir automatically looks for the similar articles when a user is browsing a web page and injects the search results in an easily accessible panel within the browser view for seamless integration. Kvasir belongs to the content-based filtering and emphasises the semantics contained in the unstructured web text. This chapter is based on the papers in [@7462177] and [@7840682], and you will find that many basic theory are already covered previously in the NLP chapter in Part I. Henceforth we will assume you are familiar with this part.
-
-
-Architecture
-At the core, Kvasir implements an LSA-based index and search service, and its architecture can be divided into two subsystems as frontend and backend. Figure [@fig:case-recommender:architecture] illustrates the general workflow and internal design of the system. The frontend is currently implemented as a lightweight extension in Chrome browser. The browser extension only sends the page URL back to the KServer whenever a new tab/window is created. The KServer running at the backend retrieves the content of the given URL then responds with the most relevant documents in a database. The results are formatted into JSON strings. The extension presents the results in a friendly way on the page being browsed. From user perspective, a user only interacts with the frontend by checking the list of recommendations that may interest him.
-
- Kvasir architecture with components numbered based on their order in the workflow
-
-
Kvasir architecture with components numbered based on their order in the workflow
-
-To connect to the frontend, the backend exposes one simple RESTful API as below, which gives great flexibility to all possible frontend implementations. By loosely coupling with the backend, it becomes easy to mash-up new services on top of Kvasir. In the code below, Line 1 and 2 give an example request to Kvasir service. type=0 indicates that info contains a URL, otherwise info contains a piece of text if type=1. Line 4-9 present an example response from the server, which contains the meta-info of a list of similar articles. Note that the frontend can refine or rearrange the results based on the meta-info (e.g., similarity or timestamp).
-
-
POST https://api.kvasir/query?type=0&info=url
-
-{"results": [
- {"title": document title,
- "similarity": similarity metric,
- "page_url": link to the document,
- "timestamp": document create date}
-]}
-
The backend system implements indexing and searching functionality which consist of five components: Crawler, Cleaner, DLSA, PANNS and KServer. Three components (i.e., Cleaner, DLSA and PANNS) are wrapped into one library since all are implemented on top of Apache Spark. The library covers three phases as text cleaning, database building, and indexing. We briefly present the main tasks in each component as below.
-Crawler collects raw documents from the web and then compiles them into two data sets. One is the English Wikipedia dump, and another is compiled from over 300 news feeds of the high-quality content providers such as BBC, Guardian, Times, Yahoo News, MSNBC, etc. [@tbl:case-recommender:dataset] summarises the basic statistics of the data sets. Multiple instances of the Crawler run in parallel on different machines. Simple fault-tolerant mechanisms like periodical backup have been implemented to improve the robustness of crawling process. In addition to the text body, the Crawler also records the timestamp, URL and title of the retrieved news as meta information, which can be further utilised to refine the search results.
-
-Two data sets are used in Kvasir evaluation {#tbl:case-recommender:dataset}
-
-
-
-
-
-| Wikipedia |
-\(3.9\times~10^6\) |
-47.0 GB |
-Avg. 782 words |
-
-
-| News |
-\(4.6\times~10^5\) |
-1.62 GB |
-Avg. 648 words |
-
-
-
-Cleaner cleans the unstructured text corpus and converts the corpus into term frequency-inverse document frequency (TF-IDF) model. In the preprocessing phase, we clean the text by removing HTML tags and stop words, de-accenting, tokenisation, etc. The dictionary refers to the vocabulary of a language model. Its quality directly impacts the model performance. To build the dictionary, we exclude both extremely rare and extremely common terms, and keep \(10^5\) most popular ones as features. More precisely, a term is considered as rare if it appears in less than 20 documents, while a term is considered as common if it appears in more than 40% of documents.
-DLSA builds up an LSA-based model from the previously constructed TF-IDF model. Technically, the TF-IDF itself is already a vector space language model. The reason we seldom use TF-IDF directly is because the model contains too much noise and the dimensionality is too high to process efficiently even on a modern computer. To convert a TF-IDF to an LSA model, DLSA’s algebraic operations involve large matrix multiplications and time-consuming SVD. We initially tried to use MLib to implement DLSA. However, MLlib is unable to perform SVD on a data set of \(10^5\) features with limited RAM, we have to implement our own stochastic SVD on Apache Spark using rank-revealing technique. The DLSA will be discussed in detail in later chapter.
-PANNS builds the search index to enable fast \(k\)-NN search in high dimensional LSA vector spaces. Though dimensionality has been significantly reduced from TF-IDF (\(10^5\) features) to LSA (\(10^3\) features), \(k\)-NN search in a \(10^3\)-dimension space is still a great challenge especially when we try to provide responsive services. A naive linear search using one CPU takes over 6 seconds to finish in a database of 4 million entries, which is unacceptably long for any realistic services. PANNS implements a parallel RP-tree algorithm which makes a reasonable tradeoff between accuracy and efficiency. PANNS is the core component in the backend system and we will present its algorithm in detail in later chapter. PANNS is becoming a popular choice of Python-based approximate k-NN library for application developers. According to the PyPI’s statistics, PANNS has achieved over 27,000 downloads since it was first published in October 2014.
-KServer runs within a web server, processes the users requests and replies with a list of similar documents. KServer uses the index built by PANNS to perform fast search in the database. The ranking of the search results is based on the cosine similarity metric. A key performance metric for KServer is the service time. We wrapped KServer into a Docker image and deployed multiple KServer instances on different machines to achieve better performance. We also implemented a simple round-robin mechanism to balance the request loads among the multiple KServers.
-Kvasir architecture provides a great potential and flexibility for developers to build various interesting applications on different devices, e.g., semantic search engine, intelligent Twitter bots, context-aware content provision, etc. We provide the live demo videos of the seamless integration of Kvasir into web browsing at the official website. Kvasir is also available as browser extension on Chrome and Firefox.
-
-
-Build Topic Models
-As has been explained in the previous section, the crawler and cleaner performs data collection and processing to build vocabulary and TF-IDF model. We have already talked about this part in detail in the NLP chapter. DLSA and PANNS are the two core components responsible for building language models and indexing the high dimensional data sets in Kvasir. In this section, we first sketch out the key ideas in DLSA.
-First, a recap of LSA from the NLP chapter. The vector space model belongs to algebraic language models, where each document is represented with a row vector. Each element in the vector represents the weight of a term in the dictionary calculated in a specific way. E.g., it can be simply calculated as the frequency of a term in a document, or slightly more complicated TF-IDF. The length of the vector is determined by the size of the dictionary (i.e., number of features). A text corpus containing \(m\) documents and a dictionary of \(n\) terms will be converted to an \(A = m \times n\) row-based matrix. Informally, we say that \(A\) grows taller if the number of documents (i.e., \(m\)) increases, and grows fatter if we add more terms (i.e., \(n\)) in the dictionary.
-The core operation in LSA is to perform SVD. For that we need to calculate the covariance matrix \(C = A^T \times A\), which is a \(n \times n\) matrix and is usually much smaller than \(A\). This operation poses as ad bottleneck in computing: the \(m\) can be very large (a lot of documents) or the \(n\) can be very large (a lot of features for each document). For the first, we can easily parallelise the calculation of \(C\) by dividing \(A\) into \(k\) smaller chunks of size \([\frac{m}{k}] \times n\), so that the final result can be obtained by aggregating the partial results as \(C = \sum_{i=1}^{k} A^T_i \times A_i \label{eq:1}\).
-However, a more serious problem is posed by the second issue. The SVD function in MLlib is only able to handle tall and thin matrices up to some hundreds of features. For most of the language models, there are often hundreds of thousands features (e.g., \(10^5\) in our case). The covariance matrix \(C\) becomes too big to fit into the physical memory, hence the native SVD operation in MLlib of Spark fails as the first subfigure of Figure [@fig:case-recommender:revealing] shows.
-
- Rank-revealing reduces dimensionality to perform in-memory SVD
-
-
Rank-revealing reduces dimensionality to perform in-memory SVD
-
-In linear algebra, a matrix can be approximated by another matrix of lower rank while still retaining approximately properties of the matrix that are important for the problem at hand. In other words, we can use another thinner matrix \(B\) to approximate the original fat \(A\). The corresponding technique is referred to as rank-revealing QR estimation. We won’t talk about this method in detail, but the basic idea is that, the columns are sparse and quite likely linearly dependent. If we can find the rank \(r\) of a matrix \(A\) and find suitable \(r\) columns to replace the original matrix, we can then approximate it. A TF-IDF model having \(10^5\) features often contains a lot of redundant information. Therefore, we can effectively thin the matrix \(A\) then fit \(C\) into the memory. Figure [@fig:case-recommender:revealing] illustrates the algorithmic logic in DLSA, which is essentially a distributed stochastic SVD implementation.
-To sum up, we propose to reduce the size of TF-IDF model matrix to fit it into the memory, so that we can get a LSA model, where we know the document-topic and topic-word probability distribution.
-
-
-Index Text Corpus
-With a LSA model at hand, finding the most relevant document is equivalent to finding the nearest neighbours for a given point in the derived vector space, which is often referred to as k-NN problem. The distance is usually measured with the cosine similarity of two vectors. In the NLP chapter we have seen how to use linear search in the LSA model. However, neither naive linear search nor conventional k-d tree is capable of performing efficient search in such high dimensional space even though the dimensionality has been significantly reduced from \(10^5\) to \(10^3\) by LSA.
-The key observation is that, we need not locate the exact nearest neighbours in practice. In most cases, slight numerical error (reflected in the language context) is not noticeable at all, i.e., the returned documents still look relevant from the user’s perspective. By sacrificing some accuracy, we can obtain a significant gain in searching speed.
-
-Random Projection
-To optimise the search, the basic idea is that, instead of searching in all the existing vectors, we can pre-cluster the vectors according to their distances, each cluster with only a small number of vectors. For an incoming query, as long as we can put this vector into a suitable cluster, we can then search for close vectors only in that cluster.
-
- Projection on different random lines
-
-
Projection on different random lines
-
-[@fig:case-recommender:projection] gives a naive example on a 2-dimension vector space. First, a random vector \(x\) is drawn and all the points are projected onto \(x\). Then we divide the whole space into half at the mean value of all projections (i.e., the blue circle on \(x\)) to reduce the problem size. For each new subspace, we draw another random vector for projection, and this process continues recursively until the number of points in the space reaches the predefined threshold on cluster size.
-In the implementation, we can construct a binary tree to facilitate the search. Technically, this can be achieved by any tree-based algorithms. Given a tree built from a database, we answer a nearest neighbour query \(q\) in an efficient way, by moving \(q\) down the tree to its appropriate leaf cell, and then return the nearest neighbour in that cell. In Kvasir, we use the Randomised Partition tree (RP-tree) introduced in [@dasgupta2013randomized] to do it. The general idea of RP-tree algorithm used here is clustering the points by partitioning the space into smaller subspaces recursively.
-
- Construct a binary search tree from the random projection
-
-
Construct a binary search tree from the random projection
-
-The [@fig:case-recommender:search] illustrates how binary search can be built according to the dividing steps shown above. You can see the five nodes in the vector space are put into five clusters/leaves step by step. The information of the random vectors such as x, y, and z are also saved. Once we have this tree, given another query vector, we can put it into one of the clusters along the tree to find the cluster of vectors that are close to it.
-Of course, we have already said that this efficiency is traded-off with search accuracy. One type of common misclassification is that it is possible that we can separate close vectors into different clusters. As we can see in the first subfigure of [@fig:case-recommender:projection], though the projections of \(A\), \(B\), and \(C\) seem close to each other on \(x\), \(C\) is actually quite distant from \(A\) and \(B\). The reverse can also be true: two nearby points are unluckily divided into different subspaces, e.g., points \(B\) and \(D\) in the left panel of [@fig:case-recommender:projection].
-
- Aggregate clustering result from multipel RP-trees
-
-
Aggregate clustering result from multipel RP-trees
-
-It has been shown that such misclassifications become arbitrarily rare as the iterative procedure continues by drawing more random vectors and performing corresponding splits. In the implementation, we follow this path and build multiple RP-trees. We expect that the randomness in tree construction will introduce extra variability in the neighbours that are returned by several RP-trees for a given query point. This can be taken as an advantage in order to mitigate the second kind of misclassification while searching for the nearest neighbours of a query point in the combined search set. As shown in [@fig:case-recommender:union], given an input query vector x, we find its neighbour in three different RP-trees, and the final set of neighbour candidates comes from the union of these three different sets.
-
-
-Optimising Vector Storage
-You may have noticed that, in this method, we need to store all the random vectors that are generated in the non-leaf nodes of the tree. That means storing a large number of random vectors at every node of the tree, each with a large number features. It introduces significant storage overhead. For a corpus of 4 million documents, if we use \(10^5\) random vectors (i.e., a cluster size of \(\frac{4\times~10^6}{2\times~10^5} = 20\) on average), and each vector is a \(10^3\)-dimension real vector (32-bit float number), the induced storage overhead is about 381.5~MB for each RP-tree. Therefore, such a solution leads to a huge index of \(47.7\)~GB given \(128\) RP-trees are included, or \(95.4\)~GB given \(256\) RP-trees.
-The huge index size not only consumes a significant amount of storage resources, but also prevents the system from scaling up after more and more documents are collected. One possible solution to reduce the index size is reusing the random vectors. Namely, we can generate a pool of random vectors once, and then randomly choose one from the pool each time when one is needed. However, the immediate challenge emerges when we try to parallelise the tree building on multiple nodes, because we need to broadcast the pool of vectors onto every node, which causes significant network traffic.
-
- Use a random seed to generate on the fly
-
-
Use a random seed to generate on the fly
-
-To address this challenge, we propose to use a pseudo random seed in building and storing search index. Instead of maintaining a pool of random vectors, we just need a random seed for each RP-tree. As shown in [@fig:case-recommender:randomseed], in a leaf cluster, instead of storing all the vectors, only the indices of vectors in the original data set are stored. The computation node can build all the random vectors on the fly from the given seed according to the random seed.
-From the model building perspective, we can easily broadcast several random seeds with negligible traffic overhead instead of a large matrix in the network. In this way we improve the computation efficiency. From the storage perspective, we only need to store one 4-byte random seed for each RP-tree. In such a way, we are able to successfully reduce the storage overhead from \(47.7\)~GB to \(512\)~B for a search index consisting of \(128\) RP-trees (with cluster size 20), or from \(95.4\)~GB to only \(1\)~KB if \(256\) RP-trees are used.
-
-
-Optimise Data Structure
-Let’s consider a bit more about using multiple RP-trees. Regarding the design of PANNS, we have two design options in order to improve the searching accuracy. Namely, given the size of the aggregated cluster which is taken as the union of all the target clusters from every tree, we can either use fewer trees with larger leaf clusters, or use more trees with smaller leaf clusters. Increasing cluster size is intuitive: if we increase it to so large that includes all the vectors, then it is totally accurate.
-On the other hand, we expect that when using more trees the probability of a query point to fall very close to a splitting hyperplane should be reduced, thus it should be less likely for its nearest neighbours to lie in a different cluster. By reducing such misclassifications, the searching accuracy is supposed to be improved. Based on our knowledge, although there are no previous theoretical results that may justify such a hypothesis in the field of nearest neighbour search algorithms, this concept could be considered as a combination strategy similar to those appeared in ensemble clustering, a very well established field of research. Similar to our case, ensemble clustering algorithms improve clustering solutions by fusing information from several data partitions.
-To experimentally investigate this hypothesis we employ a subset of the Wikipedia database for further analysis. In what follows, the data set contains \(500,000\) points and we always search for the \(50\) nearest neighbours of a query point. Then we measure the searching accuracy by calculating the amount of actual nearest neighbours found.
-
- The number of true nearest neighbours found for different number of trees
-
-
The number of true nearest neighbours found for different number of trees
-
-We query \(1,000\) points in each experiment. The results presented in [@fig:case-recommender:exp01] correspond to the mean values of the aggregated nearest neighbours of the \(1,000\) query points discovered by PANNS out of \(100\) experiment runs. Note that \(x\)-axis represents the “size of search space” which is defined by the number of unique points within the union of all the leaf clusters that the query point falls in. Therefore, given the same search space size, using more tress indicates that the leaf clusters become smaller. As we can see in [@fig:case-recommender:exp01], for a given \(x\) value, the curves move upwards as we use more and more trees, indicating that the accuracy improves. As shown in the case of 50 trees, almost \(80\%\) of the actual nearest neighbours are found by performing a search over the \(10\%\) of the data set.
-Our empirical results clearly show the benefits of using more trees instead of using larger clusters for improving search accuracy. Moreover, regarding the searching performance, since searching can be easily parallelised, using more trees will not impact the searching time.
-
-
-Optimise Index Algorithm
-
- Illustration of parallelising the computation.
-
-
Illustration of parallelising the computation.
-
-In classic RP trees we have introduced above, a different random vector is used at each inner node of a tree. In this approach, the computations in the child-branches cannot proceed without finishing the computation in the parent node, as show in the left figure of [@fig:case-recommender:parallel]. Here the blue dotted lines are critical boundaries. Instead, we propose to use the same random vector for all the sibling nodes of a tree. This choice does not affect the accuracy at all because a query point is routed down each of the trees only once; hence, the query point is projected onto a random vector \(r_i\) sampled from the same distribution at each level of a tree. This means that we don’t need all the inner non-leaf node to be independent random vectors. Instead, the query point is projected onto only \(l\) i.i.d. random vectors \(r_1, \ldots, r_l\). An RP-tree has \(2^l-1\) inner nodes. Therefore, if each node of a tree had a different random vector as in classic RP-trees, \(2^l-1\) different random vectors would be required for one tree. However, when a single vector is used on each level, only \(l\) vectors are required. This reduces the amount of memory required by the random vectors from exponential to linear with respect to the depth of the trees.
-Besides, another extra benefit of using one random vector for one layer is that it speeds up the index construction significantly, since we can vectorise the computation. Let’s first look at the projection of vector \(a\) on \(b\). The projected length on \(b\) can be expressed as:
-\[\|a\|\cos~\theta = a.\frac{b}{\|b\|}.\] {#eq:case-recommender:project}
-Here \(\|a\|\) means the length of vector \(\mathbf{a}\). If we requires that all the random vectors \(\mathbf{b}\) has to be normalised, [@eq:case-recommender:project] becomes \(a.b\), the vector dot. Now we can perform the projection at this layer by computing: \(Xb_l\). Here \(X\) is the dataset, and each row is a document and each column is a feature; \(b_l\) is a random vector that we use for this layer. In this way, we don’t have to wait for the left tree to finish to start cutting the right tree.
-Now here is the tricky bit: we don’t even have to wait for the upper layer to start cutting the lower layer! The reason is that, at each layer, we do random projection of all the nodes in the dataset on one single random vector \(b\). We don’t really care the random clustering result from the previous layer. Therefore, we can perform \(Xb_1\), \(Xb_2\), …, \(Xb_l\) at the same time. That means, the projected data set \(P\) can be computed directly from the dataset \(X\) and a random matrix \(B\) as \(P = XB\) with only one pass of matrix multiplication. Here each column of \(B\) is just the random vector we use at a layer.
-In this approach there is not boundary, and all the projections can be done in just one matrix multiplication. While some of the observed speed-up is explained by a decreased amount of the random vectors that have to be generated, mostly it is due to enabling efficient computation of all the projections. Although the total amount of computation stays the same, in practice this speeds up the index construction significantly due to the cache effects and low-level parallelisation through vectorisation. The matrix multiplication is a basic linear algebra operation and many low level numerical libraries, such as OpenBLAS and MKL, provide extremely high-performance implementation of it.
-
-
-
-Search Articles
-By using RP-tree we have already limit the search range from the whole text corpus to only a cluster of small number of documents (vectors), where we can do a linear searching. We have also introduced several optimisations on the RP-tree itself, including using multiple trees, using random seed to remove the storage of random vectors, improving computation efficiency etc. But we don’t stop here: can we further improve the linear searching itself? It turns out, we can.
-To select the best candidates from a cluster of points, we need to use the coordinates in the original space to calculate their relative distance to the query point. This however, first increases the storage overhead since we need to keep the original high dimensional data set which is usually huge; second increases the query overhead since we need to access such data set. The performance becomes more severely degraded if the original data set is too big to load into the physical memory. Moreover, computing the distance between two points in the high dimensional space per se is very time-consuming.
-Nonetheless, we will show that it is possible to completely get rid of the original data set while keeping the accuracy at a satisfying level. The core idea of is simple. Let’s look at the second subfigure in [@fig:case-recommender:projection]. Imagine that we add a new point to search for similar vectors. The normal approach is that we compute the distance between this node and A, B, C etc. But if you look at it close, all the existing nodes are already projected on the vector y, and we can also project the incoming query vector on y, and check to which of these points it is close to. Instead of computing the distances of two vectors, now we only compute the absolute value of subtraction of two numbers (since we can always project a vector onto another one and get a real number as result) as the distance. By replacing the original space with the projected one, we are able to achieve a significant reduction in storage and non-trivial gains in searching performance.
-Of course, it is not always an accurate estimation. In the first subfigure of [@fig:case-recommender:projection], a node can be physically close to A or B, but its projection could be closest to that of C. That again requires us to consider using multiple RP-trees. But instead of the actual vector content, in the leaf node of the trees we store only (index, projected value). Now for the input query vector, we run it in the \(N\) RP-trees and get \(N\) set of (index, value) pairs. Here each value is the absolute value of the difference of projected values between the vector in the tree and the query vector itself. Each vector of course is label by a unique index.
-For each index, we propose to use this metric: \(\frac{\sum~d_i}{\sum~c_i}\) to measure how close it is to the query vector. Here \(d_i\) is the distance between node \(i\) and query node on projected space, and \(c_i\) is the count of total number of node \(i\) in all the candidate sets from all the RP-trees. Smaller measurement means closer distance. The intuition is that, if distance value of a node on the projected space is small, then it is possibly close to the query node; or, if a node appears many times from the candidate sets of different RP-trees, it is also quite likely a possible close neighbour.
-As a further improvement, we update this metric to \(\frac{\sum~d_i}{(\sum~c_i)^3}\). By so doing, we give much more weight on the points which have multiple occurrences from different RP-trees by assuming that such points are more likely to be the true k-NN. Experiment results confirm that by using this metric it is feasible to use only the projected space in the actual system implementation. Please refer to the original paper if you are interested with more detail.
-
-
-Code Implementation
-What we have introduced is the main theory behind the Kvasir, a smart content discovery tool to help you manage this rising information flood. In this chapter, we will show some naive code implementation in OCaml and Owl to help you better understand what we have introduced so far.
-First, we show the simple random projection along a RP-tree.
-
-
let make_projection_matrix seed m n =
- Owl_stats_prng.init seed;
- Mat.gaussian m n |> Mat.to_arrays
-
-let make_projected_matrix m n =
- Array.init m (fun _ -> Array.make n 0.)
-
These two functions make projection matrix and the matrix to save projected results, both return as row vectors.
-
-
let project i j s projection projected =
- let r = ref 0. in
- Array.iter (fun (w, a) ->
- r := !r +. a *. projection.(w).(j);
- ) s;
- projected.(j).(i) <- !r
-
Based on these two matrices, the project function processes document i on the level j in the tree. The document vector is s. The projection is basically a dot multiplication between s and matrix projection.
-
-
let random seed cluster tfidf =
- let num_doc = Nlp.Tfidf.length tfidf in
- let vocab_len = Nlp.Tfidf.vocab_len tfidf in
- let level = Maths.log2 (float_of_int num_doc /. cluster) |> ceil |> int_of_float in
-
- let projection = make_projection_matrix seed vocab_len level in
- let projected = make_projected_matrix level num_doc in
-
- Nlp.Tfidf.iteri (fun i s ->
- for j = 0 to level - 1 do
- project i j s projection projected;
- done;
- ) tfidf;
-
- vocab_len, level, projected
-
The random function performs a random projection of sparse data set, based a built TF-IDF model. Technically, a better way is to use LSA model as the vectorised representation of documents as we have introduced above, since a LSA model acquired based on TF-IDF represents more abstract idea of topics and has less features. However, here it suffices to use the TF-IDF model to show the random projection process. This function projects all the document vectors in the model to the projected matrix, level by level. Recall that the result only contains the projected value instead of the whole vector.
-As we have explained in the “Search Articles” section, this process can be accelerated to use matrix multiplication. The code below shows this implementation for the random projection function. It also returns the shape of projection and the projected result.
-
-
let make_projection_matrix seed m n =
- Owl_stats_prng.init seed;
- Mat.gaussian m n
-
-let random seed cluster data =
- let m = Mat.row_num data in
- let n = Mat.col_num data in
- let level = Maths.log2 (float_of_int m /. cluster) |> ceil |> int_of_float in
-
- let projection = make_projection_matrix seed n level in
- let projected = Mat.dot data projection |> Mat.transpose in
-
- n, level, projected, projection
-
After getting the projection result, we need to build a RP-tree accordingly. The following is about how to build the index in the form of a binary search tree. The tree is defined as:
-
-
type t =
- | Node of float * t * t (* intermediate nodes: split, left, right *)
- | Leaf of int array (* leaves only contains doc_id *)
-
An intermediate node includes three parts: split, left, right, and the leaves only contain document index.
-
-
let split_space_median space =
- let space_size = Array.length space in
- let size_of_l = space_size / 2 in
- let size_of_r = space_size - size_of_l in
- (* sort into increasing order for median value *)
- Array.sort (fun x y -> Pervasives.compare (snd x) (snd y)) space;
- let median =
- match size_of_l < size_of_r with
- | true -> snd space.(size_of_l)
- | false -> (snd space.(size_of_l-1) +. snd space.(size_of_l)) /. 2.
- in
- let l_subspace = Array.sub space 0 size_of_l in
- let r_subspace = Array.sub space size_of_l size_of_r in
- median, l_subspace, r_subspace
-
The split_space_median function divides the projected space into subspaces to assign left and right subtrees. The passed in space is the projected values on a specific level. The criterion of division is the median value. The Array.sort function sorts the space into increasing order for median value.
-
-
let filter_projected_space level projected subspace =
- let plevel = projected.(level) in
- Array.map (fun (doc_id, _) -> doc_id, plevel.(doc_id)) subspace
-
Based on the document id of the points in the subspace, filter_projected_space function filters the projected space. The purpose of this function is to update the projected value using a specified level so the recursion can continue. Both the space and the returned result are of the same format: (doc_id, projected value).
-
-
let rec make_subtree level projected subspace =
- let num_levels = Array.length projected in
- match level = num_levels with
- | true -> (
- let leaf = Array.map fst subspace in
- Leaf leaf
- )
- | false -> (
- let median, l_space, r_space = split_space_median subspace in
- let l_space = match level < num_levels - 1 with
- | true -> filter_projected_space (level+1) projected l_space
- | false -> l_space
- in
- let r_space = match level < num_levels - 1 with
- | true -> filter_projected_space (level+1) projected r_space
- | false -> r_space
- in
- let l_subtree = make_subtree (level+1) projected l_space in
- let r_subtree = make_subtree (level+1) projected r_space in
- Node (median, l_subtree, r_subtree)
- )
-
Based on these functions, the make_subtree recursively grows the binary subtree to make a whole tree. The projected is the projected points we get from the first step. It is of shape (level, document_number). The subspace is a vector of shape (1, document_number).
-
-
let grow projected =
- let subspace = Array.mapi (fun doc_id x -> (doc_id, x)) projected.(0) in
- let tree_root = make_subtree 0 projected subspace in
- tree_root
-
The grow function calls make_subtree to build the binary search tree. It initialises the first subspace at level 0, and then start recursively making the subtrees from level 0. Currently everything is done in memory for efficiency consideration.
-
-
let rec traverse node level x =
- match node with
- | Leaf n -> n
- | Node (s, l, r) -> (
- match x.(level) < s with
- | true -> traverse l (level+1) x
- | false -> traverse r (level+1) x
- )
-
Now that the tree is built, we can perform search on it. The recursive traverse function traverses the whole tree to locate the cluster for a projected vector x starting from a given level.
-
-
let rec iter_leaves f node =
- match node with
- | Leaf n -> f n
- | Node (s, l, r) -> iter_leaves f l; iter_leaves f r
-
-let search_leaves node id =
- let leaf = ref [||] in
- (
- try iter_leaves (fun l ->
- if Array.mem id l = true then (
- leaf := l;
- failwith "found";
- )
- ) node
- with exn -> ()
- );
- Array.copy !leaf
-
Finally, search_leaves returns the leaves/clusters which have the given id inside it. It mainly depends on the iter_iterate function which iterates all the leaves in a tree and applies function, to perform this search.
-All these code above is executed on one tree. When we collect the k-NN candidates from all the trees, instead of calculating the vector similarity, we utilise the frequency/count of the vectors in the union of all the candidate sets from all the RP-trees.
-
-
let count_votes nn =
- let h = Hashtbl.create 128 in
- Owl_utils.aarr_iter (fun x ->
- match Hashtbl.mem h x with
- | true -> (
- let c = Hashtbl.find h x in
- Hashtbl.replace h x (c + 1)
- )
- | false -> Hashtbl.add h x 1
- ) nn;
- let r = Array.make (Hashtbl.length h) (0,0) in
- let l = ref 0 in
- Hashtbl.iter (fun doc_id votes ->
- r.(!l) <- (doc_id, votes);
- l := !l + 1;
- ) h;
- Array.sort (fun x y -> Pervasives.compare (snd y) (snd x)) r;
- r
-
The count_votes function takes in an array of array nn as input. Each inner array contains the indexes of candidate nodes from one RP-tree. These nodes are collected into a hash table, using index as key and the count as value. Then the results are sorted according to the count number.
-
-
-Make It Live
-We provide a live demo of Kvasir. Here we briefly introduce the implementation of the demo with OCaml. This demo mainly relies on Lwt. The Lwt library implements cooperative threads. It is often used as web server in OCaml.
-This demo takes in document in the form of web query API and returns similar documents in the text corpus already included in our backend. First, we need to do some simple preprocessing using regular expression. This of course needs some fine tuning in the final product, but needs to be simple and fast.
-
-
let simple_preprocess_query_string s =
- let regex = Str.regexp "[=+%0-9]+" in
- Str.global_replace regex " " s
-
The next function extract_query_params parse the web query, and retrieves parameters.
-
-
let extract_query_params s =
- let regex = Str.regexp "num=\\([0-9]+\\)" in
- let _ = Str.search_forward regex s 0 in
- let num = Str.matched_group 1 s |> int_of_string in
-
- let regex = Str.regexp "mode=\\([a-z]+\\)" in
- let _ = Str.search_forward regex s 0 in
- let mode = Str.matched_group 1 s in
-
- let regex = Str.regexp "doc=\\(.+\\)" in
- let _ = Str.search_forward regex s 0 in
- let doc = Str.matched_group 1 s in
-
- (num, mode, doc)
-
Finally, start_service function includes the core query service that keeps running. It preprocesses the input document and processed with similar document searching according to different search mode. We won’t cover the details of web server implementation details using Lwt. Please refer to its documentation for more details.
-
-
let start_service lda idx =
- let num_query = ref 0 in
- let callback _conn req body =
- body |> Cohttp_lwt_body.to_string >|= (fun body ->
- let query_len = String.length body in
- match query_len > 1 with
- | true -> (
- try (
- let num, mode, doc = extract_query_params body in
- Log.info "process query #%i ... %i words" !num_query query_len;
- num_query := !num_query + 1;
-
- let doc = simple_preprocess_query_string doc in
- match mode with
- | "linear" -> query_linear_search ~k:num lda doc
- | "kvasir" -> query_kvasir_idx ~k:num idx lda doc
- | _ -> failwith "kvasir:unknown search mode"
- )
- with exn -> "something bad happened :("
- )
- | false -> (
- Log.warn "ignore an empty query";
- ""
- )
- )
- >>= (fun body -> Server.respond_string ~status:`OK ~body ())
- in
- Server.create ~mode:(`TCP (`Port 8000)) (Server.make ~callback ())
-
Summary
-In this chapter, we presented Kvasir which provides seamless integration of LSA-based content provision into web browsing. To build Kvasir as a scalable Internet service, we addressed various technical challenges in the system implementation. Specifically, we proposed a parallel RP-tree algorithm and implemented stochastic SVD on Spark to tackle the scalability challenges in index building and searching. We have introduced the basic algorithm and how it can optimised step by step, from storage to computation. These optimisations include aggregating results from multiple trees, replacing random variable with a single random seed, removing the projection computation boundary between different layers, using count to approximate vector distance, etc. Thanks to its novel design, Kvasir can easily achieve millisecond query speed for a 14 million document repository. Kvasir is an open-source project and is currently under active development. The key components of Kvasir are implemented as an Apache Spark library, and all the source code are publicly accessible on GitHub.
-
-
-
-
\ No newline at end of file
diff --git a/docs/cgraph.html b/docs/cgraph.html
deleted file mode 100644
index f4a2f0b..0000000
--- a/docs/cgraph.html
+++ /dev/null
@@ -1,369 +0,0 @@
-Computation Graph - Owl Online Tutorials
-Computation Graph
-This chapter first gives a bird’s-eye-view on the computation graph in Owl. Then we will continue to cover the design and implementation details of the computation graph and how it is fitted into Owl’s functor stack, and its implications on the architecture of numerical systems.
-
-Introduction
-
-What is a Computation Graph?
-As a functional programmer, it is basic knowledge that a function takes an input then produces an output. The input of a function can be the output of another function which then creates dependency. If we view a function as one node in a graph, and its input and output as incoming and outgoing links respectively, as the computation continues, these functions are chained together to form a directed acyclic graph (DAG). Such a DAG is often referred to as a computation graph.
-
- Computation graph of a simple function: sin(x*y)
-
-
Computation graph of a simple function: sin(x*y)
-
-The [@fig:cgraph:plot_01] shows an example graph for calculating function sin (x * y). The generated computation graph contains several pieces of information which are essential for debugging the applications. These information include node index, operation type, reference counter, and shapes of data. In the figure above, we can see the row vector y of shape [1; 4] is broadcast on the matrix x of shape [8; 4] in Mul operation.
-
-
-From Dynamic to Static
-The computation graph can be either implicitly constructed or explicitly declared in the code. Often, implicit construction is done by operator overloading while explicit declaration uses domain specific languages (DSL). The two methods lead to two different kinds of computation graphs – dynamic graph and static graph, each has its own pros and cons.
-A dynamic graph is constructed during the runtime. Due to operator overloading, its construction can be naturally blended with a language’s native constructs such as if ... else ... and for loops. This renders greatest flexibility and expressiveness. On the other hand, a static graph needs to be declared using a specific DSL (which has a steeper learning curve). Because the structure of a graph is already known during the compilation phase, there is a great space for optimisation. However, it is sometimes very difficult to use static graphs to express conditions and loops when using with native code together.
-As we can see, the flexibility of a dynamic graph comes at the price of lower performance. Facebook’s PyTorch and Google’s TensorFlow are the typical examples of dynamic and static graph respectively. Many programmers need to make a choice between these two different types. A common practice is “using PyTorch at home and using TensorFlow in the company”, In other words, PyTorch is preferred for prototyping and TensorFlow is ideal for production use. (The TensorFlow 2.0 uses eager execution by default, which is easier for users to get start with.)
-Owl does something slightly different from these two in order to get the best parts of both worlds. Owl achieves this by converting a dynamic graph into static one in the runtime. The motivation is based on a very important observation: in many cases, a computation graph is continuously re-evaluated after its construction. This is especially true for those iterative optimisation algorithms. We only update some inputs of the graph in each iteration.
-If we know that the graph structure remains the same in every iteration, rather than re-constructing it all the time, we can convert it into a static graph before the iterative evaluation. This is exactly what Owl does. By so doing, the programmer can enjoy the flexibility offered by the dynamic graph construction with operator overloading, but still achieve the best performance from static graph.
-Comparing to TensorFlow, the time overhead (for graph conversion and optimisation) is shifted to the runtime in Owl. You may worry about the performance: “Is it going to slow down my fancy DNN application?” The fact is, even for large and complex graphs, this Just-in-Time compilation (JIT) and optimisation are often quite fast. In this lazy_lstm.ml example, there are 15,105 nodes and 21,335 edges. Owl is able to compile the graph within 230ms then optimise it within 210ms. The optimised graph contains only 8,224 nodes, 14,444 edges and runs much faster. Remember that you only need to do it once before training. For smaller networks, it often just takes several milliseconds.
-Technically, JIT is very straightforward to implement in Owl’s architecture. Given a deep neural network, Owl first runs both forward pass and backward pass. Because of the computation graph, the calculation becomes symbolic and we can obtain the complete computation graph to calculate the loss and gradients of a neural network. We can then pass this static graph to the optimisation engine to optimise. The Neural Compiler functor is parameterised by a computation engine then compiles a DNN definition and training configuration into a device-dependent static graph.
-
-
-Significance in Computing
-Now that you know the basic ideas of computation graph, you may ask why it matters? Well, the computation graph makes many things a lot easier. Here is an incomplete list of potential benefits:
-
-- simulate lazy evaluation in a language with eager evaluation;
-- incremental computation (a.k.a Self-Adjusted Computation);
-- reduce computation complexity by optimising the structure of a graph;
-- reduce memory management overhead by pre-allocating the space;
-- reduce memory footprint by reusing allocated memory space;
-- natural support for parallel and distributed computing;
-- natural support for heterogeneous computing;
-- natural support for symbolic maths.
-
-Some of the benefits are very obvious. Memory usage can certainly be optimised if the graph structure is fixed and the input shapes are known. One optimisation is reusing previously allocated memory, which is especially useful for those applications involving large ndarray calculations. In fact, this optimisation can also be performed by a compiler by tracking the reference number of allocated memory, a technique referred to as linear types.
-Some may appear less obvious at the first glance. For example, we can decompose a computation graph into multiple independent subgraphs and each can be evaluated in parallel on different cores or even computers. Maintaining the graph structure also improves fault-tolerance, by providing natural support for rollback mechanisms.
-The computation graph provides a way to abstract the flow of computations, therefore it is able to bridge the high-level applications and low-level machinery of various hardware devices. This is why we say it has natural support for heterogeneous computing.
-The computation graph has more profound implications. Because the memory allocated for each node is mutable, Algodiff becomes more scalable when evaluating large and complex graphs. At the same time, mutable transformation is handled by Owl so programmers can still write safe functional code.
-
-
-
-Examples
-Before diving into the details of the design of the computation graph module, let’s first shows some examples of using the CGraph modules and how the computation can be transformed into lazy evaluation.
-
-Example 01: Basic CGraph
-Let’s start with a simple operation that adds up one ndarray and one scalar. Normally with Ndarray module what we do is:
-
-
module N = Dense.Ndarray.D
-let x = N.ones [|2;2|]
-let y = 2.
-let g = N.add_scalar x y
-
Now, let’s make it into a lazy evaluation calculation with CGraph:
-
-
module N = Owl_computation_cpu_engine.Make (Owl_algodiff_primal_ops.D)
-
The computation graph is designed as a functor stack. A CGraph module can be built based on a ndarray module, since in the end a lazy evaluation still requires specific computation at some point.
-
-
let x = N.var_arr ~shape:[|2;2|] "x"
-let y = N.var_elt "y"
-let g = N.add_scalar x y
-
Next we define two variables, the first x is a ndarray, and y is a scalar. At this stage, we only define these two as placeholders with no real data. Then we use the add_scalar function to get another lazy evaluated array g.
-To get the value of the lazy expression g, we need to first assign real values to x and y:
-
-
let x_val = Dense.Ndarray.D.ones [|2;2|]
-let y_val = 2.
-let _ = N.assign_arr x x_val
-let _ = N.assign_elt y y_val
-
The real values are the familiar dense ndarray and float number. Note the two different assignment method for ndarray and scalar. Finally, we can evaluate the ndarray g:
-
-
N.eval_arr [|g|];;
->- : unit = ()
-N.unpack_arr g;;
->- : Algodiff.D.A.arr =
-> C0 C1
->R0 3 3
->R1 3 3
-
-
The eval_arr returns nothing. To get the value, we need to use the unpack_arr or unpack_elt function.
-
-
-Example 02: CGraph with AD
-In real applications, we normally need to deal with CGraphs that are constructed in the Algorithmic Differentiation process. Here is an example of using the dense ndarray module to compute the gradients of a function:
-
-
include Owl_algodiff_generic.Make (Owl_algodiff_primal_ops.D)
-
-let f x y = Maths.((x * sin (x + x) + ((pack_flt 1.) * sqrt x) / (pack_flt 7.)) * (relu y) |> sum')
-
-let x = Dense.Ndarray.D.ones [|2;2|] |> pack_arr
-let y = pack_elt 2.
-let z = (grad (f x)) y |> unpack_elt
-
Obviously, it is extremely difficult for the users to manually construct the computation graph that computes the gradient of the function f. Instead, we use the computation graph as the base module to build the Algorithmic Differentiation module:
-
-
module G = Owl_computation_cpu_engine.Make (Owl_algodiff_primal_ops.D)
-include Owl_algodiff_generic.Make (G)
-
-let f x y = Maths.((x * sin (x + x) + ((pack_flt 1.) * sqrt x) / (pack_flt 7.)) * (relu y) |> sum')
-
-let x = G.var_arr ~shape:[|2;2|] "x" |> pack_arr
-let y = G.var_elt "y" |> pack_elt
-let z = (grad (f x)) y
-
Note how the CGraph module are treated as equal to the Ndarray module in building the AD module. They decide if the AD module uses normal or lazy evaluation. Now we can evaluate z with the approach as before. Or we can use another approach: building a graph based on the input and output.
-
-
let inputs = [| unpack_arr x |> G.arr_to_node; unpack_elt y |> G.elt_to_node |]
-let outputs = [| unpack_elt z |> G.elt_to_node |]
-let g = G.make_graph inputs outputs "graph"
-
To build a graph, we need to specify the input and output nodes. Here it might be a bit confusing, since there are two layers of packing and unpacking. Currently the x, y, and z are both AD values of type AD.t, therefore we need AD.unpack_arr and AD.unpack_elt to make them CGraph lazy array and scalar values. And then, to build the explicit computation graph, we need to use the G.arr_to_node and G.elt_to_node functions to make them into graph nodes first. Finally an explicit computation graph can be built with make_graph function.
-You might be wondering why bother to build the graph if we can directly evaluate the value z. The reason is that evaluation is not always the target. For example, we often need to visualise the generated computation graph. Backward mode generates and maintains a computation graph in order to back propagate the error. The computation graph is very helpful in both debugging and understanding the characteristic of your numerical functions.
-Owl provides the graph_to_dot function to facilitate you in generating computation graphs. It converts the computation graph into a dot format string. The dot file can be visualised with professional tools such as graphviz.
-
-
let s = G.graph_to_dot g
-let _ = Owl_io.write_file "cgraph.dot" s
-
The generated computation graph looks like below. The Owl source code contains more examples about visualising a computation graph.
-
- Computation graph of a simple math function
-
-
Computation graph of a simple math function
-
-Come back to the evaluation of graph. After constructing the graph g, we can then assign real data values to the computation graph. The only difference is that, now we need to first unpack the AD value to CGraph value before assignment:
-
-
let x_val = Dense.Ndarray.D.ones [|2;2|]
-let y_val = 2.
-let _ = G.assign_arr (unpack_arr x) x_val
-let _ = G.assign_elt (unpack_elt y) y_val
-
Finally, we can evaluate the whole graph with
-
-Since the whole graph is evaluated, then surely the output ndarray z is also evaluated. We can first unpack it from AD value into normal CGraph ndarray and then get its value by:
-
-
# unpack_elt z |> G.unpack_elt
-
-- : float = 4.20861827873129801
-
Example 03: CGraph with DNN
-Since the optimisation and neural network modules are built on Algorithmic Differentiation module, they can also benefit from the power of CGraph. Suppose we have a network built of CGraph based neural network nn, we can then use the forward and backward function to get the forward inference and backward propagation computation graph from the neural network graph module, with CGraph array variable.
-Actually, for ease of access, Owl has provided another functor to build the neural network module based on the CGraph module:
-
-
module CPU_Engine = Owl_computation_cpu_engine.Make (Owl_algodiff_primal_ops.S)
-module CGCompiler = Owl_neural_compiler.Make (CPU_Engine)
-
-open CGCompiler.Neural
-open CGCompiler.Neural.Graph
-open CGCompiler.Neural.Algodiff
-
-let make_network input_shape =
- input input_shape
- |> lambda (fun x -> Maths.(x / pack_flt 256.))
- |> conv2d [|5;5;1;32|] [|1;1|] ~act_typ:Activation.Relu
- |> max_pool2d [|2;2|] [|2;2|]
- |> dropout 0.1
- |> fully_connected 1024 ~act_typ:Activation.Relu
- |> linear 10 ~act_typ:Activation.(Softmax 1)
- |> get_network ~name:"mnist"
-
The CGraph-built neural network module does not require any change of code in building the CNN except for the headers. We can then use the training function in CGCompiler module.
-
-
let pack x = CGCompiler.Engine.pack_arr x |> Algodiff.pack_arr
-
-let train network =
- let x, _, y = Dataset.load_mnist_train_data_arr () in
- let x = pack x in
- let y = pack y in
- CGCompiler.train network x y
-
And similarly the inference can be done with CGCompiler.model function. You can see that to make the existing DNN programme into lazy evaluation version, all you need to do is to update the header and use packing/unpacking properly for the data.
-You might be asking: the lazy evaluation version of neural network looks cool and all, but why do I need it? That brings to the large performance improvement the CGraph module can bring about to computation. To motivate you to continue to understand more about the design and optimisation of the CGraph module, you can try to run both mnist_cnn.ml and lazy_mnist.ml then compare their performance. Both Zoo scripts train the same convolution neural network to recognise the handwritten digits using MNIST datasets in 60 iterations. On a normal laptop, mnist_cnn.ml takes 30s to finish and consumes approximate 4GB memory, whilst lazy_mnist.ml only takes 5s and consumes about 0.75GB. lazy_mnist.ml achieves the state-of-the-art performance which you can obtain by using TensorFlow (with its recent XLA optimisation), actually Owl runs even faster on 3 out of 4 machines we have tested.
-If these numbers make you interested in knowing how the magic happens, let’s unveil the underlying mechanism of Owl’s computation graph in the following sections.
-
-
-
-Design Rationale
-How the computation graph is designed? In the older versions, Algodiff module has some partial support of computation graph in order to perform reverse mode algorithmic differentiation (AD). The full support was only introduced in Owl 0.4.0.
-Owl implements the computation graph in a very unique and interesting way. Let’s first see several principles which we followed:
-
-- Non-intrusive, the original functor stack should work as it was;
-- Transparent to the programmers as much as possible;
-- Support both eager and lazy evaluation;
-- Flexible enough for future extension on other devices.
-
-The computation graph is implemented in a very self-contained stack. I have devised a good way to “inject” it into Owl’s original functor stack. If it sounds too abstract, please have a look at the final product in the following figure.
-
- Computation graph functor stack in Owl
-
-
Computation graph functor stack in Owl
-
-The left figure shows part of Owl’s original functor stack, and the right one shows how the current one looks like after injection. We know the functor stack plays a central role in Owl’s architecture. In the old design, Ndarray implements a set of fundamental n-dimensional array operations, then Algodiff defines abstract mathematical operations for differentiation, finally Optimise engine glues low-level maths with high-level deep neural network applications. The whole stack is parameterised by the number type abstraction in Ndarray.
-
-Ndarray: provides number type abstraction and implements the fundamental numerical operations.Algodiff: implements algorithmic differentiation.Optimise: uses the derivative information to build an optimisation engine.Neural_Neuron: implements various kinds of neuron functions which can be optimised.Neural_Graph: connects neurons together to form a network so that we can train a useful model.
-The functor stack of computation graph is injected between Ndarray and Algodiff. The design principle is that the functor stack of a numerical system should be parameterised by both number type and device type. Number type provides data representation (real or complex, single or double, row-based or column-based layout, etc.) which decides how a maths construct should be built and operated. Device type provides hardware representation (CPU, GPU, FPGA, etc.) which decides how the computation should be performed on a specific device.
-The list below summarises the functionality of each functor. The order and naming of these functors can give you a rough understanding about how it is designed.
-
-Device: device abstraction contains device-dependent types and functions.Type: type definition of various (mathematical) operations.Shape: provides the shape inference function in the graph.Symbol: provides various functions to manipulate symbols.Operator: implements maths operators (+, -, *, /, etc.) which decide how the symbols should be connected to form a graph.Optimiser: optimises the structure of a given graph by searching and optimising various patterns.Graph: manipulates computation graphs at high level, e.g. visualisation, connecting inputs and outputs.Engine: evaluates a computation graph on a specific device.
-Why the magic can happen? Simply put, the injected computation graph stack provides an abstraction layer similar to symbolic maths. The original eager evaluation becomes symbolic operation (or graph construction) therefore they can be lazily evaluated.
-The shape inference functionality is able to infer the data shape of every node in a graph from its input. This allows Owl to calculate how much memory is required to evaluate the graph and pre-allocate this space. Owl can further track the reference number of each function node and reuse the allocated memory as much as possible, which reduces both memory footprint and Garbage Collector (GC) overhead, significantly improves the computation speed.
-The Optimiser functor searches for various structural patterns in a graph, removes unnecessary computations and fusing computation nodes if possible. All the patterns are defined in owl_computation_optimiser.ml, and it is very straightforward to plug in more patterns to extend Optimiser’s capability. Here are some example patterns.
-Constant folding is a very basic pattern to reduce graph size. We can pre-calculate some subgraphs. For example, the inputs which node #241 depends on are all constants, so the value of #241 is already decided. We can fold all the constants to node #241 before evaluating the whole graph.
-
- Optimisation techniques in computation graph: constant folding
-
-
Optimisation techniques in computation graph: constant folding
-
-Fusing operations can effectively reduce the round trips to the memory, which saves a lot of time when operating large ndarrys. In the figure below, nodes #421, #463, and #464 are fused into one fma node (i.e. fused-multiply-add operation), which also improves numerical accuracy. Owl also recognises quite complicated patterns, e.g. pattern formed by nodes #511 – #515 appears a lot in DNN training that uses Adagrad (Adaptive Subgradient Methods), the Optimiser is able to fuse all these operations into one-pass calculation.
-
- Optimisation techniques in computation graph: fusing operations
-
-
Optimisation techniques in computation graph: fusing operations
-
-In the next example, the Adding zero pattern is firstly detected hence #164 and #166 are removed and others are folded. Moreover, nodes #255 for repeat operation is also removed because add operation already supports broadcasting operation. Removing #255 can save some runtime memory in the evaluation.
-
- Optimisation techniques in computation graph: remove zero
-
-
Optimisation techniques in computation graph: remove zero
-
-To understand how effective the Optimiser works, we present both the original computation graph and the optimised graph taken from lazy_mnist.ml. Comparing to the original network which has 201 nodes, 239 edges, the optimised one contains only 103 nodes, 140 edges.
-Engine functor sits on top of the stack. This is where a computation graph finally gets executed. Engine functor contains two sub modules, one for initialising the graph and the other for evaluating graph.
-Before we finish this section, we can try the following snippet in utop. Both snippets generate a module for DNN applications, the difference is that the first one uses the old stack whereas the second one uses the new stack with computation graph.
-
-
- module M =
- Owl_neural_generic.Flatten (
- Owl_neural_graph.Make (
- Owl_neural_neuron.Make (
- Owl_optimise_generic.Make (
- Owl_algodiff_generic.Make (
- Dense.Ndarray.S)))));;
-
-
For the new stack, we can see it is indeed much deeper.
-
-
- module M =
- Owl_neural_generic.Flatten (
- Owl_neural_graph.Make (
- Owl_neural_neuron.Make (
- Owl_optimise_generic.Make (
- Owl_algodiff_generic.Make (
- Owl_computation_engine.Flatten (
- Owl_computation_cpu_engine.Make_Nested (
- Owl_computation_graph.Make (
- Owl_computation_optimiser.Make (
- Owl_computation_operator.Make (
- Owl_computation_symbol.Make (
- Owl_computation_shape.Make (
- Owl_computation_type.Make (
- Owl_computation_cpu_device.Make (
- Dense.Ndarray.S))))))))))))));;
-
-
Optimisation of CGraph
-The design of Owl is often driven by real-world applications. Besides the MNIST example, we find the image segmentation another challenging application for Owl. Seeking to push the performance of this application, we manage to further optimise the design of CGraph module. This work is done by Pierre Vandenhove, and you can visit his report for more details. It starts with the MRCNN-based Object Detection application we introduce in the Case - Object Detection chapter. Please refer to this chapter for detail explanation of this application.
-The first issue after constructing the network in Owl was that the memory usage, in inference mode, was huge. The network has over 400 layers and to avoid reinitialising the network for every picture, it is good to keep its input size fixed and to resize instead all the images to that size — a larger size takes more time and memory but yields more accurate results. A reasonable input size for this network is a 1024-pixel-wide square. Unfortunately, obtaining detections for one picture with this size required over 11 GB of RAM, which was too much for a laptop. As a comparison, the TensorFlow implementation only uses 1 GB. There was a big room for improvement!
-This is where CGraph comes to rescue. A computation graph is always directed and acyclic. Representing the structure of a program as a computation graph has several advantages, especially for computationally-intensive code dealing with big multi-dimensional arrays. A really useful one is that prior to evaluating the nodes, you can optimise the structure of the graph: for instance, useless calculations such as adding an array with nothing but zeros can be removed, common patterns can be merged into one node and executed more efficiently, etc. This helps a bit: thanks to these optimisations, the number of nodes of Mask R-CNN drops from 4095 to 3765. Another really important feature in this case is the ability to pre-allocate a memory space to each node, to decrease the overall memory consumption and reduce the garbage collector overhead.
-
-Optimising memory with pebbles
-To describe the problem of allocating memory in a computation graph, it is interesting to look at the pebble game, which was introduced in 1973 to explain register allocation.
-The pebble game is played on a directed acyclic graph. Each node can store at most one pebble. The game begins with no pebble on any node. At each step, the player can do one of the following moves:
-
-- if a vertex \(v\) has no predecessor, the player can place a pebble on
v.
-- if all predecessors of a vertex \(v\) are pebbled, the player can place a pebble on
v or slide a pebble from one of its predecessors to v.
-- the player can remove any pebble from a vertex (and reuse that pebble later).
-
-The goal of the game is to place a pebble at least once on some fixed output vertices of the graph.
-Here is an example of an optimal pebbling strategy using the previous computation graph (gray nodes are pebbled), using moves 1 -> 2 -> 3 -> 1 -> 2 -> 2. We assume that the goal is to pebble node 5:
-
- Modelling computation graph memory optimisation problem as a pebble game
-
-
Modelling computation graph memory optimisation problem as a pebble game
-
-This relates to the memory allocation of the computation graph if we see pebbles as memory blocks used to store the output value of a node. We assume that the values of the inputs are known (move 1). We can only compute the value of a vertex if all its predecessors are simultaneously stored in memory (move 2). The sliding move means that the memory of a node can be overwritten by its successor during its computation (inplace reuse). We can always reuse a memory block from any other node (move 3). Given a graph, the idea is thus to find a strategy to pebble it using a minimum number of pebbles (in other words, using as little memory as possible).
-We also want to avoid pebbling any node twice (in order the keep the execution time as low as possible, because that would mean that we compute the same node twice). Given these constraints, finding a strategy using the least amount of pebbles is unfortunately NP-complete. Since computation graphs can have a few thousand nodes, we will be looking for a fast heuristic instead of an exact algorithm.
-
-
-Allocation Algorithm
-The initially implemented strategy to allocate memory to a node \(u\) in Owl’s computation graph module was simply to reuse the memory of a direct predecessor with same output shape as \(u\) when that is possible. This optimisation decreases the memory consumption of Mask R-CNN from 11 GB to 7 GB — much better, but still quite far from the 1 GB of the TensorFlow implementation!
-We can actually make it much better by sharing memory between nodes
-
-- that are not necessarily a parent/child pair;
-- that do not have the same output size (by allocating a large block of memory once, without necessarily using all of it all the time).
-
-To do this efficiently, we first have to fix an evaluation order (in practice, any topological order). Given this order, we can pinpoint the moment when the memory of a node becomes useless by keeping a counter of how many times it has been used. When it has been used by all its children, we can recycle its memory. Then to allocate memory to a node, we simply check which blocks are available and we select the one with the closest size (in order not to waste too much memory). If no block is available, we allocate a new one. This can be executed in \(\mathcal{O}(n * \log(n))\) time, which is negligible compared to the actual cost of evaluating the graph.
-Then we just have to be careful that some operations cannot overwrite their inputs while they are being computed (the sliding move from the pebble game is forbidden) and that some nodes cannot be overwritten for practical purposes (typically constant nodes or neural network weights). Implementing this effectively reduced the memory consumption of Mask R-CNN from 7 GB to 1 GB for a 1024x1024 picture, making it as efficient as the TensorFlow implementation! A summary of the changes can be found in this pull request. Here are some more statistics illustrating what the computation graph with this new algorithm achieves:
-
-Evaluation of the effect of CGraph memory optimisation using different DNN architectures {#tbl:cgraph:perf}
-
-
-
-
-
-
-
-
-
-| Architecture |
-Time without CG (s) |
-Time with CG (building + evaluating) (s) |
-Memory without CG (MB) |
-Memory with CG (MB) |
-
-
-| InceptionV3 |
-0.565 |
-0.107 + 0.228 = 0.335 |
-625.76 |
-230.10 |
-
-
-| ResNet50 |
-0.793 |
-0.140 + 0.609 = 0.749 |
-1309.9 |
-397.07 |
-
-
-| MNIST (training) |
-20.422 |
-0.144 + 10.920 = 11.064 |
-3685.3 |
-895.32 |
-
-
-| Mask R-CNN |
-11.538 |
-0.363 + 8.379 = 8.742 |
-6483.4 |
-870.48 |
-
-
-
-InceptionV3 and ResNet50 networks are tested with a 299x299 image; Mask R-CNN is tested with a 768x768 image. The MNIST line refers to a small neural network trained to recognize hand-written digits whose implementation can be found in this code repository. The time is the average over 30 evaluations, without reusing pre-computed nodes when a computation graph is used. The graph building phase includes graph construction, optimisation and memory initialisation. The memory is the maximum resident set size of the program. This was evaluated on a laptop with an Intel i5-6300HQ and 8 GB of RAM.
-For instance, when evaluated in the right order, the following computation graph, which can be used to recognise hand-written digits, needs only two different blocks of memory (each colour corresponds to a memory block, white nodes always need to be kept in memory). Part of the generated computation graph is shown in [@fig:cgraph:lazy].
-
- Optimised memory allocation
-
-
Optimised memory allocation
-
-You can find bigger visualisations of the allocation performed by the new algorithm in this link. You can also check this page for a demo of this Owl-powered network. If you want to apply it on videos, large images or experiment a bit more, see the GitHub repository. Pre-trained weights on 80 classes of common objects are provided, which have been converted from the TensorFlow implementation mentioned above.
-
-
-
-
-Summary
-In this chapter, we have introduced the core Computation Graph module in Owl. We start with the general introduction of the computation graph in numerical computing and why we build that in Owl. Then we use several examples to demonstrate how the computation graph module is used in Owl. This is followed by the internal design of this module, most importantly the CGraph stack and its position in the Owl architecture. The computation graph creates a large optimisation space, and this chapter we present one of them in detail, which is to use the pebble game to optimise the memory allocation in Owl computation.
-The computation graph is a hot research topic, and there is still much we can do to improve Owl’s performance based on this module. For example, the Neural Compiler still takes extra time to convert and optimise a graph. Both tasks can actually be moved into compilation phase using MetaOCaml, which will squeeze out some extra performance gain for us.
-
-
- Next: Chapter 22Scripting and Zoo System
\ No newline at end of file
diff --git a/docs/constant.html b/docs/constant.html
deleted file mode 100644
index c889571..0000000
--- a/docs/constant.html
+++ /dev/null
@@ -1,707 +0,0 @@
-Constants and Metric System - Owl Online Tutorials
-Constants and Metric System
-In many scientific computing problems, numbers are not abstract but reflect the realistic meanings. In other words, these numbers only make sense on top of a well-defined metric system.
-
-What Is a Metric System
-For example, when we talk about the distance between two objects, I write down a number 30, but what does 30 mean in reality? Is it meters, kilometers, miles, or lightyears? Another example, what is the speed of light? Well, this is really depends on what metrics you are using, e.g., km/s, m/s, mile/h … Things can get really messy in computation if we do not unify the metric system in a numerical library. The translation between different metrics is often important in real-world application. I do not intend to dig deep into the metric system here, so please read online articles to find out more, e.g., Wiki: Outline of the metric system.
-
-
-Four Metric Systems
-There are four metrics adopted in Owl, and all of them are wrapped in the Owl.Const module.
-
-All the metrics defined in these four systems can be found in the interface file owl_const.mli.
-In general, SI is much newer and recommended to use. International System of Units (French: Système international d’unités, SI), historically also called the MKSA system of units for metre–kilogram–second–ampere. The SI system of units extends the MKS system and has 7 base units, by expressing any measurement of physical quantities using fundamental units of Length, Mass, Time, Electric Current, Thermodynamic Temperature, Amount of substance and Luminous Intensity, which are Metre, Kilogram, Second, Ampere, Kelvin, Mole and Candela respectively. Here is a nice one-page poster from NPL to summarise what have talked about SI.
-
- Units of measurement in the SI metric system
-
-
-
-
Units of measurement in the SI metric system
-
-
-
-SI Prefix
-As a computer scientist, you must be familiar with prefixes such as kilo, mega, giga. SI system includes the definition of these prefixes as well. But be careful (especially for computer science guys), the base is 10 instead of 2. These prefixes are defined in the Const.Prefix module.
-
-
Const.Prefix.peta;;
- Const.Prefix.tera;;
- Const.Prefix.giga;;
- Const.Prefix.mega;;
- Const.Prefix.kilo;;
- Const.Prefix.hecto;;
-
Example: Physics and Math constants
-Now we can safely talk about the distance between two objects, light of speed, and a lot of other real-world stuff with atop of a well-defined metric system in Owl. See the following examples.
-
-
- Const.SI.light_year;; (* light year in SI system *)
- Const.MKS.light_year;; (* light year in MKS system *)
- Const.CGS.light_year;; (* light year in CGS system *)
- Const.CGSM.light_year;; (* light year in CGSM system *)
-
-
How about Planck’s constant?
-
-
- Const.SI.plancks_constant_h;; (* in SI system *)
- Const.MKS.plancks_constant_h;; (* in MKS system *)
- Const.CGS.plancks_constant_h;; (* in CGS system *)
- Const.CGSM.plancks_constant_h;; (* in CGSM system *)
-
-
The table below shows some physical constants that the SI module includes:
-
-Physical constants {#tbl:constant:physic}
-
-
-
-
-
-speed_of_light |
-speed of light in vacuum |
-
-
-gravitational_constant |
-Newtonian constant of gravitation |
-
-
-plancks_constant_h |
-Planck constant |
-
-
-plancks_constant_hbar |
-reduced Planck constant |
-
-
-astronomical_unit |
-one astronomical unit in meters |
-
-
-light_year |
-one light year in meters |
-
-
-parsec |
-one light year in meters |
-
-
-grav_accel |
-standard acceleration of gravity |
-
-
-electron_volt |
-electron volt |
-
-
-mass_electron |
-electron mass |
-
-
-mass_muon |
-muon mass |
-
-
-mass_proton |
-proton mass |
-
-
-mass_neutron |
-neutron mass |
-
-
-rydberg |
-Rydberg constant |
-
-
-boltzmann |
-Boltzmann constant |
-
-
-molar_gas |
-molar gas constant |
-
-
-standard_gas_volume |
-molar volume of ideal gas (273.15 K, 100 kPa) |
-
-
-bohr_radius |
-Bohr radius |
-
-
-stefan_boltzmann_constant |
-Stefan-Boltzmann constant |
-
-
-thomson_cross_section |
-Thomson cross section in square metre |
-
-
-bohr_magneton |
-Bohr magneton in Joules per Tesla |
-
-
-nuclear_magneton |
-Nuclear magneton in Joules per Tesla |
-
-
-electron_magnetic_moment |
-electron magnetic moment in Joules per Tesla |
-
-
-proton_magnetic_moment |
-proton magnetic moment in Joules per Tesla |
-
-
-faraday |
-Faraday constant |
-
-
-electron_charge |
-electron volt in Joules |
-
-
-vacuum_permittivity |
-vacuum electric permittivity |
-
-
-vacuum_permeability |
-vacuum magnetic permeability |
-
-
-debye |
-one debye in coulomb metre |
-
-
-gauss |
-one gauss in maxwell per square metre |
-
-
-
-Some basic mathematical constants are also provided in Owl, though some constants in advanced mathematics are not yet included such as the golden ratio or Euler–Mascheroni constant.
-
-Math constants {#tbl:constant:math}
-
-
-
-
-
-pi |
-Pi |
-
-
-e |
-Natural constant |
-
-
-euler |
-Euler constant |
-
-
-
-Besides these constants, we also provide some frequently used computations based on them, including:
-
-log2e (\(\log_2 e\))log10e (\(\log_10 e\))loge2 (\(\log_e 2\))loge10 (\(\log_e 10\))logepi (\(\log_e \pi\))pi2 (\(2\pi\))pi4 (\(4\pi\))pi_2 (\(\pi / 2\))pi_4 (\(\pi / 4\))sqrt1_2 (\(\sqrt{\frac{1}{2}}\))sqrt2 (\(\sqrt{2}\))sqrt3 (\(\sqrt{3}\))sqrtpi (\(\sqrt{\pi}\))
-
-
-
-International System of Units
-Now that you know how to use constants, we will use the International System of Units (SI) module as an example to show the constants we include in Owl. These units are all derived from the seven basic units we have mentioned, and can be categorised according to different application fields.
-
-Time
-The base SI unit for time measurement is second.
-
-Time units {#tbl:constant:time}
-
-
-
-
-
-minute |
-one minute in seconds |
-
-
-hour |
-one hour in seconds |
-
-
-day |
-one day in seconds |
-
-
-week |
-one week in seconds |
-
-
-
-
-
-Length
-The base SI unit for length measurement is metre.
-
-Length units {#tbl:constant:length}
-
-
-
-
-
-inch |
-one inch in metres |
-
-
-foot |
-one foot in metres |
-
-
-yard |
-one yard in metres |
-
-
-mile |
-one mile in metres |
-
-
-mil |
-one mil in metres |
-
-
-fathom |
-one fathom in metres |
-
-
-point |
-one point in metres |
-
-
-micron |
-one micron in metres |
-
-
-angstrom |
-one angstrom in metres |
-
-
-nautical_mile |
-one nautical mile in metres |
-
-
-
-
-
-Area
-Measuring area and volume still relies on SI base unit metre.
-
-Area units {#tbl:constant:area}
-
-
-
-
-
-hectare |
-one hectare in square meters |
-
-
-acre |
-one acre in square meters |
-
-
-barn |
-one barn in square meters |
-
-
-
-
-
-Volume
-
-Volume units {#tbl:constant:volume}
-
-
-
-
-
-liter |
-one liter in cubic meters |
-
-
-us_gallon |
-one gallon (US) in cubic meters |
-
-
-uk_gallon |
-one gallon (UK) in cubic meters |
-
-
-canadian_gallon |
-one Canadian gallon in cubic meters |
-
-
-quart |
-one quart (US) in cubic meters |
-
-
-cup |
-one cup (US) in cubic meters |
-
-
-pint |
-one pint in cubic meters |
-
-
-fluid_ounce |
-one fluid ounce (US) in cubic meters |
-
-
-tablespoon |
-one tablespoon in cubic meters |
-
-
-
-
-
-Speed
-The base units for speed are that of time and length.
-
-Speed units {#tbl:constant:speed}
-
-
-
-
-
-miles_per_hour |
-miles per hour in metres per second |
-
-
-kilometers_per_hour |
-kilometres per hour in metres per second |
-
-
-knot |
-one knot in metres per second |
-
-
-
-
-
-Mass
-The base unit for presenting mass is kilogram (kg).
-
-Mass units {#tbl:constant:mass}
-
-
-
-
-
-pound_mass |
-one pound (avoirdupous) in kg |
-
-
-ounce_mass |
-one ounce in kg |
-
-
-metric_ton |
-1000 kg |
-
-
-ton |
-one short ton in kg |
-
-
-uk_ton |
-one long ton in kg |
-
-
-troy_ounce |
-one Troy ounce in kg |
-
-
-carat |
-one carat in kg |
-
-
-unified_atomic_mass |
-atomic mass constant |
-
-
-solar_mass |
-one solar mass in kg |
-
-
-
-
-
-Force
-Measuring force relies on the SI derived unit: newton, and one newton equals to 1 kilogram metre per squared second.
-
-Force units {#tbl:constant:force}
-
-
-
-
-
-newton |
-SI derived unit (\(kg \cdot m \cdot s^{-2}\)) |
-
-
-gram_force |
-one gram force in newtons |
-
-
-kilogram_force |
-one kilogram force in newtons |
-
-
-pound_force |
-one pound force in newtons |
-
-
-poundal |
-one poundal in newtons |
-
-
-dyne |
-one dyne in newtons |
-
-
-
-
-
-Energy
-The unit of measuring energy level is joule, which equals to one kilogram square metre per square second.
-
-Energy units {#tbl:constant:energy}
-
-
-
-
-
-joule |
-SI base unit |
-
-
-calorie |
-one calorie (thermochemical) in Joules |
-
-
-btu |
-one British thermal unit (International Steam Table) in Joules |
-
-
-therm |
-one therm (US) in Joules |
-
-
-erg |
-one erg in Joules |
-
-
-
-
-
-Power
-The unit of power is watts, a SI derived unit. One watts equals to one kilogram square metre per cubic second, or one Joule per second.
-
-Power units {#tbl:constant:power}
-
-
-
-
-
-horsepower |
-one horsepower in watts |
-
-
-
-
-
-Pressure
-To measure pressure we often use pascal as a standard unit. One pascal equals to a kilogram per metre per square second, or a newton per square metre.
-
-Pressure units {#tbl:constant:pressure}
-
-
-
-
-
-bar |
-one bar in pascals |
-
-
-std_atmosphere |
-standard atmosphere in pascals |
-
-
-torr |
-one torr (mmHg) in pascals |
-
-
-meter_of_mercury |
-one metre of mercury in pascals |
-
-
-inch_of_mercury |
-one inch of mercury in pascals |
-
-
-inch_of_water |
-one inch of water in pascals |
-
-
-psi |
-one psi in pascals |
-
-
-
-
-
-Viscosity
-The poise is a unit in dynamic viscosity and the stokes is for kinematic viscosity. They are actually included in the CGS-based system for electrostatic units.
-
-Viscosity units {#tbl:constant:viscosity}
-
-
-
-
-
-poise |
-base unit |
-
-
-stokes |
-base unit |
-
-
-
-
-
-Luminance
-Candela is the base unit for luminance, and both lumen and lux are derived units.
-
-Luminance units {#tbl:constant:illuminatti}
-
-
-
-
-
-stilb |
-Candela per square metre |
-
-
-lumen |
-luminous flux, Candela square radian, SI derived unit |
-
-
-phot |
-base unit |
-
-
-lux |
-one lux in phots, SI derived unit |
-
-
-footcandle |
-one footcandle in phots |
-
-
-lambert |
-base unit |
-
-
-footlambert |
-one footlambert in lambert |
-
-
-
-
-
-Radioactivity
-The SI unit of radioactivity is becquerel, named in honour of the scientist Henri Becquerel, defined as one transformation (or decay or disintegration) per second. The other base units such as ampere, second, and kilogram are also used.
-
-Radioactivity units {#tbl:constant:radioactivity}
-
-
-
-
-
-curie |
-one curie in becquerel |
-
-
-roentgen |
-one ampere second per kilogram |
-
-
-rad |
-erg per gram |
-
-
-
-
-
-
- Next: Chapter 27Internal Utility Modules
\ No newline at end of file
diff --git a/docs/convention.html b/docs/convention.html
deleted file mode 100644
index 52f47b1..0000000
--- a/docs/convention.html
+++ /dev/null
@@ -1,987 +0,0 @@
-Conventions - Owl Online Tutorials
-Conventions
-Every software system has its own rules and conventions which require the developers to comply with. Owl is not an exception, for example the rules on broadcasting operation and the conventions on slice definition. In this chapter, I will cover the function naming and various conventions in Owl.
-
-Pure vs. Impure
-Ndarray module contains many functions to manipulate and perform mathematical operations over multi-dimensional arrays. The pure functions (a.k.a immutable functions) refer to those which do not modify the passed in variables but always return a new one as result. In contrast, impure functions (a.k.a mutable functions) refer to those which modifies the passed-in variables in place.
-The arguments between pure and impure functions will never end. Functional programming in general promotes the use of immutable data structures. Using impure functions makes it difficult to reason the correctness of the code, therefore you need to think carefully when you decide to use them. On the other hand, generating a fresh 1000 x 1000 matrix every time simply because you modify one element does not seem very practical either.
-The introduction of impure functions into Owl is under many careful and practical considerations. One primary motivation of using in-place modification is to avoid expensive memory allocation and deallocation operations, this can significantly improve the runtime performance of a numerical application especially when large ndarrays and matrices involved.
-Can we have the best parts of both world, i.e. writing functional code and being memory efficient at the same time? As you learn more about Owl, you will realise that this can be achieved by lazily evaluating a mathematical expression using computation graph. The programmer focusses on the functional code, Owl’s computation graph module takes care of the “dangerous task” – allocating and managing the memory efficiently.
-Many pure functions in Ndarray module have their corresponding impure version, the difference is that impure version has an extra underscore “_” at the end of function names. For example, the following functions are the pure functions in Arr module.
-
-
- Arr.sin;;
- Arr.cos;;
- Arr.log;;
- Arr.abs;;
- Arr.add;;
- Arr.mul;;
-
-
Their corresponding impure functions are as follows.
-
-
- Arr.sin_;;
- Arr.cos_;;
- Arr.log_;;
- Arr.abs_;;
- Arr.add_;;
- Arr.mul_;;
-
-
For unary operators such as Arr.sin x, the situation is rather straightforward, x will be modified in place. However, for binary operates such as Arr.add_scalar_ x a and Arr.add_ x y, the situation needs some clarifications. For Arr.add_scalar x a, x will be modified in place and stores the final result, this is trivial because a is a scalar.
-For Arr.add_ x y, the question is where to store the final result when both inputs are ndarray. Let’s look at the type of Arr.add_ function.
-
-
val Arr.add_ : ?out:Arr.arr -> Arr.arr -> Arr.arr -> unit
-
As we can see from the function type, the output can be specified by an optional out parameter. If out is missing in the inputs, then Owl will try to use first operand (i.e. x) to store the final result. Because the binary operators in Owl support broadcasting operations by default, this further indicates when using impure functions every dimension of the first argument x must not be smaller than that of the second argument y. In other words, impure function only allows broadcasting smaller y onto x which is big enough to accommodate the result.
-Most binary math functions in Owl are associated with a shorthand operator, such as +, -, *, and /. The impure versions also have their own operators. For example, corresponding to Arr.(x + y) which returns the result in a new ndarray, you can write Arr.(x += y) which adds up x and y and saves the result into x.
-
-Alias of pure and impure binary math functions {#tbl:convention:pure}
-
-
-
-
-
-
-
-
-
-
-| add |
-+ |
-+= |
-
-
-| sub |
-- |
--= |
-
-
-| mul |
-* |
-*= |
-
-
-| div |
-/ |
-/= |
-
-
-| add_scalar |
-+$ |
-+$= |
-
-
-| sub_scalar |
--$ |
--$= |
-
-
-| mul_scalar |
-*$ |
-*$= |
-
-
-| div_scalar |
-/$ |
-/$= |
-
-
-
-
-
-Ndarray vs. Scalar
-There are three types of ndarray operations: map, scan, and reduce. Many functions can be categorised as reduction operations, such as Arr.sum, Arr.prod, Arr.min, Arr.mean, Arr.std, etc. All the reduction functions in Owl has a name parameter called axis. When you apply these reduction operations on a multi-dimensional array, there are two possible cases:
-
-- if axis is explicitly specified, then Owl reduces along the specified axis;
-- if axis is not specified, then Owl flattens the ndarray into a vector first and reduce all the elements along the axis 0.
-
-If the passed in ndarray is already one-dimensional, then two cases are equivalent. In the following code snippet, a has shape [|3;1;3|] whereas b has shape [|1|] since it only contains one element.
-
-
- let x = Arr.sequential [|3;3;3|];;
- let a = Arr.sum ~axis:1 x;;
- let b = Arr.sum x;;
-
-
If you want to add the result in b with another float number, you need to retrieve the value by calling get function.
-
-
- let c = Arr.get b [|0|] in
- c +. 10.;;
-
-
This does not look very convenient if we always need to extract a scalar value from the return of reduction operations. This is not a problem for the languages like Python and Julia since the return type is dynamically determined. However, for OCaml, this turns out to be challenging: we either use a unified type; or we implement another set of functions. In the end, we picked the latter in Owl’s design. Every reduction operation has two versions:
-
-- one allows you to reduce along the specified axis, or reduce all the elements, but always returns an ndarray;
-- one only reduces all the elements and always returns a scalar value.
-
-The difference between the two is that the functions returning a scalar ends up with an extra prime “'” character in their names. For example, for the first type of functions that return an ndarray, their function names look like these.
-
-
- Arr.sum;;
- Arr.min;;
- Arr.prod;;
- Arr.mean;;
- Arr.std;;
-
-
For the second type of functions that return a scalar, their name looks like these.
-
-
- Arr.sum';;
- Arr.min';;
- Arr.prod';;
- Arr.mean';;
- Arr.std';;
-
-
Technically, Arr.sum' is equivalent to the following code.
-
-
- let sum' x =
- let y = Arr.sum x in
- Arr.get y [|0|]
-
-
Let’s extend the previous code snippet, and test it in OCaml’s toplevel. Then you will understand the difference immediately.
-
-
- let x = Arr.sequential [|3;3;3|];;
- let a = Arr.sum ~axis:1 x;;
- let b = Arr.sum x;;
- let c = Arr.sum' x;;
-
-
Rules and conventions often reveals the tradeoffs in a design. By clarifying the restrictions, we hope the programmers can choose the right functions to use in a specific scenario.
-
-
-Infix Operators
-The operators in Owl are implemented in the functors defined in the Owl_operator module. These operators are categorised into Basic, Extend, Matrix, and Ndarray four module type signatures, because some operations are only meaningful for certain data structures. E.g., matrix multiplication *@ is only defined in Matrix signature.
-As long as a module implements all the functions defined in the module signature, you can use these functors to generate corresponding operators. In most cases, you do not need to work with these functors directly in Owl since I have done the generation part for you already.
-The operators have been included in each Ndarray and Matrix module. The following table summarises the operators currently implemented. In the table, both x and y represent either a matrix or an ndarray while a represents a scalar value.
-
-Infix operators in ndarray and matrix modules {#tbl:convention:infix}
-
-
-
-
-
-
-
-
-
-
-
-
-+ |
-x + y |
-element-wise add |
-both |
-both |
-
-
-- |
-x - y |
-element-wise sub |
-both |
-both |
-
-
-* |
-x * y |
-element-wise mul |
-both |
-both |
-
-
-/ |
-x / y |
-element-wise div |
-both |
-both |
-
-
-+$ |
-x +$ a |
-add scalar |
-both |
-both |
-
-
--$ |
-x -$ a |
-sub scalar |
-both |
-both |
-
-
-*$ |
-x *$ a |
-mul scalar |
-both |
-both |
-
-
-/$ |
-x /$ a |
-div scalar |
-both |
-both |
-
-
-$+ |
-a $+ x |
-scalar add |
-both |
-both |
-
-
-$- |
-a $- x |
-scalar sub |
-both |
-both |
-
-
-$* |
-a $* x |
-scalar mul |
-both |
-both |
-
-
-$/ |
-a $/ x |
-scalar div |
-both |
-both |
-
-
-= |
-x = y |
-comparison |
-both |
-both |
-
-
-!= |
-x != y |
-comparison |
-both |
-both |
-
-
-<> |
-x <> y |
-same as != |
-both |
-both |
-
-
-> |
-x > y |
-comparison |
-both |
-both |
-
-
-< |
-x < y |
-comparison |
-both |
-both |
-
-
->= |
-x >= y |
-comparison |
-both |
-both |
-
-
-<= |
-x <= y |
-comparison |
-both |
-both |
-
-
-=. |
-x =. y |
-element-wise cmp |
-Dense |
-both |
-
-
-!=. |
-x !=. y |
-element-wise cmp |
-Dense |
-both |
-
-
-<>. |
-x <>. y |
-same as !=. |
-Dense |
-both |
-
-
->. |
-x >. y |
-element-wise cmp |
-Dense |
-both |
-
-
-<. |
-x <. y |
-element-wise cmp |
-Dense |
-both |
-
-
->=. |
-x >=. y |
-element-wise cmp |
-Dense |
-both |
-
-
-<=. |
-x <=. y |
-element-wise cmp |
-Dense |
-both |
-
-
-=$ |
-x =$ y |
-comp to scalar |
-Dense |
-both |
-
-
-!=$ |
-x !=$ y |
-comp to scalar |
-Dense |
-both |
-
-
-<>$ |
-x <>$ y |
-same as != |
-Dense |
-both |
-
-
->$ |
-x >$ y |
-compare to scalar |
-Dense |
-both |
-
-
-<$ |
-x <$ y |
-compare to scalar |
-Dense |
-both |
-
-
->=$ |
-x >=$ y |
-compare to scalar |
-Dense |
-both |
-
-
-<=$ |
-x <=$ y |
-compare to scalar |
-Dense |
-both |
-
-
-=.$ |
-x =.$ y |
-element-wise cmp |
-Dense |
-both |
-
-
-!=.$ |
-x !=.$ y |
-element-wise cmp |
-Dense |
-both |
-
-
-<>.$ |
-x <>.$ y |
-same as !=.$ |
-Dense |
-both |
-
-
->.$ |
-x >.$ y |
-element-wise cmp |
-Dense |
-both |
-
-
-<.$ |
-x <.$ y |
-element-wise cmp |
-Dense |
-both |
-
-
->=.$ |
-x >=.$ y |
-element-wise cmp |
-Dense |
-both |
-
-
-<=.$ |
-x <=.$ y |
-element-wise cmp |
-Dense |
-both |
-
-
-=~ |
-x =~ y |
-approx = |
-Dense |
-both |
-
-
-=~$ |
-x =~$ y |
-approx =$ |
-Dense |
-both |
-
-
-=~. |
-x =~. y |
-approx =. |
-Dense |
-both |
-
-
-=~.$ |
-x =~.$ y |
-approx =.$ |
-Dense |
-both |
-
-
-% |
-x % y |
-mod divide |
-Dense |
-both |
-
-
-%$ |
-x %$ a |
-mod divide scalar |
-Dense |
-both |
-
-
-** |
-x ** y |
-power function |
-Dense |
-both |
-
-
-*@ |
-x *@ y |
-matrix multiply |
-both |
-Matrix |
-
-
-/@ |
-x /@ y |
-solve linear system |
-both |
-Matrix |
-
-
-**@ |
-x **@ a |
-matrix power |
-both |
-Matrix |
-
-
-min2 |
-min2 x y |
-element-wise min |
-both |
-both |
-
-
-max2 |
-max2 x y |
-element-wise max |
-both |
-both |
-
-
-@= |
-x @= y |
-concatenate vertically |
-Dense |
-both |
-
-
-@|| |
-x @|| y |
-concatenate horizontally |
-Dense |
-both |
-
-
-
-There is a list of things worth your attention as below.
-
-* is for element-wise multiplication; *@ is for matrix multiplication. You can easily understand the reason if you read the source code of Algodiff module. Using * for element-wise multiplication (for matrices) leads to the consistent implementation of algorithmic differentiation.
+$ has its corresponding operator $+ if we flip the order of parameters. However, be very careful about the operator precedence since OCaml determines the precedence based on the first character of an infix. +$ preserves the precedence whereas $+ does not. Therefore, I recommend using $+ with great care. Please always use parentheses to explicitly specify the precedence. The same also applies to $-, $*, and $/.
For comparison operators, e.g. both = and =. compare all the elements in two variables x and y. The difference is that = returns a boolean value whereas =. returns a matrix or ndarray of the same shape and same type as x and y. In the returned result, the value in a given position is 1 if the values of the corresponding position in x and y satisfy the predicate, otherwise it is 0.
For the comparison operators ended with $, they are used to compare a matrix/ndarray to a scalar value.
-Operators are easy to use, here are some examples.
-
-
let x = Mat.uniform 5 5;;
-let y = Mat.uniform 5 5;;
-
-Mat.(x + y);;
-Mat.(x * y);;
-Mat.(x ** y);;
-Mat.(x *@ y);;
-
-(* compare the returns of the following two *)
-
-Mat.(x > y);;
-Mat.(x >. y);;
-
Here is the return of the first example.
-
-
Mat.(x > y);;
->- : bool = false
-
-
Here is the return of the second example.
-
-
Mat.(x >. y);;
->- : (float, float64_elt) Owl_dense_matrix_generic.t =
->
-> C0 C1 C2 C3 C4
->R0 0 1 1 0 1
->R1 0 1 1 0 1
->R2 0 0 0 0 0
->R3 1 0 0 0 1
->R4 0 1 0 0 1
-
-
Now I am sure you can understand the difference between > and >., and the same applies to other binary comparison operators.
-Note that the extending indexing and slicing operators are not included in the table above, but you can find the detailed explanation in Indexing and Slicing Chapter.
-
-
-Operator Extension
-As you can see, the operators above do not allow interoperation on different number types (which may not be bad thing in my opinion actually). E.g., you cannot add a float32 matrix to float64 matrix unless you explicitly call the cast functions in Generic module.
-Some people just like Pythonic way of working, Owl.Ext module is specifically designed for this purpose, to make prototyping faster and easier. Once you open the module, Ext immediately provides a set of operators to allow you to interoperate on different number types, as below. It automatically casts types for you if necessary.
-
-Operator extensions {#tbl:convention:ext}
-
-
-
-
-
-
-
-
-
-
-+ |
-x + y |
-add |
-
-
-- |
-x - y |
-sub |
-
-
-* |
-x * y |
-mul |
-
-
-/ |
-x / y |
-div |
-
-
-= |
-x = y |
-comparison, return bool |
-
-
-!= |
-x != y |
-comparison, return bool |
-
-
-<> |
-x <> y |
-same as != |
-
-
-> |
-x > y |
-comparison, return bool |
-
-
-< |
-x < y |
-comparison, return bool |
-
-
->= |
-x >= y |
-comparison, return bool |
-
-
-<= |
-x <= y |
-comparison, return bool |
-
-
-=. |
-x =. y |
-element_wise comparison |
-
-
-!=. |
-x !=. y |
-element_wise comparison |
-
-
-<>. |
-x <>. y |
-same as !=. |
-
-
->. |
-x >. y |
-element_wise comparison |
-
-
-<. |
-x <. y |
-element_wise comparison |
-
-
->=. |
-x >=. y |
-element_wise comparison |
-
-
-<=. |
-x <=. y |
-element_wise comparison |
-
-
-% |
-x % y |
-element_wise mod divide |
-
-
-** |
-x ** y |
-power function |
-
-
-*@ |
-x *@ y |
-matrix multiply |
-
-
-min2 |
-min2 x y |
-element-wise min |
-
-
-max2 |
-max2 x y |
-element-wise max |
-
-
-
-You may have noticed, the operators ended with $ (e.g., +$, -$ …) disappeared from the table, which is simply because we can add/sub/mul/div a scalar with a matrix directly and we do not need these operators any more. Similar for comparison operators, because we can use the same > operator to compare a matrix to another matrix, or compare a matrix to a scalar, we do not need >$ any longer. Allowing interoperation makes the operator table much shorter.
-Currently, the operators in Ext only support interoperation on dense structures. Besides binary operators, Ext also implements most of the common math functions which can be applied to float numbers, complex numbers, matrices, and ndarray. These functions are:
-im; re; conj, abs, abs2, neg, reci, signum, sqr, sqrt, cbrt, exp, exp2, expm1, log, log10, log2, log1p, sin, cos, tan, asin, acos, atan, sinh, cosh, tanh, asinh, acosh, atanh, floor, ceil, round, trunc, erf, erfc, logistic, relu, softplus, softsign, softmax, sigmoid, log_sum_exp, l1norm, l2norm, l2norm_sqr, inv, trace, sum, prod, min, max, minmax, min_i, max_i, minmax_i.
-Note that Ext contains its own Ext.Dense module which further contains the following submodules.
-
-Ext.Dense.Ndarray.SExt.Dense.Ndarray.DExt.Dense.Ndarray.CExt.Dense.Ndarray.ZExt.Dense.Matrix.SExt.Dense.Matrix.DExt.Dense.Matrix.CExt.Dense.Matrix.Z
-These modules are simply the wrappers of the original modules in Owl.Dense module so they provide most of the APIs already implemented. The extra thing these wrapper modules does is to pack and unpack the raw number types for you automatically. However, you can certainly use the raw data types then use the constructors defined in Owl_ext_types to wrap them up by yourself. The constructors are defined as below.
-
-
- type ext_typ =
- F of float
- C of Complex.t
- DMS of dms
- DMD of dmd
- DMC of dmc
- DMZ of dmz
- DAS of das
- DAD of dad
- DAC of dac
- DAZ of daz
- SMS of sms
- SMD of smd
- SMC of sms
- SMZ of smd
- SAS of sas
- SAD of sad
- SAC of sac
- SAZ of saz
-
-
There are also corresponding packing and unpacking functions you can use, please read owl_ext_types.ml <https://github.com/owlbarn/owl/blob/master/src/owl/ext/owl_ext_types.ml>_ for more details.
-Let’s see some examples to understand how convenient it is to use Ext module.
-
-
open Owl.Ext;;
-
-let x = Dense.Matrix.S.uniform 5 5;;
-let y = Dense.Matrix.C.uniform 5 5;;
-let z = Dense.Matrix.D.uniform 5 5;;
-
-x + F 5.;;
-x * C Complex.({re = 2.; im = 3.});;
-x - y;;
-x / y;;
-x *@ y;;
-
-(** ... *)
-
-x > z;;
-x >. z;;
-(x >. z) * x;;
-(x >. F 0.5) * x;;
-(F 10. * x) + y *@ z;;
-
-(** ... *)
-
-round (F 10. * (x *@ z));;
-sin (F 5.) * cos (x + z);;
-tanh (x * F 10. - z);;
-
-(** ... *)
-
Before we finish this chapter, I want to point out the caveat. Ext tries to mimic the dynamic languages like Python by with unified types. This prevents OCaml compiler from doing type checking in compilation phase and introduces extra overhead in calling functions. Therefore, besides fast experimenting in toplevel, I do not recommend to use Ext module in the production code.
-
-
-Module Structures
-In Owl, Dense module contains the modules of dense data structures. For example, Dense.Matrix supports the operations of dense matrices. Similarly, Sparse module contains the modules of sparse data structures.
-
-
Dense.Ndarray;; (* dense ndarray *)
-Dense.Matrix;; (* dense matrix *)
-
-Sparse.Ndarray;; (* sparse ndarray *)
-Sparse.Matrix;; (* sparse ndarray *)
-
All these four modules consists of five submodules to handle different types of numbers.
-
-S module supports single precision float numbers float32;D module supports double precision float numbers float64;C module supports single precision complex numbers complex32;Z module supports double precision complex numbers complex64;Generic module supports all aforementioned number types via GADT.
-With Dense.Ndarray, you can create a dense n-dimensional array of no more than 16 dimensions. This constraint originates from the underlying Bigarray.Genarray module. In practice, this constraint makes sense since the space requirement will explode as the dimension increases. If you need anything higher than 16 dimensions, you need to use Sparse.Ndarray to create a sparse data structure.
-
-
-Number and Precision
-After deciding the suitable data structure (either dense or sparse), you can create a ndarray/matrix using creation function in the modules, using e.g., empty, create, zeros, ones … The type of numbers (real or complex) and its precision (single or double) needs to be passed to the creations functions as the parameters.
-
-
Dense.Ndarray.Generic.zeros Float64 [|5;5|];;
->- : (float, float64_elt) Dense.Ndarray.Generic.t =
->
-> C0 C1 C2 C3 C4
->R0 0 0 0 0 0
->R1 0 0 0 0 0
->R2 0 0 0 0 0
->R3 0 0 0 0 0
->R4 0 0 0 0 0
-
-
With zeros function, all the elements in the created data structure will be initialised to zeros.
-Technically, S, D, C, and Z are the wrappers of Generic module with explicit type information provided. Therefore you can save the type constructor which was passed into the Generic module if you use these submodules directly.
-
-
Dense.Ndarray.S.zeros [|5;5|];; (* single precision real ndarray *)
-Dense.Ndarray.D.zeros [|5;5|];; (* double precision real ndarray *)
-Dense.Ndarray.C.zeros [|5;5|];; (* single precision complex ndarray *)
-Dense.Ndarray.Z.zeros [|5;5|];; (* double precision complex ndarray *)
-
The following examples are for dense matrices.
-
-
Dense.Matrix.S.zeros 5 5;; (* single precision real matrix *)
-Dense.Matrix.D.zeros 5 5;; (* double precision real matrix *)
-Dense.Matrix.C.zeros 5 5;; (* single precision complex matrix *)
-Dense.Matrix.Z.zeros 5 5;; (* double precision complex matrix *)
-
The following examples are for sparse ndarrays.
-
-
Sparse.Ndarray.S.zeros [|5;5|];; (* single precision real ndarray *)
-Sparse.Ndarray.D.zeros [|5;5|];; (* double precision real ndarray *)
-Sparse.Ndarray.C.zeros [|5;5|];; (* single precision complex ndarray *)
-Sparse.Ndarray.Z.zeros [|5;5|];; (* double precision complex ndarray *)
-
The following examples are for sparse matrices.
-
-
Sparse.Matrix.S.zeros 5 5;; (* single precision real matrix *)
-Sparse.Matrix.D.zeros 5 5;; (* double precision real matrix *)
-Sparse.Matrix.C.zeros 5 5;; (* single precision complex matrix *)
-Sparse.Matrix.Z.zeros 5 5;; (* double precision complex matrix *)
-
In short, Generic module can do everything that submodules can, but for some functions (e.g. creation functions) you need to explicitly pass in the type information.
-
-
-Polymorphic Functions
-Polymorphism is achieved by pattern matching and GADT in Generic module. This means many functions in Generic module can handle aforementioned four different number types.
-In the following, I use the sum function in Dense.Matrix.Generic module as an example. sum function returns the summation of all the elements in a matrix.
-
-
open Owl;;
-
-let x = Dense.Matrix.S.eye 5 in
- Dense.Matrix.Generic.sum x;;
-
-let x = Dense.Matrix.D.eye 5 in
- Dense.Matrix.Generic.sum x;;
-
-let x = Dense.Matrix.C.eye 5 in
- Dense.Matrix.Generic.sum x;;
-
-let x = Dense.Matrix.Z.eye 5 in
- Dense.Matrix.Generic.sum x;;
-
As we can see, no matter what kind of numbers are held in an identity matrix, we always pass it to Dense.Matrix.Generic.sum function. Similarly, we can do the same thing for other modules (Dense.Ndarray, Sparse.Matrix, etc.) and other functions (add, mul, neg, etc.).
-Meanwhile, each submodule also contains the same set of functions, e.g, as below,
-
-
Dense.Matrix.S.(eye 5 |> sum);;
-
Module Shortcuts
-In reality, we often work with double precision numbers, therefore Owl provides some shortcuts to the data structures of double precision float numbers:
-
-Arr is equivalent to double precision real Dense.Ndarray.D;Mat is equivalent to double precision real Dense.Matrix.D;
-With these shortcut modules, you are no longer required to pass in type information. Here are some examples.
-
-
Arr.zeros [|5|];; (* same as Dense.Ndarray.D.zeros [|5|] *)
-Mat.zeros 5 5;; (* same as Dense.Matrix.D.zeros 5 5 *)
-
More examples besides creation functions are as follows.
-
-
Mat.load "data.mat";; (* same as Dense.Matrix.D.load "data.mat" *)
-Mat.of_array 5 5 x;; (* same as Dense.Matrix.D.of_array 5 5 x *)
-Mat.linspace 0. 9. 10;; (* same as Dense.Matrix.D.linspace 0. 9. 10 *)
-
If you actually work more often with other number types like Complex, you can certainly make your own alias to corresponding S, D, C, and Z module if you like.
-
-
-Type Casting
-As I mentioned before, there are four basic number types. You can therefore cast one value from one type to another one by using the cast_* functions in Generic module.
-
-Generic.cast_s2d: cast from float32 to float64;Generic.cast_d2s: cast from float64 to float32;Generic.cast_c2z: cast from complex32 to complex64;Generic.cast_z2c: cast from complex64 to complex32;Generic.cast_s2c: cast from float32 to complex32;Generic.cast_d2z: cast from float64 to complex64;Generic.cast_s2z: cast from float32 to complex64;Generic.cast_d2c: cast from float64 to complex32;
-In fact, all these function rely on the following cast function.
-
-
- val cast : ('a, 'b) kind -> ('c, 'd) t -> ('a, 'b) t
-
-
The first parameter specifies the cast type. If the source type and the cast type are the same, cast function simply makes a copy of the passed in value.
-
-
let x = Arr.uniform [|5;5|] (* created in float64 *);;
->val x : Arr.arr =
->
-> C0 C1 C2 C3 C4
->R0 0.648406 0.616945 0.828173 0.579604 0.212017
->R1 0.960002 0.0563993 0.219521 0.855164 0.414024
->R2 0.526179 0.532062 0.0640247 0.786426 0.956565
->R3 0.810557 0.476031 0.516506 0.11439 0.964041
->R4 0.981665 0.446936 0.276383 0.414747 0.174775
-
-
Now let’s cast x from float64 to complex32.
-
-
let y = Dense.Ndarray.Generic.cast Complex32 x (* cast to complex32 *);;
->val y : (Complex.t, complex32_elt) Dense.Ndarray.Generic.t =
->
-> C0 C1 C2 C3 C4
->R0 (0.648406, 0i) (0.616945, 0i) (0.828173, 0i) (0.579604, 0i) (0.212017, 0i)
->R1 (0.960002, 0i) (0.0563993, 0i) (0.219521, 0i) (0.855164, 0i) (0.414024, 0i)
->R2 (0.526179, 0i) (0.532062, 0i) (0.0640247, 0i) (0.786426, 0i) (0.956565, 0i)
->R3 (0.810557, 0i) (0.476031, 0i) (0.516506, 0i) (0.11439, 0i) (0.964041, 0i)
->R4 (0.981664, 0i) (0.446936, 0i) (0.276383, 0i) (0.414747, 0i) (0.174775, 0i)
-
-
To know more about the functions provided in each module, please read the corresponding interface file of Generic module. The Generic module contains the documentation.
-
-
-
- Next: Chapter 03Visualisation
\ No newline at end of file
diff --git a/docs/core-opt.html b/docs/core-opt.html
deleted file mode 100644
index eb35d30..0000000
--- a/docs/core-opt.html
+++ /dev/null
@@ -1,340 +0,0 @@
-Core Optimisation - Owl Online Tutorials
-Core Optimisation
-The study of the numerical methods is both new and old. There are always study that keeps extending numerical methods to more applications. On the other hand, we keep returning to the classical algorithms and libraries. For a high-level numerical library to achieve good performance, it is often necessay to interface its core code to classical C or Fortran code and libraries. That is true for NumPy, Julia, Matlab, and basically every other library of industrial level, and Owl is not an option. We interface part of the core operation to C code and highly optimised C libraries (such as the Lapacke from OpenBLAS). To better equip you with knowledge about how the low level is designed in Owl, in this chapter, we introduce how the core operations are implemented in C language for performance, and use some examples to show the techniques we use to optimise the C code.
-TODO: update evaluations
-TODO: logic is not very clear; paragraphs are fragmented.
-
-Background
-First, we briefly introduce some background information about numerical libraries and related optimisation.
-
-Numerical Libraries
-There are two widely used specifications of low level linear algebra routines. Basic Linear Algebra Subprograms (BLAS) consists of three levels of routines, from vector to matrix-vector and then to matrix-matrix operations. The other one, Linear Algebra Package (LAPACK), specifies routines for advanced numerical linear algebra, including solving systems of linear equations, linear least squares, eigenvalue problems, SVD, etc.
-The implementations of these specifications vary in different libraries, e.g. OpenBLAS~ and Math Kernel Library (MKL). OpenBLAS is a popular open source optimised BLAS library. MKL is a proprietary library, and provides highly optimised mathematical functions on Intel processors. It implements not only BLAS and LAPACK but also FFT and other computationally intensive mathematical functions. Another implementation is Eigen, a C++ template linear algebra library. The CPU implementation of many kernels in TensorFlow uses the Eigen Tensor class. The Automatically Tuned Linear Algebra Software (ATLAS) is another BLAS implementation, featuring automatically-tuned routines on specific hardware.
-These basic libraries focus on optimising the performance of operations in different hardware and software environment, but they don’t provide APIs that are easy to use for end users. That requires libraries such as NumPy, Julia, Matlab, and Owl. NumPy is the fundamental package for scientific computing with Python. It contains a powerful N-dimensional array abstraction. Julia is a high-level, high-performance dynamic programming language for numerical computing. Both are widely used and considered state of the art in numerical computing. Both NumPy and Julia rely on OpenBLAS or MKL for linear algebra backends. Matlab, the numerical computing library that has millions of uses worldwide, also belongs to this category.
-Deep learning libraries such as TensorFlow, PyTorch, and MxNet are popular. Keras is a user-friendly neural networks API that can run on top of TensorFlow. Instead of the wide range of numerical functionalities that NumPy etc. provide, these libraries focus on building machine learning applications for both research and production. Owl library provides its own neural network module.
-
-
-Optimisation of Numerical Computation
-To achieve optimal performance has always been the target of numerical libraries. However, the complexity of current computation platforms is growing fast, and the “free” performance boost that benefits from hardware upgrade also stagnates. These factors have made it difficult to achieve the optimal performance. Below list some of the techniques that we use to optimise operations in Owl.
-One method to utilise the parallelism of a computation platform is to use the Single Instruction Multiple Data (SIMD) instruction sets. They exploit data level parallelism by executing the same instruction on a set of data simultaneously, instead of repeating it multiple times on a single scalar value. One easy way to use SIMD is to rely on the automatic vectorisation capabilities of modern compilers, but in many cases developers have to manually vectorise their code with SIMD intrinsic functions. The Intel Advanced Vector Extensions (AVX) instruction set is offered on Intel and AMD processors, and the ARM processors provide the Advanced SIMD (NEON) extension.
-Another form of parallelism is to execute instructions on multiple cores. OpenMP is a C/C++/FORTRAN compiler extension that allows shared memory multiprocessing programming. It is widely supported on compilers such as GCC and Clang, on different hardware platforms. It is important for a numerical library to porting existing code to the OpenMP standard.
-To achieve optimal performance often requires choosing the most suitable system parameters on different machines or for different inputs. Aiming at providing fast matrix multiplication routines, the ATLAS library runs a set of micro-benchmarks to decide hardware specifications, and then search for the most suitable parameters such as block size in a wide tuning space.
-One general algorithm cannot always achieve optimal performance. One of the most important techniques the Julia uses is ``multiple dispatch’’, which means that the library provides different specific implementations according to the type of inputs.
-Besides these techniques, the practical experience from others always worth learning during development. These principles still hold true in the development of modern numerical libraries. An optimised routine can perform orders of magnitude faster than a naive implementation.
-
-
-
-Interfacing to C Code
-Despite the efficiency of OCaml, we rely on C implementation to deliver high performance for core functions. In the previous chapters in the Part I of this book, we have seen that how some of Owl modules, such as FFT and Linear Algebra, interface to existing C libraries. Optimising operations in these fields has been the classic topic of high performance computation for years, and thus there is no need to re-invent the wheels. We can directly interface to these libraries to provide good performance.
-
-Ndarray Operations
-Interfacing to high performance language is not uncommon practice among numerical libraries. If you look at the source code of NumPy, more than 50% is C code. In SciPy, the Fortran and C code takes up more than 40%. Even in Julia, about 26% of its code is in C or C++, most of them in the core source code.
-Besides interfacing to existing libraries, we focus on implementing the core operations in the Ndarray modules with C code. As we have seen in the N-Dimensional Arrays chapter, the n-dimensional array module lies in the heart of Owl, and many other libraries. NumPy library itself focuses solely on providing a powerful ndarray module to the Python world.
-A ndarray is a container of items of the same type. It consists of a contiguous block of memory, combined with an indexing scheme that maps N integers into the location of an item in the block. A stride indexing scheme can then be applied on this block of memory to access elements. Once converted properly to the C world, an ndarray can be effectively manipulated with normal C code.
-Here we list the categories of operations that are optimised with C in Owl. Many operations are first implemented in OCaml but then updated to C driven by our practical experience and applications.
-
-- mathematics operations, which are divided into map function, fold functions, and comparison functions.
-- convolution and pooling operations, since they took up most of the computation resources in DNN-related application
-- slicing, the basic operation for n-dimensional array
-- matrix operations, including transpose, swapping, and check functions such as
is_hermitian, is_symmetric etc.
-- sorting operation
-- other functions, including contraction, sliding, and repeat.
-
-
-
-From OCaml to C
-TODO: need more detail to show the layer-by-layer structure. A callgraph would be good.
-Let’s use examples to see exactly how we implement core operations wih C and interface them to OCaml.
-In Owl, ndarray is built on OCaml’s native Bigarray.Genarray. The Bigarray module implements multi-dimensional numerical arrays of integers and floating-point numbers, and Genarray is the type of Bigarrays with variable numbers of dimensions.
-Genarray is of type ('a, 'b, 't) t. It has three parameters: OCaml type for accessing array elements ('a), the actual type of array elements ('b), and indexing scheme ('t). The initial design of Owl supports both col-major and row-major indexing, but this choice leads to a lot of confusion, since the FORTRAN way of indexing starts from index 1, while the row-major starts from 0. Owl sticks with the row-major scheme now, and therefore in the core library the owl ndarray is define as:
-
-
open Bigarray
-type ('a, 'b) owl_arr = ('a, 'b, c_layout) Genarray.t
-
Now, let’s look at the 'a and 'b. In the GADT type ('a, 'b) kind, an OCaml type 'a is for values read or written in the Bigarray, such as int or float, and 'b represents the actual contents of the Bigarray, such as the float32_elt that contains 32-bit single precision floats. Owl supports four basic types of element: float, double, float complex, and double complex number. And we use the definition of type ('a, 'b) kind in the BigArray module.
-
-
open Bigarray
-
-type ('a, 'b) kind =
-| Float32 : (float, float32_elt) kind
-| Float64 : (float, float64_elt) kind
-| Complex32 : (Complex.t, complex32_elt) kind
-| Complex64 : (Complex.t, complex64_elt) kind
-
Suppose we want to implement the sine math function, which maps the sin function on every elements in the ndarray. We need to implement four different versions, each for one of these four number types. The basic code looks like this:
-
-
let _owl_sin : type a b. (a, b) kind -> int -> ('a, 'b) owl_arr -> ('a, 'b) owl_arr -> unit =
- fun k l x y ->
- match k with
- | Float32 -> owl_float32_sin l x y
- | Float64 -> owl_float64_sin l x y
- | Complex32 -> owl_complex32_sin l x y
- | Complex64 -> owl_complex64_sin l x y
- | _ -> failwith "_owl_sin: unsupported operation"
-
The _owl_sin implementation takes four input parameters. The first is the number type kind, the second is the total number of elements l to apply the sin function, the third one x is the source ndarray, and the final one y is the target ndarray. This function applies the sin function on the first l elements from x and then put the results in y. Therefore we can simply add a simple layer of wrapper around this function in the Dense module:
-
-
let sin x =
- let y = copy x in
- _owl_sin (kind x) (numel y) x y;
- y
-
But wait, what are the owl_float32_sin and owl_float64_sin etc. in _owl_sin function? How are they implemented? Let’s take a look:
-
-
external owl_float32_sin
- : int
- -> ('a, 'b) owl_arr
- -> ('a, 'b) owl_arr
- -> unit
- = "float32_sin"
-
OCaml provides mechanism for interfacing with C using the external keyword: external ocaml-function-name : type = c-function-name. This defines the value name ocaml-function-name as a function with type type that executes by calling the given C function c-function-name. Here we already have a C function that is called “float32_sin”, and owl_float32_sin calls that function.
-Now, finally, we venture into the world of C. We first need to include the necessary header files provided by OCaml:
-
-
#include <caml/mlvalues.h> // definition of the value type, and conversion macros
-#include <caml/alloc.h> //allocation functions to create structured ocaml objects
-#include <caml/memory.h> // miscellaneous memory-related functions and macros
-#include <caml/fail.h> //functions for raising exceptions
-#include <caml/callback.h> // callback from C to ocaml
-#include <caml/threads.h> //operations for interfacing in the presence of multiple threads
-
In the C file, the outlines of function float32_sin is:
-
-
CAMLprim value float32_sin(value vN, value vX, value vY) {
- ...
-}
-
To define a C primitive to interface with OCaml, we use the CAMLprim macro. Unlike normal C functions, all the input types and output type are defined as value instead of int, void etc. It is represents OCaml values and encodes objects of several base types such as integers, strings, floats, etc. as well as OCaml data structures. The specific type of input will be passed in when the functions is called at runtime.
-Now let’s look at the content within this function. First, the input is of type value and we have to change them into the normal types for further processing.
-
-
CAMLparam3(vN, vX, vY);
-int N = Long_val(vN);
-struct caml_ba_array *X = Caml_ba_array_val(vX);
-float *X_data = (float*) X->data;
-struct caml_ba_array *Y = Caml_ba_array_val(vY);
-float *Y_data = (float *) Y->data;
-
These “value” type parameters or local variables must be processed with one of the CAMLparam macros. Here we use the CAMLparam3 macro since there are three parameters. There are six CAMLparam macros from CAMLparam0 to CAMLparam5, taking zero to five parameters. For more than five parameters, you can first call CAMLparam5, and then use one or more CAMLxparam1 to CAMLxparam5 functions after that.
-The next step we convert the value type inputs into normal types. The Long_val macro convert the value into long int type. Similarly, there are also Double_val, Int32_val etc. We convert the Bigarray to a structure to the structure of type caml_ba_array. The function Caml_ba_array_val returns a pointer to this structure. Its member data is a pointer to the data part of the array. Besides, the information of ndarray dimension is also included. The member num_dims of caml_ba_array is the number of dimensions, and dim[i] is the i-th dimension.
-One more thing to do before the “real” coding. If the computation is complex, we don’t want all the OCaml threads to be stuck. Therefore, we need to call the caml_release_runtime_system function to release the master lock and other OCaml resources, so as to allow other threads to run.
-
-
caml_release_runtime_system();
-
Finally, we can do the real computation, and now that we have finished converting the input data to the familiar types, the code itself is straight forward;
-
-
float *start_x, *stop_x;
-float *start_y;
-
-start_x = X_data;
-stop_x = start_x + N;
-start_y = Y_data;
-
-while (start_x != stop_x) {
- float x = *start_x;
- *start_y = sinf(X);
- start_x += 1;
- start_y += 1;
-};
-
That’s all, we move the pointers forward and apply the sinf function from the C standard library one by one.
-As you can expect, when all the computation is finished, we need to end the multiple threading.
-
-
caml_acquire_runtime_system();
-
And finally, we need to return the result with CAMLreturn macro – not normal type, but the value type. In this function we don’t need to return anything, so we use the Val_unit macro:
-
-That’s all for this function. But if we want to return a, say, long int, you can the use Val_long to wrap an int type into value type. In the Owl core C code, we normally finish the all the computation and copy the result in-place, and then returns Val_unit, as shown in this example.
-Now that we finish float32_sin, we can copy basically all the code above and implement the rest three functions: float64_sin, complex32_sin, and complex64_sin. However, this kind of coding practice is apparently not ideal. Instead, in the core implementation, Owl utilises the macros and templates of C. In the above implementation, we abstract out the only three special part: function name, math function used, and data type. We assign macro FUN to the first one, MAPFN to the next, and NUMBER to the third. Then the function is written as a template:
-
-
CAMLprim value FUN(value vN, value vX, value vY) {
- ...
- NUMBER *X_data = (NUMBER *) X->data;
- ...
- *start_y = (MAPFN(x));
- ...
-}
-
This template is defined in the file owl_ndarray_maths_map.h file. In anther stub C file, these macros are defined as:
-
-
#define FUN float32_sin
-#define NUMBER float
-#define MAPFN(X) (sinf(X))
-#include "owl_ndarray_maths_map.h"
-
In this way, we can easily extend this template to other data types. To extend it to complex number, we can use the _Complex float and _Complex double as number type, and the csinf and csin for math function function on complex data type.
-
-
#define FUN4 complex32_sin
-#define NUMBER _Complex float
-#define MAPFN(X) (csinf(X))
-#include "owl_ndarray_maths_map.h"
-
Once finished the template, we can find that, this template does not only apply to sin, but also the other triangular functions, and many more other similar unary math function that accept one input, such as exp and log, etc.
-
-
#define FUN float32_log
-#define NUMBER float
-#define MAPFN(X) (logf(X))
-#include "owl_ndarray_maths_map.h"
-
Of course, the template can become quite complex for other types of function. But by utilising the template and macros, the core C code of Owl is much simplified. A brief recap: in the core module we are talking about three files. The first one is a ocaml file that contains functions like _owl_sin that interfaces to C code using external keyword. Then the C implementation is divided into the template file, normally as a .h header file, and is named as *_impl.h. The stub that finally utilises these templates to generate functions are put into *_stub.c files.
-Note that if the input parameters are more than 5, then two primitives should be implemented. The first bytecode function takes two arguments: a pointer to a list of value type arguments, and an integer that indicating the number of arguments provided. The other native function takes its arguments directly. The syntax of using external should also be changed to include both functions.
-
-
external name : type = bytecode-C-function-name native-code-C-function-name
-
For example, in our implementation of convolution we have a pair of functions:
-
-
CAMLprim value FUN_NATIVE (spatial) (
- value vInput_ptr, value vKernel_ptr, value vOutput_ptr,
- value vBatches, value vInput_cols, value vInput_rows, value vIn_channel,
- value vKernel_cols, value vKernel_rows,
- value vOutput_cols, value vOutput_rows, value vOut_channel,
- value vRow_stride, value vCol_stride,
- value vPadding, value vRow_in_stride, value vCol_in_stride
-) {
- ....
-}
-
-CAMLprim value FUN_BYTE (spatial) (value * argv, int argn) {
- return FUN_NATIVE (spatial) (
- argv[0], argv[1], argv[2], argv[3], argv[4], argv[5], argv[6], argv[7],
- argv[8], argv[9], argv[10], argv[11], argv[12], argv[13], argv[14],
- argv[15], argv[16]
- );
-}
-
In the stub we define the function name macros:
-
-
#define FUN_NATIVE(dim) stub_float32_ndarray_conv ## _ ## dim ## _ ## native
-#define FUN_BYTE(dim) stub_float32_ndarray_conv ## _ ## dim ## _ ## bytecode
-
And therefore in the OCaml interfacing code we interface to C code with:
-
-
external owl_float32_ndarray_conv_spatial
- : ('a, 'b) owl_arr -> ('a, 'b) owl_arr -> ('a, 'b) owl_arr -> int -> int -> int -> int -> int -> int -> int -> int -> int -> int -> int -> int -> int -> int -> unit
- = "stub_float32_ndarray_conv_spatial_bytecode" "stub_float32_ndarray_conv_spatial_native"
-
More details of interfacing to C code OCaml can be found in the OCaml documentation. Another approach is to use the Foreign Function Interface, as explained here.
-
-
-
-Optimisation Techniques
-There is a big room for optimising the C code. We are trying to push the performance forward with multiple techniques. We mainly use the multiprocessing with OpenMP and parallel computing using SIMD intrinsics when possible. In this section, We choose some representative operations to demonstrate our optimisation of the core ndarray operations. Besides them, we have also applied other basic C code optimisation techniques such as avoiding redundant computation in for-loop.
-To show how these optimisation works, we compare performance of an operation, in different numerical libraries: Owl, NumPy, Julia, and Eigen. The purpose is two-fold: first, to bring insight into the low-level structure design; second, to demonstrate the possible optimisations in implementing these operations.
-In the performance measurements, we use multiple input sizes, and observe the execution time and memory usage. The experiments are conducted on both a laptop (Thinkpad T460s, Core i5 CPU) and a Raspberry Pi (rPi) 3B model. They represent different CPU architectures and computation power.
-
-Map Operations
-The map operations are a family of operations that accept ndarray as input, and apply a function on all the elements in the ndarray. Again, we use the trigonometric sin operation as a representative map arithmetic operation in this section. It requires heavy computation. In the implementation, it directly calls the low-level C functions via a single template. The performance of such operation is mainly decided by the linked low level library. Map function can also benefit from parallel execution on the multi-core CPU, such as using OpenMP.
-OpenMP is one of the most common parallel programming models in use today. Unlike pthread, the low-level API to work with threads, OpenMP operate at a high-level and is much more portable. It uses a “Fork–join model” where the master thread spawns other threads as necessary, as shown in [@fig:core-opt:fork-join].
-
- Fork-join model used by OpenMP
-
-
Fork-join model used by OpenMP
-
-In the C code we can create threads with the omp parallel pragma. For example, to create a four-thread parallel region, we can use:
-
-
omp_set_num_threads(4);
-#pragma omp parallel
-{
- /* parallel region */
- ...
-}
-
The task in the region is assigned to the four threads and get executed in parallel. The most frequently used pattern in our core code is to move a for-loop into the parallel region. Each thread is assigned part of the whole input array, and apply the math computation on each element in parallel. Taking the implementation code from previous chapter, we only need to add a single line of OpenMP compiler directive:
-
-
#pragma omp parallel for schedule(static)
-for (int i = 0; i < N; i++) {
- NUMBER x = *(start_x + i);
- *(start_y + i) = (MAPFN(x));
-}
-
The for-loop is included in parallel region, and the N elements are scheduled to each thread. In the code we use the static scheduling, which means scheduling is done at compile time. It works best when the each iterations take roughly equal time. Otherwise we can consider using the “dynamic” scheduling that happens at runtime, or “auto” scheduling when the runtime can learn from previous executions of the same loop.
-That’s all. We apply it simple techniques to the templates of many map function. Note that OpenMP comes with a certain overhead. What if we don’t want to use the OpenMP version?
-Our solution is to provide two sets of C templates and switch depending on configuration flags. For example, for the map functions, we have the normal template file “owl_ndarray_maths_map.h”, and then a similar one “owl_ndarray_maths_map_omp.h” where each template uses the OpenMP derivative. We can then switch between these two implementation by simply define or un-define the _OPENMP macro, which can easily be done in the configuration file.
-
-
#ifdef _OPENMP
-#define OWL_NDARRAY_MATHS_MAP "owl_ndarray_maths_map_omp.h"
-#else
-#define OWL_NDARRAY_MATHS_MAP "owl_ndarray_maths_map.h"
-#endif
-
OpenMP is surely not only utilised in the map function. We also implement OpenMP-enhanced templates for the fold operations, comparison operations, slicing, and matrix swap, etc.
-Another optimisation is to remove the memory copy phase by applying mutable operations. A mutable operation does not create new memory space before calculation, but instead utilise existing memory space of input ndarray. This kind of operations does not involve the C code, but rather in the ndarray module. For example:
-
-
let sin_ ?out x =
- let out =
- match out with
- | Some o -> o
- | None -> x
- in
- _owl_sin (kind x) (numel x) x out
-
The _owl_sin function is still the same, but in this mutable function sin_ we choose the destination array and source array to be the same. Therefore, the existing memory is utilised and we don’t have to copy the previous content to a new memory space before the calculation.
-Both vectorisation and parallelisation techniques can be utilised to improve its performance. Computation-intensive operations such as sine in a for-loop can be vectorised using SIMD instructions. The computation performance can be boosted by executing single instruction on multiple data in the input ndarray. In that way, with only one core, 4 or 8 elements in the for-loop can be processed at the same time. However, unlike OpenMP, we cannot say “apply sine operation on these 4 elements”. The SIMD intrinsics, such as the ones provided by Intel, only support basic operations such as copy, add, etc. To implement functions such as sine and exponential is non-trivial task. One simple implementation using the SSE instruction set is here. More and more libraries such as the Intel MKL provide SIMD version of these basic math operations instead of that provided in the standard C library.
-Let’s look at how our implementation of the sin operation performs compared with the other libraries. To measure performance, we compare the sine operation in Owl, NumPy, Julia, and C. The compiling flags in C and Owl are set to the same level 3 optimisation. The input is a vector of single-precision float numbers. We increase the input size from 100,000 to 5,000,000 gradually. The comparison results are shown in [@fig:core-opt:op_eval_sin].
-
- Sin operation performance.
-
-
Sin operation performance.
-
-It can be seen that the execution time in Owl grows linearly with input size, and very similar to that of C library. Julia has large deviation, but it performs fastest on rPi, even faster than C. It is because of Julia utilises NEON, the SIMD architecture extension on ARM. In some cases, NumPy can be compiled with MKL library. The MKL Vector Math functions provide highly optimised routines for trigonometric operations. In this evaluation we use NumPy library that is not compiled with MKL, and it performs close to Owl and C, with slightly larger deviation.
-
-
-Convolution Operations
-The convolution operations take up the majority of computation involved in deep neural network, and therefore is the main target of our core optimisation. We have seen how the convolution works and the Neural Network chapter. In this section, we would like to go a bit deeper and talk about its implementation. Starting with ta short recap of how the convolution works.
-A convolution operation takes two ndarrays as input: image (\(I\)) and kernel (\(F\)). In a 2-dimensional convolution, both ndarrays are of four dimensions. The image ndarray has \(B\) batches, each image has size \(H\times W\), and has \(IC\) channels. The kernel ndarray has \(R\) rows, \(C\) columns, the same input channel \(IC\), and output channel \(K\). The convolution can then be expressed as:
-\[CONV_{b,h,w,k} = \sum_{ic=1}^{IC}\sum_{r=1}^{R}\sum_{c=1}^{C}I_{b,h+r,w+c,ic}F_{r,c,ic,k}.\] {#eq:core-opt:conv}
-A naive convolution algorithm is to implement [@eq:core-opt:conv] with nested for-loops. It is easy to see that this approach does not benefit from any parallelisation, and thus not suitable for production code.
-
- Basic implementation algorithm of convolution: im2col
-
-
Basic implementation algorithm of convolution: im2col
-
-The next version of implementation uses the im2col method. A im2col-based convolution transforms the input ndarray into a matrix with redundancy. This process can be explained clearly with [@fig:core-opt:im2col]. In this example, we start with an input image of shape 4x4, and has 3 output channels. Each channel is denoted by a different colour. Besides, the index of each element is also show in the figure. The kernel is of shape 2x2, has 3 input channels as the input image. Each channel has the same colour as the corresponding channel of input image. The 2 output channels are differentiated by various level of transparency in the figure. According to the definition of convolution operation, we use the kernel to slide over the input image step by step, and at each position, an element-wise multiplication is applied. Here in this example, we use a stride of 1, and a valid padding. In the first step, the kernel starts with the position where the element indices are [1,2,5,6] in the first input channel, [17,18,21,22] in the second input channel, and [33,34,37,38] in the third input channel. The element-wise multiplication result is filled into corresponding position in the output ndarray. Moving on to the second position, the input indices become [2,3,6,7,18,19,22,23,34,35,38,39]. So on and so forth. This process can be simplified as one matrix multiplication. The first matrix is just the flattened kernel. The second matrix is based on the input ndarray. Each column is a flattened sub-block of the same size as one channel of the kernel. This approach is the basic idea of the im2col algorithm. Since the matrix multiplication is a highly optimised operation in linear algebra packages such as OpenBLAS, this algorithm can be executed efficiently, and is easy to understand.
-However, this algorithm requires generating a large temporary intermediate matrix. It’s row number is kernel_col * kernel_rowl * input_channel, and its column number is output_col * output_row * batches. Even for a mediocre size convolution layer, the size of this intermediate input matrices is not small, not to mention for larger input/kernel sizes and with tens and hundreds of convolution layers together in a neural network. The memory usage can easily reach Gigabytes in DNN applications.
-There are several methods proposed to mitigate this problem. If you look closely at the intermediate matrix, you will find that it contains a lot of redundant information: the columns overlap too much. Algorithms such as Memory-efficient Convolution aims to reduce the size of this intermediate matrix based on not generating the whole intermediate matrix, but only part of it to efficiently utilise the overlapped content. But even so, it may still fail with very large input or kernel sizes.
-The implementation in Eigen provides another solution. Eigen a C++ template library for linear algebra. Think of it as an alternative to BLAS etc. Based on its core functionalities, it implements convolution operations as a unsupported module. Eigen is a widely used library to support high-performance convolution operations, and was used as computation backend of TensorFlow on CPU devices. The convolution operation is first implemented in Owl by interfacing to the Eigen library. We later turn to C implementation since interfacing to this C++ library proves to be problematic and leads to a lot of installation issues. In its implementation, Eigen solves this memory usage problem according to the method proposed in [@goto2008anatomy].
-It still generally follows the previous matrix multiplication approach, but instead of generating the whole intermediate matrix, it cuts the input and kernel matrices into small blocks one at a time so that the memory usage is limited no matter how large the input and kernel are.
-Specifically, the block size can be chosen in a way to fit into the L1/L2 cache of CPU to do high-performance computation. Multiplication of two matrices can be divided into multiplication of small blocks. The L1/L2/L3 cache sizes are retrieved using the CPUID instruction on x86 architecture, and predefined constant value for non-x86 architectures.
-To further improve the performance, we use the SIMD intrinsics during building those small temporary matrices from input ndarray. We focus on the main operation that copy input ndarray into the new input matrix: loading data, storing data, and adding two vectors. Currently we only support the most recent Advanced Vector Extensions (AVX) x86 extension on Intel and AMD architectures. We detect if the AVX extension is supported by detecting if the __AVX__ is detected in GCC. If so, we include the header filer immintrin.h.
-The extends commands to 256 bits, so that we can process eight float or 4 double elements at the same time. In the code we mainly use the _mm256_store_ps, _mm256_load_ps, and _mm256_add_ps intrinsics, for storing 256-bits variable from source into memory, loading 256-bits to memory, or adding two 256-bits into destination variable. Note that the load and store intrinsics require the source or destination address to be aligned on a 32-byte boundary. If not, we need to use the unaligned version _mm256_storeu_ps and _mm256_loadu_ps, with degraded performance.
-To maximise the performance of caching, we need to make the memory access as consecutive as possible. Depending on the input channel is divisible by the supported data length of SIMD (e.g. 8 float numbers for AVX), we provide two set of implementations for filling the temporary blocks. If input channel is divisible by data length, the input matrix can always be loaded consecutively at a step of data length with the AVX intrinsics, otherwise we have to build the temporary matrix blocks with less AVX intrinsics, on only part of the matrix, and then take care of the edge cases.
-We have described the implementation method we use to optimise the convolution operations. We recommend reading the full code in owl_ndarray_conv_impl.h file for more details. One more optimisation is that, we have shown the im2col method and its disadvantage with memory usage. However, it is still straightforward and fast with small input sizes. Therefore, we set a pre-defined threshold to decide if we use the im2col implementation or the one that inspired by Eigen.
-As you know, convolution operations consists of three types: Conv, ConvBackwardKernel, ConvBackwardInput. The Conv operation calculates the output given input image and kernel. Similarly, ConvBackwardKernel calculates the kernel given the input and output ndarrays, and ConvBackwardInput gets input ndarray from kernel and output. The last two are mainly used in the backpropagation phase in training a DNN, but all three operations share a similar calculation algorithm. The backward convs are actually also implemented as matrix multiplication. For ConvBackwardKernel, it first reshape the output ndarray as matrix, and multiply it with the intermediate input matrix. Similarly, in ConvBackwardInput, we need to first multiply the kernel and output matrix to get the intermediate input matrix, and then re-construct the input ndarray based on it.
-These implementation can then be easily extended to the three dimension and one dimension cases. Besides, the transpose convolutions and diluted convolutions are only variate of normal convolution and the code only needs to be slightly changed. At the OCaml level, mutable convolution operations are also provided, so as to further improve performance by utilising existing memory space.
-To measure the performance of my convolution implementation, we compare the three convolution operations in Owl with that in the Eigen. We use two settings: fixed input size with varying kernel size; and fixed kernel size with varying input size. The Owl code is interfaced to existing implementation and Eigen library. The results shown below are performed on the single board computer Raspberry Pi 4. The results show the effectiveness of our implementation of convolution operations compared with that of the Eigen library. This good performance comes from the combination of multiple optimisation techniques as well as choosing suitable implementation according to the input.
-
- Compare the execution time of Conv2D operation of Owl and Eigen
-
-
-
-
Compare the execution time of Conv2D operation of Owl and Eigen
-
-
-
-Reduction Operations
-As in the parallel programming model, the map operations are accompanied by another group: the reduction operations, or the fold operations as they are sometimes called. Reduction operations such as sum and max accumulate values in an ndarray along certain axes by certain functions. For example, a 1-dimension ndarray (vector) can be reduced to one single number along the row dimension. The result can be the sum of all the elements if the sum operation is used, or the max of these elements if it is the max operation. The reduction operations are among the key operation that are key to high level applications. For example, sum is used for implementing the BatchNormalisation neuron, which is a frequently used neuron in DNN.
-Apparently, the fold operations follow similar pattern, and that leads to the similar design choice as the map operations using templates. The implementation of the reduction operations are summarised into several patterns, which are contained in the owl_ndarray_maths_fold.h file as templates. In most cases these templates we only need to define the accumulation function ACCFN. Same with the map functions, these macros are defined in the stub file owl_ndarray_maths_stub.c. For example, for the sum function of float precision, I define the accumulation function as #define ACCFN(A,X) A += X}.
-The reduction operation often needs a specified axis. One challenge we were faced with is the multi-axis reduction. A naive implementation is to repeat the operation along one axis for each axis specified, and then repeat this procedure on the next axis. However, each single-axis reduction needs extra temporary memory for storing the intermediate result. In applications that heavily utilises the reduction operation such as a DNN, the inefficiency of reduction operations becomes a memory and performance bottleneck.
-In a single-axis reduction algorithm, it needs to reduce source ndarray x into a smaller destination ndarray y. Suppose the dimension to be reduced is of size \(a\), and total number of elements in x is \(n\). Then the basic idea in iterate their elements one by one, but the index in y keeps returning to 0 when it reaches \(a/n - 1\). We revise this process so that the index in y can keep the re-iterating according to given axes, all using one single piece of intermediate memory.
-One optimisation step before this algorithm is to combine adjacent axes. For example, if an ndarray of shape [2,3,4,5] is to be reduced along the second and third axis, then it can be simplified to reducing an ndarray of shape [2,12,5].
-
- Sum reduction operation on laptop
-
-
Sum reduction operation on laptop
-
-Since it involves multiple axes, to evaluate the reduction operation, we use a four-dimensional ndarray of float numbers as input. All four dimensions are of the same length. We measure the peak memory usage with increasing length, each for axis equals to 0, 1, and both 0 and 2 dimension. The evaluation result compared with NumPy and Julia is shown in [@fig:core-opt:opeval_sumreduce].
-
-
-Repeat Operations
-The repeat operation repeats elements of an ndarray along each axis for specified times. For example, a vector of shape [2,3] can be expanded to shape [4,3] if repeated along the first axis, or [2,6] along the second axis. It consists of inner repeat and outer repeat (or tile). The former repeats elements of an input ndarray, while the later constructs an ndarray by repeating the whole input ndarray by specified number of times along each axis.
-Repeat is another operation that is frequently used in DNN, especially for implementing the Upsampling and BatchNormalisation neurons. While a reduction operation ``shrinks’’ the input ndarray, a repeat operations expands it. Both operation require memory management instead of complex computation. Each repeat along one axis require creating extra memory space for intermediate result. Therefore, similar to the reduction functions, to perform multi-axis repeat. simply using existing operations multiple times leads to memory bottleneck for the whole application.
-To this end, I implement the multi-axis repeat operation in Owl. The optimisation I use in the algorithm follows two patterns. The first is to provide multiple implementations for different inputs. For example, if only one axis is used or only the highest dimension is repeated, a specific implementation for that case would be much faster than a general solution. The second is to reduce creating intermediate memory. A repeat algorithm is like a reverse of reduction: it needs expand the source ndarray x into a larger destination ndarray y. Using the elements to be repeated as a block, the repeat operation copies elements from x to y block by block. The index in both ndarrays move by a step of block size, though at different cycles. In the revised implementation, the intermediate memory is only created once and the all the iteration cycles along different axes are finished within the same piece of memory.
-
- Repeat operation speed
-
-
Repeat operation speed
-
-Compared to this implementation, the multi-axis repeat operation in NumPy is achieved by running multiple single-axis repeat, and thus is less efficient in both memory usage and execution time. The repeat operation in Julia is much slower. One reason is that this operation is implemented in pure Julia rather than the efficient C code. Another reason is that repeat is not a computation-intensive operation, so the optimisation techniques such as static compilation and vectorisation are of less importance than algorithm design.
-The evaluation of repeat is similar to that of reduction operations. We use a four-dimensional ndarray of float numbers as input. All four dimensions are of the same length. We measure the speed for increasing length, the repetition times is set to 2 on all dimensions.
-
- Repeat operation memory usage comparison
-
-
Repeat operation memory usage comparison
-
-The evaluation results compared with NumPy and Julia are shown in [@fig:core-opt:opeval_repeat]. We also measure the peak memory usage in[@fig:core-opt:opeval_tp_repeat_mem_00]. As can be seen, my repeat operation achieves about half of that in NumPy with regard to both execution speed and memory usage. The outer repeat operation in NumPy is implemented using the single axis version, and thus is less efficient. The repeat operation in Julia is much slower. One reason is that repeat is not a computation-intensive operation, so the optimisation techniques such as static compilation and vectorisation are of less importance than algorithm design.
-
-
-
-
- Next: Chapter 20Automatic Empirical Tuning
\ No newline at end of file
diff --git a/docs/css/app.css b/docs/css/app.css
deleted file mode 100644
index f507b7f..0000000
--- a/docs/css/app.css
+++ /dev/null
@@ -1,1459 +0,0 @@
-@charset "UTF-8";
- meta.foundation-version {
- font-family: "/5.3.3/";
-}
- meta.foundation-mq-small {
- font-family: "/only screen/";
- width: 0em;
-}
- meta.foundation-mq-medium {
- font-family: "/only screen and (min-width:40.063em)/";
- width: 40.063em;
-}
- meta.foundation-mq-large {
- font-family: "/only screen and (min-width:64.063em)/";
- width: 64.063em;
-}
- meta.foundation-mq-xlarge {
- font-family: "/only screen and (min-width:90.063em)/";
- width: 90.063em;
-}
- meta.foundation-mq-xxlarge {
- font-family: "/only screen and (min-width:120.063em)/";
- width: 120.063em;
-}
- meta.foundation-data-attribute-namespace {
- font-family: false;
-}
- html, body {
- height: 100%;
-}
- *, *:before, *:after {
- -webkit-box-sizing: border-box;
- -moz-box-sizing: border-box;
- box-sizing: border-box;
-}
- html, body {
- font-size: 100%;
-}
- body {
- background: white;
- color: #444444;
- padding: 0;
- margin: 0;
- font-family: "rooney-web", Georgia, Cambria, "Times New Roman", Times, serif;
- font-weight: 300;
- font-style: normal;
- line-height: 150%;
- position: relative;
- cursor: default;
-}
- a:hover {
- cursor: pointer;
-}
- img {
- max-width: 100%;
- height: auto;
-}
- img {
- -ms-interpolation-mode: bicubic;
-}
- #map_canvas img, #map_canvas embed, #map_canvas object, .map_canvas img, .map_canvas embed, .map_canvas object {
- max-width: none !important;
-}
- .left {
- float: left !important;
-}
- .right {
- float: right !important;
-}
- .clearfix:before, .clearfix:after {
- content: " ";
- display: table;
-}
- .clearfix:after {
- clear: both;
-}
- .hide {
- display: none;
-}
- .antialiased {
- -webkit-font-smoothing: antialiased;
- -moz-osx-font-smoothing: grayscale;
-}
- img {
- display: inline-block;
- vertical-align: middle;
-}
- textarea {
- height: auto;
- min-height: 50px;
-}
- select {
- width: 100%;
-}
- .text-left {
- text-align: left !important;
-}
- .text-right {
- text-align: right !important;
-}
- .text-center {
- text-align: center !important;
-}
- .text-justify {
- text-align: justify !important;
-}
- @media only screen and (max-width: 40em) {
- .small-only-text-left {
- text-align: left !important;
- }
- .small-only-text-right {
- text-align: right !important;
- }
- .small-only-text-center {
- text-align: center !important;
- }
- .small-only-text-justify {
- text-align: justify !important;
- }
-}
- @media only screen {
- .small-text-left {
- text-align: left !important;
- }
- .small-text-right {
- text-align: right !important;
- }
- .small-text-center {
- text-align: center !important;
- }
- .small-text-justify {
- text-align: justify !important;
- }
-}
- @media only screen and (min-width: 40.063em) and (max-width: 64em) {
- .medium-only-text-left {
- text-align: left !important;
- }
- .medium-only-text-right {
- text-align: right !important;
- }
- .medium-only-text-center {
- text-align: center !important;
- }
- .medium-only-text-justify {
- text-align: justify !important;
- }
-}
- @media only screen and (min-width: 40.063em) {
- .medium-text-left {
- text-align: left !important;
- }
- .medium-text-right {
- text-align: right !important;
- }
- .medium-text-center {
- text-align: center !important;
- }
- .medium-text-justify {
- text-align: justify !important;
- }
-}
- @media only screen and (min-width: 64.063em) and (max-width: 90em) {
- .large-only-text-left {
- text-align: left !important;
- }
- .large-only-text-right {
- text-align: right !important;
- }
- .large-only-text-center {
- text-align: center !important;
- }
- .large-only-text-justify {
- text-align: justify !important;
- }
-}
- @media only screen and (min-width: 64.063em) {
- .large-text-left {
- text-align: left !important;
- }
- .large-text-right {
- text-align: right !important;
- }
- .large-text-center {
- text-align: center !important;
- }
- .large-text-justify {
- text-align: justify !important;
- }
-}
- @media only screen and (min-width: 90.063em) and (max-width: 120em) {
- .xlarge-only-text-left {
- text-align: left !important;
- }
- .xlarge-only-text-right {
- text-align: right !important;
- }
- .xlarge-only-text-center {
- text-align: center !important;
- }
- .xlarge-only-text-justify {
- text-align: justify !important;
- }
-}
- @media only screen and (min-width: 90.063em) {
- .xlarge-text-left {
- text-align: left !important;
- }
- .xlarge-text-right {
- text-align: right !important;
- }
- .xlarge-text-center {
- text-align: center !important;
- }
- .xlarge-text-justify {
- text-align: justify !important;
- }
-}
- @media only screen and (min-width: 120.063em) and (max-width: 99999999em) {
- .xxlarge-only-text-left {
- text-align: left !important;
- }
- .xxlarge-only-text-right {
- text-align: right !important;
- }
- .xxlarge-only-text-center {
- text-align: center !important;
- }
- .xxlarge-only-text-justify {
- text-align: justify !important;
- }
-}
- @media only screen and (min-width: 120.063em) {
- .xxlarge-text-left {
- text-align: left !important;
- }
- .xxlarge-text-right {
- text-align: right !important;
- }
- .xxlarge-text-center {
- text-align: center !important;
- }
- .xxlarge-text-justify {
- text-align: justify !important;
- }
-}
-/* Typography resets */
- div, dl, dt, dd, ul, ol, li, h1, h2, h3, h4, h5, h6, pre, form, p, blockquote, th, td {
- margin: 0;
- padding: 0;
-}
-/* Default Link Styles */
- a {
- color: #8e44ad;
- text-decoration: none;
- line-height: inherit;
-}
- a:hover, a:focus {
- color: #7a3a95;
-}
- a img {
- border: none;
-}
-/* Default paragraph styles */
- p {
- font-family: inherit;
- font-weight: 300;
- font-size: 1rem;
- line-height: 1.4;
- margin-bottom: 1.25rem;
- text-rendering: optimizeLegibility;
- max-width: 750px;
-}
- p.lead {
- font-size: 1.5rem;
- line-height: 1.6;
-}
- p aside {
- line-height: 1.35;
- font-style: italic;
- }
-
- h1 {
- font-size:32px;
- font-size:2rem; /* 32px */
- line-height:1.5; /* 48px */
-}
-h2 {
- font-size:1.5em; /* 24px */
- line-height:1; /* 24px */
-}
-h3 {
- font-size:20px;
- font-size:1.25rem; /* 20px */
- line-height:1.2; /* 24px */
-}
-h4 {
- font-size:18px;
- font-size:1.125rem; /* 18px */
- line-height:1.333; /* 24px */
-}
-h5 {
- font-size:16px;
- font-size:1rem; /* 16px */
- line-height:1.5; /* 24px */
-}
-h6 {
- font-size:16px;
- font-size:1rem; /* 16px */
- line-height:1.5; /* 24px */
-}
-/* Default header styles */
- h1, h2, h3, h4, h5, h6 {
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- font-weight: 300;
- font-style: 300;
- color: #222222;
- text-rendering: optimizeLegibility;
- margin-top: 0;
- margin-bottom: 1.25rem;
- line-height: 1;
-}
- h1 small, h2 small, h3 small, h4 small, h5 small, h6 small {
- font-size: 40%;
- color: #6f6f6f;
- line-height: 0;
-}
- .subheader {
- line-height: 1.4;
- color: #6f6f6f;
- font-weight: 300;
- margin-top: 0.2rem;
- margin-bottom: 0.5rem;
-}
- hr {
- border: solid #dddddd;
- border-width: 1px 0 0;
- clear: both;
- margin: 1.25rem 0 1.1875rem;
- height: 0;
-}
-/* Helpful Typography Defaults */
- em, i {
- font-style: italic;
- line-height: inherit;
-}
- strong, b {
- font-weight: bold;
- line-height: inherit;
-}
- small {
- font-size: 40%;
- line-height: inherit;
-}
- code {
- font-family: Consolas, "Liberation Mono", Courier, monospace;
- font-weight: 300;
- color: #333333;
- background-color: transparent;
- border-width: 0;
- border-style: solid;
- border-color: #adadad;
- border-radius: 3px;
- padding: 0;
- line-height: 1.2;
- vertical-align: baseline;
- text-transform: none !important;
-}
-/* Lists */
- ul, ol, dl {
- line-height: 1.5;
- margin-bottom: 1.25rem;
- list-style-position: inside;
- font-family: inherit;
-}
- ul {
- margin-left: 1.1rem;
-}
- ul.no-bullet {
- margin-left: 0;
-}
- ul.no-bullet li ul, ul.no-bullet li ol {
- margin-left: 1.25rem;
- margin-bottom: 0;
- list-style: none;
-}
-/* Unordered Lists */
- ul li ul, ul li ol {
- margin-left: 1.25rem;
- margin-bottom: 0;
-}
- ul.square li ul, ul.circle li ul, ul.disc li ul {
- list-style: inherit;
-}
- ul.square {
- list-style-type: square;
- margin-left: 1.1rem;
-}
- ul.circle {
- list-style-type: circle;
- margin-left: 1.1rem;
-}
- ul.disc {
- list-style-type: disc;
- margin-left: 1.1rem;
-}
- ul.no-bullet {
- list-style: none;
-}
-/* Ordered Lists */
- ol {
- margin-left: 1.4rem;
-}
- ol li ul, ol li ol {
- margin-left: 1.25rem;
- margin-bottom: 0;
-}
-/* Definition Lists */
- dl dt {
- margin-bottom: 0.3rem;
- font-weight: bold;
-}
- dl dd {
- margin-bottom: 0.75rem;
-}
-/* Abbreviations */
- abbr, acronym {
- text-transform: uppercase;
- font-size: 80%;
- color: #444444;
- border-bottom: 1px dotted #dddddd;
- cursor: help;
-}
- abbr {
- text-transform: none;
-}
-/* Blockquotes */
- blockquote {
- margin: 0 0 1.25rem;
- padding: 0.5625rem 1.25rem 0 1.1875rem;
- border-left: 1px solid #dddddd;
-}
- blockquote cite {
- display: block;
- font-size: 80%;
- color: #555555;
-}
- blockquote cite:before {
- content: "\2014 \0020";
-}
- blockquote cite a, blockquote cite a:visited {
- color: #555555;
-}
- blockquote, blockquote p {
- line-height: 1.8;
- color: #6f6f6f;
-}
-/* Microformats */
- .vcard {
- display: inline-block;
- margin: 0 0 1.25rem 0;
- border: 1px solid #dddddd;
- padding: 0.625rem 0.75rem;
-}
- .vcard li {
- margin: 0;
- display: block;
-}
- .vcard .fn {
- font-weight: bold;
- font-size: 80%;
-}
- .vevent .summary {
- font-weight: bold;
-}
- .vevent abbr {
- cursor: default;
- text-decoration: none;
- font-weight: bold;
- border: none;
- padding: 0 0.0625rem;
-}
- @media only screen and (min-width: 40.063em) {
- h1, h2, h3, h4, h5, h6 {
- line-height: 1;
- }
-}
-/* * Print styles. * * Inlined to avoid required HTTP connection: www.phpied.com/delay-loading-your-print-css/ * Credit to Paul Irish and HTML5 Boilerplate (html5boilerplate.com) */
- .print-only {
- display: none !important;
-}
- @media print {
- * {
- background: transparent !important;
- color: #000 !important;
- /* Black prints faster: h5bp.com/s */
- box-shadow: none !important;
- text-shadow: none !important;
- }
- a, a:visited {
- text-decoration: underline;
- }
- a[href]:after {
- content: " (" attr(href) ")";
- }
- abbr[title]:after {
- content: " (" attr(title) ")";
- }
- .ir a:after, a[href^="javascript:"]:after, a[href^="#"]:after {
- content: "";
- }
- pre, blockquote {
- border: 1px solid #999;
- page-break-inside: avoid;
- }
- thead {
- display: table-header-group;
- /* h5bp.com/t */
- }
- tr, img {
- page-break-inside: avoid;
- }
- img {
- max-width: 100% !important;
- }
- @page {
- margin: 0.5cm;
- }
- p, h3 {
- orphans: 3;
- widows: 3;
- }
- h3 {
- page-break-after: avoid;
- }
- .hide-on-print {
- display: none !important;
- }
- .print-only {
- display: block !important;
- }
- .hide-for-print {
- display: none !important;
- }
- .show-for-print {
- display: inherit !important;
- }
-}
- body:after {
- content: '';
- display: block;
- position: fixed;
- z-index: 1;
- top: 0;
- width: 100%;
- border-top: 3px solid #8e44ad;
-}
- h1, h2, h3, h4, h5, h6, p, ul li, ol li {
- font-feature-settings: "kern" 1;
- font-kerning: normal;
-}
- h1 small, h2 small {
- display: block;
- text-transform: uppercase;
- line-height: 1.4;
-}
- h4 {
- text-transform: uppercase;
- font-weight: bold;
- color: #777777;
-}
- h5, h6 {
- text-transform: uppercase;
- font-weight: bold;
-}
- p:last-child, pre:last-child, ul:last-child, ol:last-child, dl:last-child {
- margin-bottom: 0;
-}
- @media only screen and (max-width: 40em) {
- p, pre, ul, ol, dl {
- font-size: 80%;
- }
-}
- a h1, a h2 {
- color: #8e44ad;
-}
- .wrap {
- background: white;
- width: 100%;
- margin-left: auto;
- margin-right: auto;
- margin-top: 0;
- margin-bottom: 0;
- max-width: 573.75rem;
- position: relative;
-}
- .wrap:before, .wrap:after {
- content: " ";
- display: table;
-}
- .wrap:after {
- clear: both;
-}
- .wrap > .row {
- max-width: 73.75rem;
- margin: 0 auto;
-}
- .wrap .left-column {
- display: none;
-}
- .wrap .main-body {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 100%;
- float: none;
- padding-bottom: 1.6875rem;
- margin-top: 1.6875rem;
-}
- .wrap .index-toc-holder, .wrap .author-holder, .wrap .extras-holder {
- clear: both;
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 100%;
- float: none;
- margin-top: 1.6875rem;
- margin-bottom: 1.6875rem;
-}
- .wrap .author-holder, .wrap .extras-holder {
- border-top: 1px solid #dddddd;
- overflow: hidden;
-}
- @media only screen and (min-width: 40.063em) {
- .wrap .main-body {
- max-width: 54rem;
- padding-bottom: 3.375rem;
- }
-}
- @media only screen and (min-width: 64.063em) {
- .wrap .left-column {
- display: block;
- padding-left: 0;
- padding-right: 0;
- width: 25%;
- float: left;
- padding-top: 1.6875rem;
- margin-left: 1.6875rem;
- padding-right: 1.6875rem;
- }
- .wrap .main-body {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 65%;
- float: left;
- margin-left: 30% !important;
- padding-bottom: 6.75rem;
- }
-}
- @media only screen and (min-width: 90.063em) {
- .wrap .left-column {
- width: 32rem;
- margin-left: 3.375rem;
- padding-right: 3.375rem;
- }
- .wrap .main-body {
- margin-left: 32rem !important;
- padding: 0 3.375rem 6.75rem;
- }
-}
- .title-bar {
- position: relative;
- z-index: 10;
- background: url("../images/plain-bg.jpg") no-repeat, #424b50 url("../images/bg.jpg") no-repeat right;
- background-size: auto 100%, auto;
- margin-bottom: 1.6875rem;
- border-bottom: 3px solid #8e44ad;
- width: 100%;
- margin-left: auto;
- margin-right: auto;
- margin-top: 0;
- margin-bottom: 0;
- max-width: 573.75rem;
-}
- .title-bar:before, .title-bar:after {
- content: " ";
- display: table;
-}
- .title-bar:after {
- clear: both;
-}
- .title-bar .title {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 100%;
- float: none;
- margin: 1.6875rem 0;
-}
- @media only screen and (min-width: 64.063em) {
- .title-bar {
- background: url("../images/book-cover.png") no-repeat, #424b50 url("../images/bg.jpg") no-repeat right;
- background-size: auto 100%, auto;
- padding-left: 20%;
- }
- .title-bar .title {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 66.66667%;
- float: left;
- margin-left: 12.5% !important;
- max-width: 54rem;
- }
-}
- @media only screen and (min-width: 90.063em) {
- .title-bar .title {
- margin-left: 32rem !important;
- padding: 0 3.375rem;
- }
-}
- .left-column {
- position: absolute;
- padding-bottom: 6.75rem;
- overflow-y: auto;
- font-weight: normal;
-}
- .left-column.top {
- top: 0;
-}
- .left-column.bottom {
- bottom: 0;
-}
- .left-column.true-fixed {
- position: fixed;
- top: 0;
- height: 100%;
-}
- .left-column .to-chapter {
- display: block;
- padding: 0.875rem 1rem;
- border: 1px solid #8e44ad;
- border-radius: 3px;
- transition: background 0.2s;
-}
- .left-column .to-chapter small {
- display: block;
-}
- .left-column .to-chapter h5 {
- margin: 0;
-}
- .left-column .to-chapter:hover {
- background: #e4d0ed;
-}
-/* Literal.String.Symbol */
- .splash .title h1, .title-bar .title h1 {
- font-family: "lexia", serif;
- font-weight: 100;
- margin: 0 0 0.3rem;
- color: white;
-}
- .splash .title h4, .title-bar .title h4 {
- color: white;
- margin: 0 0 0.3rem;
- font-weight: 300;
-}
- .splash .title h5, .title-bar .title h5 {
- color: rgba(255, 255, 255, 0.8);
- text-transform: none;
- font-family: "rooney-web", Georgia, Cambria, "Times New Roman", Times, serif;
- font-style: italic;
- font-weight: 300;
-}
- .splash nav, .title-bar nav {
- margin-top: 0.84375rem;
-}
- .splash nav a, .title-bar nav a {
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- font-weight: normal;
- color: white;
- text-transform: uppercase;
- font-size: 80%;
- display: inline-block;
- margin-right: 0.5rem;
- margin-bottom: 0.5rem;
- padding: 0.1rem 0.6rem;
- transition: background 0.2s;
- background: rgba(0, 0, 0, 0.1);
- border-radius: 3px;
-}
- .splash nav a:hover, .title-bar nav a:hover {
- background: rgba(0, 0, 0, 0.2);
-}
- .splash nav a.active, .title-bar nav a.active {
- background: none;
- text-decoration: underline;
-}
- .splash {
- position: relative;
- z-index: 10;
- border-bottom: 3px solid #8e44ad;
- width: 100%;
- margin-left: auto;
- margin-right: auto;
- margin-top: 0;
- margin-bottom: 0;
- max-width: 573.75rem;
-}
- .splash:before, .splash:after {
- content: " ";
- display: table;
-}
- .splash:after {
- clear: both;
-}
- .splash .image {
- position: relative;
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 100%;
- float: none;
- background: url("../images/book-cover.png") no-repeat left center;
- background-size: 265% auto;
- padding-bottom: 95%;
-}
- .splash .image:after {
- content: '';
- display: block;
- position: absolute;
- top: 85%;
- right: 0;
- bottom: 0;
- left: 0;
- background: linear-gradient(bottom, #a6b6c8, rgba(166, 182, 200, 0));
-}
- .splash .title {
- background: #a6b6c8;
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 100%;
- float: none;
- padding-bottom: 1.6875rem;
-}
- @media only screen and (min-width: 40.063em) {
- .splash {
- display: table;
- background: url("../images/plain-bg.jpg") no-repeat, #424b50 url("../images/bg.jpg") no-repeat right;
- background-size: auto 100%, auto;
- }
- .splash .image {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 29.16667%;
- float: none;
- display: table-cell;
- padding-bottom: 30%;
- background-size: auto 100%;
- }
- .splash .image:after {
- display: none;
- }
- .splash .title {
- padding: 5% 0;
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 70.83333%;
- float: none;
- display: table-cell;
- vertical-align: bottom;
- background: transparent;
- }
-}
- .toc {
- list-style: none;
- margin: 0;
- padding: 0;
-}
- .toc + h5 {
- margin-top: 1.6875rem;
- margin-bottom: 0;
- border-bottom: 1px solid #dddddd;
- padding-bottom: 1rem;
- color: #999999;
-}
- .toc > li {
- display: block;
- position: relative;
- border-top: 1px solid #dddddd;
-}
- .toc > li:first-child {
- border-top: 0;
-}
- .toc > li a {
- display: block;
- padding: 1rem 3.4rem 1rem 0;
-}
- .toc > li a h2 {
- margin: 0;
-}
- .toc > li a h2 small {
- display: block;
- text-transform: uppercase;
- line-height: 1.4;
-}
- .toc > li a:hover h2 {
- color: #8e44ad;
-}
- .toc > li i {
- position: absolute;
- right: 1rem;
- top: 1.4rem;
- background: white;
- width: 2rem;
- height: 2rem;
- padding: 0;
- border: 1px solid #dddddd;
- border-radius: 1000px;
- font-style: normal;
- content: '+';
- font-color: #6f6f6f;
- text-align: center;
- line-height: 1.8rem;
- cursor: pointer;
- transition: transform 0.3s, background 0.2s, opacity 0.3s;
-}
- .toc > li i:hover {
- background: #8e44ad;
- border-color: #703688;
- color: white;
-}
- .toc > li i.on {
- transform: rotate(45deg);
-}
- .toc .children {
- list-style: none;
- margin: 0 0 1.5rem 3.375rem;
- padding: 0;
-}
- .toc .children li {
- display: block;
-}
- .toc .children li a {
- display: block;
- padding: 0.55rem 0;
-}
- .toc .children li a h5 {
- margin: 0;
- text-transform: none;
- font-weight: 300;
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- font-style: italic;
- color: #9c9c9c;
-}
- .toc .children li a:hover h5 {
- color: #777777;
-}
- @media only screen and (min-width: 40.063em) {
- .toc + h5 {
- margin-top: 3.375rem;
- }
-}
- .toc-full {
- list-style: none;
- margin: 0 0 1.6875rem;
- padding: 0;
-}
- .toc-full + h5 {
- color: #6f6f6f;
-}
- .toc-full h2 {
- margin: 0;
-}
- .toc-full h5 {
- text-transform: none;
- font-weight: 300;
- font-style: italic;
- margin: 0;
-}
- .toc-full li {
- display: block;
- margin: 0;
-}
- .toc-full > li {
- margin: 0 0 0.84375rem;
-}
- .toc-full a {
- padding: 0.3rem 0;
-}
- .toc-full .children {
- list-style: none;
- margin: 0 0 0 1.6875rem;
- padding: 0;
-}
- .toc-full .children .children a {
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- color: #6f6f6f;
- line-height: 1;
-}
- .toc-full .children .children a:hover {
- color: #8e44ad;
-}
- .toc-full .children .children .children a {
- font-size: 80%;
- text-transform: uppercase;
-}
- .toc-full a {
- display: table-cell;
-}
- .toc-full a:hover {
- color: #8e44ad;
-}
- .toc-full a:hover h2, .toc-full a:hover h5 {
- color: #8e44ad;
-}
- @media only screen and (min-width: 40.063em) {
- .toc-full .children {
- margin: 0 0 0 2.25rem;
- }
-}
- .index-toc {
- /* column-count: 2;
- column-gap: $column-gutter/2;
- */
-}
- .index-toc ul {
- list-style: none;
- margin: 0 0 1.125rem;
- padding: 0;
-}
- .index-toc ul li {
- display: block;
-}
- .index-toc ul li a {
- display: block;
- padding: 0.3rem 0;
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- color: #444444;
- line-height: 1;
-}
- .index-toc ul li a:hover {
- color: #8e44ad;
-}
- .index-toc h4 {
- color: #6f6f6f;
- margin: 0 0 0.625rem;
-}
- @media only screen and (min-width: 40.063em) {
- .index-toc {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 33.33333%;
- float: left;
- }
-}
- .author {
- padding-top: 1.6875rem;
- padding-bottom: 1rem;
-}
- .author .author-image {
- padding-left: 0;
- padding-right: 0;
- width: 41.66667%;
- float: right;
- padding-left: 1.6875rem;
-}
- .author .author-meta h4 {
- margin: 0 0 0.625rem;
-}
- .author .author-meta p {
- font-size: 80%;
-}
- .author .author-meta p a {
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
-}
- @media only screen and (min-width: 40.063em) {
- .author {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 33.33333%;
- float: left;
- }
-}
- .extras {
- width: auto;
- margin-left: -1.6875rem;
- margin-right: -1.6875rem;
- margin-top: 0;
- margin-bottom: 0;
- max-width: none;
-}
- .extras:before, .extras:after {
- content: " ";
- display: table;
-}
- .extras:after {
- clear: both;
-}
- .extras a {
- display: block;
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 100%;
- float: none;
- padding: 1.6875rem;
-}
- .extras a h5 {
- margin: 0;
-}
- .extras a img {
- width: 50%;
- margin-bottom: 1rem;
-}
- .extras a:hover h5 {
- color: #8e44ad;
-}
- @media only screen and (min-width: 40.063em) {
- .extras a {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 33.33333%;
- float: left;
- padding: 1.6875rem;
- text-align: center;
- }
-}
- .question {
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- font-weight: 300;
- font-size: 1.5rem;
- line-height: 1.25;
-}
- .question:nth-child(n+2) {
- border-top: 1px solid #dddddd;
- padding-top: 1em;
- margin-top: 0;
-}
- .scroll-nav {
- margin-bottom: 3.375rem;
- margin-left: 10%;
-}
- .scroll-nav .scroll-nav__wrapper {
- width: 100%;
- margin: 0;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__list {
- list-style: none;
- margin: 0;
- padding: 0;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__list .scroll-nav__item {
- display: block;
- border-bottom: 1px solid #dddddd;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__list .scroll-nav__item .scroll-nav__link {
- display: table-cell;
- padding: 0.875rem 1rem;
- line-height: 1.2;
- color: dimgray;
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- transition: color 0.2s;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__list .scroll-nav__item .scroll-nav__link:hover {
- color: #222222;
-}
- @media only screen and (min-width: 90.063em) {
- .scroll-nav .scroll-nav__wrapper .scroll-nav__list .scroll-nav__item .scroll-nav__link {
- padding: 1rem 2rem;
- }
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__list .scroll-nav__item.is-parent-item .scroll-nav__link {
- padding-bottom: 0.4375rem;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__list .scroll-nav__item.active .scroll-nav__link {
- color: #f39c12;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__list .scroll-nav__item:last-child {
- border-bottom: 0;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__sub-list {
- list-style: none;
- margin: 0 0 0.4375rem 1rem;
- padding: 0;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__sub-list .scroll-nav__sub-item {
- display: block;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__sub-list .scroll-nav__sub-item .scroll-nav__sub-link {
- display: table-cell;
- font-size: 80%;
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- padding-left: 1em;
- padding-top: 0.5em;
- padding-bottom: 0.5em;
- line-height: 1.2;
- color: dimgray;
- transition: color 0.2s;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__sub-list .scroll-nav__sub-item .scroll-nav__sub-link:hover {
- color: #363636;
-}
- .scroll-nav .scroll-nav__wrapper .scroll-nav__sub-list .scroll-nav__sub-item.active .scroll-nav__sub-link {
- color: black;
-}
- section h3,
- section h4,
- section h5,
- section h6 {
- margin-top: 1.75rem;
-}
- section > h1 {
- border-bottom: 2px solid #222222;
- padding-bottom: 0.3em;
-}
- section a:hover {
- text-shadow: 0 2px white, -2px 2px white, 2px 2px white;
- border-bottom: 1px dotted #7a3a95;
-}
- section p strong, section p b {
- text-transform: lowercase;
- font-variant: small-caps;
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- font-weight: bold;
-}
- section section {
- margin-top: 2.53125rem;
- padding-top: 0;
- border-top: 0;
-}
- section h2 + section {
- margin-top: 1.6875rem;
- padding-top: 0;
- border-top: 0;
-}
-
- /* Notes & Warnings */
- section div[data-type=note] {
- background: #fdedd4;
- border: 1px solid #f39c12;
- }
- section div[data-type=warning] {
- background: #F2D7D5;
- border: 1px solid #F1948A;
- }
-
- section div[data-type=note],
- section div[data-type=warning] {
- border-radius: 3px;
- margin-bottom: 1.6875rem;
- padding: 1.6875rem;
- padding-top: 0;
-}
- section div[data-type=note] p {
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- font-weight: normal;
-}
- section div[data-type=note] div.highlight {
- padding: 0 1.6875rem;
-}
-
- section aside {
- margin-left: -1.6875rem;
- margin-right: -1.6875rem;
- margin-bottom: 1.6875rem;
- background: #fafafa;
- padding: 1.6875rem;
-}
- section aside h5:first-child {
- margin-top: 0;
-}
- section aside p {
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- font-weight: normal;
-}
- section div.highlight {
- font-size: 80%;
- margin-bottom: 1em;
-}
- section dl dt {
- margin: 0;
-}
- section dl dd {
- position: relative;
- padding-left: 1.6875rem;
-}
- section dl dd:before {
- content: '↪';
- position: absolute;
- left: 0.5rem;
- top: 0;
-}
- section ul {
- list-style: circle;
- margin-left: 1.6875rem;
- margin-bottom: 1.25rem;
-}
- section ol {
- margin-bottom: 1.25rem;
-}
- section ol li {
- margin-bottom: 1.25rem;
-}
- section table {
- margin-left: -0.875rem;
- width: 100%;
- margin-bottom: 1.25rem;
-}
- section table caption {
- padding: 0.5rem 0;
- border-bottom: 1px solid #dddddd;
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
- font-weight: 300;
- text-transform: uppercase;
-}
- section table th, section table td {
- padding: 0.5rem 0.875rem;
-}
- section table th {
- text-align: left;
- border-bottom: 1px solid #dddddd;
- font-family: "Open Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif;
-}
- section table tr:nth-child(even) td {
- background: #fafafa;
-}
- @media only screen and (min-width: 40.063em) {
- section section[data-type=sect1] {
- margin-top: 1.375rem;
- padding-top: 0;
- }
- section aside pre {
- margin-left: 0;
- margin-right: 0;
- }
- section dl dd {
- padding-left: 2.53125rem;
- }
-}
- .next-chapter {
- display: block;
- transition: background 0.2s;
-}
- .next-chapter .content {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 100%;
- float: none;
-}
- .next-chapter .content h1 {
- border-top: 1px solid #222222;
- padding: 1rem 0;
- margin: 0;
-}
- .next-chapter:hover {
- background: #8e44ad;
-}
- .next-chapter:hover .content h1 {
- border-color: #8e44ad;
- color: white;
-}
- .next-chapter:hover .content h1 small {
- color: #ba87d0;
-}
- @media only screen and (min-width: 64.063em) {
- .next-chapter .content {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 66.66667%;
- float: none;
- margin-left: 29.16667% !important;
- max-width: 50.625rem;
- }
- .next-chapter .content h1 {
- padding: 1.6875rem 0;
- }
-}
- @media only screen and (min-width: 90.063em) {
- .next-chapter .content {
- margin-left: 33.6875rem !important;
- }
-}
- footer {
- width: 100%;
- margin-left: auto;
- margin-right: auto;
- margin-top: 0;
- margin-bottom: 0;
- max-width: 573.75rem;
- background: #ecf0f1;
- padding: 1.6875rem 0;
- font-size: 80%;
-}
- footer:before, footer:after {
- content: " ";
- display: table;
-}
- footer:after {
- clear: both;
-}
- footer .content {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 100%;
- float: left;
- text-align: center;
-}
- footer ul {
- list-style: none;
- padding: 0;
- margin: 0;
-}
- footer ul li {
- display: inline-block;
-}
- footer ul li a {
- display: block;
- padding: 0;
- line-height: 1.4;
- margin: 0 1rem;
- border-bottom: 1px dotted transparent;
-}
- footer ul li a:hover {
- border-bottom: 1px dotted #7a3a95;
-}
- footer p {
- font-size: 80%;
- margin-top: 0.5rem;
- color: #6f6f6f;
-}
- @media only screen and (min-width: 40.063em) {
- footer {
- padding: 3.375rem 0;
- }
- footer .content {
- padding-left: 1.6875rem;
- padding-right: 1.6875rem;
- width: 75%;
- float: left;
- margin-left: auto;
- margin-right: auto;
- float: none;
- }
-}
-
- body:after{
- z-index:1000;
- content: "beta";
- position: fixed;
- width: 130px;
- height: 40px;
- background: #EE8E4A;
- top: 10px;
- left: -35px;
- text-align: center;
- font-size: 15px;
- font-family: sans-serif;
- text-transform: uppercase;
- font-weight: bold;
- color: #fff;
- line-height: 27px;
- -ms-transform:rotate(-45deg);
- -webkit-transform:rotate(-45deg);
- transform:rotate(-45deg);
- }
diff --git a/docs/css/prism.css b/docs/css/prism.css
deleted file mode 100644
index 2f7f941..0000000
--- a/docs/css/prism.css
+++ /dev/null
@@ -1,234 +0,0 @@
-/* PrismJS 1.13.0
-http://prismjs.com/download.html?#themes=prism&languages=markup+css+clike+javascript+bash+json+ocaml+scheme&plugins=toolbar+command-line+normalize-whitespace+show-language+copy-to-clipboard */
-/**
- * prism.js default theme for JavaScript, CSS and HTML
- * Based on dabblet (http://dabblet.com)
- * @author Lea Verou
- */
-
-code[class*="language-"],
-pre[class*="language-"] {
- color: black;
- background: none;
- text-shadow: 0 1px white;
- font-family: Consolas, Monaco, 'Andale Mono', 'Ubuntu Mono', monospace;
- text-align: left;
- white-space: pre;
- word-spacing: normal;
- word-break: normal;
- word-wrap: normal;
- line-height: 1.5;
-
- -moz-tab-size: 4;
- -o-tab-size: 4;
- tab-size: 4;
-
- -webkit-hyphens: none;
- -moz-hyphens: none;
- -ms-hyphens: none;
- hyphens: none;
-}
-
-pre[class*="language-"]::-moz-selection, pre[class*="language-"] ::-moz-selection,
-code[class*="language-"]::-moz-selection, code[class*="language-"] ::-moz-selection {
- text-shadow: none;
- background: #b3d4fc;
-}
-
-pre[class*="language-"]::selection, pre[class*="language-"] ::selection,
-code[class*="language-"]::selection, code[class*="language-"] ::selection {
- text-shadow: none;
- background: #b3d4fc;
-}
-
-@media print {
- code[class*="language-"],
- pre[class*="language-"] {
- text-shadow: none;
- }
-}
-
-/* Code blocks */
-pre[class*="language-"] {
- padding: 1em;
- margin: .5em 0;
- overflow: auto;
-}
-
-:not(pre) > code[class*="language-"],
-pre[class*="language-"] {
- background: #f5f2f0;
-}
-
-/* Inline code */
-:not(pre) > code[class*="language-"] {
- padding: .1em;
- border-radius: .3em;
- white-space: normal;
-}
-
-.token.comment,
-.token.prolog,
-.token.doctype,
-.token.cdata {
- color: slategray;
-}
-
-.token.punctuation {
- color: #999;
-}
-
-.namespace {
- opacity: .7;
-}
-
-.token.property,
-.token.tag,
-.token.boolean,
-.token.number,
-.token.constant,
-.token.symbol,
-.token.deleted {
- color: #905;
-}
-
-.token.selector,
-.token.attr-name,
-.token.string,
-.token.char,
-.token.builtin,
-.token.inserted {
- color: #690;
-}
-
-.token.operator,
-.token.entity,
-.token.url,
-.language-css .token.string,
-.style .token.string {
- color: #a67f59;
- background: hsla(0, 0%, 100%, .5);
-}
-
-.token.atrule,
-.token.attr-value,
-.token.keyword {
- color: #07a;
-}
-
-.token.function,
-.token.class-name {
- color: #DD4A68;
-}
-
-.token.regex,
-.token.important,
-.token.variable {
- color: #e90;
-}
-
-.token.important,
-.token.bold {
- font-weight: bold;
-}
-.token.italic {
- font-style: italic;
-}
-
-.token.entity {
- cursor: help;
-}
-
-div.code-toolbar {
- position: relative;
-}
-
-div.code-toolbar > .toolbar {
- position: absolute;
- top: .3em;
- right: .2em;
- transition: opacity 0.3s ease-in-out;
- opacity: 0;
-}
-
-div.code-toolbar:hover > .toolbar {
- opacity: 1;
-}
-
-div.code-toolbar > .toolbar .toolbar-item {
- display: inline-block;
-}
-
-div.code-toolbar > .toolbar a {
- cursor: pointer;
-}
-
-div.code-toolbar > .toolbar button {
- background: none;
- border: 0;
- color: inherit;
- font: inherit;
- line-height: normal;
- overflow: visible;
- padding: 0;
- -webkit-user-select: none; /* for button */
- -moz-user-select: none;
- -ms-user-select: none;
-}
-
-div.code-toolbar > .toolbar a,
-div.code-toolbar > .toolbar button,
-div.code-toolbar > .toolbar span {
- color: #bbb;
- font-size: .8em;
- padding: 0 .5em;
- background: #f5f2f0;
- background: rgba(224, 224, 224, 0.2);
- box-shadow: 0 2px 0 0 rgba(0,0,0,0.2);
- border-radius: .5em;
-}
-
-div.code-toolbar > .toolbar a:hover,
-div.code-toolbar > .toolbar a:focus,
-div.code-toolbar > .toolbar button:hover,
-div.code-toolbar > .toolbar button:focus,
-div.code-toolbar > .toolbar span:hover,
-div.code-toolbar > .toolbar span:focus {
- color: inherit;
- text-decoration: none;
-}
-
-.command-line-prompt {
- border-right: 1px solid #999;
- display: block;
- float: left;
- font-size: 100%;
- letter-spacing: -1px;
- margin-right: 1em;
- pointer-events: none;
-
- -webkit-user-select: none;
- -moz-user-select: none;
- -ms-user-select: none;
- user-select: none;
-}
-
-.command-line-prompt > span:before {
- color: #999;
- content: ' ';
- display: block;
- padding-right: 0.8em;
-}
-
-.command-line-prompt > span[data-user]:before {
- content: "[" attr(data-user) "@" attr(data-host) "] $";
-}
-
-.command-line-prompt > span[data-user="root"]:before {
- content: "[" attr(data-user) "@" attr(data-host) "] #";
-}
-
-.command-line-prompt > span[data-prompt]:before {
- content: attr(data-prompt);
-}
-
diff --git a/docs/dataframe.html b/docs/dataframe.html
deleted file mode 100644
index 4ca02d0..0000000
--- a/docs/dataframe.html
+++ /dev/null
@@ -1,373 +0,0 @@
-Dataframe for Tabular Data - Owl Online Tutorials
-Dataframe for Tabular Data
-Dataframe is a popular way to manipulate data. It originates from R’s dataframe and is widely implemented in many mainstream libraries such as Pandas. Essentially, a dataframe is simple container of the data that can be represented as a table.
-Different from the matrices in numerical computing, data stored in a dataframe are not necessarily numbers but a mixture of different types. The flexibility of dataframe largely comes from the dynamic typing inherently offered in a language. Due to OCaml’s static type checking, this poses greatest challenges to Owl when we were trying to introduce the similar functionality.
-It becomes an art when balancing between flexibility and efficiency in designing the programming interface. This article covers the design of Dataframe module and its basic usage.
-
-Basic Concepts
-The dataframe functionality is implemented in Owl’s Dataframe module. Owl views a dataframe as a collection of time series data, and each series corresponds to one column in the table. All series must have the same length and each has a unique column head. In the following, we use series and column interchangeably.
-Owl packs each series into a unified type called series and stores them in an array. As you can already see, dataframe is column-based so accessing columns is way more efficient than accessing rows. The Dataframe module only provides basic functionality to create, access, query, and iterate the data in a frame. We need to combine dataframe with the numerical functions in Stats module to reach its full capability. Essentially, Pandas is a bundle of table manipulation and basic statistical functions.
-
-
-Create Frames
-Dataframes can be created in various ways. Dataframe.make is the core function if we can to create a frame dynamically. For example, the following code creates a frame consisting of three columns include “name”, “age”, and “salary” of four people.
-
-
let name = Dataframe.pack_string_series [|"Alice"; "Bob"; "Carol"; "David"|]
- let age = Dataframe.pack_int_series [|20; 25; 30; 35|]
- let salary = Dataframe.pack_float_series [|2200.; 2100.; 2500.; 2800.|]
- let frame = Dataframe.make [|"name"; "age"; "salary"|] ~data:[|name; age; salary|]
-
If you run the code in utop, Owl can pretty print out the dataframe in the following format. If the frame grows too long or too wide, Owl is smart enough to truncate them automatically and present the table nicely in the toplevel.
-
-
Owl_pretty.pp_dataframe Format.std_formatter frame;;
-> +-----+---+------
-> name age salary
-> +-----+---+------
->R0 Alice 20 2200.
->R1 Bob 25 2100.
->R2 Carol 30 2500.
->R3 David 35 2800.
->- : unit = ()
-
-
In fact, you do not necessarily need to pass in the data when calling make function. You can make an empty frame by just passing in head names.
-
-
- let empty_frame = Dataframe.make [|"name"; "age"; "salary"|];;
-
-
Try the code, and you will see Owl prints out an empty table.
-
-
-Manipulate Frames
-There are a comprehensive set of table manipulation functions implemented in Dataframe module. We will go through them briefly in this section.
-Now that Owl allows us to create empty frames, it certainly provides functions to dynamically add new columns.
-
-
let job = Dataframe.pack_string_series [|"Engineer"; "Driver"; "Lecturer"; "Manager"|] in
- Dataframe.append_col frame job "job";;
-
- let gender = Dataframe.pack_string_series [|"female"; "male"; "female"; "male"|] in
- Dataframe.append_col frame gender "gender";;
-
- let location = Dataframe.pack_string_series [|"Cambridge, UK"; "Helsinki, FIN"; "London, UK"; "Prague, CZ"|] in
- Dataframe.append_col frame location "location";;
-
From the output, we can see that the “job” column has been appended to the end of the previously defined dataframe.
-
-
Owl_pretty.pp_dataframe Format.std_formatter frame;;
->
-> +-----+---+------+--------+------+-------------
-> name age salary job gender location
-> +-----+---+------+--------+------+-------------
->R0 Alice 20 2200. Engineer female Cambridge, UK
->R1 Bob 25 2100. Driver male Helsinki, FIN
->R2 Carol 30 2500. Lecturer female London, UK
->R3 David 35 2800. Manager male Prague, CZ
->- : unit = ()
-
-
We can even concatenate two dataframes. Depending on concatenating direction, there are a couple of things worth our attention:
-
-- when two dataframes are concatenated vertically, they must have the same number of columns and consistent column types; The head names of the first argument will be used in the new dataframe;
-- when two dataframes are concatenated horizontally, they must have the same number of rows; all the columns of two dataframes must have unique names.
-
-For example, the following code adds two new entries to the table by concatenating two dataframes vertically.
-
-
let name = Dataframe.pack_string_series [|"Erin"; "Frank"|];;
- let age = Dataframe.pack_int_series [|22; 24|];;
- let salary = Dataframe.pack_float_series [|3600.; 5500.;|];;
- let job = Dataframe.pack_string_series [|"Researcher"; "Consultant"|];;
- let gender = Dataframe.pack_string_series [|"male"; "male"|];;
- let location = Dataframe.pack_string_series [|"New York, US"; "Beijing, CN"|];;
- let frame_1 = Dataframe.make [|"name"; "age"; "salary"; "job"; "gender"; "location"|]
- ~data:[|name; age; salary; job; gender; location|];;
- let frame_2 = Dataframe.concat_vertical frame frame_1;;
-
The new dataframe looks like the following.
-
-
Owl_pretty.pp_dataframe Format.std_formatter frame_2;;
->
-> +-----+---+------+----------+------+-------------
-> name age salary job gender location
-> +-----+---+------+----------+------+-------------
->R0 Alice 20 2200. Engineer female Cambridge, UK
->R1 Bob 25 2100. Driver male Helsinki, FIN
->R2 Carol 30 2500. Lecturer female London, UK
->R3 David 35 2800. Manager male Prague, CZ
->R4 Erin 22 3600. Researcher male New York, US
->R5 Frank 24 5500. Consultant male Beijing, CN
->- : unit = ()
-
-
However, if you just want to append one or two rows, the previous method seems a bit overkill. Instead, you can call Dataframe.append_row function.
-
-
let new_row = Dataframe.([|
- pack_string "Erin";
- pack_int 22;
- pack_float 2300.;
- pack_string "Researcher";
- pack_string "male";
- pack_string "New York, US" |])
-in
-Dataframe.append_row frame new_row;;
->- : unit = ()
-
-
There are also functions allow you to retrieve the properties, for example:
-
-
- val copy : t -> t (* return the copy of a dataframe. *)
-
- val row_num : t -> int (* return the number of rows. *)
-
- val col_num : t -> int (* return the number of columns. *)
-
- val shape : t -> int * int (* return the shape of a dataframe. *)
-
- val numel : t -> int (* return the number of elements. *)
-
- ...
-
-
The module applies several optimisation techniques to accelerate the operations on dataframes. You can refer to the API reference for the complete function list.
-
-
-Query Frames
-We can use various functions in the module to retrieve the information from a dataframe. The basic get and set function treats the dataframe like a matrix. We need to specify the row and column index to retrieve the value of an element.
-
-
Dataframe.get frame 2 1;;
->- : Dataframe.elt = Owl.Dataframe.Int 30
-
-
The get_row and get_col (also get_col_by_name) are used to obtain a complete row or column. For multiple rows and columns, there are also corresponding get_rows and get_cols_by_name.
-Because each column has a name, we can also use head to retrieve information. However, we still need to pass in the row index because rows are not associated with names.
-
-
Dataframe.get_by_name frame 2 "salary";;
->- : Dataframe.elt = Owl.Dataframe.Float 2500.
-
-
We can use the head and tail functions to retrieve only the beginning or end of the dataframe. The results will be returned as a new dataframe. We can also use the more powerful functions like get_slice or get_slice_by_name if we are interested in the data within a dataframe. The slice definition used in these two functions is the same as that used in Owl’s Ndarray modules.
-
-
Dataframe.get_slice_by_name ([1;2], ["name"; "age"]) frame;;
->- : Dataframe.t =
->
-> +-----+---
-> name age
-> +-----+---
->R0 Bob 25
->R1 Carol 30
-
-
Iterate, Map, and Filter
-How can we miss the classic iteration functions in the functional programming? Dataframe includes the following methods to traverse the rows in a dataframe. We did not include any method to traverse columns because they can be simply extracted out as series then processed separately.
-
-
- val iteri_row : (int -> elt array -> unit) -> t -> unit
-
- val iter_row : (elt array -> unit) -> t -> unit
-
- val mapi_row : (int -> elt array -> elt array) -> t -> t
-
- val map_row : (elt array -> elt array) -> t -> t
-
- val filteri_row : (int -> elt array -> bool) -> t -> t
-
- val filter_row : (elt array -> bool) -> t -> t
-
- val filter_mapi_row : (int -> elt array -> elt array option) -> t -> t
-
- val filter_map_row : (elt array -> elt array option) -> t -> t
-
-
Applying these functions to a dataframe is rather straightforward. All the elements in a row are packed into elt type, it is a programmer’s responsibility to unpack them properly in the passed-in function.
-One interesting thing worth mentioning here is that there are several functions are associated with extended indexing operators. This allows us to write quite concise code in our application.
-
-
- val ( .%( ) ) : t -> int * string -> elt
- (* associated with `get_by_name` *)
-
- val ( .%( )<- ) : t -> int * string -> elt -> unit
- (* associated with `set_by_name` *)
-
- val ( .?( ) ) : t -> (elt array -> bool) -> t
- (* associated with `filter_row` *)
-
- val ( .?( )<- ) : t -> (elt array -> bool) -> (elt array -> elt array) -> t
- (* associated with `filter_map_row` *)
-
- val ( .$( ) ) : t -> int list * string list -> t
- (* associated with `get_slice_by_name` *)
-
-
Let’s present several examples to demonstrate how to use them. We can first pass in row index and head name tuple in %() to access cells.
-
-
- open Dataframe;;
-
- frame.%(1,"age");;
- (* return Bob's age. *)
-
- frame.%(2,"salary") <- pack_float 3000.;;
- (* change Carol's salary to 3000. *)
-
-
The operator .?() provides a shortcut to filter out the rows satisfying the passed-in predicate and returns the results in a new dataframe. For example, the following code filters out the people who are younger than 30.
-
-
frame.?(fun r -> unpack_int r.(1) < 30);;
->- : t =
->
-> +-----+---+------+----------+------+-------------
-> name age salary job gender location
-> +-----+---+------+----------+------+-------------
->R0 Alice 20 2200. Engineer female Cambridge, UK
->R1 Bob 25 2100. Driver male Helsinki, FIN
->R2 Erin 22 2300. Researcher male New York, US
-
-
The cool thing about .?() is that you can chain the filters up like below. The code first filters out the people younger than 30, then further filter out whose salary is higher than 2100.
-
-
- frame.?(fun r -> unpack_int r.(1) < 30)
- .?(fun r -> unpack_float r.(2) > 2100.);;
-
-
It is also possible to filter out some rows then make some modifications. For example, we want to filter out those people older than 25, then raise their salary by 5%. We can achieve this in two ways. First, we can use filter_map_row functions.
-
-
- let predicate x =
- let age = unpack_int x.(1) in
- if age > 25 then (
- let old_salary = unpack_float x.(2) in
- let new_salary = pack_float (old_salary *. 1.1) in
- x.(2) <- new_salary;
- Some x
- )
- else
- None
- ;;
-
- filter_map_row predicate frame;;
-
-
Alternatively, we can use the .?( )<- indexing operator. The difference is that we now need to define two functions - one (i.e. check function) for checking the predicate and one (i.e. modify function) for modifying the passed-in rows.
-
-
- let check x = unpack_int x.(1) > 25;;
-
- let modify x =
- let old_salary = unpack_float x.(2) in
- let new_salary = pack_float (old_salary *. 1.1) in
- x.(2) <- new_salary;
- x;;
-
- frame.?(check) <- modify;;
-
-
Running the code will give you the same result as that of calling filter_map_row function, but the way of structuring code becomes slightly different.
-Finally, you can also use $.() operator to replace get_slice_by_name function to retrieve a slice of dataframe.
-
-
frame.$([0;2], ["name"; "salary"]);;
->- : t =
->
-> +-----+------
-> name salary
-> +-----+------
->R0 Alice 2200.
->R1 Bob 2100.
->R2 Carol 3000.
-
-
Read/Write CSV Files
-CSV (Comma-Separated Values) is a common format to store tabular data. The module provides simple support to process CSV files. The two core functions are as follows.
-
-
- val of_csv : ?sep:char -> ?head:string array -> ?types:string array -> string -> t
-
- val to_csv : ?sep:char -> t -> string -> unit
-
-
of_csv function loads a CSV file into in-memory dataframe while to_csv writes a dataframe into CSV file on the disk. In both functions, we can use sep to specify the separator, the default separator is tab in Owl.
-For of_csv function, you can pass in the head names using head argument; otherwise the first row of the CSV file will be used as head. types argument is used to specify the type of each column in a CSV file. If types is dropped, all the column will be treated as string series by default. Note the length of both head and types must match the actual number of columns in the CSV file.
-The mapping between types string and actual OCaml type is shown below:
-
-b: boolean values;i: integer values;f: float values;s: string values;
-The following examples are in a gist that contains code and several example CSV files. The first example simply loads the funding.csv file into a dataframe, then pretty prints out the table.
-
-
let fname = "funding.csv" in
-let types = [|"s";"s";"f";"s";"s";"s";"s";"f";"s";"s"|] in
-let df = Dataframe.of_csv ~sep:',' ~types fname in
-Owl_pretty.pp_dataframe Format.std_formatter df
-
The result should look like this. We have truncated out some rows to save space here.
-
-
funding data in csv file
-
- +-----------------+-----------------+-------+---------+-------------+-----+----------+----------+--------------+------------
- permalink company numEmps category city state fundedDate raisedAmt raisedCurrency round
- +-----------------+-----------------+-------+---------+-------------+-----+----------+----------+--------------+------------
- R0 lifelock LifeLock nan web Tempe AZ 1-May-07 6850000. USD b
- R1 lifelock LifeLock nan web Tempe AZ 1-Oct-06 6000000. USD a
- R2 lifelock LifeLock nan web Tempe AZ 1-Jan-08 25000000. USD c
- R3 mycityfaces MyCityFaces 7. web Scottsdale AZ 1-Jan-08 50000. USD seed
- R4 flypaper Flypaper nan web Phoenix AZ 1-Feb-08 3000000. USD a
- R5 infusionsoft Infusionsoft 105. software Gilbert AZ 1-Oct-07 9000000. USD a
- ... ... ... ... ... ... ... ... ... ...
- R1450 cozi Cozi 26. software Seattle WA 1-Jun-08 8000000. USD c
- R1451 trusera Trusera 15. web Seattle WA 1-Jun-07 2000000. USD angel
- R1452 alerts-com Alerts.com nan web Bellevue WA 8-Jul-08 1200000. USD a
- R1453 myrio Myrio 75. software Bothell WA 1-Jan-01 20500000. USD unattributed
- R1454 grid-networks Grid Networks nan web Seattle WA 30-Oct-07 9500000. USD a
- R1455 grid-networks Grid Networks nan web Seattle WA 20-May-08 10500000. USD b
-
-
The second example is slightly more complicated. It loads estate.csv file then filters out the some rows with two predicates. You can see how the two predicates are chained up with .?() indexing operator.
-
-
open Dataframe
-
-let fname = "estate.csv" in
-let d = (of_csv ~sep:',' fname)
- .?(fun row -> unpack_string row.(7) = "Condo")
- .?(fun row -> unpack_string row.(4) = "2")
-in
-Owl_pretty.pp_dataframe Format.std_formatter d
-
For more examples, please refer to the gist dataframe.ml.
-
-
-Infer Type and Separator
-We want to devote a bit more text to CSV files. In the previous section, when we use of_csv function to load a CSV file, we explicitly pass in the separator and the types of all columns. However, both parameters are optional and can be skipped.
-Dataframe is able to automatically detect the correct separator and the type of each column. Of course, it is possible that the detection mechanism fails but such probability is fairly low in many cases. Technically, Dataframe first tries a set of predefined separators to see which one can correctly separate the columns, and then it tries a sequence of types to find out which one is able to correctly unpack the elements of a column.
-There are several technical things worth mentioning here:
-
-- to be efficient, Dataframe only takes maximum the first 100 lines in the CSV file for inference;
-- if there are missing values in a column of integer type, it falls back to float value because we can use
nan to represent missing values;
-- if the types have been decided based on the first 100 lines, any following lines containing the data of inconsistent type will be dropped.
-
-With this capability, it is much easier to load a CSV to quickly investigate what is inside.
-
-
open Dataframe
-
-let fname = "estate.csv" in
-let df = Dataframe.of_csv fname in
-Owl_pretty.pp_dataframe Format.std_formatter df
-
You can use the Dataframe.types function to retrieve the types of all columns in a dataframe.
-
-
-Summary
-This chapter introduces the dataframe module in Owl, including its creating, manipulation, query, loading and saving, etc. Comparing to those very mature libraries like Pandas, the Dataframe module in Owl is very young. We also try to keep its functionality minimal in the beginning to reserve enough space for future adjustment. The dataframe should only offer a minimal set of table manipulation functions, its analytical capability should come from the combination with other modules (e.g. Stats) in Owl.
-
-
- Next: Chapter 17Symbolic Representation
\ No newline at end of file
diff --git a/docs/diffequation.html b/docs/diffequation.html
deleted file mode 100644
index fd51132..0000000
--- a/docs/diffequation.html
+++ /dev/null
@@ -1,587 +0,0 @@
-Ordinary Differential Equations - Owl Online Tutorials
-Ordinary Differential Equations
-A differential equation is an equation that contains a function and one or more of its derivatives. It is studied ever since the invention of calculus, driven by the applications in mechanics, astronomy, and geometry. Currently it has become an important branch of mathematics study and its application is widely extended to biology, engineering, economics, and much more fields. In a differential equation, if the function and its derivatives are about only one variable, we call it an Ordinary Differential Equation (ODE). It is often used to model one-dimensional dynamical systems. Otherwise it is an Partial Differential Equation (PDE). In this chapter we focus on the ODE and introduce what is it, how it can be solved numerically, and the tools we provide to do that in Owl.
-
-What Is An ODE
-Generally, an ODE can be expressed as:
-\[ F(x, y^{'}, y^{''}, \ldots, y^{(n)}) = 0.\] {#eq:diffequation:ode-def}
-The differential equations model dynamic systems, and the initial status of the system is often known. That is called initial values. They can be represented as:
-\[y|_{x=x_0} = y_0, y^{'}|_{x=x_1} = y_1, \ldots ,\]{#eq:diffequation:init}
-where the \(y_0\), \(y_1\), etc. are known. The highest order of derivatives that are used in [@eq:diffequation:ode-def] is the order of this differential equation. A first-order differential equation can be generally expressed as: \(\frac{dy}{dx}=f(x,y)\), where \(f\) is any function that contains \(x\) and \(y\). Solving [@eq:diffequation:ode-def] that fits the given initial values as in [@eq:diffequation:init] is called the initial value problem. Solving problems of this kind is the main target of many numerical ODE solvers.
-
-Exact Solutions
-Solving a differential equation is often complex, but we do know how to solve part of them. Before looking at the computer solvers to a random ODEs, let’s turn to the math first and look at some ODE forms that we already have analytical close-form solution to.
-
-Examples of solutions to certain types of ODE {#tbl:diffequation:ode_solution}
-
-
-
-
-
-
-
-
-
-| \(P(y)\frac{dy}{dx} + Q(x) = 0\) |
-\(\int^{y}P(y)dy + \int^{x}Q(x)dx = C\) |
-
-
-| \(\frac{dy}{dx} + P(x)y = Q(x)\) |
-\(y=e^{-\sum_{x_0}^xP(x)dx}(y_0 + \sum_{x_0}^xQ(x)e^{\sum_{x_0}^xP(x)dx}dx)\) |
-
-
-
-The [@tbl:diffequation:ode_solution] shows two examples. The first line is a type of ODEs that are called the “separable equations”. The second line represents the ODEs that are called the “linear first-order equations”. The solutions to both form of ODE are already well-known, as shown in the second column. Here \(C\) is a constant decided by initial condition \(x_0\) and \(y_0\). \(P(x)\) and \(Q(x)\) are functions that contain only variable \(x\). Note that in both types the derivative \(dy/dx\) can be expressed explicitly as a function of \(x\) and \(y\), and therefore is called explicit ODE. Otherwise it is called an implicit ODE.
-High order ODEs can be reduced to the first order ones that contains only \(y'\), \(y\), and \(x\). For example, an ODE in the form \(y^{(n)} = f(x)\) can be reduced by multiple integrations one both sizes. If a two-order ODE is in the form \(y^{''} = f(x, y')\), let \(y' = g(x)\), and then \(y^{''} = p'(x)\). Put them into the original ODE, and it can be transformed as: \(p'=f(x,p)\). This is a first-order ODE that can be solved by normal solutions. Suppose we get \(y'=p=h(x, C_0)\); this explicit form of ODE can be integrated to get: \(y = \int~h(x, C_0)dx + C_1\).
-We have only scratched the surface of the ODE as traditional mathematics topic. This chapter does not aim to fully introduce how to solve ODEs analytically or simplify high-order ODEs. Please refer to classical calculus books or courses for more detail.
-
-
-Linear Systems
-ODEs are often used to describe various dynamic systems. In the previous examples there is only one function y that changes over time. However, a real world system often contains multiple interdependent components, and each can be described by a unique function that evolves over time. In the next of this chapter, we will talk about several ODE examples in detail, such as the two-body problem and the Lorenz attractor. For now, it suffices for us to look at [@eq:diffequation:twobody_system] and [@eq:diffequation:lorenz] in the sections below and see how they are different from the single-variant ODE so far. For example, the Lorenz attractor system has three components that change with time: the rate of convection in the atmospheric flow, the horizontal and vertical temperature variation.
-These two systems are examples of what is called the first-order linear system of ODE or just the linear system of ODE. Generally, if we have:
-\[\boldsymbol{y}(t) = \left[\begin{matrix}y_1(t) \\ \vdots \\ y_n(t) \end{matrix} \right],
-\boldsymbol{A}(t) = \left[\begin{matrix}a_{11}(t) & \ldots & a_{1n}(t) \\ \vdots & \ldots & \vdots \\ a_{n1}(t) & \ldots & a_{nn}(t) \end{matrix} \right],
-\textrm{and }
-\boldsymbol{g}(t) = \left[\begin{matrix}g_1(t) \\ \vdots \\ g_n(t) \end{matrix} \right],
-\]
-then a linear system can be expressed as:
-\[\boldsymbol{y'}(t) = \boldsymbol{A}(t)\boldsymbol{y}(t) + \boldsymbol{g}(t).\] {#eq:diffequation:linear-system}
-This linear system contains \(n\) time-dependent components: \(y_1(t), y_2(t), \ldots, y_n(t)\). As we will be shown soon, the first-order linear system is especially suitable for the numerical ODE solver to solve. Therefore, transforming a high-order single-component ODE into a linear system is sometimes necessary, as we will show in the two body problem example. But before we stride too far away, let’s get back to the ground and start with the basics of solving an ODE numerically.
-
-
-
-Solving An ODE Numerically
-This section introduces the basic idea of solving the initial value problem numerically. Let’s start with an example:
-\[y' = 2xy + x,\] {#eq:diffequation:example01}
-where the initial value is \(y(0) = 0\). Without going deep into the whole math calculation process (hint: it’s a separable first-order ODE), we give its analytical close-form solution:
-\[y = 0.5(e^{x^2} - 1).\] {#eq:diffequation:example01_solution}
-Now, pretending we don’t know the solution in [@eq:diffequation:example01_solution], we want to answer the question: what is \(y\)’s value when \(x = 1\) (or any other value)? How can we solve it numerically?
-Enter the Euler Method, a first-order numerical procedure to solve initial value problems. The basic idea is simple: according to [@eq:diffequation:example01], we know the derivative, i.e., the “slope” at any given point on the function curve. Besides, we also know the initial value \(x_0\) and \(y_0\) of this function. We can then simply move from the initial point to the target \(x\) value in small steps, and at every new point we adjust the direction according to derivative. Formally, the Euler method proposes to approximate the function \(y\) using a sequence of iterative steps:
-\[ y_{n+1} = y_n + \Delta~f(x_n, y_n),\]
-where \(\Delta\) is a certain step size. This method is really easy to be implemented in OCaml, as shown below.
-
-
let x = ref 0.
-let y = ref 0.
-let target = 1.
-let step = 0.001
-let f x y = 2. *. x *. y +. x
-
-let _ =
- while !x <= target do
- y := !y +. step *. (f !x !y);
- x := !x +. step
- done
-
In this case, we know that the analytical solution at \(x=1\) is \(0.5(e^{1^2} - 1)\):
-
-
(Owl_const.e -. 1.)/. 2.
->- : float = 0.859140914229522545
-
-
and the solution given by the previous numerical code is about 0.8591862, which is pretty close to the true answer.
-However, this method is as easy as it is unsuitable to be used in practical applications. One reason is that this method is not very accurate, despite that it works well in our example here. We will show this point soon. Also, it is not very stable, nor does it provide error estimate. Therefore, we can modify the Euler’s method to use a “midpoint” in stepping, hoping to curb the error in the update process:
-\[ s_1 = f(x_n, y_n),\] \[ s_2 = f(x_n + \Delta~/2, y_n + s_1~\Delta~/2),\] {#eq:diffequation:rk2} \[ y_{n+1} = y_n + \Delta~\frac{s_1 + s_2}{2}.\]
-This method is called the Midpoint Method, and we can also implement it in OCaml similarly. Let’s compare the performance of Euler and Midpoint in approximating the true result in [@eq:diffequation:example01_solution]:
-
-
let f x y = 2. *. x *. y +. x
-let f' x = 0.5 *. (Maths.exp (x *. x) -. 1.)
-
-let euler step target =
- let x = ref 0. in
- let y = ref 0. in
- while !x <= target do
- y := !y +. step *. (f !x !y);
- x := !x +. step
- done;
- !y
-
-let midpoint step target =
- let x = ref 0. in
- let y = ref 0. in
- while !x <= target do
- let s1 = f !x !y in
- let s2 = f (!x +. step /. 2.) (!y +. step /. 2. *. s1) in
- y := !y +. step *. (s1 +. s2) /. 2.;
- x := !x +. step
- done;
- !y
-
-let _ =
- let target = 2.6 in
- let h = Plot.create "plot_rk01.png" in
- Plot.(plot_fun ~h ~spec:[ RGB (66,133,244); LineStyle 1; LineWidth 2.; Marker "*" ] f' 2. target);
- Plot.(plot_fun ~h ~spec:[ RGB (219,68,55); LineStyle 2; LineWidth 2.; Marker "+" ] (euler 0.01) 2. target);
- Plot.(plot_fun ~h ~spec:[ RGB (219,68,55); LineStyle 2; LineWidth 2.; Marker "." ] (euler 0.001) 2. target);
- Plot.(plot_fun ~h ~spec:[ RGB (244,180,0); LineStyle 3; LineWidth 2.; Marker "+" ] (midpoint 0.01) 2. target);
- Plot.(plot_fun ~h ~spec:[ RGB (244,180,0); LineStyle 3; LineWidth 2.; Marker "." ] (midpoint 0.001) 2. target);
- Plot.(legend_on h ~position:NorthWest [|"Close-Form Solution"; "Euler (step = 0.01)";
- "Euler (step = 0.001)"; "Midpoint (step = 0.01)"; "Midpoint (step = 0.001)"|]);
- Plot.output h
-
Let’s see the result.
-
- Comparing the accuracy of Euler method and Midpoint method in approximating solution to ODE
-
-
Comparing the accuracy of Euler method and Midpoint method in approximating solution to ODE
-
-We can see that the choice of step size indeed matters to the precision. We use 0.01 and 0.001 for step size in the test, and for both cases the midpoint method outperforms the simple Euler method.
-Should we stop now? Do we find a perfect solution in midpoint method? Surely no. We can follow the existing trend and add more intermediate stages in the update sequence. For example, we can do this:
-\[ s_1 = f(x_n, y_n),\] \[ s_2 = f(x_n + \Delta~/2, y_n + s_1~\Delta~/2),\] \[ s_3 = f(x_n + \Delta~/2, y_n + s_2~\Delta~/2),\] {#eq:diffequation:rk4} \[ s_4 = f(x_n + \Delta, y_n + s_3~\Delta),\] \[ y_{n+1} = y_n + \Delta~\frac{s_1 + 2s_2+2s_3+s_4}{6}.\]
-Here in each iteration four intermediate steps are computed: once at the initial point, once at the end, and twice at the midpoints. This method is often more accurate than the midpoint method.
-We can keep going on like this, but hopefully you have seen the pattern so far. These seemingly mystical parameters are related to the term in Taylor series expansions. In the previous methods, e.g. Euler method, every time you update \(y_n\) to \(y_{n+1}\), an error is introduced into the approximation. The order of a method is the exponent of the smallest power of \(\Delta\) that cannot be matched. All these methods are called Runge-Kutta Methods. The basic idea is to remove the errors order by order, using the correct set of coefficients. A higher order of error indicates smaller error.
-The Euler is the most basic form of Runge-Kutta (RK) method, and the Midpoint is also called the second-order Runge-Kutta Method (rk2). What [@eq:diffequation:rk4] shows is a fourth-order Runge-Kutta method (rk4). It is the most frequently used RK method and works surprisingly well in many cases, and it is often a good choice especially when computing \(f\) is not expensive.
-However, as powerful as it may be, the classical rk4 is still a native implementation. A modern ODE solver, though largely follows the same idea, adds more “ingredients”. For example, the step size should be adaptively updated instead of being constant as in our example. Also, you may have seen solvers with names such as ode45 in MATLAB, and in their implementation, it means that this solver gets its error estimate at each step by comparing the 4th order solution and 5th order solution and then decides the direction.
-Besides, other methods also exist. For example, the Adams-Bashforth Method and Backward Differentiation Formula (BDF) are both multi-step methods that utilise not just the information such as derivative of the current step, but also of previous time steps to compute the solution at next step. In recent years, the Bulirsch-Stoer method is known to be both accurate and efficient computation-wise. Discussion of these advanced numerical methods and techniques are beyond the scope of this book. Please refer to [@press2007numerical] for more information.
-
-
-Owl-ODE
-Obviously, we cannot just rely on these manual solutions every time in practical use. It’s time to use some tools. Based on the computation functionalities and ndarray data structures in Owl, we provide the package “owl_ode” to perform the tasks of solving the initial value problems. Let’s start by seeing how the owl-ode package can be used to solve ODE problems.
-
-Example: Linear Oscillator System
-Here is a time independent linear dynamic system that contains two states:
-\[\frac{dy}{dt} = Ay, \textrm{where } A = \left[ \begin{matrix} 1 & -1 \\ 2 & -3 \end{matrix} \right].\] {#eq:diffequation:example_01}
-This equation represents an oscillator system. In this system, \(y\) is the state of the system, and \(t\) is time. The initial state at \(t=0\) is \(y_0 = \left[ -1, 1\right]^T\). Now we want to know the system state at \(t=2\). The function can be expressed in Owl using the matrix module.
-
-
let f y t =
- let a = [|[|1.; -1.|];[|2.; -3.|]|]|> Mat.of_arrays in
- Mat.(a *@ y)
-
Next, we want to specify the timespan of this problem: from 0 to 2, at a step of 0.001.
-
-
let tspec = Owl_ode.Types.(T1 {t0 = 0.; duration = 2.; dt=1E-3})
-
One last thing to solve the problem is the initial values:
-
-
let x0 = Mat.of_array [|-1.; 1.|] 2 1
-
And finally we can provide all these information to the rk4 solver in Owl_ode and get the answer:
-
-
let ts, ys = Owl_ode.Ode.odeint Owl_ode.Native.D.rk4 f x0 tspec ()
->val ts : Owl_dense_matrix_d.mat =
->
-> C0 C1 C2 C3 C4 C1996 C1997 C1998 C1999 C2000
->R0 0 0.001 0.002 0.003 0.004 ... 1.996 1.997 1.998 1.999 2
->
->val ys : Owl_dense_matrix_d.mat =
->
-> C0 C1 C2 C3 C4 C1996 C1997 C1998 C1999 C2000
->R0 -1 -1.002 -1.00399 -1.00599 -1.00798 ... -3.56302 -3.56451 -3.566 -3.56749 -3.56898
->R1 1 0.995005 0.990022 0.985049 0.980088 ... -2.07436 -2.07527 -2.07617 -2.07707 -2.07798
-
-
The rk4 solver is short for “forth-order Runge-Kutta Method” that we have introduced before. The result shows both the steps \(ts\) and the system values at each step \(ys\). We can visualise the oscillation according to the result:
-
- Visualise the solution of a simple linear system
-
-
-
-
Visualise the solution of a simple linear system
-
-
-
-Solver Structure
-Hope that you have gotten the gist of how to use Owl-ode. From these examples, we can see that the owl-ode abstracts the initial value problems as four different parts:
-
-- a function \(f\) to show how the system evolves in equation \(y'(t) = f(y, t)\);
-- a specification of the timespan;
-- system initial values;
-- and most importantly, a solver.
-
-If you look at the signature of a solver:
-
-
val rk4 : (module Types.Solver
- with type state = M.arr
- and type f = M.arr -> float -> M.arr
- and type step_output = M.arr * float
- and type solve_output = M.arr * M.arr)
-
it clearly indicates these different parts. Based on this uniform abstraction, you can choose a suitable solver and use it to solve many complex and practical ODE problems. Note that due to the difference of solvers, the requirement of different solver varies. Some requires the state to be two matrices, while others process data in a more general ndarray format.
-Owl-ode provides a wide range of solvers. It implements native solvers which are based on the step-by-step update basic idea we have discussed. Currently there are already many mature off-the-shelf tools for solving ODEs. We choose to interface to two of them: sundials and ODEPACK. Both methods are well implemented and widely used in practical use. For example, the SciPy provides a Python wrap of the sundials, and the NASA also uses its CVODE/CVODES solvers for spacecraft trajectory simulations.
-
-sundials: a SUite of Nonlinear and DIfferential/ALgebraic equation Solvers. It contains six solvers, and we interface to its CVODE solver for solving initial value problems for ordinary differential equation systems.
odepack: ODEPACK is a collection of FORTRAN solvers for the initial value problem for ordinary differential equation systems. We interface to its LSODA solver which is for solving the explicit form ODE.
-For all these solvers, owl-ode provides an easy-to-use unified interface, as you have seen in the examples. [@tbl:diffequation:solvers] is a table that lists all the solvers that are currently supported by owl-ode.
-
-Solvers provided by owl-ode and their types. {#tbl:diffequation:solvers}
-
-
-
-
-
-| Euler/Midpoint |
-Native |
-mat -> float -> mat |
-mat * mat |
- |
-
-
-rk4/rk23/rk45 |
-Native |
-mat -> float -> mat |
-mat * mat |
- |
-
-
-| Cvode/Cvode_stiff |
-Sundials |
-arr -> float -> arr |
-arr * arr |
- |
-
-
-| LSODA |
-ODEPACK |
-mat -> float -> mat |
-mat * mat |
- |
-
-
-
-The solvers share similar signature. The system evolve function takes state y and float time t as input, and the output is a tuple that contains two matrices or ndarrays that represent the time increment and the state of \(y\) at corresponding time step.
-In most of the cases, ode45 is a robust choice and the first solver to try. It is robust and has medium accuracy. If the problem has certain level of tolerance to accuracy, you can also try the other native solvers which are more efficient in computing. If the requirement for accuracy or stability is even higher, the Sundials/ODEPACK solvers can be used, especially when the ODEs to be solved are “stiff”. We will talk about the stiffness of ODEs in later section.
-
-
-Symplectic Solvers
-Besides what we have mentioned, owl-ode also implements the symplectic solvers, which are a bit different than the native solvers we have seen so far. Symplectic solvers are used to solve the Hamiltonian dynamics with much higher accuracy. We will show what it means with a example.
-Think about a dynamic orbiting system where the trajectory is exactly a circle. Such a circle can be generated by solving the linear system:
-\[y_0^{'} = y1; y_1^{'} = -y_0\] {#eq:diffequation:circle}
-This can also be expressed in the matrix form:
-\[y' = Ay, \textrm{where } A = \left[\begin{matrix} 0 & 1 \\ -1 & 0 \end{matrix} \right].\]
-We can then apply the previous methods such as Euler to solve it:
-
-
let f y t =
- let a = [|[|0.; 1.|];[|-1.; 0.|]|]|> Mat.of_arrays in
- Mat.(a *@ y)
-
-let x0 = Mat.of_array [|1.; 0.|] 2 1;;
-let tspec = Owl_ode.Types.(T1 {t0 = 0.; duration = 10.; dt=1E-2});;
-let ts, ys = Owl_ode.Ode.odeint Owl_ode.Native.D.euler f x0 tspec ()
-
The resulting trajectory by plotting the two components of the ys is show in [@fig:diffequation:plot_circle]. An exact solution would generate a perfect circle, but here we only get a spiral that is similar to a circle. (We have to admit that to better show this effect a large step size is used, but it still exists even using smaller step size.) Aside from improving the solver and precision, is there any other way to solve it better?
-
- Visualise the circle trajectory by solving linear system
-
-
Visualise the circle trajectory by solving linear system
-
-Look again at [@eq:diffequation:circle]. It shows an interesting pattern: it first uses the value of \(y_1\) to update the \(y_0^{'}\), and then uses \(y_0\) to update the value of \(y_1^{'}\). It belongs to a class of equations that are called the Hamiltonian systems which is often used in the classic mechanics. Such a system is represented by a set of coordinates \((p,q)\). The \(q_i\)’s are called the generalised coordinates, and \(q_i\)’s are corresponding conjugate momenta. The evolution of a Hamiltonian system is defined by the equations below:
-\[p' = \frac{\partial{H}}{\partial{q}}, q' = \frac{\partial{H}}{\partial{p}}.\]
-Here \(H(p, q)\) is a function of these two components. In the example above, \(p\) and \(q\) are just the two coordinates, and \(H(x,y) = (x^2 + y^2) / 2\). To solve this system, the symplectic solvers are widely used in different fields, since they conserve the value of \(H(p,q)\), to within the order of accuracy of the specific solver used. Most of the usual numerical solvers we have mentioned, such as the Euler and classical RK solvers, are not symplectic solvers.
-In Owl_ode we have implemented several symplectic solvers that are based on different integration algorithms: Sym_Euler, Leapfrog, PseudoLeapFrog, Ruth3, and Ruth4. Like the native solvers, they have different orders of error. These algorithms are implemented based on the same basic symplectic integration algorithm, with different parameters. If you are interested in more detail, please check the code and the paper [@candy1991symplectic] which our implementation is based on. Later we will show an example of using the symplectic solver to solve a damped harmony oscillation problem.
-
-
-Features and Limits
-One feature of owl-ode is the automatic inference of state dimensionality from initial state. For example, the native solvers takes matrix as state. Suppose the initial state of the system is a row vector of dimension \(1\times~N\). After \(T\) time steps, the states are stacked vertically, and thus have dimensions \(T\times~N\). If the initial state is a column vector of shape \(N\times~1\), then the stacked state after \(T\) time steps will be inferred as \(N\times~T\).
-The temporal integration of matrices, i.e. cases where the initial state is matrix instead of vector, is also supported. If the initial state is of shape \(N\times~M\), then the accumulated state stacks the flattened state vertically by time steps, which is of shape \(T\times(NM)\). The owl-ode provides a helper function Native.S.to_state_array to unpack the output state into an array of matrices.
-Another feature of owl-ode is that the users can easily define new solver module by creating a module of type Solver. For example, to create a custom Cvode solver that has a relative tolerance of 1E-7 as opposed to the default 1E-4, we can define and use the custom_cvode as follows:
-
-
let custom_cvode = Owl_ode_sundials.cvode ~stiff:false ~relative_tol:1E-7 ~abs_tol:1E-4
-let ts, xs = Owl_ode.Ode.odeint custom_cvode f x0 tspec ()
-
Here, we use the cvode function to construct a solver module Custom_Owl_Cvode. Similar helper functions like cvode have been also defined for native and symplectic solvers.
-We aim to make the owl-ode to run across different backends such as JavaScript. One way to do this is to use tools like js_of_ocaml to convert OCaml bytecode into JavaScript. However, this approach only supports pure OCaml implementation. The sundial and ODEPACK solvers are therefore excluded. Part of the library, the owl-ode-base contains implementations of solvers that are purely written in OCaml. These parts are therefore suitable to be used for in JavaScript and executed on web browsers. Another backend option is the Unikernl virtual machine such as MirageOS. We will talk about these backends in the “Compiler Backends” chapter in the Part II of this book.
-One limit of this library is that it is still in a development phase and thus a lot of features is not in place yet. For example, due to the lack of vector-valued root finding functions, we are currently limited to solving initial value problems of explicit ODEs.
-
-
-
-Examples of using Owl-ODE
-As with many good things in the world, mastering solving ODE requires practice. After getting to know owl-ode, in this section we will demonstrate more examples of using this tool.
-
-Explicit ODE
-Now that we have this powerful tool, we can use the solver in owl-ode to solve the motivative problem in [@eq:diffequation:example01] with simple code.
-
-
let f y t = Mat.((2. $* y *$ t) +$ t)
-
-let tspec = Owl_ode.Types.(T1 {t0 = 0.; duration = 1.; dt=1E-3})
-
-let y0 = Mat.zeros 1 1
-
-let solver = Owl_ode.Native.D.rk45 ~tol:1E-9 ~dtmax:10.0
-
-let _, ys = Owl_ode.Ode.odeint solver f y0 tspec ()
-
The code is mostly similar to previous example, the only difference is that we can now try another solver provided: the rk45 solver, with certain parameters specified. You don’t have to worry about what the tol or dtmax means for now. Note that this solver (and the previous one) requires input to be of type mat in Owl, and the function \(f\) be of type mat -> float -> mat. The result is shown below. You can verify the result with [@eq:diffequation:example01_solution], by setting the \(x\) to 1 in this equation, and the numerical value of \(y\) will be close to 0.859079.
-
-
Mat.transpose ys
->- : Mat.mat =
->
-> C0 C1 C2 C3 C4 C124 C125 C126 C127 C128
->R0 0 7.62941E-06 9.91919E-05 0.000251833 0.00046561 ... 0.777984 0.797555 0.817586 0.83809 0.859079
-
-
Two Body Problem
-In classical mechanics, the two-body problem is to predict the motion of two massive objects. It is assumed that the only force that is considered comes from each other, and both objects are not affected by any other object. This problem can be seen in the astrodynamics where the objects of interests are planets, satellites, etc. under the influence of only gravitation. Another case is the trajectory of electron around Atomic nucleus in a atom.
-This classic problem is one of the earliest investigated mechanics problems, and was long solved from the age of Newton. It is also a typical integrable problem in classical mechanics. In this example, let’s consider a simplified version of this problem. We assume that the two objects interact on a 2-dimensional plane, and one of them is so much more massive than the other one that it can be thought of as being static (think about electron and nucleus) and sits at the zero point of a Cartesian coordinate system (0, 0) in the plane. In this system, let’s consider the trajectory of the lighter object. This “one-body” problem is basis of the two body problem. For many forces, including gravitational ones, a two-body problem can be divided into a pair of one-body problems.
-Given the previous assumption and newton’s equation, it can be proved that the location of the lighter object [\(y_0\), \(y_1\)] with regard to time \(t\) can be described by:
-\[y_0^{''}(t) = -\frac{y_0}{r^3},\] \[y_1^{''}(t) = -\frac{y_1}{r^3},\] {#eq:diffequation:twobody}
-where \(r=\sqrt{y_0^2 + y_1^2}\). This is a second-order ODE system, and to make it solvable using our tool, we need to make it into a first-order explicit ordinary differential equation system:
-\[y_0^{'} = y_2,\] \[y_1^{'} = y_3,\] \[y_2^{'} = -\frac{y_0}{r^3},\] {#eq:diffequation:twobody_system} \[y_3^{'} = -\frac{y_1}{r^3},\]
-Based on [@eq:diffequation:twobody_system], we can build up our code as below:
-
-
let f y _t =
- let y = Mat.to_array y in
- let r = Maths.(sqrt ((sqr y.(0)) +. (sqr y.(1)))) in
- let y0' = y.(2) in
- let y1' = y.(3) in
- let y2' = -.y.(0) /. (Maths.pow r 3.) in
- let y3' = -.y.(1) /. (Maths.pow r 3.) in
- [| [|y0'; y1'; y2'; y3'|] |] |> Mat.of_arrays
-
-let y0 = Mat.of_array [|-1.; 0.; 0.5; 0.5|] 1 4
-let tspec = Owl_ode.Types.(T1 {t0 = 0.; duration = 20.; dt=1E-2})
-let custom_solver = Native.D.rk45 ~tol:1E-9 ~dtmax:10.0
-
Here the y0 provides initial status of the system: first two numbers denote the initial location of object, and the next two numbers indicate the initial momentum of this object. After building the function, initial status, timespan, and solver, we can then solve the system and visualise it.
-
-
let plot () =
- let ts, ys = Ode.odeint custom_solver f y0 tspec () in
- let h = Plot.create "two_body.png" in
- let open Plot in
- plot ~h ~spec:[ RGB (66, 133, 244); LineStyle 1 ] (Mat.col ys 0) (Mat.col ys 1);
- scatter ~h ~spec:[ Marker "#[0x229a]"; MarkerSize 5. ] (Mat.zeros 1 1) (Mat.zeros 1 1);
- text ~h ~spec:[ RGB (51,51,51)] (-.0.3) 0. "Massive Object";
- output h
-
 The trajectory of lighter object orbiting the massive object in a simplified two-body problem
-
-
The trajectory of lighter object orbiting the massive object in a simplified two-body problem
-
-One example of this simplified two-body problem is the “planet-sun” system where a planet orbits the sun. Kepler’s law states that in this system the planet goes around the sun in an ellipse shape, with the sun at a focus of the ellipse. The orbiting trajectory in the result visually follows this theory.
-
-
-Lorenz Attractor
-Lorenz equations are one of the most thoroughly studied ODEs. This system of ODEs is proposed by Edward Lorenz in 1963 to model the flow of fluid (the air in particular) from hot area to cold area. Lorenz simplified the numerous atmosphere factors into the simple equations below.
-\[x'(t) = \sigma~(y(t)- x(t))\] \[y'(t) = x(t)(\rho - z(t)) - y(t)\] {#eq:diffequation:lorenz} \[z'(t) = x(t)y(t) - \beta~z(t)\]
-Here \(x\) is proportional to the rate of convection in the atmospheric flow; \(y\) and \(z\) are proportional to the horizontal and vertical temperature variation. Parameter \(\sigma\) is the Prandtl number, and \(\rho\) is the normalised Rayleigh number. \(\beta\) is related to the geometry of the domain. The most commonly used parameter values are: \(\sigma = 10, \rho=20\), and \(\beta = \frac{8}{3}\). Based on this information, we can use owl-ode to express the Lorenz equations with code.
-
-
let sigma = 10.
-let beta = 8. /. 3.
-let rho = 28.
-
-let f y _t =
- let y = Mat.to_array y in
- let y0' = sigma *. (y.(1) -. y.(0)) in
- let y1' = y.(0) *. (rho -. y.(2)) -. y.(1) in
- let y2' = y.(0) *. y.(1) -. beta *. y.(2) in
- [| [|y0'; y1'; y2'|] |] |> Mat.of_arrays
-
We set the initial values of the system to -1, -1, and 1 respectively. The simulation timespan is set to 30 seconds, and the rk45 solver is used.
-
-
let y0 = Mat.of_array [|-1.; -1.; 1.|] 1 3
-let tspec = Owl_ode.Types.(T1 {t0 = 0.; duration = 30.; dt=1E-2})
-let custom_solver = Native.D.rk45 ~tol:1E-9 ~dtmax:10.0
-
Now, we can solve the ODEs system and visualise the results. In the plots, we first show how the value of \(x\), \(y\) and \(z\) changes with time; next we show the phase plane plots between each two of them.
-
-
let _ =
- let ts, ys = Ode.odeint custom_solver f y0 tspec () in
- let h = Plot.create ~m:2 ~n:2 "lorenz_01.png" in
- let open Plot in
- subplot h 0 0;
- set_xlabel h "time";
- set_ylabel h "value on three axes";
- plot ~h ~spec:[ RGB (66, 133, 244); LineStyle 1 ] ts (Mat.col ys 2);
- plot ~h ~spec:[ RGB (219, 68, 55); LineStyle 1 ] ts (Mat.col ys 1);
- plot ~h ~spec:[ RGB (244, 180, 0); LineStyle 1 ] ts (Mat.col ys 0);
- subplot h 0 1;
- set_xlabel h "x-axis";
- set_ylabel h "y-axis";
- plot ~h ~spec:[ RGB (66, 133, 244) ] (Mat.col ys 0) (Mat.col ys 1);
- subplot h 1 0;
- set_xlabel h "y-axis";
- set_ylabel h "z-axis";
- plot ~h ~spec:[ RGB (66, 133, 244) ] (Mat.col ys 1) (Mat.col ys 2);
- subplot h 1 1;
- set_xlabel h "x-axis";
- set_ylabel h "z-axis";
- plot ~h ~spec:[ RGB (66, 133, 244) ] (Mat.col ys 0) (Mat.col ys 2);
- output h
-
 Three components and phase plane plots of Lorenz attractor
-
-
Three components and phase plane plots of Lorenz attractor
-
-From [@fig:diffequation:lorenz_01], we can imagine that the status of system keep going towards two “voids” in a three dimensional space, jumping from one to the other. These two voids are a certain type of attractors in this dynamic system, where a system tends to evolve towards.
-Now, about Lorenz equation, there is an interesting question: “what would happen if I change the initial value slightly?” For some systems, such as a pendulum, that wouldn’t make much a difference, but not here. We can see that clearly with a simple experiment. Keeping function and timespan the same, let’s change only 0.1% of initial value and then solve the system again.
-
-
let y00 = Mat.of_array [|-1.; -1.; 1.|] 1 3
-let y01 = Mat.of_array [|-1.001; -1.001; 1.001|] 1 3
-let ts0, ys0 = Ode.odeint custom_solver f y00 tspec ()
-let ts1, ys1 = Ode.odeint custom_solver f y01 tspec ()
-
To make later calculation easier, we can set the two resulting matrices to be of the same shape using slicing.
-
-
let r0, c0 = Mat.shape ys0
-let r1, c1 = Mat.shape ys1
-let r = if (r0 < r1) then r0 else r1
-let ts = if (r0 < r1) then ts0 else ts1
-let ys0 = Mat.get_slice [[0; r-1]; []] ys0
-let ys1 = Mat.get_slice [[0; r-1]; []] ys1
-
Now, we can compare the Euclidean distance between the status of these two systems at certain time. Also, we show the value change of the three components after changing initial values along the time axis.
-
-
let _ =
- let h = Plot.create ~m:1 ~n:2 "lorenz_02.png" in
- let open Plot in
- subplot h 0 0;
- set_xlabel h "time";
- set_ylabel h "value on three axes";
- plot ~h ~spec:[ RGB (244, 180, 0); LineStyle 1 ] ts (Mat.col ys1 0);
- plot ~h ~spec:[ RGB (219, 68, 55); LineStyle 1 ] ts (Mat.col ys1 1);
- plot ~h ~spec:[ RGB (66, 133, 244); LineStyle 1 ] ts (Mat.col ys1 2);
- subplot h 0 1;
- let diff = Mat.(
- sqr ((col ys0 0) - (col ys1 0)) +
- sqr ((col ys0 1) - (col ys1 1)) +
- sqr ((col ys0 2) - (col ys1 2))
- |> sqrt
- )
- in
- plot ~h ~spec:[ RGB (66, 133, 244); LineStyle 1 ] ts diff;
- set_xlabel h "time";
- set_ylabel h "distance of two systems";
- output h
-
 Change the initial states on three dimension by only 0.1%, and the value of Lorenz system changes visibly.
-
-
Change the initial states on three dimension by only 0.1%, and the value of Lorenz system changes visibly.
-
-According to [@fig:diffequation:lorenz_02], the first figure shows that, initially the systems looks quite like that in [@fig:diffequation:lorenz_01], but after about 15 seconds, the system state begins to change. This change is then quantified using the Euclidean distance between these two systems. Clearly the difference two system changes sharply after a certain period of time, with no sign of converge. You can try to extend the timespan longer, and the conclusion will still hold.
-This result shows that, in the Lorenz system, even a tiny bit of change of the initial state can lead to a large and chaotic change of future state after a while. It partly explains why weather prediction is difficult to do: you can only accurately predict the weather for a certain period of time, any day longer and the weather will be extremely sensitive to a tiny bit of perturbations at the beginning, such as, well, such as the flapping of the wings of a distant butterfly several weeks earlier. You are right, the Lorenz equation is closely related to the idea we now call “butterfly effect” in the pop culture.
-
-
-Damped Oscillation
-This oscillation system appears frequently in Physics and several other fields: charge flow in electric circuit, sound wave, light wave, etc. These phenomena all follow the similar pattern of ODEs. One example is the mass attached on a spring. The system is placed vertically. First the spring stretches to balance the gravity; once the system reaches equilibrium, we can then study the upward displacement of the mass from its original position, denoted with \(x\). One the mass is in motion, at any place \(x\), the pulling force on the mass is proportional to displacement \(x\): \(F=-kx\). Here \(k\) is a positive parameter.
-This system is called simple harmonic oscillator, which represents an ideal case where \(F\) is the only force acting on the mass. However, in a real harmonic oscillation system, there is also the frictional force. Such system is called damped oscillation. The frictional force is proportional to the velocity of the mass. Therefore the total force can be expressed as \(F = -kx-cv\). Here \(c\) is the damping coefficient factor. Since both the force and velocity can be expressed as derivatives of \(x\) on time, we have:
-\[m\frac{dx}{dt^2} = -kx - c\frac{dx}{dt}\] {#eq:diffequation:damped_osc}
-Here \(m\) represents the mass of the object. Recall from the previous section that the state of the system in a symplectic solver is a tuple of two matrices, representing the position and momentum coordinates of the system. Therefore, we can express the oscillation equation with a function from this system.
-
-
let a = 1.0
-let damped_noforcing a (xs, ps) _t : Owl.Mat.mat =
- Owl.Mat.((xs *$ -1.0) + (ps *$ (-1.0 *. a)))
-
The system evolve function takes the two matrices, position and momentum, and the float number time t as input states. For simplicity, we assume the coefficients are all the same and can be set to one. Let’s then solve with the symplectic solver; we can use the LeapFrog, ruth3, and Symplectic_Euler to compare how their solutions differ.
-
-
let main () =
- let x0 = Owl.Mat.of_array [| -0.25 |] 1 1 in
- let p0 = Owl.Mat.of_array [| 0.75 |] 1 1 in
- let t0, duration = 0.0, 15.0 in
- let f = damped_noforcing a in
- let tspec = T1 { t0; duration; dt=0.1 } in
- let t, sol1, _ = Ode.odeint (module Symplectic.D.Leapfrog) f (x0, p0) tspec () in
- let _, sol2, _ = Ode.odeint Symplectic.D.ruth3 f (x0, p0) tspec () in
- let _, sol3, _ =
- Ode.odeint (module Symplectic.D.Symplectic_Euler) f (x0, p0) tspec ()
- in
- t, sol1, sol2, sol3
-
You should be familiar with this code by now. It defines the initial values, the time duration, time step, and then provides this information to the solvers. Unlike native solvers, these symplectic solvers return three values instead of two: the first is the time sequence, and the next two sequences indicate how the \(x\) and \(p\) values evolve at each time point.
-
-
let plot_sol fname t sol1 sol2 sol3 =
- let h = Plot.create fname in
- let open Plot in
- plot ~h ~spec:[ RGB (0, 0, 255); LineStyle 1 ] t (Mat.col sol1 0);
- plot ~h ~spec:[ RGB (0, 255, 0); LineStyle 1 ] t (Mat.col sol2 0);
- plot ~h ~spec:[ RGB (255, 0, 0); LineStyle 1 ] t (Mat.col sol3 0);
- set_xlabel h "time";
- set_ylabel h "x";
- legend_on h ~position:NorthEast [| "Leapfrog"; "Ruth3"; "Symplectic Euler" |];
- output h
-
Here we only plot the change of position \(x\) over time in the oscillation, and plot the solution provided by the three different solvers, as shown in the plotting code above. You can also try to visualise the change to the momentum \(p\) in a similar way. The result is shown in [@fig:diffequation:damped]. You can clearly see that the displacement decreases towards equilibrium position in this damped oscillation as the energy dissipating. The curves provided by three solvers are a bit different, especially at the peak of the curve, but keep close enough for most of the time.
-
- Step response of a damped harmonic oscillator
-
-
-
-
-
Step response of a damped harmonic oscillator
-
-
-
-
-Stiffness
-Stiffness is an important concept in the numerical solution of ODE. Think about a function that has a “cliff” where at a point its nearby value changes rapidly. To find the solution with normal method as we have used, it may requires such an extremely small stepping size that traversing the whole timespan may takes a very long time and lot of computation. Therefore, the solver of stiff equations needs to use different methods such as implicit differencing or automatic step size adjustment etc. to keep it accurate and robust.
-The Van der Pol equation is a good example to show both non-stiff and stiff cases. In dynamics, the Van der Pol oscillator is a non-conservative oscillator with non-linear damping. Its behaviour with time can be described with a high order ODE:
-\[y^{''} - \mu~(1-y^2)y' + y = 0,\] {#eq:diffequation:vanderpol_0}
-where \(\mu\) is a scalar parameter indicating the non-linearity and the strength of the damping. To make it solvable using our tool, we can change it into a pair of explicit one-order ODEs in a linear system:
-\[y_0^{'} = y_1,\] \[y_1^{'} = \mu~(1-y_0^2)y_1 - y_0.\] {#eq:diffequation:vanderpol_1}
-As we will show shortly, by varying the damping parameter, this group of equations can be either non-still or stiff.
-We provide both stiff (Owl_Cvode_Stiff) and non-still (Owl_Cvode) solvers by interfacing to Sundials, and the LSODA solver of ODEPACK can automatically switch between stiff and non-stiff algorithms. We will try both in the example. We start with the basic function definition code that are shared by both cases:
-
-
open Owl_ode
-open Owl_ode.Types
-open Owl_plplot
-
-let van_der_pol mu =
- fun y _t ->
- let y = Mat.to_array y in
- [| [| y.(1); mu *. (1. -. Maths.sqr y.(0)) *. y.(1) -.y.(0) |] |]
- |> Mat.of_arrays
-
Solve Non-Stiff ODEs
-When set the parameter to 1, the equation is a normal non-stiff one, and let’s try to use the Cvode solver from sundials to do this job.
-
-
let f_non_stiff = van_der_pol 1.
-
-let y0 = Mat.of_array [| 0.02; 0.03 |] 1 2
-
-let tspec = T1 { t0 = 0.0; dt = 0.01; duration = 30.0 }
-
-let ts, ys = Ode.odeint (module Owl_ode_sundials.Owl_Cvode) f_stiff y0 tspec ()
-
Everything seems normal. To see the “non-stiffness” clearly, we can plot how the two system states change over time, and a phase plane plot of their trajectory on the plane, using the two states as x- and y-axis values. The result is shown in [@fig:diffequation:nonstiff].
-
-
let () =
- let fname = "vdp_sundials_nonstiff.png" in
- let h = Plot.create ~n:2 ~m:1 fname in
- let open Plot in
- set_foreground_color h 0 0 0;
- set_background_color h 255 255 255;
- subplot h 0 0;
- plot ~h ~spec:[ RGB (0, 0, 255); LineStyle 1 ] (Mat.col ys 0) (Mat.col ys 1);
- subplot h 0 1;
- plot ~h ~spec:[ RGB (0, 0, 255); LineStyle 1 ] ts Mat.(col ys 1);
- plot ~h ~spec:[ RGB (0, 0, 255); LineStyle 3 ] ts Mat.(col ys 0);
- output h
-
-
 Solving Non-Stiff Van der Pol equations with Sundial CVode solver
-
-
-
-
Solving Non-Stiff Van der Pol equations with Sundial CVode solver
-
-
-
-Solve Stiff ODEs
-Change the parameters to 1000, and now this function becomes stiff. We follow the same procedure as before, but now we use the Lsoda solver from odepack, and the timespan is extended to 3000. From [@fig:diffequation:stiff] we can see clearly what “stiff” means. Both lines in this figure contain very sharp “cliffs”.
-
-
let f_stiff = van_der_pol 1000.
-let y0 = Mat.of_array [| 2.; 0. |] 1 2
-let tspec = T1 { t0 = 0.0; dt = 0.01; duration = 3000.0 }
-
-let () =
- let ts, ys = Ode.odeint (module Owl_ode_odepack.Lsoda) f_stiff y0 tspec () in
- let fname = "vdp_odepack_stiff.png" in
- let h = Plot.create fname in
- let open Plot in
- set_foreground_color h 0 0 0;
- set_background_color h 255 255 255;
- set_yrange h (-2.) 2.;
- plot ~h ~spec:[ RGB (0, 0, 255); LineStyle 1 ] ts Mat.(col ys 1);
- plot ~h ~spec:[ RGB (0, 0, 255); LineStyle 3 ] ts Mat.(col ys 0);
- output h
-
-
 Solving Stiff Van der Pol equations with ODEPACK LSODA solver.
-
-
-
-
-
Solving Stiff Van der Pol equations with ODEPACK LSODA solver.
-
-
-
-
-Summary
-This chapter discusses solving the initial value problem of ordinary differential equations (ODEs) numerically. We first present the general definition of the ODE and the initial value problem. There are already many existing mathematical solution to ODEs of certain format, but that is not the focus of this chapter. This chapter is centred on the owl-ode library. It implements several native and symplectic solvers. We have briefly explained the basic idea of these methods. Also, this library interfaces to existing off-the-shelf open source ODE solvers from the Sundials and ODEPACK library. Next, we demonstrate how these solvers are used to solve ODE from several real examples, including the Two-body problem, the Lorentz Attractor, and Damped Oscillation, etc. Finally, we introduce one important idea in the solving ODE numerically: stiffness, and then shows how we can solve stiff and non-stiff ODEs with the example of the van der pol equation. Hopefully, after studying this chapter, the readers can have a basic idea of how numerical ODE solver works and how to apply them into solving real-world problems.
-
-
-
- Next: Chapter 10Signal Processing
\ No newline at end of file
diff --git a/docs/distributed.html b/docs/distributed.html
deleted file mode 100644
index 82f2d84..0000000
--- a/docs/distributed.html
+++ /dev/null
@@ -1,402 +0,0 @@
-Distributed Computing - Owl Online Tutorials
-Distributed Computing
-Background: decentralised computation
-In this chapter, we will cover two topics:
-
-- Actor Engine
-- Barrier control, especially PSP
-
-Refer to [@wang2017probabilistic] for more detail.
-
-Actor System
-Introduction: Distributed computing engines etc.
-
-Design
-(TODO: the design of actor’s functor stack; how network/barrier etc. are implemented as separated as different module. Connection with Mirage etc.)
-
-
-Actor Engines
-A key choice when designing systems for decentralised machine learning is the organisation of compute nodes. In the simplest case, models are trained in a centralised fashion on a single node leading to use of hardware accelerators such as GPUs and the TPU. For reasons indicated above, such as privacy and latency, decentralised machine learning is becoming more popular where data and model are spread across multiple compute nodes. Nodes compute over the data they hold, iteratively producing model updates for incorporation into the model, which is subsequently disseminated to all nodes. These compute nodes can be organised in various ways.
-The Actor system has implemented core APIs in both map-reduce engine and parameter sever engine. Both map-reduce and parameter server engines need a (logical) centralised entity to coordinate all the nodes’ progress. To demonstrate PSP’s capability to transform an existing barrier control method into its fully distributed version, we also extended the parameter server engine to peer-to-peer (p2p) engine. The p2p engine can be used to implement both data and model parallel applications, both data and model parameters can be (although not necessarily) divided into multiple parts then distributed over different nodes.
-Each engine has its own set of APIs. E.g., map-reduce engine includes map, reduce, join, collect, etc.; whilst the peer-to-peer engine provides four major APIs: push, pull, schedule, barrier. It is worth noting there is one function shared by all the engines, i.e. barrier function which implements various barrier control mechanisms.
-Next we will introduce these three different kinds of engines of Actor.
-
-
-Map-Reduce Engine
-Following MapReduce [@dean2008mapreduce] programming model, nodes can be divided by tasks: either map or reduce. A map function processes a key/value pair to generate a set of intermediate key/value pairs, and a reduce function aggregates all the intermediate key/value paris with the same key. Execution of this model can automatically be paralleled. Mappers compute in parallel while reducers receive the output from all mappers and combine to produce the accumulated result. This parameter update is then broadcast to all nodes. Details such as distributed scheduling, data divide, and communication in the cluster are mostly transparent to the programmers so that they can focus on the logic of mappers and reducers in solving a problem within a large distributed system.
-We can use a simple example to demonstrate this point. (with illustration, not code)
-This simple functional style can be applied to a surprisingly wide range of applications.
-Interfaces in Actor:
-
-
val map : ('a -> 'b) -> string -> string
-
-val reduce : ('a -> 'a -> 'a) -> string -> 'a option
-
-val fold : ('a -> 'b -> 'a) -> 'a -> string -> 'a
-
-val filter : ('a -> bool) -> string -> string
-
-val shuffle : string -> string
-
-val union : string -> string -> string
-
-val join : string -> string -> string
-
-val collect : string -> 'a list
-
Example of using Map-Reduce in Actor: we use the classic wordcount example.
-
-
module Ctx = Actor.Mapre
-
-let print_result x = List.iter (fun (k,v) -> Printf.printf "%s : %i\n" k v) x
-
-let stop_words = ["a";"are";"is";"in";"it";"that";"this";"and";"to";"of";"so";
- "will";"can";"which";"for";"on";"in";"an";"with";"the";"-"]
-
-let wordcount () =
- Ctx.init Sys.argv.(1) "tcp://localhost:5555";
- Ctx.load "unix://data/wordcount.data"
- |> Ctx.flatmap Str.(split (regexp "[ \t\n]"))
- |> Ctx.map String.lowercase_ascii
- |> Ctx.filter (fun x -> (String.length x) > 0)
- |> Ctx.filter (fun x -> not (List.mem x stop_words))
- |> Ctx.map (fun k -> (k,1))
- |> Ctx.reduce_by_key (+)
- |> Ctx.collect
- |> List.flatten |> print_result;
- Ctx.terminate ()
-
-let _ = wordcount ()
-
Parameter Server Engine
-The Parameter Server topology proposed by [@li2014scaling] is similar: nodes are divided into servers holding the shared global view of the up-to-date model parameters, and workers, each holding its own view of the model and executing training. The workers and servers communicate in the format of key-value pairs. It is proposed to address of challenge of sharing large amount of parameters within a cluster. The parameter server paradigm applies an asynchronous task model to educe the overall network bandwidth, and also allows for flexible consistency, resource management, and fault tolerance.
-Simple Example (distributed training) with illustration: IMAGE: Distributed training with Parameter Server (Src:[@li2014scaling])
-According to this example, we can see that the Parameter Server paradigm mainly consists of four APIs for the users.
-
-schedule: decide what model parameters should be computed to update in this step. It can be either a local decision or a central decision.
pull: retrieve the updates of model parameters from somewhere then applies them to the local model. Furthermore, the local updates will be computed based on the scheduled model parameter.
push: send the updates to the model plane. The updates can be sent to either a central server or to individual nodes depending on which engine is used(e.g., map-reduce, parameter server, or peer-to-peer).
barrier: decide whether to advance the local step. Various synchronisation methods can be implemented. Besides the classic BSP, SSP, and ASP, we also implement the proposed PSP within this interface.
-The interfaces in Actor:
-
-
val start : ?barrier:barrier -> string -> string -> unit
-(** start running the model loop *)
-
-val register_barrier : ps_barrier_typ -> unit
-(** register user-defined barrier function at p2p server *)
-
-val register_schedule : ('a, 'b, 'c) ps_schedule_typ -> unit
-(** register user-defined scheduler *)
-
-val register_pull : ('a, 'b, 'c) ps_pull_typ -> unit
-(** register user-defined pull function executed at master *)
-
-val register_push : ('a, 'b, 'c) ps_push_typ -> unit
-(** register user-defined push function executed at worker *)
-
-val register_stop : ps_stop_typ -> unit
-(** register stopping criterion function *)
-
-val get : 'a -> 'b * int
-(** given a key, get its value and timestamp *)
-
-val set : 'a -> 'b -> unit
-(** given a key, set its value at master *)
-
-val keys : unit -> 'a list
-(** return all the keys in a parameter server *)
-
-val worker_num : unit -> int
-(** return the number of workers, only work at server side *)
-
EXPLAIN
-Example of using PS in Actor :
-
-
module PS = Actor_param
-
-let schedule workers =
- let tasks = List.map (fun x ->
- let k, v = Random.int 100, Random.int 1000 in (x, [(k,v)])
- ) workers in tasks
-
-let push id vars =
- let updates = List.map (fun (k,v) ->
- Owl_log.info "working on %i" v;
- (k,v) ) vars in
- updates
-
-let test_context () =
- PS.register_schedule schedule;
- PS.register_push push;
- PS.start Sys.argv.(1) Actor_config.manager_addr;
- Owl_log.info "do some work at master node"
-
-let _ = test_context ()
-
Peer-to-Peer Engine
-In the above approaches the model parameter storage is managed by a set of centralised servers. In contrast, Peer-to-Peer (P2P) is a fully distributed structure, where each node contains its own copy of the model and nodes communicate directly with each other. The benefit of this approach.
-Illustrate how distributed computing can be finished with P2P model, using a figure.
-To obtain the aforementioned two pieces of information, we can organise the nodes into a structured overlay (e.g., chord or kademlia), the total number of nodes can be estimated by the density of each zone (i.e., a chunk of the name space with well-defined prefixes), given the node identifiers are uniformly distributed in the name space. Using a structured overlay in the design guarantees the following sampling process is correct, i.e., random sampling.
-Implementation in Actor:
-
-
open Actor_types
-
-(** start running the model loop *)
-val start : string -> string -> unit
-
-(** register user-defined barrier function at p2p server *)
-val register_barrier : p2p_barrier_typ -> unit
-
-(** register user-defined pull function at p2p server *)
-val register_pull : ('a, 'b) p2p_pull_typ -> unit
-
-(** register user-defined scheduler at p2p client *)
-val register_schedule : 'a p2p_schedule_typ -> unit
-
-(** register user-defined push function at p2p client *)
-val register_push : ('a, 'b) p2p_push_typ -> unit
-
-(** register stopping criterion function at p2p client *)
-val register_stop : p2p_stop_typ -> unit
-
-(** given a key, get its value and timestamp *)
-val get : 'a -> 'b * int
-
-(** given a key, set its value at master *)
-val set : 'a -> 'b -> unit
-
EXPLAIN
-Example of using P2P in Actor (SGD):
-
-
open Owl
-open Actor_types
-
-
-module MX = Mat
-module P2P = Actor_peer
-
-...
-
-let schedule _context =
- Owl_log.debug "%s: scheduling ..." !_context.master_addr;
- let n = MX.col_num !_model in
- let k = Stats.Rnd.uniform_int ~a:0 ~b:(n - 1) () in
- [ k ]
-
-let push _context params =
- List.map (fun (k,v) ->
- Owl_log.debug "%s: working on %i ..." !_context.master_addr k;
- let y = MX.col !data_y k in
- let d = calculate_gradient 10 !data_x y v !gradfn !lossfn in
- let d = MX.(d *$ !step_t) in
- (k, d)
- ) params
-
-let barrier _context =
- Owl_log.debug "checking barrier ...";
- true
-
-let pull _context updates =
- Owl_log.debug "pulling updates ...";
- List.map (fun (k,v,t) ->
- let v0, _ = P2P.get k in
- let v1 = MX.(v0 - v) in
- k, v1, t
- ) updates
-
-let stop _context = false
-
-let start jid =
- P2P.register_barrier barrier;
- P2P.register_schedule schedule;
- P2P.register_push push;
- P2P.register_pull pull;
- P2P.register_stop stop;
- Owl_log.info "P2P: sdg algorithm starts running ...";
- P2P.start jid Actor_config.manager_addr
-
EXPLAIN
-
-
-
-Classic Synchronise Parallel
-To ensure the correctness of computation, normally we need to make sure a correct order of updates. For example, one worker can only proceed when the model has been updated with all the workers’ updates from previous round. However, the iterative-convergent nature of ML programmes means that they are error-prone to a certain degree.
-Most consistent system often leads to less than ideal system throughput. This error-proneness means that, the consistency can be relaxed a bit without sacrificing accuracy, and gains system performance at the same time. This trade-off is decided by the ``barrier’’ in distributed ML. A lot of research on it, both theoretically and practically.
-Existing distributed processing systems operate at various points in the space of consistency/speed trade-offs. However, all effectively use one of three different synchronisation mechanisms: Bulk Synchronise Parallel (BSP), Stale Synchronise Parallel (SSP), and Asynchronous Parallel (ASP). These are depicted in [@fig:distributed:barriers].
-
- Barrier control methods used for synchronisation
-
-
-
Barrier control methods used for synchronisation
-
-
-Bulk Synchronous Parallel
-Bulk Synchronous Parallel (BSP) is a deterministic scheme where workers perform a computation phase followed by a synchronisation/communication phase where they exchange updates. The method ensures that all workers are on the same iteration of a computation by preventing any worker from proceeding to the next step until all can. Furthermore, the effects of the current computation are not made visible to other workers until the barrier has been passed. Provided the data and model of a distributed algorithm have been suitably scheduled, BSP programs are often serialisable – that is, they are equivalent to sequential computations. This means that the correctness guarantees of the serial program are often realisable making BSP the strongest barrier control method. Unfortunately, BSP does have a disadvantage. As workers must wait for others to finish, the presence of stragglers, workers which require more time to complete a step due to random and unpredictable factors, limit the computation efficiency to that of the slowest machine. This leads to a dramatic reduction in performance. Overall, BSP tends to offer high computation accuracy but suffers from poor efficiency in unfavourable environments.
-BSP is the most strict lockstep synchronisation; all the nodes are coordinated by a central server. BSP is sensitive to stragglers so is very slow. But it is simple due to its deterministic nature, easy to write application on top of it.
-
-
-Asynchronous Parallel
-Asynchronous Parallel (ASP)} takes the opposite approach to BSP, allowing computations to execute as fast as possible by running workers completely asynchronously. In homogeneous environments (e.g. data centers), wherein the workers have similar configurations, ASP enables fast convergence because it permits the highest iteration throughputs. Typically, \(P\)-fold speed-ups can be achieved by adding more computation/storage/bandwidth resources. However, such asynchrony causes delayed updates: updates calculated on an old model state which should have been applied earlier but were not. Applying them introduces noise and error into the computation. Consequently, ASP suffers from decreased iteration quality and may even diverge in unfavourable environments. Overall, ASP offers excellent speed-ups in convergence but has a greater risk of diverging especially in a heterogeneous context.
-ASP is the Least strict synchronisation, no communication among workers for barrier synchronisation all all. Every computer can progress as fast as it can. It is fast and scalable, but often produces noisy updates. No theoretical guarantees on consistency and algorithm’s convergence.
-
-
-Stale Synchronous Parallel
-Stale Synchronous Parallel (SSP) is a bounded asynchronous model which can be viewed as a relaxation of BSP. Rather than requiring all workers to be on the same iteration, the system decides if a worker may proceed based on how far behind the slowest worker is, i.e. a pre-defined bounded staleness. Specifically, a worker which is more than \(s\) iterations behind the fastest worker is considered too slow. If such a worker is present, the system pauses faster workers until the straggler catches up. This \(s\) is known as the staleness parameter. More formally, each machine keeps an iteration counter, \(c\), which it updates whenever it completes an iteration. Each worker also maintains a local view of the model state. After each iteration, a worker commits updates, i.e., \(\Delta\), which the system then sends to other workers, along with the worker’s updated counter. The bounding of clock differences through the staleness parameter means that the local model cannot contain updates older than \(c -s - 1\) iterations. This limits the potential error. Note that systems typically enforce a read-my-writes consistency model. The staleness parameter allows SSP to provide deterministic convergence guarantees. Note that SSP is a generalisation of BSP: setting \(s = 0\) yields the BSP method, whilst setting \(s = \infty\) produces ASP. Overall, SSP offers a good compromise between fully deterministic BSP and fully asynchronous ASP~, despite the fact that the central server still needs to maintain the global state to guarantee its determinism nature.
-SSP relaxes consistency by allowing difference in iteration rate. The difference is controlled by the bounded staleness. SSP is supposed to mitigate the negative effects of stragglers. But the server still requires global state.
-
-
-
-Probabilistic Synchronise Parallel
-Existing barrier methods allow us to balance consistency against iteration rate in attempting to achieve a high rate of convergence. In particular, SSP parameterises the spectrum between ASP and BSP by introducing a staleness parameter, allowing some degree of asynchrony between nodes so long as no node lags too far behind. Figure~ depicts this trade-off.
-However, in contrast to a highly reliable and homogeneous datacentre context, let’s assume a distributed system consisting of a larger amount of heterogeneous nodes that are distributed at a much larger geographical areas. The network is unreliable since links can break down, and the bandwidth is heterogeneous. The nodes are not static, they can join and leave the system at any time. We observe that BSP and SSP are not suitable for this scenario, since both are centralised mechanisms: a single server is responsible for receiving updates from each node and declaring when the next iteration can proceed.
-In contrast, ASP is fully distributed and no single node is responsible for the system making progress. We examine this trade-off in more detail, and suggest that the addition of a new sampling primitive exposes a second axis on which solutions can be placed, leading to greater flexibility in how barrier controls can be implemented. We call the resulting barrier control method (or, more precisely, family of barrier control methods) Probabilistic Synchronous Parallel, or PSP.
-
-Basic idea: sampling
-The idea of PSP is simple: in a unreliable environment, we can minimise the impact of outliers and stragglers by guaranteeing the majority of the system have synchronised boundary. The reason we can drop the results from certain portion of workers is that, practically many iterative learning algorithms can tolerate certain level of errors in the process of converging to final solutions. Given a well-defined boundary, if most of the nodes have passed it, the impact of those lagged nodes should be minimised.
-Therefore, in PSP, all we need to do is to estimate what percent of nodes have passed a given synchronisation barrier. Two pieces of information is required to answer this question: - an estimate on the total number of nodes in the system; - an estimate of the distribution of current steps of the nodes.
-In PSP, either a central oracle tracks the progress of each worker or the workers each hold their own local view. In a centralised system, without considering the difficulty of monitoring state of all the nodes as system grows bigger, these two pieces of information is apparently trivial to get at a central server. However, in a distributed system, where each node does not have global knowledge of other nodes, how can it get these information? In that case, a node randomly selects a subset of nodes in the system and query their individual current local step. By so doing, it obtains a sample of the current nodes’ steps in the whole system. By investigating the distribution of these observed steps, it can derive an estimate of the percentage of nodes which have passed a given step. After deriving the estimate on the step distribution, a node can choose to either pass the barrier by advancing its local step if a given threshold has been reached (with certain probability) or simply holds until certain condition is satisfied. Each node only depends on several other nodes to decide its own barrier.
-
-
-Compatibility
-
- Probabilistic Synchronous Parallel example
-
-
Probabilistic Synchronous Parallel example
-
-One great advantage of PSP is its compatibility with existing synchronisation methods. For classic BSP and SSP, their barrier functions are called by the centralised server to check the synchronisation condition with the given inputs. The output of the function is a boolean decision variable on whether or not to cross the synchronisation barrier, depending on whether the criterion specified in the algorithm is met. With the proposed sampling primitive, almost nothing needs to be changed in aforementioned algorithms except that only the sampled states instead of the global states are passed into the barrier function. Therefore, we can easily derive the probabilistic version of BSP and SSP, namely pBSP and pSSP.
-PSP improves on ASP by providing probabilistic guarantees about convergence with tighter bounds and less restrictive assumptions. pSSP relaxes SSP’s inflexible staleness parameter by permitting some workers to fall further behind. pBSP relaxes BSP by allowing some workers to lag slightly, yielding a BSP-like method which is more resistant to stragglers but no longer deterministic.
-[@fig:distributed:psp_00](a) depicts PSP showing that different subsets of the population of nodes operate in (possibly overlapping) groups, applying one or other barrier control method within their group. In this case, [@fig:distributed:psp_00](b) shows PSP using BSP within group (or pBSP), and [@fig:distributed:psp_00](c) shows PSP using SSP within group (or pSSP).
-Formally, at the barrier control point, a worker samples \(\beta\) out of \(P\) workers without replacement. If a single one of these lags more than \(s\) steps behind the current worker then it waits. This process is pBSP (based on BSP) if \(s = 0\) and pSSP (based on SSP) if \(s > 0\). However, if \(s = \infty\) then PSP reduces to ASP.
-
-
-Barrier Trade-off Dimensions
-
- Extra trade-off exposed through PSP
-
-
Extra trade-off exposed through PSP
-
-This allows us to decouple the degree of synchronisation from the degree of distribution, introducing completeness as a second axis by having each node sample from the population. Within each sampled subgroup, traditional mechanisms can be applied allowing overall progress to be robust against the effect of stragglers while also ensuring a degree of consistency between iterations as the algorithm progresses. As [@fig:distributed:psp_01](a-b) depicts, the result is a larger design space for synchronisation methods when operating distributed data processing at scale.
-As [@fig:distributed:psp_01](c) summarises, probabilistic sampling allows us greater flexibility in designing synchronisation mechanisms in distributed processing systems at scale. When compared with BSP and SSP, we can obtain faster convergence through faster iterations and with no dependence on a single centralised server. When compared with ASP, we can obtain faster convergence with stronger guarantees by providing greater consistency between updates.
-Besides its compatibility with existing synchronisation methods, it is also worth emphasising that applying sampling leads to the biggest difference between the classic synchronisation control and probabilistic control: namely the original synchronisation control requires a centralised node to hold the global state whereas the derived probabilistic ones no longer require such information thus can be executed independently on each individual node, further leading to a fully distributed solution.
-
-
-Convergence
-At the barrier control point, every worker samples \(\beta\) out of \(P\) workers without replacement. If a single one of these lags more than \(s\) steps behind the current worker then it waits. The probabilities of a node lagging \(r\) steps are drawn from a distribution with probability mass function \(f(r)\) and cumulative distribution function (CDF) \(F(r)\). Both \(r\) and \(\beta\) can be thought of as constant value.
-In a distributing machine learning process, these \(P\) workers keep generating updates, and the model is updated with them continuously. In this sequence of updates, each one is indexed by \(t\) (which does not mean clock time), and the total length of this sequence is \(T\). Ideally, in a fully deterministic barrier control system, such as BSP, the ordering of updates in this sequence should be fixed. We call it a true sequence. However, in reality, what we get is often a noisy sequence, where updates are reordered due to sporadic and random network and system delays. The difference, or lag, between the order of these two sequence, is denoted by \(\gamma_{t}\).
-Without talking too much about math in detail in this book, to prove the convergence of PSP requires to construct and idea sequence of updates, each generated by workers in the distributed learning, and compare it with the actual sequence after applying PSP. The target of proof is to show that, given sufficient time \(t\), the difference between these two sequences \(\gamma_t\) is limited.
-The complete proof of convergence is too long to fit into this chapter. Please refer to [@wang2017probabilistic] for more detail if you are interested in the math. One key step in the proof is to show that the mean and variance of \(\gamma_t\) are bounded. The average of the mean is bounded by:
-\[\frac{1}{T} \sum_{t=0}^{T} E(\gamma_{t}) \leq S \left( \frac{r(r+1)}{2} + \frac{a(r + 2)}{(1-a)^{2}} \right).\] {#eq:distributed:bound_mean}
-The average of the variance has a similar bound:
-\[\frac{1}{T} \sum_{t=0}^{T} E(\gamma_{t}^{2}) < S \left(\frac{r(r+1)(2r+1)}{6} + \frac{a(r^{2} + 4)}{(1-a)^{3}} \right),\] {#eq:distributed:bound_var}
-where \[S = \frac{1-a}{F(r)(1-a) + a - a^{T-r+1}}.\] {#eq:distributed:bound_s}
-The intuition is that, when applying PSP, the update sequence we get will not be too different from the true sequence. To demonstrate the impact of the sampling primitive on bounds quantitatively, [@fig:distributed:proof_exp] shows how increasing the sampling count, \(\beta\), (from 1, 5, to 100, marked with different line colours on the right) yields tighter bounds. The sampling count \(\beta\) is varied between 1 and 100 and marked with different line colours on the right. The staleness, \(r\), is set to 4 with \(T\) equal to 10000. The bounds on \(\gamma_t\) mean that what a true sequence achieves, in time, a noisy sequence can also achieve, regardless of the order of updates. Notably, only a small number of nodes need to be sampled to yield bounds close to the optimal. This result has an important implication to justify using sampling primitive in large distributed learning systems due to its effectiveness.
-
- Plot showing the bound on the average of the means and variances of the sampling distribution.
-
-
-
-
-
Plot showing the bound on the average of the means and variances of the sampling distribution.
-
-
-
-
-A Distributed Training Example
-In this section, we investigate performance of the proposed PSP in experiments. We focus on two common metrics in evaluating barrier strategies: the step progress and accuracy. We use the training of a DNN as an example, using a 9-layer structure used in the Neural Network chapter, and for the training we also use the MNIST handwritten digits dataset. The learning rate has a decay factor of \(1e4\). The network structure is shown below:
-
-
let make_network () =
- input [|28;28;1|]
- |> normalisation ~decay:0.9
- |> conv2d [|5;5;1;32|] [|1;1|] ~act_typ:Activation.Relu
- |> max_pool2d [|2;2|] [|2;2|]
- |> dropout 0.1
- |> fully_connected 1024 ~act_typ:Activation.Relu
- |> linear 10 ~act_typ:Activation.(Softmax 1)
- |> get_network
-
We use both real-world experiments and simulations to evaluate different barrier control methods. The experiments run on 6 nodes using Actor. To extend the scale, we have also built a simulation platform. For both cases, we implement the Parameter Server framework. It consists of one server and many worker nodes. In each step, a worker takes a chunk of training data, calculates the weight value, and then aggregates these updates to the parameter server, thus updating the shared model iteratively. A worker pulls new model from server after it is updated.
-
-Step Progress
-First, we are going to investigate if PSP achieves faster iteration speed. We use 200 workers, and run the simulation for 200 simulated seconds. [@fig:distributed:exp_step_01] shows the distribution of all nodes’ step progress when simulation is finished.
-
- Progress distribution in steps
-
-
Progress distribution in steps
-
-As expected, the most strict BSP leads to a tightly bounded step distribution, but at the same time, using BSP makes all the nodes progress slowly. At the end of simulation, all the nodes only proceed to about 30th step. As a comparison, using ASP leads to a much faster progress of around 100 steps. But the cost is a much loosely spread distribution, which shows no synchronisation at all among nodes. SSP allows certain staleness (4 in our experiment) and sits between BSP and ASP.
-PSP shows another dimension of performance tuning. We set sample size \(\beta\) to 10, i.e. a sampling ratio of only 5%. The result shows that pBSP is almost as tightly bound as BSP and also much faster than BSP itself. The same is also true when comparing pSSP and SSP. In both cases, PSP improves the iteration efficiency while limiting dispersion.
-
- pBSP parameterised by different sample sizes, from 0 to 64.
-
-
pBSP parameterised by different sample sizes, from 0 to 64.
-
-To further investigate the impact of sample size, we focus on BSP, and choose different sample sizes. In [@fig:distributed:exp_step_02] we vary the sample size from 0 to 64. As we increase the sample size step by step, the curves start shifting from right to left with tighter and tighter spread, indicating less variance in nodes’ progress. With sample size 0, the pBSP exhibits exactly the same behaviour as that of ASP; with increased sample size, pBSP starts becoming more similar to SSP and BSP with tighter requirements on synchronisation. pBSP of sample size 4 behaves very close to SSP.
-Another interesting thing we notice in the experiment is that, with a very small sample size of one or two (i.e., very small communication cost on each individual node), pBSP can already effectively synchronise most of the nodes comparing to ASP. The tail caused by stragglers can be further trimmed by using larger sample size. This observation confirms our convergence analysis, which explicitly shows that a small sample size can effectively push the probabilistic convergence guarantee to its optimum even for a large system size, which further indicates the superior scalability of the proposed solution.
-
-
-Accuracy
-Next, we evaluate barrier control methods in training a deep neural network using MNIST dataset. We use inference accuracy on test dataset as measurement of performance.
-To run the code, we mainly implement the interfaces we mentioned before: sche, push, and pull. sche and pull are performed on server, and push is on worker.
-
-
let schd nodes =
- Actor_log.info "#nodes: %d" (Array.length nodes);
- if (Array.length nodes > 0) then (
- eval_server_model ()
- );
-
- let server_value = (get [|key_name|]).(0) in
- Array.map (fun node ->
- Actor_log.info "node: %s schd" node;
- let wid = int_of_uuid node in
- let v = make_task server_value.weight wid in
- let tasks = [|(key_name, v)|] in
- (node, tasks)
- ) nodes
-
-let pull kv_pairs =
- Gc.compact ();
- (* knowing that there is only one key...*)
- let key = key_name in
- Actor_log.info "pull: %s (length: %d) " key (Array.length kv_pairs);
-
- let s_value = (get [|key|]).(0) in
- let s_weight = ref s_value.weight in
- Array.iter (fun (_, v) ->
- s_weight := add_weight !s_weight v.weight;
- model.clocks.(v.wid) <- model.clocks.(v.wid) + 1
- ) kv_pairs;
- let value = make_task !s_weight 0 in (* wid here is meaningless *)
- [|(key, value)|]
-
-
And on worker:
-
-
let push kv_pairs =
- Gc.compact ();
- Array.map (fun (k, v) ->
- Actor_log.info "push: %s" k;
- (* simulated communication delay *)
-
- (* let t = delay.(v.wid) in *)
- let t = Owl_stats.gamma_rvs ~shape:1. ~scale:1. in
- Unix.sleepf t;
-
- let nn = make_network () in
- Graph.init nn;
- Graph.update nn v.weight;
- let x, y = get_next_batch v.wid in
- let x = pack x in
- let y = pack y in
- let _ = CGCompiler.train ~params ~init_model:false nn x y in
- let delta = delta_nn nn v.weight in
- let value = make_task delta v.wid in
- (k, value)
- ) kv_pairs
-
 MNIST training using Actor
-
-
MNIST training using Actor
-
-In [@fig:distributed:exp_accuracy_01], we conduct the real-world experiments using 6 worker nodes with the Parameter Server framework we have implemented. We run the training process for a fixed amount of time, and observe the performance of barrier methods given the same number of updates. It shows that BSP achieves the highest model accuracy with the least of number of updates, while SSP and ASP achieve lower efficiency. With training progressing, both methods show a tendency to diverge. By applying sampling, pBSP and pSSP achieve smoother accuracy progress.
-
-
-
-
-
- Next: Chapter 25Testing Framework
\ No newline at end of file
diff --git a/docs/faqs.html b/docs/faqs.html
deleted file mode 100644
index c982abf..0000000
--- a/docs/faqs.html
+++ /dev/null
@@ -1,11 +0,0 @@
-Owl Online Tutorials
- Why Owl?
-
- Because ...
-
-
-
\ No newline at end of file
diff --git a/docs/index.html b/docs/index.html
deleted file mode 100644
index c97578c..0000000
--- a/docs/index.html
+++ /dev/null
@@ -1,65 +0,0 @@
-Owl Online Tutorials
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
-
Installation Instructions
-
- These instructions are aimed at readers of Owl Online Tutorials,
- though much of what you find here will be useful for anyone who
- wants to get a good working OCaml installation.
-
- At the highest level, here's what you need to do:
-
-
- - Get OPAM installed
-
- - Build OCaml 4.06.0 or later using OPAM or your OS package manager
-
- - With OPAM, install the key libraries that you need to work
- through the examples in the book
-
- - Install Utop, a
- modern interactive toplevel with command history, tab
- completion, and defaults that are tuned to work with the
- examples in Owl Online Tutorials,
-
- - Set up your editing environment.
-
- - Optionally install merlin, a
- tool for providing IDE-like functionality like auto-completion,
- as well as ocp-indent, a
- source code indenter. Both work with emacs and vim, and can be
- adapted to other editors.
-
-
- Note that Windows is not currently supported by the examples
- in Owl Online Tutorials or by OPAM, although it is being worked on.
- Until that's ready, we recommend using a virtual machine running
- Debian Linux on your local machine, or
-Docker for Windows.
-
- Let's get started.
-
- Getting OPAM
-
- The easiest way to install OPAM is through your OS's package
- manager. In most cases, installing OPAM will also trigger the
- installation of OCaml. The version installed isn't important,
- since we can use OPAM itself to install other versions of the
- compiler.
-
- Here are platform-specific instructions.
-
- Mac OS X
-
- If you don't already have a package manager set up, try
- installing homebrew. You can find information on installing
- homebrew here. make sure you have
- the latest XCode (and Command Line Tools for XCode) installed
- from the App Store first.
-
- You can then install OPAM using brew.
-
-brew install opam
-
-
- Another popular package manager on Mac OS X is MacPorts, which also has an OPAM
- package.
-
-sudo port install opam
-
-
- Ubuntu Linux
-
- 14.04 and higher comes with recent versions of OCaml and opam. No PPA
- needed.
-
-sudo apt-get install curl build-essential m4 zlib1g-dev libssl-dev ocaml ocaml-native-compilers opam
-
-
- Debian Linux
-
- Debian's OCaml packages aren't yet at 4.06.0, and so you will
- need to compile it from sources. If you are using the
- Debian 9 stable stream, then OPAM 1.2.2 will
- be available.
-
- Arch Linux
-
- OPAM is available from the AUR (Arch User Repository). You can
- install OPAM using yaourt:
-
-sudo yaourt -S opam
-
-
- Or directly using pacman.
-
-sudo pacman -S base-devel
-wget https://aur.archlinux.org/packages/op/opam/opam.tar.gz
-tar -xvf opam.tar.gz && cd opam
-makepkg
-sudo pacman -U opam-<version>.pkg.tar.xz
-
-
- Building from source
-
- On platforms not listed above, you'll need to install OPAM
- from source, and to do that you'll need OCaml installed first.
- Some platforms, including Fedora Linux, have OCaml packages that
- you can install but not OPAM packages. You can build OPAM on
- OCaml version 4.02.1 or later.
-
- To install OCaml from source, you'll first need a C compiler,
- generally gcc or llvm.
-
- The following is enough to get OCaml installed on most
- platforms.
-
-curl -OL https://github.com/ocaml/ocaml/archive/4.01.tar.gz
-tar -zxvf 4.01.tar.gz
-cd ocaml-4.01
-./configure
-make world world.opt
-sudo make install
-
-
- If you have problems with any of the above, read the
- INSTALL file in the tar file.
-
- Installing OCaml locally
-
- The installation step described above requires administrator
- privileges. You can also install it in your home directory by
- passing the prefix option to the configuration
- script:
-
-./configure -prefix $HOME/my-ocaml
-
-
- Once the installation is completed into this custom location,
- you will need to add $HOME/my-ocaml/bin to your
- PATH, normally by editing ~/.bashrc or
- ~/.profile. You shouldn't really do this unless you
- have special reasons, so try to install binary packages before
- trying a source installation.
-
- Installing OPAM
-
- If the binary packages aren't available for your system,
- you'll need to install the latest OPAM release from source. You
- can follow the online quick install
- guide.
-
- Configuring OPAM
-
- The entire OPAM package database is held in the
- .opam directory in your home directory, including
- compiler installations. On Linux and Mac OS X, this will be the
- ~/.opam directory, which means you don't need
- administrative privileges to configure it. If you run into
- problems configuring OPAM, just delete the whole
- ~/.opam directory and start over.
-
- Let's begin by initialising the OPAM package database. This
- will ask you a few interactive questions at the end. It's safe to
- answer yes to these unless you want to manually control the
- configuration steps yourself as an advanced user.
-
-opam init
-<...>
-=-=-=-= Configuring OPAM =-=-=-=
-Do you want to update your configuration to use OPAM ? [Y/n] y
-[1/4] Do you want to update your shell configuration file ? [default: ~/.profile] y
-[2/4] Do you want to update your ~/.ocamlinit ? [Y/n] y
-[3/4] Do you want to install the auto-complete scripts ? [Y/n] y
-[4/4] Do you want to install the `opam-switch-eval` script ? [Y/n] y
-User configuration:
- ~/.ocamlinit is already up-to-date.
- ~/.profile is already up-to-date.
-Gloabal configuration:
- Updating <root>/opam-init/init.sh
- auto-completion : [true]
- opam-switch-eval: [true]
- Updating <root>/opam-init/init.zsh
- auto-completion : [true]
- opam-switch-eval: [true]
- Updating <root>/opam-init/init.csh
- auto-completion : [true]
- opam-switch-eval: [true]
-
-
- You only need to run this command once, and it will create the
- ~/.opam directory and sync with the latest package
- list from the online OPAM database.
-
- When the init command finishes, you'll see some
- instructions about environment variables. OPAM never installs
- files into your system directories (which would require
- administrator privileges). Instead, it puts them into your home
- directory by default, and can output a set of shell commands
- which configures your shell with the right PATH
- variables so that packages will just work.
-
- If you choose not to follow the OPAM instructions to add
- itself to your shell profile, you can still configure it
- on-the-fly in your current shell with just one command.
-
-
-eval `opam config env`
-
-
- This evaluates the results of running opam config
- env in your current shell and sets the variables so that
- subsequent commands will use them. This only works with
- your current shell and it can only be automated for future shells
- by adding the line to your login scripts. On Mac OS X you should
- typically use ~/.profile, and ~/.bashrc
- on most Linux setups.
-
- OPAM isn't unusual in this approach; the SSH
- ssh-agent also works similarly, so if you're having
- any problems just hunt around in your configuration scripts to
- see how that's being invoked.
-
- If you answered yes to the auto-complete scripts
- question during opam init, this should have all been
- set up for you. You can verify this worked by seeing if the
- OCAML_TOPLEVEL_PATH environment variable is set. You
- can do this in bash as follows.
-
-printenv OCAML_TOPLEVEL_PATH
-/Users/myusername/.opam/4.06.0/lib/toplevel
-
-
- The next step is to make sure we have the right compiler
- version installed.
-
-opam switch
-system C system System compiler (4.00.1)
--- -- 4.04.2 Official 4.04.2 release
--- -- 4.05.0 Official 4.05.0 release
--- -- 4.06.0 Official 4.06.0 release
-
-
- If, as in this case, your system compiler is older than
- 4.06.0, you should install a more up to date version
- of the compiler, as shown below.
-
-opam switch 4.06.0
-eval `opam config env`
-
-
- The switch itself will take around ten or fifteen
- minutes on a modern machine, and will download and install the
- OCaml compiler within the ~/.opam directory). You
- can install multiple compilers at once, and switching between
- them once they're installed is fast.
-
- The new compiler and all libraries associated with it will be
- installed in ~/.opam/4.01.0.
-
- Finally, we're ready to install the libraries and tools we'll
- need for the book. The most important ones are core,
- which provides the standard library that all the examples in the
- book are based on, and utop, which is the
- interactive toplevel that you can use for working through the
- examples.
-
-opam install core utop
-
-
- This will take about five or ten minutes to build, and will
- install the requested packages along with a bunch of
- dependencies. But there are other libraries that will be useful
- as you go through the book that you might as well install
- now.
-
-opam install async yojson core_extended core_bench cohttp async_graphics cryptokit menhir
-
-
- If some of the above don't work, don't worry too much. Most of
- them come up in only a few places in the book. (There are some
- known problems right now: in particular,
- core_extended doesn't install cleanly on recent
- versions of OS X, due to an issue with the re2
- library it depends on. That is expected to be resolved soon.)
-
- Note that if you've installed utop and can't
- launch it from the shell, make sure you've run eval `opam
- config env` in this shell. In general, you should just get
- this set up as part of your shell init scripts, as described
- earlier.
-
- Setting up and using utop
-
- When you first run utop, you'll find yourself at
- an interactive prompt with a bar at the bottom of the screen. The
- bottom bar dynamically updates as you write text, and contains
- the possible names of modules or variables that are valid at that
- point in the phrase you are entering. You can press the
- <tab> key to complete the phrase with the
- first choice.
-
- The ~/.ocamlinit file in your home directory
- initializes utop with common libraries and syntax
- extensions so you don't need to type them in every time. Given
- that you have Core installed, you should update your
- ocamlinit to load Core every time you start
- utop, by adding the following lines.
-
-#use "topfind";;
-#thread;;
-#require "core.top";;
-#require "core.syntax";;
-
-
- For utop only you could get away with just the
- last two lines, but you need the whole thing if you want the
- traditional ocaml toplevel to work too.
-
- Note that opam will have already added some lines
- to the file. Also, notice that # is used to mark a
- toplevel directive, not a comment.
-
- If you want to use Core as your primary standard library, then
- you should open the Core module by default,
- which you can do by appending the following to the end of your
- .ocamlinit.
-
-open Core
-
-
- When you run utop with these initialization
- rules, it should start up with Core opened and ready to use. If
- you don't open Core by default, then you must
- remember to open it before running any of the interactive
- examples in the book.
-
- Editors
-
- Emacs
-
- These instructions have been tested on emacs 24.2 and should
- work for that version and newer. There are some reports of
- problems with earlier emacsen.
-
- tuareg is the most commonly used mode for editing
- OCaml code in emacs. You can download it here. You should download
- it and untar it into some subdirectory of your home
- directory.
-
- Once you've done that, you can add the following rather
- lengthy snippet to your .emacs file.
-
-;; -- common-lisp compatibility if not added earlier in your .emacs
-(require 'cl)
-
-;; -- Tuareg mode -----------------------------------------
-;; Add Tuareg to your search path
-(add-to-list
- 'load-path
- ;; Change the path below to be wherever you've put your tuareg installation.
- (expand-file-name "~/lib/elisp/tuareg"))
-(require 'tuareg)
-(setq auto-mode-alist
- (append '(("\\.ml[ily]?$" . tuareg-mode))
- auto-mode-alist))
-
-;; -- Tweaks for OS X -------------------------------------
-;; Tweak for problem on OS X where Emacs.app doesn't run the right
-;; init scripts when invoking a sub-shell
-(cond
- ((eq window-system 'ns) ; macosx
- ;; Invoke login shells, so that .profile or .bash_profile is read
- (setq shell-command-switch "-lc")))
-
-;; -- opam and utop setup --------------------------------
-;; Setup environment variables using opam
-(dolist
- (var (car (read-from-string
- (shell-command-to-string "opam config env --sexp"))))
- (setenv (car var) (cadr var)))
-;; Update the emacs path
-(setq exec-path (split-string (getenv "PATH") path-separator))
-;; Update the emacs load path
-(push (concat (getenv "OCAML_TOPLEVEL_PATH")
- "/../../share/emacs/site-lisp") load-path)
-;; Automatically load utop.el
-(autoload 'utop "utop" "Toplevel for OCaml" t)
-(autoload 'utop-setup-ocaml-buffer "utop" "Toplevel for OCaml" t)
-(add-hook 'tuareg-mode-hook 'utop-setup-ocaml-buffer)
-
-
- Once this successfully loads in Emacs, you can run
- utop by doing M-x utop in Emacs. You
- can also use commands like Ctrl-c Ctrl-b to evaluate
- your current buffer in utop, or Ctrl-c
- Ctrl-e to just evaluate a single expression.
-
- There are more detailed instructions at the utop
- homepage.
-
- Using Emacs24 packages
-
- As an alternative to the setup above, here is a simplified
- OCaml setup using MELPA
- packages.
-
- Add to .emacs.d/init.el
-
-(require 'package)
-(add-to-list 'package-archives
- '("melpa" . "http://melpa.milkbox.net/packages/") t)
-
-
- Now do M-x package-install and install
- tuareg, utop and
- merlin.
-
- Then add the rest of the configuration to
- .emacs.d/init.el
-
-(add-hook 'tuareg-mode-hook 'tuareg-imenu-set-imenu)
-(setq auto-mode-alist
- (append '(("\\.ml[ily]?$" . tuareg-mode)
- ("\\.topml$" . tuareg-mode))
- auto-mode-alist))
-(autoload 'utop-setup-ocaml-buffer "utop" "Toplevel for OCaml" t)
-(add-hook 'tuareg-mode-hook 'utop-setup-ocaml-buffer)
-(add-hook 'tuareg-mode-hook 'merlin-mode)
-(setq merlin-use-auto-complete-mode t)
-(setq merlin-error-after-save nil)
-
-
- Vim
-
- Vim users can use the built-in style, and ocaml-annot may also be
- useful. For a more richly-featured setup, see the section on
- Merlin below.
-
- Eclipse
-
- Eclipse is a popular IDE usually used for Java development.
- The OCaml Development Tools
- (ODT) project provides equivalent IDE features for editing
- and compiling OCaml code, such as automatic compilation and name
- completion. Installation instructions can be found here
-
- Other editors
-
- There are lots of other editors, and many of them come with
- built-in OCaml modes. These includes TextMate and Sublime Text
- for the Mac, and countless others.
-
- Cross-editor tools
-
- There are a number of tools that are compatible with multiple
- editors that can help you work more effectively with OCaml. Two
- of the best are merlin and ocp-indent,
- which we'll describe below. Note that these are very much
- optional. You might want to get started with the book before
- getting back to setting these up.
-
- Merlin
-
- Merlin provides a number of advanced IDE-like features,
- including:
-
-
- - context-sensitive auto-completion
-
- - interactive type-querying (i.e., you can ask it, "what is
- the type of this expression")
-
- - error reporting -- it will highlight parts of your code
- that don't compile as you go.
-
-
- You can install merlin with OPAM:
-
-opam install merlin
-
-
- Then you will need to add configuration for your editor. The
- following examples assume Merlin has been installed through OPAM
- as above.
-
- Emacs
-
- A summary follows -- for more complete information, see
-
- Merlin's Emacs documentation.
-
-;; -- merlin setup ---------------------------------------
-
-(setq opam-share (substring (shell-command-to-string "opam config var share") 0 -1))
-(add-to-list 'load-path (concat opam-share "/emacs/site-lisp"))
-(require 'merlin)
-
-;; Enable Merlin for ML buffers
-(add-hook 'tuareg-mode-hook 'merlin-mode)
-
-;; So you can do it on a mac, where `C-<up>` and `C-<down>` are used
-;; by spaces.
-(define-key merlin-mode-map
- (kbd "C-c <up>") 'merlin-type-enclosing-go-up)
-(define-key merlin-mode-map
- (kbd "C-c <down>") 'merlin-type-enclosing-go-down)
-(set-face-background 'merlin-type-face "#88FF44")
-
-;; -- enable auto-complete -------------------------------
-;; Not required, but useful along with merlin-mode
-(require 'auto-complete)
-(add-hook 'tuareg-mode-hook 'auto-complete-mode)
-
-
- Here are some of the more useful key commands that merlin
- provides:
-
-
- C-c C-t: merlin-type-enclosing:
- show you the type of the current expression.
- C-<up> and C-<down> can
- then be used to look at the types of enclosing expressions, or
- drill down to smaller ones.C-c <TAB>: if you have auto-complete set
- up, this gives you a list of possible auto-completions, along
- with their types. You can use C-s to search within
- that list.C-c C-l: to go to the definition of the value
- under your cursor.C-c r: to restart merlin if it gets
- confused
-
- Vim
-
- A summary follows -- for more complete information, see
-
- Merlin's Vim documentation and :h merlin.txt
- after installing.
-
-" Your vimrc
-filetype plugin indent on
-syntax enable
-
-" Vim needs to be built with Python scripting support, and must be
-" able to find Merlin's executable on PATH.
-if executable('ocamlmerlin') && has('python')
- let s:ocamlmerlin = substitute(system('opam config var share'), '\n$', '', '''') . "/merlin"
- execute "set rtp+=".s:ocamlmerlin."/vim"
- execute "set rtp+=".s:ocamlmerlin."/vimbufsync"
-endif
-
-
- As a one-time step after installation, index the documentation
- in Vim's help system:
-
-:execute "helptags " . substitute(system('opam config var share'), '\n$', '', '''')
-
-
- Some highlights of the functionality this enables:
-
-
- - Autocompletion with Vim's omnicomplete system:
-
<C-x><C-o>
-
- - Quick type checking with keybindings -- the defaults use
-
LocalLeader, which is normally backslash
- (\) by default:
-
-
- \t: type of expression under the cursor
- (also works with a visual selection).\n / \p: expand/contract the
- expression(s) to type check.
-
-
- :Locate [identifier]: go to the definition of
- given identifier or the one under the cursor.:Reload: if Merlin gets confused following
- build changes like new packages.:GotoDotMerlin: edit the .merlin
- project configuration (see below).
-
- The plugin can integrate with some other popular Vim plugins
- such as Syntastic and neocomplcache -- see :help
- merlin.txt for pointers.
-
- Tell Merlin about your project layout
-
- Regardless of which editor you use, you need to tell Merlin a
- bit about the build environment you're working with in order for
- it to work properly. This is done by creating a
- .merlin file. If you're building applications based
- on Core and Async using the corebuild script (which
- is built on top of ocamlbuild), then the following
- is a good starting point.
- S .
-B _build
-PKG core
-PKG async
-PKG core_extended
-EXT nonrec
-
-
- See the Merlin README for complete details of the file
- format.
-
- ocp-indent
-
- ocp-indent is a source-code indenter which
- includes a command-line tool, library and integration with emacs
- and vi. It does a better job than most editor modes, including
- tuareg, and has the advantage that it can be used as a
- command-line tool and be integrated into multiple editors, so you
- get consistent indentation across tools.
-
- You can install it with opam:
-
-opam install ocp-indent
-
-
- Emacs
-
- After installing through OPAM, simply load the file as follows
- to override tuareg-mode's indentation:
-
-(setq opam-share (substring (shell-command-to-string "opam config var share") 0 -1))
-(load-file (concat opam-share "/typerex/ocp-indent/ocp-indent.el"))
-
-
- Vim
-
- After installing through OPAM, simply add this
- autocmd to your Vim configuration:
-
-" Your vimrc
-autocmd FileType ocaml execute "set rtp+=" . substitute(system('opam config var share'), '\n$', '', '''') . "/ocp-indent/vim/indent/ocaml.vim"
-
-
\ No newline at end of file
diff --git a/docs/introduction.html b/docs/introduction.html
deleted file mode 100644
index 846ce89..0000000
--- a/docs/introduction.html
+++ /dev/null
@@ -1,314 +0,0 @@
-Introduction - Owl Online Tutorials
-Introduction
-This chapter briefly introduces the outline of the whole book, targeted audience, how to use the book, and then the installation of Owl. There are different ways to interact with Owl, including utop, notebook, and the Owl-Jupyter. Feel free to choose one as you are exploring the Owl world with us.
-
-What Is Scientific Computing
-Scientific Computing is a rapidly evolving multidisciplinary field which uses advanced computing capabilities to understand and solve complex problems. The algorithms used in scientific computing can be generally divided into two types: numerical analysis, and computer algebra (or symbolic computation). The former uses numerical approximation to solve mathematical problems, while the latter requires a exact close-form representation of computation and manipulates symbols that are not assigned specific values.
-Both approaches are widely used in various applications fields, such as engineering, physics, biology, finance, etc. Even though these advanced applications are sophisticated, they are all built atop of basic numerical operations in a scientific library, most of which Owl has already provided. For example, you can write a deep neural network with Owl in a few lines of code:
-
-
open Owl
-open Neural.S
-open Neural.S.Graph
-open Neural.S.Algodiff
-
-let make_network input_shape =
- input input_shape
- |> lambda (fun x -> Maths.(x / F 256.))
- |> conv2d [|5;5;1;32|] [|1;1|] ~act_typ:Activation.Relu
- |> max_pool2d [|2;2|] [|2;2|]
- |> dropout 0.1
- |> fully_connected 1024 ~act_typ:Activation.Relu
- |> linear 10 ~act_typ:Activation.(Softmax 1)
- |> get_network
-
It actually consists of basic operations such as add, div, convolution, dot, etc. It’s totally OK if you have no idea what this piece of code is doing. We’ll cover that later in this book. The point is that how to dissect a complex application into basic building blocks in a numerical library, and that’s what we are trying to convey throughout this book.
-
-
-What is Functional Programming
-Most existing numerical or scientific computing software are based on the imperative programming paradigm, which uses statements that change a program’s state. Imperative programs often work by being built from one or more procedures, or functions. This modular style is widely adopted. Later around 1980s the idea of object oriented programming is rapidly developed. It extends the modular programming style to include the idea of “object”. An object can contains both data and procedure codes. The imperative programming is not widely adopted in numerical computing for no reason. Almost all computers’ hardware implementation follows imperative design. Actually, FORTRAN, the first cross-platform programming language and an imperative language, is still heavily used for numerical and scientific computations in various fields after first being developed at the 1950s. There is a good chance that, even if you are using modern popular numerical libraries such as SciPy, Julia, or Matlab, they still rely on FORTRAN in the core part somewhere.
-As a contrast, the Functional Programming seems to born to perform hight-level tasks. When John McCarthy designed LISP, the first functional programming language, he meant to use it in the artificial intelligence field. The S-expression it uses was meant to be an intermediate representation, but later proved to be powerful and expressive enough. In LISP you can see the clear distinction between functional and imperative programming. Whereas the later uses a sequence of statements to change the state of the program, the former one builds a program that constructs a tree of expressions by using and composing functions.
-The fundamental difference between these two programming paradigms lies the underlying model of computation. The imperative one is based on the Alan Turing model. In their book Alan Turing: His Work and Impact, S. Barry Cooper and J. Van Leeuwen said that “computability via Turing machines gave rise to imperative programming”. On the other hand, functional programming evolves from the lambda calculus, a formal system of computation built from function application. Lambda Calculus was invented by Alonzo Church in the 1930s, and it was meant to be a formal mathematical logic systems, instead of programming language. Actually, it was not until the programming language was invented that the relationship between these two is revealed. Turing himself proved that the lambda calculus is Turing complete. (Fun fact: Turing is the student of Church.) We can say that the Lambda calculus is the basis of all functional programming languages.
-Compared to imperative programming, functional programming features immutable data, first-class functions, and optimisations on tail-recursion. By using techniques such as higher oder functions, currying, map & reduce etc., functional programming can often achieves parallelisation of threads, lazy evaluation, and determinism of program execution. But asides from these benefits, we are now talking about numerical computation which requires good performance. The question is, do we want to use a functional programming language to do scientific computing? We hope that by presenting Owl, which built on the functional programming language OCaml, we can give you an satisfactory answer.
-
-
-Who Is This Book For
-We really hope this book can cover as broad an audience as possible. Both scientific computing and functional programming are big areas, therefore it is quite a challenge to write a book that satisfies everyone. If you are reading this book now, we assume you are already interested in analytical tasks and enthusiastic about gaining some hands-on experience with functional programming languages. We also assume you know how to program in OCaml and are familiar with the core concepts of functional programming.
-We want this book to be relatively general so we have covered many topics in scientific computing. However, this means we cannot dive very deeply into each topic, and each of them per se is probably worth a book. When designing the chapters, we select those topics which are either classical (e.g. statistics, linear algebra) or popular and proven-to-be-effective in industry (e.g. deep neural network, probabilistic programming, etc.). We strive to reach a good balance between breadth and depth. For each topic, we will try our best to list sufficient references to guide our readers to study further.
-Unlike other data science books, this book can serve as a reference for other software architects building modern numerical software systems. A significant part of this book is dedicated to explaining the underlying details of Owl. Not only will we give you a bird’s-eye-view of the overall Owl system, but also teach you how to build the system up and optimise each component step-by-step. If you use Owl to build applications, this book can serve as a useful reference manual as well.
-
-
-Structure of the Book
-The book is divided into three parts, and each part focuses on different areas.
-Part I first introduces the basics of the Owl system and important conventions to help you in studying how to program with Owl. It then explores various topics in scientific computing, from the classic mathematics, statistics, linear algebra, algorithmic differentiation, optimisation, regression to the popular deep neural network, natural language processing, probabilistic programming, etc. The chapters are loosely organised based on their dependency, e.g. you need to know optimisation before studying regression and deep neural networks.
-Part II is dedicated to presenting the architecture of the Owl system. We will dive into each core component and show how we build and optimise the software. By so doing, you will gain a thorough understanding on how a modern numerical system can be structured and developed, and what are the key components needed in such a complex system. Note that even though Owl is developed in OCaml, the knowledge you learnt in this part can be extrapolated to another language.
-Part III is a collection of case studies. This part might be the most interesting one for data scientists and practitioners. We will demonstrate how you can build a complete numerical application quickly from scratch using Owl. The cases include computer vision, recommender systems, financial technology, etc.
-The book does not enforce any strict order in reading, you can simply jump to the topic that interests you most. If you are completely new to the Owl system, we still strongly recommend you to start with the first two chapters of the book so that you know how to set up a working environment and start programming. All the code snippets included in this book can be compiled with the most recent master branch of Owl, our tooling guarantees the book material stay up-to-date with the software.
-
-
-Installation
-That being said, there is a long way to go from simple math calculation to those large use cases. Now let’s start from the very first step: installing Owl. Owl requires OCaml version >=4.10.0. Please make sure you have a working OCaml environment before you start installing Owl. You can read the guide on how to Install OCaml.
-Owl’s installation is rather trivial. There are four possible ways as shown below, from the most straightforward one to the least one.
-
-Option 1: Install from OPAM
-Thanks to the folks in OCaml Labs, OPAM makes package management in OCaml much easier than before. You can simply type the following the command lines to install.
-
-There is a known issue when installing Owl on ubuntu-based distribution. The reason is that the binary distribution of BLAS and LAPACK are outdated and failed to provide all the interfaces Owl requires. You will need to compile openblas manually, and use the appropriate environment variables to point at your newly compiled library. You can use `owl’s docker file as a reference for this issue.
-This way of installation pulls in the most recent Owl released on OPAM. Owl does not have a fixed release schedule. We usually make a new release whenever there are enough changes accumulated or a significant feature implemented. If you want to try the newest development features, we recommend the other ways to install Owl, as below.
-
-
-Option 2: Pull from Docker Hub
-Owl’s docker images are synchronised with the master branch. The image is always automatically built whenever there are new commits. You can check the building history on Docker Hub.
-You only need to pull the image then start a container.
-
-
- docker pull owlbarn/owl
- docker run -t -i owlbarn/owl
-
-
Besides the complete Owl system, the docker image also contains an enhanced OCaml toplevel - utop. You can start utop in the container and try out some examples. The source code of Owl is stored in /root/owl directory. You can modify the source code and rebuild the system directly in the started container. There are Owl docker images on various Linux distributions, this can be further specified using tags, e.g. docker pull owlbarn/owl:alpine.
-
-
-Option 3: Pin the Dev-Repo
-opam pin allows you to pin the local code to Owl’s development repository on Github. The first command opam depext installs all the dependencies Owl needs.
-
-
- opam depext owl
- opam pin add owl --dev-repo
-
-
Option 4: Compile from Source
-Compiling directly from the source is an old-school but a recommended option. First, you need to clone the repository.
-
-
- git clone git@github.com:owlbarn/owl.git
-
-
Second, you need to figure out the missing dependencies and install them.
-
-
- dune external-lib-deps --missing @install @runtest
-
-
Last, this is perhaps the most classic step.
-
-
- make && make install
-
-
If your OPAM is older than V2 beta4, you need one extra step. This is due to a bug in OPAM which copies the compiled library into /.opam/4.06.0/lib/stubslibs rather than /.opam/4.06.0/lib/stublibs. If you don’t want to upgrade OPAM, then you need to manually move dllowl_stubs.so file from stubslib to stublib folder, then everything should work. However, if you have the most recent OPAM installed, this will not be your concern.
-
-
-CBLAS/LAPACKE Dependency
-The most important dependency of Owl is the OpenBLAS library, which efficiently implement the BLAS and LAPACK linear algebra routines. Linking to the correct OpenBLAS is the key to achieve the best performance. Depending on the specific platform, you can use yum, apt-get, brew to install the binary format. For example on my Mac OSX, the installation looks like this:
-
-
- brew install homebrew/science/openblas
-
-
However, installing from OpenBLAS source code give us extra benefits. First, it implements the most recent interfaces comparing to the outdated binary distribution offered by the native package management tool. Second, it leads to way better performance because OpenBLAS tunes many parameters based on your system configuration and architecture to generate the most optimised binary code.
-OpenBLAS already contains an implementation of LAPACKE, as long as you have a Fortran complier installed on your computer, the LAPACKE will be compiled and included in the installation automatically.
-
-
-
-Interacting with Owl
-There are several ways to interact with Owl system. The classic one is to write an OCaml application, compile the code, link to Owl system, then run it natively on a computer. You can also skip the compilation and linking step, and use Zoo system in Owl to run the code as a script.
-However, the easiest way for a beginner to try out Owl is using REPL (Read–Eval–Print Loop), namely an interactive toplevel such as that of Python. The toplevel offers a convenient way to play with small code snippets. The code run in the toplevel is compiled into bytecode rather than native code. Bytecode often runs much slower than native code. However, this has very little impact on Owl’s performance because all its performance-critical functions are implemented in C language.
-OCaml code can be compiled in either bytecode or native code. The bytecode is executed on OCaml virtual machine which is less performant then platform-optimised native code. Toplevel runs the user code in bytecode mode, but this has little impact on Owl’s performance because its core functions are implemented in C language. It is hard to notice any performance degradation if you run Owl in a script. In the following, we will introduce two options to set up an interactive environment for Owl.
-
-Using Toplevel
-OCaml language has bundled with a simple toplevel, but I recommend utop as a more advance replacement. Installing utop is straightforward using OPAM, simply run the following command in the system shell.
-
-
- opam install utop
-
-
After installation, you can load Owl in utop with the following commands. owl-top is Owl’s toplevel library which will automatically load several related libraries (including owl-zoo, owl-base, and owl core library) to set up a complete numerical environment.
-
-
#require "owl-top"
- open Owl
-
-
If you do not want to type these commands every time you start toplevel, you can add them to .ocamlinit file. The toplevel reads .ocamlinit file to initialise the environment during the startup. This file is often stored in the home directory on your computer.
-
-
-Using Notebook
-Jupyter Notebook is a popular way to mix presentation with interactive code execution. It originates from Python world and is widely supported by various languages. One attractive feature of notebook is that it uses client/server architecture and runs in a browser.
-If you want to know how to use a notebook and its technical details, please read Jupyter Documentation. Here let me show you how to set up a notebook to run Owl step by step.
-Run the following commands in the shell will install all the dependency for you. This includes Jupyter Notebook and its OCaml language extension.
-
-
- pip install jupyter
- opam install jupyter
- jupyter kernelspec install --name ocaml-jupyter "$(opam config var share)/jupyter"
-
-
To start a Jupyter notebook, you can run this command. The command starts a local server running on http://127.0.0.1:8888/, then opens a tab in your browser as the client.
-
-If you wish to run a notebook server remotely, please refer to “Running a notebook server” for more information. To set up a server for multiple users, which is especially useful for educational purpose, please consult to JupyterHub system.
-When everything is up and running, you can start a new notebook in the web interface. In the new notebook, you must run the following OCaml code in the first input field to load Owl environment.
-
-
#use "topfind"
-#require "owl-top, jupyter.notebook"
-
-
At this point, a complete Owl environment is set up in the Jupyter Notebook, and you are free to go with any experiments you like. For example, you can simply copy & paste the whole lazy_mnist.ml to train a convolutional neural network in the notebook. But here, let us just use the following code.
-
-
#use "topfind"
-#require "owl-top, jupyter.notebook"
-open Owl
-open Neural.S
-open Neural.S.Graph
-open Neural.S.Algodiff
-let make_network input_shape =
- input input_shape
- |> lambda (fun x -> Maths.(x / F 256.))
- |> conv2d [|5;5;1;32|] [|1;1|] ~act_typ:Activation.Relu
- |> max_pool2d [|2;2|] [|2;2|]
- |> dropout 0.1
- |> fully_connected 1024 ~act_typ:Activation.Relu
- |> linear 10 ~act_typ:Activation.(Softmax 1)
- |> get_network
->val make_network : int array -> network = <fun>
-
-
The make_network function defines the structure of a convolution neural network. By passing the shape of input data, Owl automatically infers the shape of whole network, and prints out the summary of network structure nicely on the screen.
-
-
make_network [|28;28;1|]
->- : network =
->18839
->
->[ Node input_0 ]:
-> Input : in/out:[*,28,28,1]
-> prev:[] next:[lambda_1]
->
->[ Node lambda_1 ]:
-> Lambda : in:[*,28,28,1] out:[*,28,28,1]
-> customised f : t -> t
-> prev:[input_0] next:[conv2d_2]
->
->[ Node conv2d_2 ]:
-> Conv2D : tensor in:[*;28,28,1] out:[*,28,28,32]
-> init : tanh
-> params : 832
-> kernel : 5 x 5 x 1 x 32
-> b : 32
-> stride : [1; 1]
-> prev:[lambda_1] next:[activation_3]
->
->[ Node activation_3 ]:
-> Activation : relu in/out:[*,28,28,32]
-> prev:[conv2d_2] next:[maxpool2d_4]
->
->[ Node maxpool2d_4 ]:
-> MaxPool2D : tensor in:[*,28,28,32] out:[*,14,14,32]
-> padding : SAME
-> kernel : [2; 2]
-> stride : [2; 2]
-> prev:[activation_3] next:[dropout_5]
->
->[ Node dropout_5 ]:
-> Dropout : in:[*,14,14,32] out:[*,14,14,32]
-> rate : 0.1
-> prev:[maxpool2d_4] next:[fullyconnected_6]
->
->[ Node fullyconnected_6 ]:
-> FullyConnected : tensor in:[*,14,14,32] matrix out:(*,1024)
-> init : standard
-> params : 6423552
-> w : 6272 x 1024
-> b : 1 x 1024
-> prev:[dropout_5] next:[activation_7]
->
->[ Node activation_7 ]:
-> Activation : relu in/out:[*,1024]
-> prev:[fullyconnected_6] next:[linear_8]
->
->[ Node linear_8 ]:
-> Linear : matrix in:(*,1024) out:(*,10)
-> init : standard
-> params : 10250
-> w : 1024 x 10
-> b : 1 x 10
-> prev:[activation_7] next:[activation_9]
->
->[ Node activation_9 ]:
-> Activation : softmax 1 in/out:[*,10]
-> prev:[linear_8] next:[]
->
-
-
The Second example demonstrates how to plot figures in notebook. Because Owl’s Plot module does not support in-memory plotting, the figure needs to be written into a file first before passing to Jupyter_notebook.display_file to render.
-
-
#use "topfind"
-#require "owl-top, owl-plplot, jupyter.notebook"
-open Owl
-open Owl_plplot
-let f x = Maths.sin x /. x in
-let h = Plot.create "plot_00.png" in
-Plot.set_title h "Function: f(x) = sine x / x";
-Plot.set_xlabel h "x-axis";
-Plot.set_ylabel h "y-axis";
-Plot.set_font_size h 8.;
-Plot.set_pen_size h 3.;
-Plot.plot_fun ~h f 1. 15.;
-Plot.output h
->- : unit = ()
-
-
To load the image into browser, we need to call the Jupyter_notebook.display_file function. Then we can see the plot [@fig:introduction:example00] is correctly rendered in the notebook running in your browser. Plotting capability greatly enriches the content of an interactive presentation.
-
-
Jupyter_notebook.display_file ~base64:true "image/png" "plot_00.png"
-
 Plot example using Owl Notebook
-
-
Plot example using Owl Notebook
-
-Even though the extra call to display_file is not ideal, it is obvious that the tooling in OCaml ecosystem has been moving forward quickly. I believe we will soon have even better and more convenient tools for interactive data analytical applications.
-
-
-Using Owl-Jupyter
-For the time being, if you want to save that extra line to display a image in Jupyter. There is a convenient module called owl-jupyter. Owl-jupyter module overloads the original Plot.output function so that a plotted figure can be directly shown on the page.
-
-
-# #use "topfind"
-# #require "owl-jupyter"
-# open Owl_jupyter
-
-# let f x = Maths.sin x /. x in
- let h = Plot.create "plot_01.png" in
- Plot.set_title h "Function: f(x) = sine x / x";
- Plot.set_xlabel h "x-axis";
- Plot.set_ylabel h "y-axis";
- Plot.set_font_size h 8.;
- Plot.set_pen_size h 3.;
- Plot.plot_fun ~h f 1. 15.;
- Plot.output h
-- : unit = ()
-
-
 Plot example using Owl-Jupyter
-
-
Plot example using Owl-Jupyter
-
-From the example above, you can see Owl users’ experience can be significantly improved by using the notebook.
-
-
-
-Summary
-In this chapter we give an brief introduction to the background of Owl, including scientific computing, functional programming, and target audience, and the layout of this book. Then we start introduces how Owl can be installed and used, as a first step to start this journey. You can feel free to browse any part of this book as you want.
-At this point you have installed a working environment of Owl on your computer, you should feel really proud of yourself. To be honest, this can be the most challengening part for a new user, even though Owl team has spent tons of time in improving its compilation and intallation. Now, let’s roll out and start the exploration of more interesting topics.
-
-
- Next: Chapter 02Conventions
\ No newline at end of file
diff --git a/docs/js/_functions.js b/docs/js/_functions.js
deleted file mode 100644
index 3de5684..0000000
--- a/docs/js/_functions.js
+++ /dev/null
@@ -1,30 +0,0 @@
-// http://paulirish.com/2011/requestanimationframe-for-smart-animating/
-// http://my.opera.com/emoller/blog/2011/12/20/requestanimationframe-for-smart-er-animating
-
-// requestAnimationFrame polyfill by Erik Möller
-// fixes from Paul Irish and Tino Zijdel
-
-(function() {
- var lastTime = 0;
- var vendors = ['ms', 'moz', 'webkit', 'o'];
- for(var x = 0; x < vendors.length && !window.requestAnimationFrame; ++x) {
- window.requestAnimationFrame = window[vendors[x]+'RequestAnimationFrame'];
- window.cancelAnimationFrame = window[vendors[x]+'CancelAnimationFrame']
- || window[vendors[x]+'CancelRequestAnimationFrame'];
- }
-
- if (!window.requestAnimationFrame)
- window.requestAnimationFrame = function(callback, element) {
- var currTime = new Date().getTime();
- var timeToCall = Math.max(0, 16 - (currTime - lastTime));
- var id = window.setTimeout(function() { callback(currTime + timeToCall); },
- timeToCall);
- lastTime = currTime + timeToCall;
- return id;
- };
-
- if (!window.cancelAnimationFrame)
- window.cancelAnimationFrame = function(id) {
- clearTimeout(id);
- };
-}());
\ No newline at end of file
diff --git a/docs/js/app.js b/docs/js/app.js
deleted file mode 100644
index c608422..0000000
--- a/docs/js/app.js
+++ /dev/null
@@ -1,154 +0,0 @@
-$(document).foundation();
-
-var isScrolled = false, $sn = $('.left-column'), snTop, snInHeight, snScroll = 0;
-var $snSide = $('.main-body'), wS = 0, wD = true, ww = $(window).width(), wh = $(window).height();
-
-function checkScroll() {
- if (isScrolled)
- {
- if ($sn)
- {
- if (snTop < wS && $snSide.offset().top + $snSide.outerHeight() > wS + wh)
- {
- $sn.css('min-height', '');
- if (!$sn.hasClass('true-fixed'))
- {
- $sn.addClass('true-fixed').removeClass('top bottom');
- }
-
- if ($sn.scrollTop() > wS - $snSide.offset().top && !wD)
- {
- snScroll = wS - $snSide.offset().top;
- }
- else if ($sn.scrollTop() < wS - $snSide.offset().top - $snSide.outerHeight() + snInHeight && wD)
- {
- snScroll = wS - $snSide.offset().top - $snSide.outerHeight() + snInHeight;
- }
- $sn.scrollTop(snScroll);
-
- }
- else
- {
- $sn.removeClass('true-fixed');
-
- if ($snSide.offset().top + $snSide.outerHeight() > wS + wh)
- {
- $sn.addClass('top').removeClass('bottom');
- snScroll = 0;
- }
- else
- {
- $sn.addClass('bottom').removeClass('top');
- $sn.css('min-height', wh);
- snScroll = snInHeight - $(window).height();
- }
-
- }
- }
- isScrolled = false;
- }
- window.requestAnimationFrame(checkScroll);
-}
-
-$(document).ready(function(){
- if ($('section').length > 0)
- {
- $('section').scrollNav({
- sections: 'section>h2',
- subSections: 'section',
- sectionElem: 'div',
- insertTarget: $('.left-column').get(0),
- insertLocation: 'prependTo',
- fixedMargin: 1000,
- showHeadline: false,
- scrollToHash: false,
- showTopLink: false
- });
- }
-
- if ($('.toc').length > 0)
- {
- $('.toc .children').slideUp(0).before($('+'));
- $('.toc i').on('click', function(e){
- e.preventDefault();
- e.stopPropagation();
- if (e.altKey || e.ctrlKey || e.metaKey)
- {
- if ($(this).hasClass('on'))
- {
- $('.toc i').removeClass('on').next().slideUp();
- }
- else
- {
- $('.toc i').addClass('on').next().slideDown();
- }
- }
- else
- {
- $(this).toggleClass('on').next().slideToggle();
- }
- });
- }
-
- if ($('.toc-full').length > 0)
- {
- $('.main-body').scrollNav({
- sections: '.part-link',
- subSections: '.toc-full>li',
- sectionElem: 'div',
- insertTarget: $('.left-column').get(0),
- insertLocation: 'prependTo',
- fixedMargin: 1000,
- showHeadline: false,
- scrollToHash: false,
- showTopLink: false
- });
- }
-
- if ($sn)
- {
- snTop = $sn.offset().top;
- snInHeight = $sn.outerHeight();
-
- isScrolled = true;
- checkScroll();
- }
-});
-
-$(window).load(function(){
- if ($sn)
- {
- $sn.removeClass('true-fixed');
- snTop = $sn.offset().top;
- }
-});
-
-$(window).scroll(function(){
- isScrolled = true;
- wD = $(window).scrollTop() > wS;
- wS = $(window).scrollTop();
-});
-
-$sn.scroll(function(){
- if ($sn && $sn.hasClass('true-fixed'))
- {
- snScroll = $(this).scrollTop();
- }
-});
-
-$(window).resize(function(){
- ww = $(window).width();
- wh = $(window).height();
- if ($sn)
- {
- isScrolled = false;
- $sn.removeClass('true-fixed').addClass('top').removeClass('bottom');
- snTop = $sn.offset().top;
- snInHeight = $sn.outerHeight();
- if ($sn.hasClass('bottom') && false)
- {
- snScroll = snInHeight - $(window).height();
- }
- }
- isScrolled = true;
-});
diff --git a/docs/js/discourse.js b/docs/js/discourse.js
deleted file mode 100644
index 958d94b..0000000
--- a/docs/js/discourse.js
+++ /dev/null
@@ -1,247 +0,0 @@
-function createDOMElement(opt) {
- var el = document.createElement(opt.element || 'div');
- el.className = opt.className || '';
- el.id = opt.id || '';
- el.href = opt.href || '';
- for (var key in opt.style) {
- el.style[key] = opt.style[key];
- }
- for (var i = 0, l = opt.children ? opt.children.length : 0; i < l; i++) {
- el.appendChild(opt.children[i]);
- }
- if (opt.onClick) {
- el.addEventListener('click', opt.onClick, true);
- }
- return el;
-};
-
-function div(opt) {
- return createDOMElement(opt);
-};
-
-function br() {
- return createDOMElement({element: 'br'});
-}
-
-function a(opt) {
- opt.element = 'a';
- return createDOMElement(opt);
-};
-
-function text(text) {
- return document.createTextNode(text);
-}
-
-var expanded = false;
-var discourseDiv = div({
- className: 'comments',
- id: 'discourse-comments',
- style: {
- position: 'fixed',
- backgroundColor: 'white',
- right: 0,
- top: 0,
- bottom: 0,
- borderLeft: 'solid 1px black',
- fontFamily: '"Opan Sans", "Helvetica Neue", Helvetica, Roboto, Arial, sans-serif',
- height: '100%',
- width: '400px',
- transition: '.4s linear',
- right: '-400px',
- zIndex: 10
- },
- children: [
- div({
- style: {
- fontWeight: '400',
- padding: '10px',
- backgroundColor: '#ffffa7',
- marginBottom: '10px',
- textAlign: 'center',
- fontSize: '14px',
- lineHeight: '18px'
- },
- children: [
- text(
- "Note: Discourse is intended for general discussion of the chapter. " +
- "For other things like typo's we encourage you to make "
- ),
- a({
- href:"https://github.com/owlbarn/book/issues",
- children: [
- text("an issue on GitHub")
- ]
- }),
- text("."),
- br(),
- br(),
- text("When giving feedback please quote the paragraph.")
- ]
- }),
- div({
- style: {
- position: 'absolute',
- backgroundColor: '#8e44ad',
- color: 'white',
- width: '107px',
- height: '26px',
- left: '-67px',
- top: '46px',
- transform: 'rotate(270deg)',
- textAlign: 'center',
-
- cursor: 'pointer'
- },
- onClick: function(e) {
- if (!expanded) {
- e.target.parentNode.style.right = 0;
- expanded = true;
- }
- else {
- e.target.parentNode.style.right = '-400px';
- expanded = false;
- }
- },
- children: [
- text("Feedback")
- ]
- })
- ]
-});
-
-document.body.appendChild(discourseDiv);
-
-
-let topic = -1;
-var loc = location.pathname;
-
-var urlTopicMap = {
- '/00-prologue.html': 579,
- '/01-guided-tour.html': 580,
- '/02-variables-and-functions.html': 581,
- '/03-lists-and-patterns.html': 582,
- '/04-files-modules-and-programs.html': 583,
- '/05-records.html': 584,
- '/06-guided-tour.html': 585,
- '/07-guided-tour.html': 586,
- '/08-imperative-programming.html': 587,
- '/09-functors.html': 588,
- '/10-first-class-modules.html': 589,
- '/11-objects.html': 590,
- '/12-classes.html': 591,
- '/13-maps-and-hashtables.html': 592,
- '/14-command-line-parsing.html': 593,
- '/15-json.html': 594,
- '/16-parsing-with-ocamllex-and-menhir.html': 595,
- '/17-data-serialization.html': 596,
- '/18-concurrent-programming.html': 597,
- '/19-foreign-function-interface.html': 598,
- '/20-runtime-memory-layout.html': 702,
- '/21-garbage-collector.html': 703,
- '/22-compiler-frontend.html': 704,
- '/23-compiler-backend.html': 705,
- '/faqs.html': 708,
- '': 706,
- '/': 706,
- '/index.html': 706,
- '/install.html': 709,
- '/toc.html': 707
-};
-
-console.info(urlTopicMap[loc]);
-
-DiscourseEmbed = { discourseUrl: 'https://discuss.ocaml.org/',
- topicId: urlTopicMap[loc] };
-
-(function() {
-
- var DE = window.DiscourseEmbed || {};
- var comments = document.getElementById('discourse-comments');
- var iframe = document.createElement('iframe');
-
- ['discourseUrl', 'discourseEmbedUrl', 'discourseUserName'].forEach(function(i) {
- if (window[i]) { DE[i] = DE[i] || window[i]; }
- });
-
- var queryParams = {};
-
- if (DE.discourseEmbedUrl) {
- if (DE.discourseEmbedUrl.indexOf('/') === 0) {
- console.error("discourseEmbedUrl must be a full URL, not a relative path");
- }
-
- queryParams.embed_url = encodeURIComponent(DE.discourseEmbedUrl);
- }
-
- if (DE.discourseUserName) {
- queryParams.discourse_username = DE.discourseUserName;
- }
-
- if (DE.topicId) {
- queryParams.topic_id = DE.topicId;
- }
-
- var src = DE.discourseUrl + 'embed/comments';
- var keys = Object.keys(queryParams);
- if (keys.length > 0) {
- src += "?";
-
- for (var i=0; i 0) { src += "&"; }
-
- var k = keys[i];
- src += k + "=" + queryParams[k];
- }
- }
-
- iframe.src = src;
- iframe.id = 'discourse-embed-frame';
- iframe.width = "100%";
- iframe.frameBorder = "0";
- iframe.scrolling = "no";
- comments.appendChild(iframe);
-
- // Thanks http://amendsoft-javascript.blogspot.ca/2010/04/find-x-and-y-coordinate-of-html-control.html
- function findPosY(obj)
- {
- var top = 0;
- if(obj.offsetParent)
- {
- while(1)
- {
- top += obj.offsetTop;
- if(!obj.offsetParent)
- break;
- obj = obj.offsetParent;
- }
- }
- else if(obj.y)
- {
- top += obj.y;
- }
- return top;
- }
-
- function normalizeUrl(url) {
- return url.toLowerCase().replace(/^https?(\:\/\/)?/, '');
- }
-
- function postMessageReceived(e) {
- if (!e) { return; }
- if (normalizeUrl(DE.discourseUrl).indexOf(normalizeUrl(e.origin)) === -1) { return; }
-
- if (e.data) {
- if (e.data.type === 'discourse-resize' && e.data.height) {
- iframe.height = '100%';
- }
-
- if (e.data.type === 'discourse-scroll' && e.data.top) {
- // find iframe offset
- var destY = findPosY(iframe) + e.data.top;
- window.scrollTo(0, destY);
- }
- }
- }
- window.addEventListener('message', postMessageReceived, false);
-
-})();
diff --git a/docs/js/jquery.min.js b/docs/js/jquery.min.js
deleted file mode 100644
index 18bdbed..0000000
--- a/docs/js/jquery.min.js
+++ /dev/null
@@ -1,5 +0,0 @@
-/*! jQuery v2.1.3 | (c) 2005, 2014 jQuery Foundation, Inc. | jquery.org/license */
-!function(a,b){"object"==typeof module&&"object"==typeof module.exports?module.exports=a.document?b(a,!0):function(a){if(!a.document)throw new Error("jQuery requires a window with a document");return b(a)}:b(a)}("undefined"!=typeof window?window:this,function(a,b){var c=[],d=c.slice,e=c.concat,f=c.push,g=c.indexOf,h={},i=h.toString,j=h.hasOwnProperty,k={},l=a.document,m="2.1.3",n=function(a,b){return new n.fn.init(a,b)},o=/^[\s\uFEFF\xA0]+|[\s\uFEFF\xA0]+$/g,p=/^-ms-/,q=/-([\da-z])/gi,r=function(a,b){return b.toUpperCase()};n.fn=n.prototype={jquery:m,constructor:n,selector:"",length:0,toArray:function(){return d.call(this)},get:function(a){return null!=a?0>a?this[a+this.length]:this[a]:d.call(this)},pushStack:function(a){var b=n.merge(this.constructor(),a);return b.prevObject=this,b.context=this.context,b},each:function(a,b){return n.each(this,a,b)},map:function(a){return this.pushStack(n.map(this,function(b,c){return a.call(b,c,b)}))},slice:function(){return this.pushStack(d.apply(this,arguments))},first:function(){return this.eq(0)},last:function(){return this.eq(-1)},eq:function(a){var b=this.length,c=+a+(0>a?b:0);return this.pushStack(c>=0&&b>c?[this[c]]:[])},end:function(){return this.prevObject||this.constructor(null)},push:f,sort:c.sort,splice:c.splice},n.extend=n.fn.extend=function(){var a,b,c,d,e,f,g=arguments[0]||{},h=1,i=arguments.length,j=!1;for("boolean"==typeof g&&(j=g,g=arguments[h]||{},h++),"object"==typeof g||n.isFunction(g)||(g={}),h===i&&(g=this,h--);i>h;h++)if(null!=(a=arguments[h]))for(b in a)c=g[b],d=a[b],g!==d&&(j&&d&&(n.isPlainObject(d)||(e=n.isArray(d)))?(e?(e=!1,f=c&&n.isArray(c)?c:[]):f=c&&n.isPlainObject(c)?c:{},g[b]=n.extend(j,f,d)):void 0!==d&&(g[b]=d));return g},n.extend({expando:"jQuery"+(m+Math.random()).replace(/\D/g,""),isReady:!0,error:function(a){throw new Error(a)},noop:function(){},isFunction:function(a){return"function"===n.type(a)},isArray:Array.isArray,isWindow:function(a){return null!=a&&a===a.window},isNumeric:function(a){return!n.isArray(a)&&a-parseFloat(a)+1>=0},isPlainObject:function(a){return"object"!==n.type(a)||a.nodeType||n.isWindow(a)?!1:a.constructor&&!j.call(a.constructor.prototype,"isPrototypeOf")?!1:!0},isEmptyObject:function(a){var b;for(b in a)return!1;return!0},type:function(a){return null==a?a+"":"object"==typeof a||"function"==typeof a?h[i.call(a)]||"object":typeof a},globalEval:function(a){var b,c=eval;a=n.trim(a),a&&(1===a.indexOf("use strict")?(b=l.createElement("script"),b.text=a,l.head.appendChild(b).parentNode.removeChild(b)):c(a))},camelCase:function(a){return a.replace(p,"ms-").replace(q,r)},nodeName:function(a,b){return a.nodeName&&a.nodeName.toLowerCase()===b.toLowerCase()},each:function(a,b,c){var d,e=0,f=a.length,g=s(a);if(c){if(g){for(;f>e;e++)if(d=b.apply(a[e],c),d===!1)break}else for(e in a)if(d=b.apply(a[e],c),d===!1)break}else if(g){for(;f>e;e++)if(d=b.call(a[e],e,a[e]),d===!1)break}else for(e in a)if(d=b.call(a[e],e,a[e]),d===!1)break;return a},trim:function(a){return null==a?"":(a+"").replace(o,"")},makeArray:function(a,b){var c=b||[];return null!=a&&(s(Object(a))?n.merge(c,"string"==typeof a?[a]:a):f.call(c,a)),c},inArray:function(a,b,c){return null==b?-1:g.call(b,a,c)},merge:function(a,b){for(var c=+b.length,d=0,e=a.length;c>d;d++)a[e++]=b[d];return a.length=e,a},grep:function(a,b,c){for(var d,e=[],f=0,g=a.length,h=!c;g>f;f++)d=!b(a[f],f),d!==h&&e.push(a[f]);return e},map:function(a,b,c){var d,f=0,g=a.length,h=s(a),i=[];if(h)for(;g>f;f++)d=b(a[f],f,c),null!=d&&i.push(d);else for(f in a)d=b(a[f],f,c),null!=d&&i.push(d);return e.apply([],i)},guid:1,proxy:function(a,b){var c,e,f;return"string"==typeof b&&(c=a[b],b=a,a=c),n.isFunction(a)?(e=d.call(arguments,2),f=function(){return a.apply(b||this,e.concat(d.call(arguments)))},f.guid=a.guid=a.guid||n.guid++,f):void 0},now:Date.now,support:k}),n.each("Boolean Number String Function Array Date RegExp Object Error".split(" "),function(a,b){h["[object "+b+"]"]=b.toLowerCase()});function s(a){var b=a.length,c=n.type(a);return"function"===c||n.isWindow(a)?!1:1===a.nodeType&&b?!0:"array"===c||0===b||"number"==typeof b&&b>0&&b-1 in a}var t=function(a){var b,c,d,e,f,g,h,i,j,k,l,m,n,o,p,q,r,s,t,u="sizzle"+1*new Date,v=a.document,w=0,x=0,y=hb(),z=hb(),A=hb(),B=function(a,b){return a===b&&(l=!0),0},C=1<<31,D={}.hasOwnProperty,E=[],F=E.pop,G=E.push,H=E.push,I=E.slice,J=function(a,b){for(var c=0,d=a.length;d>c;c++)if(a[c]===b)return c;return-1},K="checked|selected|async|autofocus|autoplay|controls|defer|disabled|hidden|ismap|loop|multiple|open|readonly|required|scoped",L="[\\x20\\t\\r\\n\\f]",M="(?:\\\\.|[\\w-]|[^\\x00-\\xa0])+",N=M.replace("w","w#"),O="\\["+L+"*("+M+")(?:"+L+"*([*^$|!~]?=)"+L+"*(?:'((?:\\\\.|[^\\\\'])*)'|\"((?:\\\\.|[^\\\\\"])*)\"|("+N+"))|)"+L+"*\\]",P=":("+M+")(?:\\((('((?:\\\\.|[^\\\\'])*)'|\"((?:\\\\.|[^\\\\\"])*)\")|((?:\\\\.|[^\\\\()[\\]]|"+O+")*)|.*)\\)|)",Q=new RegExp(L+"+","g"),R=new RegExp("^"+L+"+|((?:^|[^\\\\])(?:\\\\.)*)"+L+"+$","g"),S=new RegExp("^"+L+"*,"+L+"*"),T=new RegExp("^"+L+"*([>+~]|"+L+")"+L+"*"),U=new RegExp("="+L+"*([^\\]'\"]*?)"+L+"*\\]","g"),V=new RegExp(P),W=new RegExp("^"+N+"$"),X={ID:new RegExp("^#("+M+")"),CLASS:new RegExp("^\\.("+M+")"),TAG:new RegExp("^("+M.replace("w","w*")+")"),ATTR:new RegExp("^"+O),PSEUDO:new RegExp("^"+P),CHILD:new RegExp("^:(only|first|last|nth|nth-last)-(child|of-type)(?:\\("+L+"*(even|odd|(([+-]|)(\\d*)n|)"+L+"*(?:([+-]|)"+L+"*(\\d+)|))"+L+"*\\)|)","i"),bool:new RegExp("^(?:"+K+")$","i"),needsContext:new RegExp("^"+L+"*[>+~]|:(even|odd|eq|gt|lt|nth|first|last)(?:\\("+L+"*((?:-\\d)?\\d*)"+L+"*\\)|)(?=[^-]|$)","i")},Y=/^(?:input|select|textarea|button)$/i,Z=/^h\d$/i,$=/^[^{]+\{\s*\[native \w/,_=/^(?:#([\w-]+)|(\w+)|\.([\w-]+))$/,ab=/[+~]/,bb=/'|\\/g,cb=new RegExp("\\\\([\\da-f]{1,6}"+L+"?|("+L+")|.)","ig"),db=function(a,b,c){var d="0x"+b-65536;return d!==d||c?b:0>d?String.fromCharCode(d+65536):String.fromCharCode(d>>10|55296,1023&d|56320)},eb=function(){m()};try{H.apply(E=I.call(v.childNodes),v.childNodes),E[v.childNodes.length].nodeType}catch(fb){H={apply:E.length?function(a,b){G.apply(a,I.call(b))}:function(a,b){var c=a.length,d=0;while(a[c++]=b[d++]);a.length=c-1}}}function gb(a,b,d,e){var f,h,j,k,l,o,r,s,w,x;if((b?b.ownerDocument||b:v)!==n&&m(b),b=b||n,d=d||[],k=b.nodeType,"string"!=typeof a||!a||1!==k&&9!==k&&11!==k)return d;if(!e&&p){if(11!==k&&(f=_.exec(a)))if(j=f[1]){if(9===k){if(h=b.getElementById(j),!h||!h.parentNode)return d;if(h.id===j)return d.push(h),d}else if(b.ownerDocument&&(h=b.ownerDocument.getElementById(j))&&t(b,h)&&h.id===j)return d.push(h),d}else{if(f[2])return H.apply(d,b.getElementsByTagName(a)),d;if((j=f[3])&&c.getElementsByClassName)return H.apply(d,b.getElementsByClassName(j)),d}if(c.qsa&&(!q||!q.test(a))){if(s=r=u,w=b,x=1!==k&&a,1===k&&"object"!==b.nodeName.toLowerCase()){o=g(a),(r=b.getAttribute("id"))?s=r.replace(bb,"\\$&"):b.setAttribute("id",s),s="[id='"+s+"'] ",l=o.length;while(l--)o[l]=s+rb(o[l]);w=ab.test(a)&&pb(b.parentNode)||b,x=o.join(",")}if(x)try{return H.apply(d,w.querySelectorAll(x)),d}catch(y){}finally{r||b.removeAttribute("id")}}}return i(a.replace(R,"$1"),b,d,e)}function hb(){var a=[];function b(c,e){return a.push(c+" ")>d.cacheLength&&delete b[a.shift()],b[c+" "]=e}return b}function ib(a){return a[u]=!0,a}function jb(a){var b=n.createElement("div");try{return!!a(b)}catch(c){return!1}finally{b.parentNode&&b.parentNode.removeChild(b),b=null}}function kb(a,b){var c=a.split("|"),e=a.length;while(e--)d.attrHandle[c[e]]=b}function lb(a,b){var c=b&&a,d=c&&1===a.nodeType&&1===b.nodeType&&(~b.sourceIndex||C)-(~a.sourceIndex||C);if(d)return d;if(c)while(c=c.nextSibling)if(c===b)return-1;return a?1:-1}function mb(a){return function(b){var c=b.nodeName.toLowerCase();return"input"===c&&b.type===a}}function nb(a){return function(b){var c=b.nodeName.toLowerCase();return("input"===c||"button"===c)&&b.type===a}}function ob(a){return ib(function(b){return b=+b,ib(function(c,d){var e,f=a([],c.length,b),g=f.length;while(g--)c[e=f[g]]&&(c[e]=!(d[e]=c[e]))})})}function pb(a){return a&&"undefined"!=typeof a.getElementsByTagName&&a}c=gb.support={},f=gb.isXML=function(a){var b=a&&(a.ownerDocument||a).documentElement;return b?"HTML"!==b.nodeName:!1},m=gb.setDocument=function(a){var b,e,g=a?a.ownerDocument||a:v;return g!==n&&9===g.nodeType&&g.documentElement?(n=g,o=g.documentElement,e=g.defaultView,e&&e!==e.top&&(e.addEventListener?e.addEventListener("unload",eb,!1):e.attachEvent&&e.attachEvent("onunload",eb)),p=!f(g),c.attributes=jb(function(a){return a.className="i",!a.getAttribute("className")}),c.getElementsByTagName=jb(function(a){return a.appendChild(g.createComment("")),!a.getElementsByTagName("*").length}),c.getElementsByClassName=$.test(g.getElementsByClassName),c.getById=jb(function(a){return o.appendChild(a).id=u,!g.getElementsByName||!g.getElementsByName(u).length}),c.getById?(d.find.ID=function(a,b){if("undefined"!=typeof b.getElementById&&p){var c=b.getElementById(a);return c&&c.parentNode?[c]:[]}},d.filter.ID=function(a){var b=a.replace(cb,db);return function(a){return a.getAttribute("id")===b}}):(delete d.find.ID,d.filter.ID=function(a){var b=a.replace(cb,db);return function(a){var c="undefined"!=typeof a.getAttributeNode&&a.getAttributeNode("id");return c&&c.value===b}}),d.find.TAG=c.getElementsByTagName?function(a,b){return"undefined"!=typeof b.getElementsByTagName?b.getElementsByTagName(a):c.qsa?b.querySelectorAll(a):void 0}:function(a,b){var c,d=[],e=0,f=b.getElementsByTagName(a);if("*"===a){while(c=f[e++])1===c.nodeType&&d.push(c);return d}return f},d.find.CLASS=c.getElementsByClassName&&function(a,b){return p?b.getElementsByClassName(a):void 0},r=[],q=[],(c.qsa=$.test(g.querySelectorAll))&&(jb(function(a){o.appendChild(a).innerHTML="",a.querySelectorAll("[msallowcapture^='']").length&&q.push("[*^$]="+L+"*(?:''|\"\")"),a.querySelectorAll("[selected]").length||q.push("\\["+L+"*(?:value|"+K+")"),a.querySelectorAll("[id~="+u+"-]").length||q.push("~="),a.querySelectorAll(":checked").length||q.push(":checked"),a.querySelectorAll("a#"+u+"+*").length||q.push(".#.+[+~]")}),jb(function(a){var b=g.createElement("input");b.setAttribute("type","hidden"),a.appendChild(b).setAttribute("name","D"),a.querySelectorAll("[name=d]").length&&q.push("name"+L+"*[*^$|!~]?="),a.querySelectorAll(":enabled").length||q.push(":enabled",":disabled"),a.querySelectorAll("*,:x"),q.push(",.*:")})),(c.matchesSelector=$.test(s=o.matches||o.webkitMatchesSelector||o.mozMatchesSelector||o.oMatchesSelector||o.msMatchesSelector))&&jb(function(a){c.disconnectedMatch=s.call(a,"div"),s.call(a,"[s!='']:x"),r.push("!=",P)}),q=q.length&&new RegExp(q.join("|")),r=r.length&&new RegExp(r.join("|")),b=$.test(o.compareDocumentPosition),t=b||$.test(o.contains)?function(a,b){var c=9===a.nodeType?a.documentElement:a,d=b&&b.parentNode;return a===d||!(!d||1!==d.nodeType||!(c.contains?c.contains(d):a.compareDocumentPosition&&16&a.compareDocumentPosition(d)))}:function(a,b){if(b)while(b=b.parentNode)if(b===a)return!0;return!1},B=b?function(a,b){if(a===b)return l=!0,0;var d=!a.compareDocumentPosition-!b.compareDocumentPosition;return d?d:(d=(a.ownerDocument||a)===(b.ownerDocument||b)?a.compareDocumentPosition(b):1,1&d||!c.sortDetached&&b.compareDocumentPosition(a)===d?a===g||a.ownerDocument===v&&t(v,a)?-1:b===g||b.ownerDocument===v&&t(v,b)?1:k?J(k,a)-J(k,b):0:4&d?-1:1)}:function(a,b){if(a===b)return l=!0,0;var c,d=0,e=a.parentNode,f=b.parentNode,h=[a],i=[b];if(!e||!f)return a===g?-1:b===g?1:e?-1:f?1:k?J(k,a)-J(k,b):0;if(e===f)return lb(a,b);c=a;while(c=c.parentNode)h.unshift(c);c=b;while(c=c.parentNode)i.unshift(c);while(h[d]===i[d])d++;return d?lb(h[d],i[d]):h[d]===v?-1:i[d]===v?1:0},g):n},gb.matches=function(a,b){return gb(a,null,null,b)},gb.matchesSelector=function(a,b){if((a.ownerDocument||a)!==n&&m(a),b=b.replace(U,"='$1']"),!(!c.matchesSelector||!p||r&&r.test(b)||q&&q.test(b)))try{var d=s.call(a,b);if(d||c.disconnectedMatch||a.document&&11!==a.document.nodeType)return d}catch(e){}return gb(b,n,null,[a]).length>0},gb.contains=function(a,b){return(a.ownerDocument||a)!==n&&m(a),t(a,b)},gb.attr=function(a,b){(a.ownerDocument||a)!==n&&m(a);var e=d.attrHandle[b.toLowerCase()],f=e&&D.call(d.attrHandle,b.toLowerCase())?e(a,b,!p):void 0;return void 0!==f?f:c.attributes||!p?a.getAttribute(b):(f=a.getAttributeNode(b))&&f.specified?f.value:null},gb.error=function(a){throw new Error("Syntax error, unrecognized expression: "+a)},gb.uniqueSort=function(a){var b,d=[],e=0,f=0;if(l=!c.detectDuplicates,k=!c.sortStable&&a.slice(0),a.sort(B),l){while(b=a[f++])b===a[f]&&(e=d.push(f));while(e--)a.splice(d[e],1)}return k=null,a},e=gb.getText=function(a){var b,c="",d=0,f=a.nodeType;if(f){if(1===f||9===f||11===f){if("string"==typeof a.textContent)return a.textContent;for(a=a.firstChild;a;a=a.nextSibling)c+=e(a)}else if(3===f||4===f)return a.nodeValue}else while(b=a[d++])c+=e(b);return c},d=gb.selectors={cacheLength:50,createPseudo:ib,match:X,attrHandle:{},find:{},relative:{">":{dir:"parentNode",first:!0}," ":{dir:"parentNode"},"+":{dir:"previousSibling",first:!0},"~":{dir:"previousSibling"}},preFilter:{ATTR:function(a){return a[1]=a[1].replace(cb,db),a[3]=(a[3]||a[4]||a[5]||"").replace(cb,db),"~="===a[2]&&(a[3]=" "+a[3]+" "),a.slice(0,4)},CHILD:function(a){return a[1]=a[1].toLowerCase(),"nth"===a[1].slice(0,3)?(a[3]||gb.error(a[0]),a[4]=+(a[4]?a[5]+(a[6]||1):2*("even"===a[3]||"odd"===a[3])),a[5]=+(a[7]+a[8]||"odd"===a[3])):a[3]&&gb.error(a[0]),a},PSEUDO:function(a){var b,c=!a[6]&&a[2];return X.CHILD.test(a[0])?null:(a[3]?a[2]=a[4]||a[5]||"":c&&V.test(c)&&(b=g(c,!0))&&(b=c.indexOf(")",c.length-b)-c.length)&&(a[0]=a[0].slice(0,b),a[2]=c.slice(0,b)),a.slice(0,3))}},filter:{TAG:function(a){var b=a.replace(cb,db).toLowerCase();return"*"===a?function(){return!0}:function(a){return a.nodeName&&a.nodeName.toLowerCase()===b}},CLASS:function(a){var b=y[a+" "];return b||(b=new RegExp("(^|"+L+")"+a+"("+L+"|$)"))&&y(a,function(a){return b.test("string"==typeof a.className&&a.className||"undefined"!=typeof a.getAttribute&&a.getAttribute("class")||"")})},ATTR:function(a,b,c){return function(d){var e=gb.attr(d,a);return null==e?"!="===b:b?(e+="","="===b?e===c:"!="===b?e!==c:"^="===b?c&&0===e.indexOf(c):"*="===b?c&&e.indexOf(c)>-1:"$="===b?c&&e.slice(-c.length)===c:"~="===b?(" "+e.replace(Q," ")+" ").indexOf(c)>-1:"|="===b?e===c||e.slice(0,c.length+1)===c+"-":!1):!0}},CHILD:function(a,b,c,d,e){var f="nth"!==a.slice(0,3),g="last"!==a.slice(-4),h="of-type"===b;return 1===d&&0===e?function(a){return!!a.parentNode}:function(b,c,i){var j,k,l,m,n,o,p=f!==g?"nextSibling":"previousSibling",q=b.parentNode,r=h&&b.nodeName.toLowerCase(),s=!i&&!h;if(q){if(f){while(p){l=b;while(l=l[p])if(h?l.nodeName.toLowerCase()===r:1===l.nodeType)return!1;o=p="only"===a&&!o&&"nextSibling"}return!0}if(o=[g?q.firstChild:q.lastChild],g&&s){k=q[u]||(q[u]={}),j=k[a]||[],n=j[0]===w&&j[1],m=j[0]===w&&j[2],l=n&&q.childNodes[n];while(l=++n&&l&&l[p]||(m=n=0)||o.pop())if(1===l.nodeType&&++m&&l===b){k[a]=[w,n,m];break}}else if(s&&(j=(b[u]||(b[u]={}))[a])&&j[0]===w)m=j[1];else while(l=++n&&l&&l[p]||(m=n=0)||o.pop())if((h?l.nodeName.toLowerCase()===r:1===l.nodeType)&&++m&&(s&&((l[u]||(l[u]={}))[a]=[w,m]),l===b))break;return m-=e,m===d||m%d===0&&m/d>=0}}},PSEUDO:function(a,b){var c,e=d.pseudos[a]||d.setFilters[a.toLowerCase()]||gb.error("unsupported pseudo: "+a);return e[u]?e(b):e.length>1?(c=[a,a,"",b],d.setFilters.hasOwnProperty(a.toLowerCase())?ib(function(a,c){var d,f=e(a,b),g=f.length;while(g--)d=J(a,f[g]),a[d]=!(c[d]=f[g])}):function(a){return e(a,0,c)}):e}},pseudos:{not:ib(function(a){var b=[],c=[],d=h(a.replace(R,"$1"));return d[u]?ib(function(a,b,c,e){var f,g=d(a,null,e,[]),h=a.length;while(h--)(f=g[h])&&(a[h]=!(b[h]=f))}):function(a,e,f){return b[0]=a,d(b,null,f,c),b[0]=null,!c.pop()}}),has:ib(function(a){return function(b){return gb(a,b).length>0}}),contains:ib(function(a){return a=a.replace(cb,db),function(b){return(b.textContent||b.innerText||e(b)).indexOf(a)>-1}}),lang:ib(function(a){return W.test(a||"")||gb.error("unsupported lang: "+a),a=a.replace(cb,db).toLowerCase(),function(b){var c;do if(c=p?b.lang:b.getAttribute("xml:lang")||b.getAttribute("lang"))return c=c.toLowerCase(),c===a||0===c.indexOf(a+"-");while((b=b.parentNode)&&1===b.nodeType);return!1}}),target:function(b){var c=a.location&&a.location.hash;return c&&c.slice(1)===b.id},root:function(a){return a===o},focus:function(a){return a===n.activeElement&&(!n.hasFocus||n.hasFocus())&&!!(a.type||a.href||~a.tabIndex)},enabled:function(a){return a.disabled===!1},disabled:function(a){return a.disabled===!0},checked:function(a){var b=a.nodeName.toLowerCase();return"input"===b&&!!a.checked||"option"===b&&!!a.selected},selected:function(a){return a.parentNode&&a.parentNode.selectedIndex,a.selected===!0},empty:function(a){for(a=a.firstChild;a;a=a.nextSibling)if(a.nodeType<6)return!1;return!0},parent:function(a){return!d.pseudos.empty(a)},header:function(a){return Z.test(a.nodeName)},input:function(a){return Y.test(a.nodeName)},button:function(a){var b=a.nodeName.toLowerCase();return"input"===b&&"button"===a.type||"button"===b},text:function(a){var b;return"input"===a.nodeName.toLowerCase()&&"text"===a.type&&(null==(b=a.getAttribute("type"))||"text"===b.toLowerCase())},first:ob(function(){return[0]}),last:ob(function(a,b){return[b-1]}),eq:ob(function(a,b,c){return[0>c?c+b:c]}),even:ob(function(a,b){for(var c=0;b>c;c+=2)a.push(c);return a}),odd:ob(function(a,b){for(var c=1;b>c;c+=2)a.push(c);return a}),lt:ob(function(a,b,c){for(var d=0>c?c+b:c;--d>=0;)a.push(d);return a}),gt:ob(function(a,b,c){for(var d=0>c?c+b:c;++db;b++)d+=a[b].value;return d}function sb(a,b,c){var d=b.dir,e=c&&"parentNode"===d,f=x++;return b.first?function(b,c,f){while(b=b[d])if(1===b.nodeType||e)return a(b,c,f)}:function(b,c,g){var h,i,j=[w,f];if(g){while(b=b[d])if((1===b.nodeType||e)&&a(b,c,g))return!0}else while(b=b[d])if(1===b.nodeType||e){if(i=b[u]||(b[u]={}),(h=i[d])&&h[0]===w&&h[1]===f)return j[2]=h[2];if(i[d]=j,j[2]=a(b,c,g))return!0}}}function tb(a){return a.length>1?function(b,c,d){var e=a.length;while(e--)if(!a[e](b,c,d))return!1;return!0}:a[0]}function ub(a,b,c){for(var d=0,e=b.length;e>d;d++)gb(a,b[d],c);return c}function vb(a,b,c,d,e){for(var f,g=[],h=0,i=a.length,j=null!=b;i>h;h++)(f=a[h])&&(!c||c(f,d,e))&&(g.push(f),j&&b.push(h));return g}function wb(a,b,c,d,e,f){return d&&!d[u]&&(d=wb(d)),e&&!e[u]&&(e=wb(e,f)),ib(function(f,g,h,i){var j,k,l,m=[],n=[],o=g.length,p=f||ub(b||"*",h.nodeType?[h]:h,[]),q=!a||!f&&b?p:vb(p,m,a,h,i),r=c?e||(f?a:o||d)?[]:g:q;if(c&&c(q,r,h,i),d){j=vb(r,n),d(j,[],h,i),k=j.length;while(k--)(l=j[k])&&(r[n[k]]=!(q[n[k]]=l))}if(f){if(e||a){if(e){j=[],k=r.length;while(k--)(l=r[k])&&j.push(q[k]=l);e(null,r=[],j,i)}k=r.length;while(k--)(l=r[k])&&(j=e?J(f,l):m[k])>-1&&(f[j]=!(g[j]=l))}}else r=vb(r===g?r.splice(o,r.length):r),e?e(null,g,r,i):H.apply(g,r)})}function xb(a){for(var b,c,e,f=a.length,g=d.relative[a[0].type],h=g||d.relative[" "],i=g?1:0,k=sb(function(a){return a===b},h,!0),l=sb(function(a){return J(b,a)>-1},h,!0),m=[function(a,c,d){var e=!g&&(d||c!==j)||((b=c).nodeType?k(a,c,d):l(a,c,d));return b=null,e}];f>i;i++)if(c=d.relative[a[i].type])m=[sb(tb(m),c)];else{if(c=d.filter[a[i].type].apply(null,a[i].matches),c[u]){for(e=++i;f>e;e++)if(d.relative[a[e].type])break;return wb(i>1&&tb(m),i>1&&rb(a.slice(0,i-1).concat({value:" "===a[i-2].type?"*":""})).replace(R,"$1"),c,e>i&&xb(a.slice(i,e)),f>e&&xb(a=a.slice(e)),f>e&&rb(a))}m.push(c)}return tb(m)}function yb(a,b){var c=b.length>0,e=a.length>0,f=function(f,g,h,i,k){var l,m,o,p=0,q="0",r=f&&[],s=[],t=j,u=f||e&&d.find.TAG("*",k),v=w+=null==t?1:Math.random()||.1,x=u.length;for(k&&(j=g!==n&&g);q!==x&&null!=(l=u[q]);q++){if(e&&l){m=0;while(o=a[m++])if(o(l,g,h)){i.push(l);break}k&&(w=v)}c&&((l=!o&&l)&&p--,f&&r.push(l))}if(p+=q,c&&q!==p){m=0;while(o=b[m++])o(r,s,g,h);if(f){if(p>0)while(q--)r[q]||s[q]||(s[q]=F.call(i));s=vb(s)}H.apply(i,s),k&&!f&&s.length>0&&p+b.length>1&&gb.uniqueSort(i)}return k&&(w=v,j=t),r};return c?ib(f):f}return h=gb.compile=function(a,b){var c,d=[],e=[],f=A[a+" "];if(!f){b||(b=g(a)),c=b.length;while(c--)f=xb(b[c]),f[u]?d.push(f):e.push(f);f=A(a,yb(e,d)),f.selector=a}return f},i=gb.select=function(a,b,e,f){var i,j,k,l,m,n="function"==typeof a&&a,o=!f&&g(a=n.selector||a);if(e=e||[],1===o.length){if(j=o[0]=o[0].slice(0),j.length>2&&"ID"===(k=j[0]).type&&c.getById&&9===b.nodeType&&p&&d.relative[j[1].type]){if(b=(d.find.ID(k.matches[0].replace(cb,db),b)||[])[0],!b)return e;n&&(b=b.parentNode),a=a.slice(j.shift().value.length)}i=X.needsContext.test(a)?0:j.length;while(i--){if(k=j[i],d.relative[l=k.type])break;if((m=d.find[l])&&(f=m(k.matches[0].replace(cb,db),ab.test(j[0].type)&&pb(b.parentNode)||b))){if(j.splice(i,1),a=f.length&&rb(j),!a)return H.apply(e,f),e;break}}}return(n||h(a,o))(f,b,!p,e,ab.test(a)&&pb(b.parentNode)||b),e},c.sortStable=u.split("").sort(B).join("")===u,c.detectDuplicates=!!l,m(),c.sortDetached=jb(function(a){return 1&a.compareDocumentPosition(n.createElement("div"))}),jb(function(a){return a.innerHTML="","#"===a.firstChild.getAttribute("href")})||kb("type|href|height|width",function(a,b,c){return c?void 0:a.getAttribute(b,"type"===b.toLowerCase()?1:2)}),c.attributes&&jb(function(a){return a.innerHTML="",a.firstChild.setAttribute("value",""),""===a.firstChild.getAttribute("value")})||kb("value",function(a,b,c){return c||"input"!==a.nodeName.toLowerCase()?void 0:a.defaultValue}),jb(function(a){return null==a.getAttribute("disabled")})||kb(K,function(a,b,c){var d;return c?void 0:a[b]===!0?b.toLowerCase():(d=a.getAttributeNode(b))&&d.specified?d.value:null}),gb}(a);n.find=t,n.expr=t.selectors,n.expr[":"]=n.expr.pseudos,n.unique=t.uniqueSort,n.text=t.getText,n.isXMLDoc=t.isXML,n.contains=t.contains;var u=n.expr.match.needsContext,v=/^<(\w+)\s*\/?>(?:<\/\1>|)$/,w=/^.[^:#\[\.,]*$/;function x(a,b,c){if(n.isFunction(b))return n.grep(a,function(a,d){return!!b.call(a,d,a)!==c});if(b.nodeType)return n.grep(a,function(a){return a===b!==c});if("string"==typeof b){if(w.test(b))return n.filter(b,a,c);b=n.filter(b,a)}return n.grep(a,function(a){return g.call(b,a)>=0!==c})}n.filter=function(a,b,c){var d=b[0];return c&&(a=":not("+a+")"),1===b.length&&1===d.nodeType?n.find.matchesSelector(d,a)?[d]:[]:n.find.matches(a,n.grep(b,function(a){return 1===a.nodeType}))},n.fn.extend({find:function(a){var b,c=this.length,d=[],e=this;if("string"!=typeof a)return this.pushStack(n(a).filter(function(){for(b=0;c>b;b++)if(n.contains(e[b],this))return!0}));for(b=0;c>b;b++)n.find(a,e[b],d);return d=this.pushStack(c>1?n.unique(d):d),d.selector=this.selector?this.selector+" "+a:a,d},filter:function(a){return this.pushStack(x(this,a||[],!1))},not:function(a){return this.pushStack(x(this,a||[],!0))},is:function(a){return!!x(this,"string"==typeof a&&u.test(a)?n(a):a||[],!1).length}});var y,z=/^(?:\s*(<[\w\W]+>)[^>]*|#([\w-]*))$/,A=n.fn.init=function(a,b){var c,d;if(!a)return this;if("string"==typeof a){if(c="<"===a[0]&&">"===a[a.length-1]&&a.length>=3?[null,a,null]:z.exec(a),!c||!c[1]&&b)return!b||b.jquery?(b||y).find(a):this.constructor(b).find(a);if(c[1]){if(b=b instanceof n?b[0]:b,n.merge(this,n.parseHTML(c[1],b&&b.nodeType?b.ownerDocument||b:l,!0)),v.test(c[1])&&n.isPlainObject(b))for(c in b)n.isFunction(this[c])?this[c](b[c]):this.attr(c,b[c]);return this}return d=l.getElementById(c[2]),d&&d.parentNode&&(this.length=1,this[0]=d),this.context=l,this.selector=a,this}return a.nodeType?(this.context=this[0]=a,this.length=1,this):n.isFunction(a)?"undefined"!=typeof y.ready?y.ready(a):a(n):(void 0!==a.selector&&(this.selector=a.selector,this.context=a.context),n.makeArray(a,this))};A.prototype=n.fn,y=n(l);var B=/^(?:parents|prev(?:Until|All))/,C={children:!0,contents:!0,next:!0,prev:!0};n.extend({dir:function(a,b,c){var d=[],e=void 0!==c;while((a=a[b])&&9!==a.nodeType)if(1===a.nodeType){if(e&&n(a).is(c))break;d.push(a)}return d},sibling:function(a,b){for(var c=[];a;a=a.nextSibling)1===a.nodeType&&a!==b&&c.push(a);return c}}),n.fn.extend({has:function(a){var b=n(a,this),c=b.length;return this.filter(function(){for(var a=0;c>a;a++)if(n.contains(this,b[a]))return!0})},closest:function(a,b){for(var c,d=0,e=this.length,f=[],g=u.test(a)||"string"!=typeof a?n(a,b||this.context):0;e>d;d++)for(c=this[d];c&&c!==b;c=c.parentNode)if(c.nodeType<11&&(g?g.index(c)>-1:1===c.nodeType&&n.find.matchesSelector(c,a))){f.push(c);break}return this.pushStack(f.length>1?n.unique(f):f)},index:function(a){return a?"string"==typeof a?g.call(n(a),this[0]):g.call(this,a.jquery?a[0]:a):this[0]&&this[0].parentNode?this.first().prevAll().length:-1},add:function(a,b){return this.pushStack(n.unique(n.merge(this.get(),n(a,b))))},addBack:function(a){return this.add(null==a?this.prevObject:this.prevObject.filter(a))}});function D(a,b){while((a=a[b])&&1!==a.nodeType);return a}n.each({parent:function(a){var b=a.parentNode;return b&&11!==b.nodeType?b:null},parents:function(a){return n.dir(a,"parentNode")},parentsUntil:function(a,b,c){return n.dir(a,"parentNode",c)},next:function(a){return D(a,"nextSibling")},prev:function(a){return D(a,"previousSibling")},nextAll:function(a){return n.dir(a,"nextSibling")},prevAll:function(a){return n.dir(a,"previousSibling")},nextUntil:function(a,b,c){return n.dir(a,"nextSibling",c)},prevUntil:function(a,b,c){return n.dir(a,"previousSibling",c)},siblings:function(a){return n.sibling((a.parentNode||{}).firstChild,a)},children:function(a){return n.sibling(a.firstChild)},contents:function(a){return a.contentDocument||n.merge([],a.childNodes)}},function(a,b){n.fn[a]=function(c,d){var e=n.map(this,b,c);return"Until"!==a.slice(-5)&&(d=c),d&&"string"==typeof d&&(e=n.filter(d,e)),this.length>1&&(C[a]||n.unique(e),B.test(a)&&e.reverse()),this.pushStack(e)}});var E=/\S+/g,F={};function G(a){var b=F[a]={};return n.each(a.match(E)||[],function(a,c){b[c]=!0}),b}n.Callbacks=function(a){a="string"==typeof a?F[a]||G(a):n.extend({},a);var b,c,d,e,f,g,h=[],i=!a.once&&[],j=function(l){for(b=a.memory&&l,c=!0,g=e||0,e=0,f=h.length,d=!0;h&&f>g;g++)if(h[g].apply(l[0],l[1])===!1&&a.stopOnFalse){b=!1;break}d=!1,h&&(i?i.length&&j(i.shift()):b?h=[]:k.disable())},k={add:function(){if(h){var c=h.length;!function g(b){n.each(b,function(b,c){var d=n.type(c);"function"===d?a.unique&&k.has(c)||h.push(c):c&&c.length&&"string"!==d&&g(c)})}(arguments),d?f=h.length:b&&(e=c,j(b))}return this},remove:function(){return h&&n.each(arguments,function(a,b){var c;while((c=n.inArray(b,h,c))>-1)h.splice(c,1),d&&(f>=c&&f--,g>=c&&g--)}),this},has:function(a){return a?n.inArray(a,h)>-1:!(!h||!h.length)},empty:function(){return h=[],f=0,this},disable:function(){return h=i=b=void 0,this},disabled:function(){return!h},lock:function(){return i=void 0,b||k.disable(),this},locked:function(){return!i},fireWith:function(a,b){return!h||c&&!i||(b=b||[],b=[a,b.slice?b.slice():b],d?i.push(b):j(b)),this},fire:function(){return k.fireWith(this,arguments),this},fired:function(){return!!c}};return k},n.extend({Deferred:function(a){var b=[["resolve","done",n.Callbacks("once memory"),"resolved"],["reject","fail",n.Callbacks("once memory"),"rejected"],["notify","progress",n.Callbacks("memory")]],c="pending",d={state:function(){return c},always:function(){return e.done(arguments).fail(arguments),this},then:function(){var a=arguments;return n.Deferred(function(c){n.each(b,function(b,f){var g=n.isFunction(a[b])&&a[b];e[f[1]](function(){var a=g&&g.apply(this,arguments);a&&n.isFunction(a.promise)?a.promise().done(c.resolve).fail(c.reject).progress(c.notify):c[f[0]+"With"](this===d?c.promise():this,g?[a]:arguments)})}),a=null}).promise()},promise:function(a){return null!=a?n.extend(a,d):d}},e={};return d.pipe=d.then,n.each(b,function(a,f){var g=f[2],h=f[3];d[f[1]]=g.add,h&&g.add(function(){c=h},b[1^a][2].disable,b[2][2].lock),e[f[0]]=function(){return e[f[0]+"With"](this===e?d:this,arguments),this},e[f[0]+"With"]=g.fireWith}),d.promise(e),a&&a.call(e,e),e},when:function(a){var b=0,c=d.call(arguments),e=c.length,f=1!==e||a&&n.isFunction(a.promise)?e:0,g=1===f?a:n.Deferred(),h=function(a,b,c){return function(e){b[a]=this,c[a]=arguments.length>1?d.call(arguments):e,c===i?g.notifyWith(b,c):--f||g.resolveWith(b,c)}},i,j,k;if(e>1)for(i=new Array(e),j=new Array(e),k=new Array(e);e>b;b++)c[b]&&n.isFunction(c[b].promise)?c[b].promise().done(h(b,k,c)).fail(g.reject).progress(h(b,j,i)):--f;return f||g.resolveWith(k,c),g.promise()}});var H;n.fn.ready=function(a){return n.ready.promise().done(a),this},n.extend({isReady:!1,readyWait:1,holdReady:function(a){a?n.readyWait++:n.ready(!0)},ready:function(a){(a===!0?--n.readyWait:n.isReady)||(n.isReady=!0,a!==!0&&--n.readyWait>0||(H.resolveWith(l,[n]),n.fn.triggerHandler&&(n(l).triggerHandler("ready"),n(l).off("ready"))))}});function I(){l.removeEventListener("DOMContentLoaded",I,!1),a.removeEventListener("load",I,!1),n.ready()}n.ready.promise=function(b){return H||(H=n.Deferred(),"complete"===l.readyState?setTimeout(n.ready):(l.addEventListener("DOMContentLoaded",I,!1),a.addEventListener("load",I,!1))),H.promise(b)},n.ready.promise();var J=n.access=function(a,b,c,d,e,f,g){var h=0,i=a.length,j=null==c;if("object"===n.type(c)){e=!0;for(h in c)n.access(a,b,h,c[h],!0,f,g)}else if(void 0!==d&&(e=!0,n.isFunction(d)||(g=!0),j&&(g?(b.call(a,d),b=null):(j=b,b=function(a,b,c){return j.call(n(a),c)})),b))for(;i>h;h++)b(a[h],c,g?d:d.call(a[h],h,b(a[h],c)));return e?a:j?b.call(a):i?b(a[0],c):f};n.acceptData=function(a){return 1===a.nodeType||9===a.nodeType||!+a.nodeType};function K(){Object.defineProperty(this.cache={},0,{get:function(){return{}}}),this.expando=n.expando+K.uid++}K.uid=1,K.accepts=n.acceptData,K.prototype={key:function(a){if(!K.accepts(a))return 0;var b={},c=a[this.expando];if(!c){c=K.uid++;try{b[this.expando]={value:c},Object.defineProperties(a,b)}catch(d){b[this.expando]=c,n.extend(a,b)}}return this.cache[c]||(this.cache[c]={}),c},set:function(a,b,c){var d,e=this.key(a),f=this.cache[e];if("string"==typeof b)f[b]=c;else if(n.isEmptyObject(f))n.extend(this.cache[e],b);else for(d in b)f[d]=b[d];return f},get:function(a,b){var c=this.cache[this.key(a)];return void 0===b?c:c[b]},access:function(a,b,c){var d;return void 0===b||b&&"string"==typeof b&&void 0===c?(d=this.get(a,b),void 0!==d?d:this.get(a,n.camelCase(b))):(this.set(a,b,c),void 0!==c?c:b)},remove:function(a,b){var c,d,e,f=this.key(a),g=this.cache[f];if(void 0===b)this.cache[f]={};else{n.isArray(b)?d=b.concat(b.map(n.camelCase)):(e=n.camelCase(b),b in g?d=[b,e]:(d=e,d=d in g?[d]:d.match(E)||[])),c=d.length;while(c--)delete g[d[c]]}},hasData:function(a){return!n.isEmptyObject(this.cache[a[this.expando]]||{})},discard:function(a){a[this.expando]&&delete this.cache[a[this.expando]]}};var L=new K,M=new K,N=/^(?:\{[\w\W]*\}|\[[\w\W]*\])$/,O=/([A-Z])/g;function P(a,b,c){var d;if(void 0===c&&1===a.nodeType)if(d="data-"+b.replace(O,"-$1").toLowerCase(),c=a.getAttribute(d),"string"==typeof c){try{c="true"===c?!0:"false"===c?!1:"null"===c?null:+c+""===c?+c:N.test(c)?n.parseJSON(c):c}catch(e){}M.set(a,b,c)}else c=void 0;return c}n.extend({hasData:function(a){return M.hasData(a)||L.hasData(a)},data:function(a,b,c){return M.access(a,b,c)
-},removeData:function(a,b){M.remove(a,b)},_data:function(a,b,c){return L.access(a,b,c)},_removeData:function(a,b){L.remove(a,b)}}),n.fn.extend({data:function(a,b){var c,d,e,f=this[0],g=f&&f.attributes;if(void 0===a){if(this.length&&(e=M.get(f),1===f.nodeType&&!L.get(f,"hasDataAttrs"))){c=g.length;while(c--)g[c]&&(d=g[c].name,0===d.indexOf("data-")&&(d=n.camelCase(d.slice(5)),P(f,d,e[d])));L.set(f,"hasDataAttrs",!0)}return e}return"object"==typeof a?this.each(function(){M.set(this,a)}):J(this,function(b){var c,d=n.camelCase(a);if(f&&void 0===b){if(c=M.get(f,a),void 0!==c)return c;if(c=M.get(f,d),void 0!==c)return c;if(c=P(f,d,void 0),void 0!==c)return c}else this.each(function(){var c=M.get(this,d);M.set(this,d,b),-1!==a.indexOf("-")&&void 0!==c&&M.set(this,a,b)})},null,b,arguments.length>1,null,!0)},removeData:function(a){return this.each(function(){M.remove(this,a)})}}),n.extend({queue:function(a,b,c){var d;return a?(b=(b||"fx")+"queue",d=L.get(a,b),c&&(!d||n.isArray(c)?d=L.access(a,b,n.makeArray(c)):d.push(c)),d||[]):void 0},dequeue:function(a,b){b=b||"fx";var c=n.queue(a,b),d=c.length,e=c.shift(),f=n._queueHooks(a,b),g=function(){n.dequeue(a,b)};"inprogress"===e&&(e=c.shift(),d--),e&&("fx"===b&&c.unshift("inprogress"),delete f.stop,e.call(a,g,f)),!d&&f&&f.empty.fire()},_queueHooks:function(a,b){var c=b+"queueHooks";return L.get(a,c)||L.access(a,c,{empty:n.Callbacks("once memory").add(function(){L.remove(a,[b+"queue",c])})})}}),n.fn.extend({queue:function(a,b){var c=2;return"string"!=typeof a&&(b=a,a="fx",c--),arguments.lengthx",k.noCloneChecked=!!b.cloneNode(!0).lastChild.defaultValue}();var U="undefined";k.focusinBubbles="onfocusin"in a;var V=/^key/,W=/^(?:mouse|pointer|contextmenu)|click/,X=/^(?:focusinfocus|focusoutblur)$/,Y=/^([^.]*)(?:\.(.+)|)$/;function Z(){return!0}function $(){return!1}function _(){try{return l.activeElement}catch(a){}}n.event={global:{},add:function(a,b,c,d,e){var f,g,h,i,j,k,l,m,o,p,q,r=L.get(a);if(r){c.handler&&(f=c,c=f.handler,e=f.selector),c.guid||(c.guid=n.guid++),(i=r.events)||(i=r.events={}),(g=r.handle)||(g=r.handle=function(b){return typeof n!==U&&n.event.triggered!==b.type?n.event.dispatch.apply(a,arguments):void 0}),b=(b||"").match(E)||[""],j=b.length;while(j--)h=Y.exec(b[j])||[],o=q=h[1],p=(h[2]||"").split(".").sort(),o&&(l=n.event.special[o]||{},o=(e?l.delegateType:l.bindType)||o,l=n.event.special[o]||{},k=n.extend({type:o,origType:q,data:d,handler:c,guid:c.guid,selector:e,needsContext:e&&n.expr.match.needsContext.test(e),namespace:p.join(".")},f),(m=i[o])||(m=i[o]=[],m.delegateCount=0,l.setup&&l.setup.call(a,d,p,g)!==!1||a.addEventListener&&a.addEventListener(o,g,!1)),l.add&&(l.add.call(a,k),k.handler.guid||(k.handler.guid=c.guid)),e?m.splice(m.delegateCount++,0,k):m.push(k),n.event.global[o]=!0)}},remove:function(a,b,c,d,e){var f,g,h,i,j,k,l,m,o,p,q,r=L.hasData(a)&&L.get(a);if(r&&(i=r.events)){b=(b||"").match(E)||[""],j=b.length;while(j--)if(h=Y.exec(b[j])||[],o=q=h[1],p=(h[2]||"").split(".").sort(),o){l=n.event.special[o]||{},o=(d?l.delegateType:l.bindType)||o,m=i[o]||[],h=h[2]&&new RegExp("(^|\\.)"+p.join("\\.(?:.*\\.|)")+"(\\.|$)"),g=f=m.length;while(f--)k=m[f],!e&&q!==k.origType||c&&c.guid!==k.guid||h&&!h.test(k.namespace)||d&&d!==k.selector&&("**"!==d||!k.selector)||(m.splice(f,1),k.selector&&m.delegateCount--,l.remove&&l.remove.call(a,k));g&&!m.length&&(l.teardown&&l.teardown.call(a,p,r.handle)!==!1||n.removeEvent(a,o,r.handle),delete i[o])}else for(o in i)n.event.remove(a,o+b[j],c,d,!0);n.isEmptyObject(i)&&(delete r.handle,L.remove(a,"events"))}},trigger:function(b,c,d,e){var f,g,h,i,k,m,o,p=[d||l],q=j.call(b,"type")?b.type:b,r=j.call(b,"namespace")?b.namespace.split("."):[];if(g=h=d=d||l,3!==d.nodeType&&8!==d.nodeType&&!X.test(q+n.event.triggered)&&(q.indexOf(".")>=0&&(r=q.split("."),q=r.shift(),r.sort()),k=q.indexOf(":")<0&&"on"+q,b=b[n.expando]?b:new n.Event(q,"object"==typeof b&&b),b.isTrigger=e?2:3,b.namespace=r.join("."),b.namespace_re=b.namespace?new RegExp("(^|\\.)"+r.join("\\.(?:.*\\.|)")+"(\\.|$)"):null,b.result=void 0,b.target||(b.target=d),c=null==c?[b]:n.makeArray(c,[b]),o=n.event.special[q]||{},e||!o.trigger||o.trigger.apply(d,c)!==!1)){if(!e&&!o.noBubble&&!n.isWindow(d)){for(i=o.delegateType||q,X.test(i+q)||(g=g.parentNode);g;g=g.parentNode)p.push(g),h=g;h===(d.ownerDocument||l)&&p.push(h.defaultView||h.parentWindow||a)}f=0;while((g=p[f++])&&!b.isPropagationStopped())b.type=f>1?i:o.bindType||q,m=(L.get(g,"events")||{})[b.type]&&L.get(g,"handle"),m&&m.apply(g,c),m=k&&g[k],m&&m.apply&&n.acceptData(g)&&(b.result=m.apply(g,c),b.result===!1&&b.preventDefault());return b.type=q,e||b.isDefaultPrevented()||o._default&&o._default.apply(p.pop(),c)!==!1||!n.acceptData(d)||k&&n.isFunction(d[q])&&!n.isWindow(d)&&(h=d[k],h&&(d[k]=null),n.event.triggered=q,d[q](),n.event.triggered=void 0,h&&(d[k]=h)),b.result}},dispatch:function(a){a=n.event.fix(a);var b,c,e,f,g,h=[],i=d.call(arguments),j=(L.get(this,"events")||{})[a.type]||[],k=n.event.special[a.type]||{};if(i[0]=a,a.delegateTarget=this,!k.preDispatch||k.preDispatch.call(this,a)!==!1){h=n.event.handlers.call(this,a,j),b=0;while((f=h[b++])&&!a.isPropagationStopped()){a.currentTarget=f.elem,c=0;while((g=f.handlers[c++])&&!a.isImmediatePropagationStopped())(!a.namespace_re||a.namespace_re.test(g.namespace))&&(a.handleObj=g,a.data=g.data,e=((n.event.special[g.origType]||{}).handle||g.handler).apply(f.elem,i),void 0!==e&&(a.result=e)===!1&&(a.preventDefault(),a.stopPropagation()))}return k.postDispatch&&k.postDispatch.call(this,a),a.result}},handlers:function(a,b){var c,d,e,f,g=[],h=b.delegateCount,i=a.target;if(h&&i.nodeType&&(!a.button||"click"!==a.type))for(;i!==this;i=i.parentNode||this)if(i.disabled!==!0||"click"!==a.type){for(d=[],c=0;h>c;c++)f=b[c],e=f.selector+" ",void 0===d[e]&&(d[e]=f.needsContext?n(e,this).index(i)>=0:n.find(e,this,null,[i]).length),d[e]&&d.push(f);d.length&&g.push({elem:i,handlers:d})}return h]*)\/>/gi,bb=/<([\w:]+)/,cb=/<|&#?\w+;/,db=/<(?:script|style|link)/i,eb=/checked\s*(?:[^=]|=\s*.checked.)/i,fb=/^$|\/(?:java|ecma)script/i,gb=/^true\/(.*)/,hb=/^\s*\s*$/g,ib={option:[1,""],thead:[1,""],col:[2,""],tr:[2,""],td:[3,""],_default:[0,"",""]};ib.optgroup=ib.option,ib.tbody=ib.tfoot=ib.colgroup=ib.caption=ib.thead,ib.th=ib.td;function jb(a,b){return n.nodeName(a,"table")&&n.nodeName(11!==b.nodeType?b:b.firstChild,"tr")?a.getElementsByTagName("tbody")[0]||a.appendChild(a.ownerDocument.createElement("tbody")):a}function kb(a){return a.type=(null!==a.getAttribute("type"))+"/"+a.type,a}function lb(a){var b=gb.exec(a.type);return b?a.type=b[1]:a.removeAttribute("type"),a}function mb(a,b){for(var c=0,d=a.length;d>c;c++)L.set(a[c],"globalEval",!b||L.get(b[c],"globalEval"))}function nb(a,b){var c,d,e,f,g,h,i,j;if(1===b.nodeType){if(L.hasData(a)&&(f=L.access(a),g=L.set(b,f),j=f.events)){delete g.handle,g.events={};for(e in j)for(c=0,d=j[e].length;d>c;c++)n.event.add(b,e,j[e][c])}M.hasData(a)&&(h=M.access(a),i=n.extend({},h),M.set(b,i))}}function ob(a,b){var c=a.getElementsByTagName?a.getElementsByTagName(b||"*"):a.querySelectorAll?a.querySelectorAll(b||"*"):[];return void 0===b||b&&n.nodeName(a,b)?n.merge([a],c):c}function pb(a,b){var c=b.nodeName.toLowerCase();"input"===c&&T.test(a.type)?b.checked=a.checked:("input"===c||"textarea"===c)&&(b.defaultValue=a.defaultValue)}n.extend({clone:function(a,b,c){var d,e,f,g,h=a.cloneNode(!0),i=n.contains(a.ownerDocument,a);if(!(k.noCloneChecked||1!==a.nodeType&&11!==a.nodeType||n.isXMLDoc(a)))for(g=ob(h),f=ob(a),d=0,e=f.length;e>d;d++)pb(f[d],g[d]);if(b)if(c)for(f=f||ob(a),g=g||ob(h),d=0,e=f.length;e>d;d++)nb(f[d],g[d]);else nb(a,h);return g=ob(h,"script"),g.length>0&&mb(g,!i&&ob(a,"script")),h},buildFragment:function(a,b,c,d){for(var e,f,g,h,i,j,k=b.createDocumentFragment(),l=[],m=0,o=a.length;o>m;m++)if(e=a[m],e||0===e)if("object"===n.type(e))n.merge(l,e.nodeType?[e]:e);else if(cb.test(e)){f=f||k.appendChild(b.createElement("div")),g=(bb.exec(e)||["",""])[1].toLowerCase(),h=ib[g]||ib._default,f.innerHTML=h[1]+e.replace(ab,"<$1>")+h[2],j=h[0];while(j--)f=f.lastChild;n.merge(l,f.childNodes),f=k.firstChild,f.textContent=""}else l.push(b.createTextNode(e));k.textContent="",m=0;while(e=l[m++])if((!d||-1===n.inArray(e,d))&&(i=n.contains(e.ownerDocument,e),f=ob(k.appendChild(e),"script"),i&&mb(f),c)){j=0;while(e=f[j++])fb.test(e.type||"")&&c.push(e)}return k},cleanData:function(a){for(var b,c,d,e,f=n.event.special,g=0;void 0!==(c=a[g]);g++){if(n.acceptData(c)&&(e=c[L.expando],e&&(b=L.cache[e]))){if(b.events)for(d in b.events)f[d]?n.event.remove(c,d):n.removeEvent(c,d,b.handle);L.cache[e]&&delete L.cache[e]}delete M.cache[c[M.expando]]}}}),n.fn.extend({text:function(a){return J(this,function(a){return void 0===a?n.text(this):this.empty().each(function(){(1===this.nodeType||11===this.nodeType||9===this.nodeType)&&(this.textContent=a)})},null,a,arguments.length)},append:function(){return this.domManip(arguments,function(a){if(1===this.nodeType||11===this.nodeType||9===this.nodeType){var b=jb(this,a);b.appendChild(a)}})},prepend:function(){return this.domManip(arguments,function(a){if(1===this.nodeType||11===this.nodeType||9===this.nodeType){var b=jb(this,a);b.insertBefore(a,b.firstChild)}})},before:function(){return this.domManip(arguments,function(a){this.parentNode&&this.parentNode.insertBefore(a,this)})},after:function(){return this.domManip(arguments,function(a){this.parentNode&&this.parentNode.insertBefore(a,this.nextSibling)})},remove:function(a,b){for(var c,d=a?n.filter(a,this):this,e=0;null!=(c=d[e]);e++)b||1!==c.nodeType||n.cleanData(ob(c)),c.parentNode&&(b&&n.contains(c.ownerDocument,c)&&mb(ob(c,"script")),c.parentNode.removeChild(c));return this},empty:function(){for(var a,b=0;null!=(a=this[b]);b++)1===a.nodeType&&(n.cleanData(ob(a,!1)),a.textContent="");return this},clone:function(a,b){return a=null==a?!1:a,b=null==b?a:b,this.map(function(){return n.clone(this,a,b)})},html:function(a){return J(this,function(a){var b=this[0]||{},c=0,d=this.length;if(void 0===a&&1===b.nodeType)return b.innerHTML;if("string"==typeof a&&!db.test(a)&&!ib[(bb.exec(a)||["",""])[1].toLowerCase()]){a=a.replace(ab,"<$1>");try{for(;d>c;c++)b=this[c]||{},1===b.nodeType&&(n.cleanData(ob(b,!1)),b.innerHTML=a);b=0}catch(e){}}b&&this.empty().append(a)},null,a,arguments.length)},replaceWith:function(){var a=arguments[0];return this.domManip(arguments,function(b){a=this.parentNode,n.cleanData(ob(this)),a&&a.replaceChild(b,this)}),a&&(a.length||a.nodeType)?this:this.remove()},detach:function(a){return this.remove(a,!0)},domManip:function(a,b){a=e.apply([],a);var c,d,f,g,h,i,j=0,l=this.length,m=this,o=l-1,p=a[0],q=n.isFunction(p);if(q||l>1&&"string"==typeof p&&!k.checkClone&&eb.test(p))return this.each(function(c){var d=m.eq(c);q&&(a[0]=p.call(this,c,d.html())),d.domManip(a,b)});if(l&&(c=n.buildFragment(a,this[0].ownerDocument,!1,this),d=c.firstChild,1===c.childNodes.length&&(c=d),d)){for(f=n.map(ob(c,"script"),kb),g=f.length;l>j;j++)h=c,j!==o&&(h=n.clone(h,!0,!0),g&&n.merge(f,ob(h,"script"))),b.call(this[j],h,j);if(g)for(i=f[f.length-1].ownerDocument,n.map(f,lb),j=0;g>j;j++)h=f[j],fb.test(h.type||"")&&!L.access(h,"globalEval")&&n.contains(i,h)&&(h.src?n._evalUrl&&n._evalUrl(h.src):n.globalEval(h.textContent.replace(hb,"")))}return this}}),n.each({appendTo:"append",prependTo:"prepend",insertBefore:"before",insertAfter:"after",replaceAll:"replaceWith"},function(a,b){n.fn[a]=function(a){for(var c,d=[],e=n(a),g=e.length-1,h=0;g>=h;h++)c=h===g?this:this.clone(!0),n(e[h])[b](c),f.apply(d,c.get());return this.pushStack(d)}});var qb,rb={};function sb(b,c){var d,e=n(c.createElement(b)).appendTo(c.body),f=a.getDefaultComputedStyle&&(d=a.getDefaultComputedStyle(e[0]))?d.display:n.css(e[0],"display");return e.detach(),f}function tb(a){var b=l,c=rb[a];return c||(c=sb(a,b),"none"!==c&&c||(qb=(qb||n("")).appendTo(b.documentElement),b=qb[0].contentDocument,b.write(),b.close(),c=sb(a,b),qb.detach()),rb[a]=c),c}var ub=/^margin/,vb=new RegExp("^("+Q+")(?!px)[a-z%]+$","i"),wb=function(b){return b.ownerDocument.defaultView.opener?b.ownerDocument.defaultView.getComputedStyle(b,null):a.getComputedStyle(b,null)};function xb(a,b,c){var d,e,f,g,h=a.style;return c=c||wb(a),c&&(g=c.getPropertyValue(b)||c[b]),c&&(""!==g||n.contains(a.ownerDocument,a)||(g=n.style(a,b)),vb.test(g)&&ub.test(b)&&(d=h.width,e=h.minWidth,f=h.maxWidth,h.minWidth=h.maxWidth=h.width=g,g=c.width,h.width=d,h.minWidth=e,h.maxWidth=f)),void 0!==g?g+"":g}function yb(a,b){return{get:function(){return a()?void delete this.get:(this.get=b).apply(this,arguments)}}}!function(){var b,c,d=l.documentElement,e=l.createElement("div"),f=l.createElement("div");if(f.style){f.style.backgroundClip="content-box",f.cloneNode(!0).style.backgroundClip="",k.clearCloneStyle="content-box"===f.style.backgroundClip,e.style.cssText="border:0;width:0;height:0;top:0;left:-9999px;margin-top:1px;position:absolute",e.appendChild(f);function g(){f.style.cssText="-webkit-box-sizing:border-box;-moz-box-sizing:border-box;box-sizing:border-box;display:block;margin-top:1%;top:1%;border:1px;padding:1px;width:4px;position:absolute",f.innerHTML="",d.appendChild(e);var g=a.getComputedStyle(f,null);b="1%"!==g.top,c="4px"===g.width,d.removeChild(e)}a.getComputedStyle&&n.extend(k,{pixelPosition:function(){return g(),b},boxSizingReliable:function(){return null==c&&g(),c},reliableMarginRight:function(){var b,c=f.appendChild(l.createElement("div"));return c.style.cssText=f.style.cssText="-webkit-box-sizing:content-box;-moz-box-sizing:content-box;box-sizing:content-box;display:block;margin:0;border:0;padding:0",c.style.marginRight=c.style.width="0",f.style.width="1px",d.appendChild(e),b=!parseFloat(a.getComputedStyle(c,null).marginRight),d.removeChild(e),f.removeChild(c),b}})}}(),n.swap=function(a,b,c,d){var e,f,g={};for(f in b)g[f]=a.style[f],a.style[f]=b[f];e=c.apply(a,d||[]);for(f in b)a.style[f]=g[f];return e};var zb=/^(none|table(?!-c[ea]).+)/,Ab=new RegExp("^("+Q+")(.*)$","i"),Bb=new RegExp("^([+-])=("+Q+")","i"),Cb={position:"absolute",visibility:"hidden",display:"block"},Db={letterSpacing:"0",fontWeight:"400"},Eb=["Webkit","O","Moz","ms"];function Fb(a,b){if(b in a)return b;var c=b[0].toUpperCase()+b.slice(1),d=b,e=Eb.length;while(e--)if(b=Eb[e]+c,b in a)return b;return d}function Gb(a,b,c){var d=Ab.exec(b);return d?Math.max(0,d[1]-(c||0))+(d[2]||"px"):b}function Hb(a,b,c,d,e){for(var f=c===(d?"border":"content")?4:"width"===b?1:0,g=0;4>f;f+=2)"margin"===c&&(g+=n.css(a,c+R[f],!0,e)),d?("content"===c&&(g-=n.css(a,"padding"+R[f],!0,e)),"margin"!==c&&(g-=n.css(a,"border"+R[f]+"Width",!0,e))):(g+=n.css(a,"padding"+R[f],!0,e),"padding"!==c&&(g+=n.css(a,"border"+R[f]+"Width",!0,e)));return g}function Ib(a,b,c){var d=!0,e="width"===b?a.offsetWidth:a.offsetHeight,f=wb(a),g="border-box"===n.css(a,"boxSizing",!1,f);if(0>=e||null==e){if(e=xb(a,b,f),(0>e||null==e)&&(e=a.style[b]),vb.test(e))return e;d=g&&(k.boxSizingReliable()||e===a.style[b]),e=parseFloat(e)||0}return e+Hb(a,b,c||(g?"border":"content"),d,f)+"px"}function Jb(a,b){for(var c,d,e,f=[],g=0,h=a.length;h>g;g++)d=a[g],d.style&&(f[g]=L.get(d,"olddisplay"),c=d.style.display,b?(f[g]||"none"!==c||(d.style.display=""),""===d.style.display&&S(d)&&(f[g]=L.access(d,"olddisplay",tb(d.nodeName)))):(e=S(d),"none"===c&&e||L.set(d,"olddisplay",e?c:n.css(d,"display"))));for(g=0;h>g;g++)d=a[g],d.style&&(b&&"none"!==d.style.display&&""!==d.style.display||(d.style.display=b?f[g]||"":"none"));return a}n.extend({cssHooks:{opacity:{get:function(a,b){if(b){var c=xb(a,"opacity");return""===c?"1":c}}}},cssNumber:{columnCount:!0,fillOpacity:!0,flexGrow:!0,flexShrink:!0,fontWeight:!0,lineHeight:!0,opacity:!0,order:!0,orphans:!0,widows:!0,zIndex:!0,zoom:!0},cssProps:{"float":"cssFloat"},style:function(a,b,c,d){if(a&&3!==a.nodeType&&8!==a.nodeType&&a.style){var e,f,g,h=n.camelCase(b),i=a.style;return b=n.cssProps[h]||(n.cssProps[h]=Fb(i,h)),g=n.cssHooks[b]||n.cssHooks[h],void 0===c?g&&"get"in g&&void 0!==(e=g.get(a,!1,d))?e:i[b]:(f=typeof c,"string"===f&&(e=Bb.exec(c))&&(c=(e[1]+1)*e[2]+parseFloat(n.css(a,b)),f="number"),null!=c&&c===c&&("number"!==f||n.cssNumber[h]||(c+="px"),k.clearCloneStyle||""!==c||0!==b.indexOf("background")||(i[b]="inherit"),g&&"set"in g&&void 0===(c=g.set(a,c,d))||(i[b]=c)),void 0)}},css:function(a,b,c,d){var e,f,g,h=n.camelCase(b);return b=n.cssProps[h]||(n.cssProps[h]=Fb(a.style,h)),g=n.cssHooks[b]||n.cssHooks[h],g&&"get"in g&&(e=g.get(a,!0,c)),void 0===e&&(e=xb(a,b,d)),"normal"===e&&b in Db&&(e=Db[b]),""===c||c?(f=parseFloat(e),c===!0||n.isNumeric(f)?f||0:e):e}}),n.each(["height","width"],function(a,b){n.cssHooks[b]={get:function(a,c,d){return c?zb.test(n.css(a,"display"))&&0===a.offsetWidth?n.swap(a,Cb,function(){return Ib(a,b,d)}):Ib(a,b,d):void 0},set:function(a,c,d){var e=d&&wb(a);return Gb(a,c,d?Hb(a,b,d,"border-box"===n.css(a,"boxSizing",!1,e),e):0)}}}),n.cssHooks.marginRight=yb(k.reliableMarginRight,function(a,b){return b?n.swap(a,{display:"inline-block"},xb,[a,"marginRight"]):void 0}),n.each({margin:"",padding:"",border:"Width"},function(a,b){n.cssHooks[a+b]={expand:function(c){for(var d=0,e={},f="string"==typeof c?c.split(" "):[c];4>d;d++)e[a+R[d]+b]=f[d]||f[d-2]||f[0];return e}},ub.test(a)||(n.cssHooks[a+b].set=Gb)}),n.fn.extend({css:function(a,b){return J(this,function(a,b,c){var d,e,f={},g=0;if(n.isArray(b)){for(d=wb(a),e=b.length;e>g;g++)f[b[g]]=n.css(a,b[g],!1,d);return f}return void 0!==c?n.style(a,b,c):n.css(a,b)},a,b,arguments.length>1)},show:function(){return Jb(this,!0)},hide:function(){return Jb(this)},toggle:function(a){return"boolean"==typeof a?a?this.show():this.hide():this.each(function(){S(this)?n(this).show():n(this).hide()})}});function Kb(a,b,c,d,e){return new Kb.prototype.init(a,b,c,d,e)}n.Tween=Kb,Kb.prototype={constructor:Kb,init:function(a,b,c,d,e,f){this.elem=a,this.prop=c,this.easing=e||"swing",this.options=b,this.start=this.now=this.cur(),this.end=d,this.unit=f||(n.cssNumber[c]?"":"px")},cur:function(){var a=Kb.propHooks[this.prop];return a&&a.get?a.get(this):Kb.propHooks._default.get(this)},run:function(a){var b,c=Kb.propHooks[this.prop];return this.pos=b=this.options.duration?n.easing[this.easing](a,this.options.duration*a,0,1,this.options.duration):a,this.now=(this.end-this.start)*b+this.start,this.options.step&&this.options.step.call(this.elem,this.now,this),c&&c.set?c.set(this):Kb.propHooks._default.set(this),this}},Kb.prototype.init.prototype=Kb.prototype,Kb.propHooks={_default:{get:function(a){var b;return null==a.elem[a.prop]||a.elem.style&&null!=a.elem.style[a.prop]?(b=n.css(a.elem,a.prop,""),b&&"auto"!==b?b:0):a.elem[a.prop]},set:function(a){n.fx.step[a.prop]?n.fx.step[a.prop](a):a.elem.style&&(null!=a.elem.style[n.cssProps[a.prop]]||n.cssHooks[a.prop])?n.style(a.elem,a.prop,a.now+a.unit):a.elem[a.prop]=a.now}}},Kb.propHooks.scrollTop=Kb.propHooks.scrollLeft={set:function(a){a.elem.nodeType&&a.elem.parentNode&&(a.elem[a.prop]=a.now)}},n.easing={linear:function(a){return a},swing:function(a){return.5-Math.cos(a*Math.PI)/2}},n.fx=Kb.prototype.init,n.fx.step={};var Lb,Mb,Nb=/^(?:toggle|show|hide)$/,Ob=new RegExp("^(?:([+-])=|)("+Q+")([a-z%]*)$","i"),Pb=/queueHooks$/,Qb=[Vb],Rb={"*":[function(a,b){var c=this.createTween(a,b),d=c.cur(),e=Ob.exec(b),f=e&&e[3]||(n.cssNumber[a]?"":"px"),g=(n.cssNumber[a]||"px"!==f&&+d)&&Ob.exec(n.css(c.elem,a)),h=1,i=20;if(g&&g[3]!==f){f=f||g[3],e=e||[],g=+d||1;do h=h||".5",g/=h,n.style(c.elem,a,g+f);while(h!==(h=c.cur()/d)&&1!==h&&--i)}return e&&(g=c.start=+g||+d||0,c.unit=f,c.end=e[1]?g+(e[1]+1)*e[2]:+e[2]),c}]};function Sb(){return setTimeout(function(){Lb=void 0}),Lb=n.now()}function Tb(a,b){var c,d=0,e={height:a};for(b=b?1:0;4>d;d+=2-b)c=R[d],e["margin"+c]=e["padding"+c]=a;return b&&(e.opacity=e.width=a),e}function Ub(a,b,c){for(var d,e=(Rb[b]||[]).concat(Rb["*"]),f=0,g=e.length;g>f;f++)if(d=e[f].call(c,b,a))return d}function Vb(a,b,c){var d,e,f,g,h,i,j,k,l=this,m={},o=a.style,p=a.nodeType&&S(a),q=L.get(a,"fxshow");c.queue||(h=n._queueHooks(a,"fx"),null==h.unqueued&&(h.unqueued=0,i=h.empty.fire,h.empty.fire=function(){h.unqueued||i()}),h.unqueued++,l.always(function(){l.always(function(){h.unqueued--,n.queue(a,"fx").length||h.empty.fire()})})),1===a.nodeType&&("height"in b||"width"in b)&&(c.overflow=[o.overflow,o.overflowX,o.overflowY],j=n.css(a,"display"),k="none"===j?L.get(a,"olddisplay")||tb(a.nodeName):j,"inline"===k&&"none"===n.css(a,"float")&&(o.display="inline-block")),c.overflow&&(o.overflow="hidden",l.always(function(){o.overflow=c.overflow[0],o.overflowX=c.overflow[1],o.overflowY=c.overflow[2]}));for(d in b)if(e=b[d],Nb.exec(e)){if(delete b[d],f=f||"toggle"===e,e===(p?"hide":"show")){if("show"!==e||!q||void 0===q[d])continue;p=!0}m[d]=q&&q[d]||n.style(a,d)}else j=void 0;if(n.isEmptyObject(m))"inline"===("none"===j?tb(a.nodeName):j)&&(o.display=j);else{q?"hidden"in q&&(p=q.hidden):q=L.access(a,"fxshow",{}),f&&(q.hidden=!p),p?n(a).show():l.done(function(){n(a).hide()}),l.done(function(){var b;L.remove(a,"fxshow");for(b in m)n.style(a,b,m[b])});for(d in m)g=Ub(p?q[d]:0,d,l),d in q||(q[d]=g.start,p&&(g.end=g.start,g.start="width"===d||"height"===d?1:0))}}function Wb(a,b){var c,d,e,f,g;for(c in a)if(d=n.camelCase(c),e=b[d],f=a[c],n.isArray(f)&&(e=f[1],f=a[c]=f[0]),c!==d&&(a[d]=f,delete a[c]),g=n.cssHooks[d],g&&"expand"in g){f=g.expand(f),delete a[d];for(c in f)c in a||(a[c]=f[c],b[c]=e)}else b[d]=e}function Xb(a,b,c){var d,e,f=0,g=Qb.length,h=n.Deferred().always(function(){delete i.elem}),i=function(){if(e)return!1;for(var b=Lb||Sb(),c=Math.max(0,j.startTime+j.duration-b),d=c/j.duration||0,f=1-d,g=0,i=j.tweens.length;i>g;g++)j.tweens[g].run(f);return h.notifyWith(a,[j,f,c]),1>f&&i?c:(h.resolveWith(a,[j]),!1)},j=h.promise({elem:a,props:n.extend({},b),opts:n.extend(!0,{specialEasing:{}},c),originalProperties:b,originalOptions:c,startTime:Lb||Sb(),duration:c.duration,tweens:[],createTween:function(b,c){var d=n.Tween(a,j.opts,b,c,j.opts.specialEasing[b]||j.opts.easing);return j.tweens.push(d),d},stop:function(b){var c=0,d=b?j.tweens.length:0;if(e)return this;for(e=!0;d>c;c++)j.tweens[c].run(1);return b?h.resolveWith(a,[j,b]):h.rejectWith(a,[j,b]),this}}),k=j.props;for(Wb(k,j.opts.specialEasing);g>f;f++)if(d=Qb[f].call(j,a,k,j.opts))return d;return n.map(k,Ub,j),n.isFunction(j.opts.start)&&j.opts.start.call(a,j),n.fx.timer(n.extend(i,{elem:a,anim:j,queue:j.opts.queue})),j.progress(j.opts.progress).done(j.opts.done,j.opts.complete).fail(j.opts.fail).always(j.opts.always)}n.Animation=n.extend(Xb,{tweener:function(a,b){n.isFunction(a)?(b=a,a=["*"]):a=a.split(" ");for(var c,d=0,e=a.length;e>d;d++)c=a[d],Rb[c]=Rb[c]||[],Rb[c].unshift(b)},prefilter:function(a,b){b?Qb.unshift(a):Qb.push(a)}}),n.speed=function(a,b,c){var d=a&&"object"==typeof a?n.extend({},a):{complete:c||!c&&b||n.isFunction(a)&&a,duration:a,easing:c&&b||b&&!n.isFunction(b)&&b};return d.duration=n.fx.off?0:"number"==typeof d.duration?d.duration:d.duration in n.fx.speeds?n.fx.speeds[d.duration]:n.fx.speeds._default,(null==d.queue||d.queue===!0)&&(d.queue="fx"),d.old=d.complete,d.complete=function(){n.isFunction(d.old)&&d.old.call(this),d.queue&&n.dequeue(this,d.queue)},d},n.fn.extend({fadeTo:function(a,b,c,d){return this.filter(S).css("opacity",0).show().end().animate({opacity:b},a,c,d)},animate:function(a,b,c,d){var e=n.isEmptyObject(a),f=n.speed(b,c,d),g=function(){var b=Xb(this,n.extend({},a),f);(e||L.get(this,"finish"))&&b.stop(!0)};return g.finish=g,e||f.queue===!1?this.each(g):this.queue(f.queue,g)},stop:function(a,b,c){var d=function(a){var b=a.stop;delete a.stop,b(c)};return"string"!=typeof a&&(c=b,b=a,a=void 0),b&&a!==!1&&this.queue(a||"fx",[]),this.each(function(){var b=!0,e=null!=a&&a+"queueHooks",f=n.timers,g=L.get(this);if(e)g[e]&&g[e].stop&&d(g[e]);else for(e in g)g[e]&&g[e].stop&&Pb.test(e)&&d(g[e]);for(e=f.length;e--;)f[e].elem!==this||null!=a&&f[e].queue!==a||(f[e].anim.stop(c),b=!1,f.splice(e,1));(b||!c)&&n.dequeue(this,a)})},finish:function(a){return a!==!1&&(a=a||"fx"),this.each(function(){var b,c=L.get(this),d=c[a+"queue"],e=c[a+"queueHooks"],f=n.timers,g=d?d.length:0;for(c.finish=!0,n.queue(this,a,[]),e&&e.stop&&e.stop.call(this,!0),b=f.length;b--;)f[b].elem===this&&f[b].queue===a&&(f[b].anim.stop(!0),f.splice(b,1));for(b=0;g>b;b++)d[b]&&d[b].finish&&d[b].finish.call(this);delete c.finish})}}),n.each(["toggle","show","hide"],function(a,b){var c=n.fn[b];n.fn[b]=function(a,d,e){return null==a||"boolean"==typeof a?c.apply(this,arguments):this.animate(Tb(b,!0),a,d,e)}}),n.each({slideDown:Tb("show"),slideUp:Tb("hide"),slideToggle:Tb("toggle"),fadeIn:{opacity:"show"},fadeOut:{opacity:"hide"},fadeToggle:{opacity:"toggle"}},function(a,b){n.fn[a]=function(a,c,d){return this.animate(b,a,c,d)}}),n.timers=[],n.fx.tick=function(){var a,b=0,c=n.timers;for(Lb=n.now();b1)},removeAttr:function(a){return this.each(function(){n.removeAttr(this,a)})}}),n.extend({attr:function(a,b,c){var d,e,f=a.nodeType;if(a&&3!==f&&8!==f&&2!==f)return typeof a.getAttribute===U?n.prop(a,b,c):(1===f&&n.isXMLDoc(a)||(b=b.toLowerCase(),d=n.attrHooks[b]||(n.expr.match.bool.test(b)?Zb:Yb)),void 0===c?d&&"get"in d&&null!==(e=d.get(a,b))?e:(e=n.find.attr(a,b),null==e?void 0:e):null!==c?d&&"set"in d&&void 0!==(e=d.set(a,c,b))?e:(a.setAttribute(b,c+""),c):void n.removeAttr(a,b))
-},removeAttr:function(a,b){var c,d,e=0,f=b&&b.match(E);if(f&&1===a.nodeType)while(c=f[e++])d=n.propFix[c]||c,n.expr.match.bool.test(c)&&(a[d]=!1),a.removeAttribute(c)},attrHooks:{type:{set:function(a,b){if(!k.radioValue&&"radio"===b&&n.nodeName(a,"input")){var c=a.value;return a.setAttribute("type",b),c&&(a.value=c),b}}}}}),Zb={set:function(a,b,c){return b===!1?n.removeAttr(a,c):a.setAttribute(c,c),c}},n.each(n.expr.match.bool.source.match(/\w+/g),function(a,b){var c=$b[b]||n.find.attr;$b[b]=function(a,b,d){var e,f;return d||(f=$b[b],$b[b]=e,e=null!=c(a,b,d)?b.toLowerCase():null,$b[b]=f),e}});var _b=/^(?:input|select|textarea|button)$/i;n.fn.extend({prop:function(a,b){return J(this,n.prop,a,b,arguments.length>1)},removeProp:function(a){return this.each(function(){delete this[n.propFix[a]||a]})}}),n.extend({propFix:{"for":"htmlFor","class":"className"},prop:function(a,b,c){var d,e,f,g=a.nodeType;if(a&&3!==g&&8!==g&&2!==g)return f=1!==g||!n.isXMLDoc(a),f&&(b=n.propFix[b]||b,e=n.propHooks[b]),void 0!==c?e&&"set"in e&&void 0!==(d=e.set(a,c,b))?d:a[b]=c:e&&"get"in e&&null!==(d=e.get(a,b))?d:a[b]},propHooks:{tabIndex:{get:function(a){return a.hasAttribute("tabindex")||_b.test(a.nodeName)||a.href?a.tabIndex:-1}}}}),k.optSelected||(n.propHooks.selected={get:function(a){var b=a.parentNode;return b&&b.parentNode&&b.parentNode.selectedIndex,null}}),n.each(["tabIndex","readOnly","maxLength","cellSpacing","cellPadding","rowSpan","colSpan","useMap","frameBorder","contentEditable"],function(){n.propFix[this.toLowerCase()]=this});var ac=/[\t\r\n\f]/g;n.fn.extend({addClass:function(a){var b,c,d,e,f,g,h="string"==typeof a&&a,i=0,j=this.length;if(n.isFunction(a))return this.each(function(b){n(this).addClass(a.call(this,b,this.className))});if(h)for(b=(a||"").match(E)||[];j>i;i++)if(c=this[i],d=1===c.nodeType&&(c.className?(" "+c.className+" ").replace(ac," "):" ")){f=0;while(e=b[f++])d.indexOf(" "+e+" ")<0&&(d+=e+" ");g=n.trim(d),c.className!==g&&(c.className=g)}return this},removeClass:function(a){var b,c,d,e,f,g,h=0===arguments.length||"string"==typeof a&&a,i=0,j=this.length;if(n.isFunction(a))return this.each(function(b){n(this).removeClass(a.call(this,b,this.className))});if(h)for(b=(a||"").match(E)||[];j>i;i++)if(c=this[i],d=1===c.nodeType&&(c.className?(" "+c.className+" ").replace(ac," "):"")){f=0;while(e=b[f++])while(d.indexOf(" "+e+" ")>=0)d=d.replace(" "+e+" "," ");g=a?n.trim(d):"",c.className!==g&&(c.className=g)}return this},toggleClass:function(a,b){var c=typeof a;return"boolean"==typeof b&&"string"===c?b?this.addClass(a):this.removeClass(a):this.each(n.isFunction(a)?function(c){n(this).toggleClass(a.call(this,c,this.className,b),b)}:function(){if("string"===c){var b,d=0,e=n(this),f=a.match(E)||[];while(b=f[d++])e.hasClass(b)?e.removeClass(b):e.addClass(b)}else(c===U||"boolean"===c)&&(this.className&&L.set(this,"__className__",this.className),this.className=this.className||a===!1?"":L.get(this,"__className__")||"")})},hasClass:function(a){for(var b=" "+a+" ",c=0,d=this.length;d>c;c++)if(1===this[c].nodeType&&(" "+this[c].className+" ").replace(ac," ").indexOf(b)>=0)return!0;return!1}});var bc=/\r/g;n.fn.extend({val:function(a){var b,c,d,e=this[0];{if(arguments.length)return d=n.isFunction(a),this.each(function(c){var e;1===this.nodeType&&(e=d?a.call(this,c,n(this).val()):a,null==e?e="":"number"==typeof e?e+="":n.isArray(e)&&(e=n.map(e,function(a){return null==a?"":a+""})),b=n.valHooks[this.type]||n.valHooks[this.nodeName.toLowerCase()],b&&"set"in b&&void 0!==b.set(this,e,"value")||(this.value=e))});if(e)return b=n.valHooks[e.type]||n.valHooks[e.nodeName.toLowerCase()],b&&"get"in b&&void 0!==(c=b.get(e,"value"))?c:(c=e.value,"string"==typeof c?c.replace(bc,""):null==c?"":c)}}}),n.extend({valHooks:{option:{get:function(a){var b=n.find.attr(a,"value");return null!=b?b:n.trim(n.text(a))}},select:{get:function(a){for(var b,c,d=a.options,e=a.selectedIndex,f="select-one"===a.type||0>e,g=f?null:[],h=f?e+1:d.length,i=0>e?h:f?e:0;h>i;i++)if(c=d[i],!(!c.selected&&i!==e||(k.optDisabled?c.disabled:null!==c.getAttribute("disabled"))||c.parentNode.disabled&&n.nodeName(c.parentNode,"optgroup"))){if(b=n(c).val(),f)return b;g.push(b)}return g},set:function(a,b){var c,d,e=a.options,f=n.makeArray(b),g=e.length;while(g--)d=e[g],(d.selected=n.inArray(d.value,f)>=0)&&(c=!0);return c||(a.selectedIndex=-1),f}}}}),n.each(["radio","checkbox"],function(){n.valHooks[this]={set:function(a,b){return n.isArray(b)?a.checked=n.inArray(n(a).val(),b)>=0:void 0}},k.checkOn||(n.valHooks[this].get=function(a){return null===a.getAttribute("value")?"on":a.value})}),n.each("blur focus focusin focusout load resize scroll unload click dblclick mousedown mouseup mousemove mouseover mouseout mouseenter mouseleave change select submit keydown keypress keyup error contextmenu".split(" "),function(a,b){n.fn[b]=function(a,c){return arguments.length>0?this.on(b,null,a,c):this.trigger(b)}}),n.fn.extend({hover:function(a,b){return this.mouseenter(a).mouseleave(b||a)},bind:function(a,b,c){return this.on(a,null,b,c)},unbind:function(a,b){return this.off(a,null,b)},delegate:function(a,b,c,d){return this.on(b,a,c,d)},undelegate:function(a,b,c){return 1===arguments.length?this.off(a,"**"):this.off(b,a||"**",c)}});var cc=n.now(),dc=/\?/;n.parseJSON=function(a){return JSON.parse(a+"")},n.parseXML=function(a){var b,c;if(!a||"string"!=typeof a)return null;try{c=new DOMParser,b=c.parseFromString(a,"text/xml")}catch(d){b=void 0}return(!b||b.getElementsByTagName("parsererror").length)&&n.error("Invalid XML: "+a),b};var ec=/#.*$/,fc=/([?&])_=[^&]*/,gc=/^(.*?):[ \t]*([^\r\n]*)$/gm,hc=/^(?:about|app|app-storage|.+-extension|file|res|widget):$/,ic=/^(?:GET|HEAD)$/,jc=/^\/\//,kc=/^([\w.+-]+:)(?:\/\/(?:[^\/?#]*@|)([^\/?#:]*)(?::(\d+)|)|)/,lc={},mc={},nc="*/".concat("*"),oc=a.location.href,pc=kc.exec(oc.toLowerCase())||[];function qc(a){return function(b,c){"string"!=typeof b&&(c=b,b="*");var d,e=0,f=b.toLowerCase().match(E)||[];if(n.isFunction(c))while(d=f[e++])"+"===d[0]?(d=d.slice(1)||"*",(a[d]=a[d]||[]).unshift(c)):(a[d]=a[d]||[]).push(c)}}function rc(a,b,c,d){var e={},f=a===mc;function g(h){var i;return e[h]=!0,n.each(a[h]||[],function(a,h){var j=h(b,c,d);return"string"!=typeof j||f||e[j]?f?!(i=j):void 0:(b.dataTypes.unshift(j),g(j),!1)}),i}return g(b.dataTypes[0])||!e["*"]&&g("*")}function sc(a,b){var c,d,e=n.ajaxSettings.flatOptions||{};for(c in b)void 0!==b[c]&&((e[c]?a:d||(d={}))[c]=b[c]);return d&&n.extend(!0,a,d),a}function tc(a,b,c){var d,e,f,g,h=a.contents,i=a.dataTypes;while("*"===i[0])i.shift(),void 0===d&&(d=a.mimeType||b.getResponseHeader("Content-Type"));if(d)for(e in h)if(h[e]&&h[e].test(d)){i.unshift(e);break}if(i[0]in c)f=i[0];else{for(e in c){if(!i[0]||a.converters[e+" "+i[0]]){f=e;break}g||(g=e)}f=f||g}return f?(f!==i[0]&&i.unshift(f),c[f]):void 0}function uc(a,b,c,d){var e,f,g,h,i,j={},k=a.dataTypes.slice();if(k[1])for(g in a.converters)j[g.toLowerCase()]=a.converters[g];f=k.shift();while(f)if(a.responseFields[f]&&(c[a.responseFields[f]]=b),!i&&d&&a.dataFilter&&(b=a.dataFilter(b,a.dataType)),i=f,f=k.shift())if("*"===f)f=i;else if("*"!==i&&i!==f){if(g=j[i+" "+f]||j["* "+f],!g)for(e in j)if(h=e.split(" "),h[1]===f&&(g=j[i+" "+h[0]]||j["* "+h[0]])){g===!0?g=j[e]:j[e]!==!0&&(f=h[0],k.unshift(h[1]));break}if(g!==!0)if(g&&a["throws"])b=g(b);else try{b=g(b)}catch(l){return{state:"parsererror",error:g?l:"No conversion from "+i+" to "+f}}}return{state:"success",data:b}}n.extend({active:0,lastModified:{},etag:{},ajaxSettings:{url:oc,type:"GET",isLocal:hc.test(pc[1]),global:!0,processData:!0,async:!0,contentType:"application/x-www-form-urlencoded; charset=UTF-8",accepts:{"*":nc,text:"text/plain",html:"text/html",xml:"application/xml, text/xml",json:"application/json, text/javascript"},contents:{xml:/xml/,html:/html/,json:/json/},responseFields:{xml:"responseXML",text:"responseText",json:"responseJSON"},converters:{"* text":String,"text html":!0,"text json":n.parseJSON,"text xml":n.parseXML},flatOptions:{url:!0,context:!0}},ajaxSetup:function(a,b){return b?sc(sc(a,n.ajaxSettings),b):sc(n.ajaxSettings,a)},ajaxPrefilter:qc(lc),ajaxTransport:qc(mc),ajax:function(a,b){"object"==typeof a&&(b=a,a=void 0),b=b||{};var c,d,e,f,g,h,i,j,k=n.ajaxSetup({},b),l=k.context||k,m=k.context&&(l.nodeType||l.jquery)?n(l):n.event,o=n.Deferred(),p=n.Callbacks("once memory"),q=k.statusCode||{},r={},s={},t=0,u="canceled",v={readyState:0,getResponseHeader:function(a){var b;if(2===t){if(!f){f={};while(b=gc.exec(e))f[b[1].toLowerCase()]=b[2]}b=f[a.toLowerCase()]}return null==b?null:b},getAllResponseHeaders:function(){return 2===t?e:null},setRequestHeader:function(a,b){var c=a.toLowerCase();return t||(a=s[c]=s[c]||a,r[a]=b),this},overrideMimeType:function(a){return t||(k.mimeType=a),this},statusCode:function(a){var b;if(a)if(2>t)for(b in a)q[b]=[q[b],a[b]];else v.always(a[v.status]);return this},abort:function(a){var b=a||u;return c&&c.abort(b),x(0,b),this}};if(o.promise(v).complete=p.add,v.success=v.done,v.error=v.fail,k.url=((a||k.url||oc)+"").replace(ec,"").replace(jc,pc[1]+"//"),k.type=b.method||b.type||k.method||k.type,k.dataTypes=n.trim(k.dataType||"*").toLowerCase().match(E)||[""],null==k.crossDomain&&(h=kc.exec(k.url.toLowerCase()),k.crossDomain=!(!h||h[1]===pc[1]&&h[2]===pc[2]&&(h[3]||("http:"===h[1]?"80":"443"))===(pc[3]||("http:"===pc[1]?"80":"443")))),k.data&&k.processData&&"string"!=typeof k.data&&(k.data=n.param(k.data,k.traditional)),rc(lc,k,b,v),2===t)return v;i=n.event&&k.global,i&&0===n.active++&&n.event.trigger("ajaxStart"),k.type=k.type.toUpperCase(),k.hasContent=!ic.test(k.type),d=k.url,k.hasContent||(k.data&&(d=k.url+=(dc.test(d)?"&":"?")+k.data,delete k.data),k.cache===!1&&(k.url=fc.test(d)?d.replace(fc,"$1_="+cc++):d+(dc.test(d)?"&":"?")+"_="+cc++)),k.ifModified&&(n.lastModified[d]&&v.setRequestHeader("If-Modified-Since",n.lastModified[d]),n.etag[d]&&v.setRequestHeader("If-None-Match",n.etag[d])),(k.data&&k.hasContent&&k.contentType!==!1||b.contentType)&&v.setRequestHeader("Content-Type",k.contentType),v.setRequestHeader("Accept",k.dataTypes[0]&&k.accepts[k.dataTypes[0]]?k.accepts[k.dataTypes[0]]+("*"!==k.dataTypes[0]?", "+nc+"; q=0.01":""):k.accepts["*"]);for(j in k.headers)v.setRequestHeader(j,k.headers[j]);if(k.beforeSend&&(k.beforeSend.call(l,v,k)===!1||2===t))return v.abort();u="abort";for(j in{success:1,error:1,complete:1})v[j](k[j]);if(c=rc(mc,k,b,v)){v.readyState=1,i&&m.trigger("ajaxSend",[v,k]),k.async&&k.timeout>0&&(g=setTimeout(function(){v.abort("timeout")},k.timeout));try{t=1,c.send(r,x)}catch(w){if(!(2>t))throw w;x(-1,w)}}else x(-1,"No Transport");function x(a,b,f,h){var j,r,s,u,w,x=b;2!==t&&(t=2,g&&clearTimeout(g),c=void 0,e=h||"",v.readyState=a>0?4:0,j=a>=200&&300>a||304===a,f&&(u=tc(k,v,f)),u=uc(k,u,v,j),j?(k.ifModified&&(w=v.getResponseHeader("Last-Modified"),w&&(n.lastModified[d]=w),w=v.getResponseHeader("etag"),w&&(n.etag[d]=w)),204===a||"HEAD"===k.type?x="nocontent":304===a?x="notmodified":(x=u.state,r=u.data,s=u.error,j=!s)):(s=x,(a||!x)&&(x="error",0>a&&(a=0))),v.status=a,v.statusText=(b||x)+"",j?o.resolveWith(l,[r,x,v]):o.rejectWith(l,[v,x,s]),v.statusCode(q),q=void 0,i&&m.trigger(j?"ajaxSuccess":"ajaxError",[v,k,j?r:s]),p.fireWith(l,[v,x]),i&&(m.trigger("ajaxComplete",[v,k]),--n.active||n.event.trigger("ajaxStop")))}return v},getJSON:function(a,b,c){return n.get(a,b,c,"json")},getScript:function(a,b){return n.get(a,void 0,b,"script")}}),n.each(["get","post"],function(a,b){n[b]=function(a,c,d,e){return n.isFunction(c)&&(e=e||d,d=c,c=void 0),n.ajax({url:a,type:b,dataType:e,data:c,success:d})}}),n._evalUrl=function(a){return n.ajax({url:a,type:"GET",dataType:"script",async:!1,global:!1,"throws":!0})},n.fn.extend({wrapAll:function(a){var b;return n.isFunction(a)?this.each(function(b){n(this).wrapAll(a.call(this,b))}):(this[0]&&(b=n(a,this[0].ownerDocument).eq(0).clone(!0),this[0].parentNode&&b.insertBefore(this[0]),b.map(function(){var a=this;while(a.firstElementChild)a=a.firstElementChild;return a}).append(this)),this)},wrapInner:function(a){return this.each(n.isFunction(a)?function(b){n(this).wrapInner(a.call(this,b))}:function(){var b=n(this),c=b.contents();c.length?c.wrapAll(a):b.append(a)})},wrap:function(a){var b=n.isFunction(a);return this.each(function(c){n(this).wrapAll(b?a.call(this,c):a)})},unwrap:function(){return this.parent().each(function(){n.nodeName(this,"body")||n(this).replaceWith(this.childNodes)}).end()}}),n.expr.filters.hidden=function(a){return a.offsetWidth<=0&&a.offsetHeight<=0},n.expr.filters.visible=function(a){return!n.expr.filters.hidden(a)};var vc=/%20/g,wc=/\[\]$/,xc=/\r?\n/g,yc=/^(?:submit|button|image|reset|file)$/i,zc=/^(?:input|select|textarea|keygen)/i;function Ac(a,b,c,d){var e;if(n.isArray(b))n.each(b,function(b,e){c||wc.test(a)?d(a,e):Ac(a+"["+("object"==typeof e?b:"")+"]",e,c,d)});else if(c||"object"!==n.type(b))d(a,b);else for(e in b)Ac(a+"["+e+"]",b[e],c,d)}n.param=function(a,b){var c,d=[],e=function(a,b){b=n.isFunction(b)?b():null==b?"":b,d[d.length]=encodeURIComponent(a)+"="+encodeURIComponent(b)};if(void 0===b&&(b=n.ajaxSettings&&n.ajaxSettings.traditional),n.isArray(a)||a.jquery&&!n.isPlainObject(a))n.each(a,function(){e(this.name,this.value)});else for(c in a)Ac(c,a[c],b,e);return d.join("&").replace(vc,"+")},n.fn.extend({serialize:function(){return n.param(this.serializeArray())},serializeArray:function(){return this.map(function(){var a=n.prop(this,"elements");return a?n.makeArray(a):this}).filter(function(){var a=this.type;return this.name&&!n(this).is(":disabled")&&zc.test(this.nodeName)&&!yc.test(a)&&(this.checked||!T.test(a))}).map(function(a,b){var c=n(this).val();return null==c?null:n.isArray(c)?n.map(c,function(a){return{name:b.name,value:a.replace(xc,"\r\n")}}):{name:b.name,value:c.replace(xc,"\r\n")}}).get()}}),n.ajaxSettings.xhr=function(){try{return new XMLHttpRequest}catch(a){}};var Bc=0,Cc={},Dc={0:200,1223:204},Ec=n.ajaxSettings.xhr();a.attachEvent&&a.attachEvent("onunload",function(){for(var a in Cc)Cc[a]()}),k.cors=!!Ec&&"withCredentials"in Ec,k.ajax=Ec=!!Ec,n.ajaxTransport(function(a){var b;return k.cors||Ec&&!a.crossDomain?{send:function(c,d){var e,f=a.xhr(),g=++Bc;if(f.open(a.type,a.url,a.async,a.username,a.password),a.xhrFields)for(e in a.xhrFields)f[e]=a.xhrFields[e];a.mimeType&&f.overrideMimeType&&f.overrideMimeType(a.mimeType),a.crossDomain||c["X-Requested-With"]||(c["X-Requested-With"]="XMLHttpRequest");for(e in c)f.setRequestHeader(e,c[e]);b=function(a){return function(){b&&(delete Cc[g],b=f.onload=f.onerror=null,"abort"===a?f.abort():"error"===a?d(f.status,f.statusText):d(Dc[f.status]||f.status,f.statusText,"string"==typeof f.responseText?{text:f.responseText}:void 0,f.getAllResponseHeaders()))}},f.onload=b(),f.onerror=b("error"),b=Cc[g]=b("abort");try{f.send(a.hasContent&&a.data||null)}catch(h){if(b)throw h}},abort:function(){b&&b()}}:void 0}),n.ajaxSetup({accepts:{script:"text/javascript, application/javascript, application/ecmascript, application/x-ecmascript"},contents:{script:/(?:java|ecma)script/},converters:{"text script":function(a){return n.globalEval(a),a}}}),n.ajaxPrefilter("script",function(a){void 0===a.cache&&(a.cache=!1),a.crossDomain&&(a.type="GET")}),n.ajaxTransport("script",function(a){if(a.crossDomain){var b,c;return{send:function(d,e){b=n("
-Linear Algebra
-Linear Algebra is a key mathematics field behind computer science and numerical computating. A thorough coverage of this topic is apparently beyond the scope of this book. Please refer to [@strang2006linear] for this subject. In this chapter we will follow the basic structure of this book, first giving you a overall picture, then focussing on how to use the functions provided in Owl to solve problems and better understand some basic linear algebra concepts.
-The high level APIs of Linear Algebra are provided in the Linalg module. The module provides four types of number types: single precision, double precision, complex single precision, and complex double precision. They are included in Linalg.S, Linalg.D, Linalg.C and Linalg.Z modules respectively. Besides, the Linalg.Generic can do everything that S/D/C/Z can but needs some extra type information.
-
-Vectors and Matrices
-The fundamental problem of linear algebra: solving linear equations. This is more efficiently expressed with vectors and matrices. Therefore, we need to first get familiar with these basic structures in Owl.
-Similar to the Linalg module, all the matrix functions can be accessed from the Dense.Matrix module, and support four different type of modules. The Mat module is an alias of Dense.Matrix.D. Except for some functions such as re, most functions are shared by these four submodules. Note that that matrix module is actually built on the Ndarray module, and thus the supported functions are quite similar, and matrices and ndarrays can interoperate with each other. The vectors are expressed using Matrix in Owl.
-
-Creating Matrices
-There are multiple functions to help you in creating an initial matrix to start with.
-
-
Mat.empty 5 5;; (* create a 5 x 5 matrix with initialising elements *)
- Mat.create 5 5 2.;; (* create a 5 x 5 matrix and initialise all to 2. *)
- Mat.zeros 5 5;; (* create a 5 x 5 matrix of all zeros *)
- Mat.ones 5 5;; (* create a 5 x 5 matrix of all ones *)
- Mat.eye 5;; (* create a 5 x 5 identity matrix *)
- Mat.uniform 5 5; (* create a 5 x 5 random matrix of uniform distribution *)
- Mat.uniform_int 5 5;; (* create a 5 x 5 random integer matrix *)
- Mat.sequential 5 5;; (* create a 5 x 5 matrix of sequential integers *)
- Mat.semidef 5;; (* create a 5 x 5 random semi-definite matrix *)
- Mat.gaussian 5 5;; (* create a 5 x 5 random Gaussian matrix *)
- Mat.bernoulli 5 5 (* create a 5 x 5 random Bernoulli matrix *)
-
Owl can create some special matrices with specific properties. For example, a magic square is a n x n matrix (where n is the number of cells on each side) filled with distinct positive integers in the range \(1,2,...,n^{2}\) such that each cell contains a different integer and the sum of the integers in each row, column and diagonal is equal.
-
-
let x = Mat.magic 5;;
->val x : Mat.mat =
->
-> C0 C1 C2 C3 C4
->R0 17 24 1 8 15
->R1 23 5 7 14 16
->R2 4 6 13 20 22
->R3 10 12 19 21 3
->R4 11 18 25 2 9
-
-
We can validate this property with the following code. The summation of all the elements on each column is 65.
-
-
Mat.sum_rows x;;
->- : Mat.mat =
-> C0 C1 C2 C3 C4
->R0 65 65 65 65 65
-
-
You can try the similar sum_cols. The summation of all the diagonal elements is also 65.
-
-
Mat.trace x;;
->- : float = 65.
-
-
Accessing Elements
-Similar to ndarray, the matrix module support set and get to access and modify matrix elements. The only difference is that instead of accessing according to an array, an element in matrix is accessed using two integers.
-
-
let x = Mat.uniform 5 5;;
-Mat.set x 1 2 0.;; (* set the element at (1,2) to 0. *)
-Mat.get x 0 3;; (* get the value of the element at (0,3) *)
-
For dense matrices, i.e., Dense.Matrix.*, you can also use shorthand .%{i; j} to access elements.
-
-
open Mat;;
-x.%{1;2} <- 0.;; (* set the element at (1,2) to 0. *);;
->- : unit = ()
-let a = x.%{0;3};; (* get the value of the element at (0,3) *);;
->val a : float = 0.563556290231645107
-
-
The modifications to a matrix using set are in-place. This is always true for dense matrices. For sparse matrices, the thing can be complicated because of performance issues.
-We can take some rows out of x by calling rows function. The selected rows will be used to assemble a new matrix. Similarly, we can also select some columns using cols.
-
-
-Iterate, Map, Fold, and Filter
-In reality, a matrix usually represents a collections of measurements (or points). We often need to go through these data over and over again for various reasons. Owl provides very convenient functions to help you to iterate these elements. There is one thing I want to emphasise: Owl uses row-major matrix for storage format in the memory, which means accessing rows are much faster than those column operations.
-Let’s first create a 4 x 6 matrix of sequential numbers as below.
-
-
-let x = Mat.sequential 4 6;;
-
-
You should be able to see the following output in your utop.
-
-
- C0 C1 C2 C3 C4 C5
- R0 1 2 3 4 5 6
- R1 7 8 9 10 11 12
- R2 13 14 15 16 17 18
- R3 19 20 21 22 23 24
-
-
Iterating all the elements can be done by using iteri function. The following example prints out all the elements on the screen.
-
-
-Mat.iteri_2d (fun i j a -> Printf.printf "(%i,%i) %.1f\n" i j a) x;;
-
-
If you want to create a new matrix out of the existing one, you need mapi and map function. E.g., we create a new matrix by adding one to each element in x.
-
-
Mat.map ((+.) 1.) x;;
->- : Mat.mat =
->
-> C0 C1 C2 C3 C4 C5
->R0 1 2 3 4 5 6
->R1 7 8 9 10 11 12
->R2 13 14 15 16 17 18
->R3 19 20 21 22 23 24
-
-
Iterating rows and columns are similar to iterating elements, by using iteri_rows, mapi_rows, etc. The following example prints the sum of each row.
-
-
- Mat.iteri_rows (fun i r ->
- Printf.printf "row %i: %.1f\n" i (Mat.sum' r)
- ) x;;
-
-
You can also fold elements, rows, and columns. We can calculate the summation of all column vectors by using fold_cols function.
-
-
- let v = Mat.(zeros (row_num x) 1) in
- Mat.(fold_cols add v x);;
-
-
It is also possible to change a specific row or column. E.g., we make a new matrix out of x by setting row 2 to zero vector.
-
-
- Mat.map_at_row (fun _ -> 0.) x 2;;
-
-
The filter functions is also commonly used in manipulating matrix. Here are some examples. The first one is to filter out the elements in x greater than 20.
-
-
Mat.filter ((<) 20.) x;;
->- : int array = [|21; 22; 23|]
-
-
You can compare the next example which filters out the two-dimensional indices.
-
-
Mat.filteri_2d (fun i j a -> a > 20.) x;;
->- : (int * int) array = [|(3, 3); (3, 4); (3, 5)|]
-
-
The second example is to filter out the rows whose summation is less than 22.
-
-
Mat.filter_rows (fun r -> Mat.sum' r < 22.) x;;
->- : int array = [|0|]
-
-
If we want to check whether there is one or (or all) element in x satisfying some condition, then
-
-
- Mat.exists ((>) 5.) x;; (* is there someone smaller than 5. *)
- Mat.not_exists ((>) 5.) x;; (* is no one smaller than 5. *)
- Mat.for_all ((>) 5.) x;; (* is everyone smaller than 5. *)
-
-
Math Operations
-The math operations can be generally categorised into several groups.
-Comparison Suppose we have two matrices:
-
-
let x = Mat.uniform 2 2;;
-let y = Mat.uniform 2 2;;
-
We can compare the relationship of x and y element-wisely as below.
-
-
- Mat.(x = y);; (* is x equal to y *)
- Mat.(x <> y);; (* is x unequal to y *)
- Mat.(x > y);; (* is x greater to y *)
- Mat.(x < y);; (* is x smaller to y *)
- Mat.(x >= y);; (* is x not smaller to y *)
- Mat.(x <= y);; (* is x not greater to y *)
-
-
All aforementioned infix have their corresponding functions in the module, e.g., =@ has Mat.is_equal.
-Matrix Arithmetic
-The arithmetic operation also heavily uses infix. Similar to matrix comparison, each infix has its corresponding function in the module.
-
-
- Mat.(x + y);; (* add two matrices *)
- Mat.(x - y);; (* subtract y from x *)
- Mat.(x * y);; (* element-wise multiplication *)
- Mat.(x / y);; (* element-wise division *)
- Mat.(x *@ y);; (* dot product of x and y *)
-
-
If you do match between a matrix and a scalar value, you need to be careful about their order. Please see the examples below. In the following examples, x is a matrix as we used before, and a is a float scalar value.
-
-
let a = 2.5;;
-
- Mat.(x +$ a);; (* add a to every element in x *)
- Mat.(a $+ x);; (* add a to every element in x *)
-
-
Similarly, we have the following examples for other math operations.
-
-
- Mat.(x -$ a);; (* sub a from every element in x *)
- Mat.(a $- x);;
- Mat.(x *$ a);; (* mul a with every element in x *)
- Mat.(a $* x);;
- Mat.(x /$ a);; (* div a to every element in x *)
- Mat.(a $/ x);;
- Mat.(x **$ a);; (* power of every element in x *)
-
-
There are some ready-made math functions such as Mat.log and Mat.abs ect. to ease your life when operating matrices. These math functions apply to every element in the matrix.
-There are other functions such as concatenation:
-
-
Mat.(x @= y);; (* concatenate x and y vertically *)
- Mat.(x @|| y);; (* concatenate x and y horizontally *)
-
Gaussian Elimination
-Solving linear equations systems is the core problem in Linear Algebra and is frequently used in scientific computation. Gaussian Elimination is a classic method to do that. With a bit of techniques, elimination works surprisingly well in modern numerical libraries as one way of implementation. Here is a simple example.
-\[2x_1 + 2x_2 + 2x_3 = 4\] \[2x_1 + 2x_2 + 3x_3 = 5\] {#eq:linear-algebra:gauss01} \[3w_1 + 4x_2 + 5x_3 = 7\]
-Divide the first equation by 2:
-\[x_1 + x_2 + x_3 = 2\] \[2x_1 + 2x_2 + 3x_3 = 5\] {#eq:linear-algebra:gauss02} \[3w_1 + 4x_2 + 5x_3 = 7\]
-Multiply the first equation by -2, then add it to the second one. Also, multiply the first equation by -3, then add it to the third one. We have:
-\[x_1 + x_2 + x_3 = 2\] \[x_3 = 1\] {#eq:linear-algebra:gauss03} \[x_2 + 2x_3 = 1\]
-Finally, swap the second and third line:
-\[x_1 + x_2 + x_3 = 2\] \[x_2 + 2x_3 = 1\] {#eq:linear-algebra:gauss04} \[x_3 = 1\]
-Here \(x_3 = 1\), and we can put it back in the second equation and get \(x_2 = -1\). Put both back to the first equation and we have \(x_1 = 2\)
-This process demonstrate the basic process of elimination: eliminate unknown variables until this group of linear equations is easy to solve, and then do the back-substitution. There are three kinds of basic operations we can use: multiplication, adding one line to another, and swap two lines.
-The starting [@eq:linear-algebra:gauss01] can be more concisely expressed with vector:
-\[x_1\left[\begin{matrix}2\\2\\3\end{matrix} \right] + x_2\left[\begin{matrix}2\\2\\4\end{matrix} \right] + x_3\left[\begin{matrix}2\\3\\5\end{matrix} \right] = \left[\begin{matrix}4\\5\\7\end{matrix} \right]\]
-or it can be expressed as \(Ax=b\) using matrix notation.
-\[
-\left[\begin{matrix}2 & 2 & 2\\2 & 2 & 3\\3 & 4 & 5\end{matrix} \right] \left[\begin{matrix}x_1\\x_2\\x_3\end{matrix} \right] = \left[\begin{matrix}4\\5\\7\end{matrix} \right]
-\Longrightarrow
-\left[\begin{matrix}x_1\\x_2\\x_3\end{matrix} \right] = \left[\begin{matrix}2\\-1\\1\end{matrix} \right]
-\]
-Here A is a matrix, b is a column vector, and x is the unknown vector. The matrix notation is often used to describe the linear equation systems as a concise way.
-
-LU Factorisation
-Let’s check the gaussian elimination example again. The final form in [@eq:linear-algebra:gauss04] can be expressed with the matrix notation as:
-\[\left[\begin{matrix}1 & 1 & 1\\0 & 1 & 2\\0 & 0 & 1\end{matrix} \right]\]
-Here all the elements below the diagonal of this square matrix is zero. Such matrix is called an upper triangular matrix, usually denoted by \(U\). Similarly, a square matrix that all the elements below the diagonal of this square matrix is zero is called lower triangular matrix, denoted by \(L\). We can use the is_triu and is_tril to verify if a matrix is triangular.
-The diagonal elements of \(U\) are called pivots. The i-th pivot is the coefficient of the i-th variable in the i-th equation at the i-th step during the elimination.
-In general, a square matrix can often be factorised into the dot product of a lower and a upper triangular matrices: \(A = LU\). It is called the LU factorisation. It embodies the process of Gauss elimination. Back to the initial problem of solving the linear equation \(Ax=b\). One reason the LU Factorisation is important is that if the matrix A in \(Ax=b\) is triangular, then solving it would be straightforward, as we have seen in the previous example. Actually, we can use triangular_solve to efficiently solve the linear equations if we already know that the matrix is triangular.
-For a normal square matrix that can be factorised into \(LU\), we can change \(Ax=b\) to \(LUx=b\). First we can find column vector \(c\) so that \(Lc=b\), then we can find \(x\) so that \(Ux=c\). Both triangular equations are easy to solve.
-We use the lu function to perform the LU factorisation. Let’s use the previous example.
-
-
let a = [|2.;2.;2.;2.;2.;3.;3.;4.;5.|];;
->val a : float array = [|2.; 2.; 2.; 2.; 2.; 3.; 3.; 4.; 5.|]
-let a = Arr.of_array a [|3; 3|];;
->val a : Arr.arr =
-> C0 C1 C2
->R0 2 2 2
->R1 2 2 3
->R2 3 4 5
-
-
-
let l, u, p = Linalg.D.lu a;;
->val l : Linalg.D.mat =
->
-> C0 C1 C2
->R0 1 0 0
->R1 0.666667 1 0
->R2 0.666667 1 1
->
->val u : Linalg.D.mat =
->
-> C0 C1 C2
->R0 3 4 5
->R1 0 -0.666667 -0.333333
->R2 0 0 -1
->
->val p : Linalg.D.int32_mat =
-> C0 C1 C2
->R0 3 2 3
-
-
The first two returned matrix are the lower and upper triangular matrices. However, if we try to check the correctness of this factorisation with dot product, the result does not fit:
-
-
let a' = Mat.dot l u;;
->val a' : Mat.mat =
-> C0 C1 C2
->R0 3 4 5
->R1 2 2 3
->R2 2 2 2
-
-
-
a' = a;;
->- : bool = false
-
-
It turns out that we need to some extra row exchange to get the right answer. That’s because the row exchange is required in certain cases, such as when the number we want to use as the pivot could be zero. This process is called pivoting. It is closely related to the numerical computation stability. Choosing the improper pivots can lead to wrong linear system solution. It can be expressed with a permutation matrix that has the same rows as the identity matrix, each row and column has exactly one “1” element. The full LU factorisation can be expressed as:
-\[PA = LU.\]
-
-
let p = Mat.of_array [|0.;0.;1.;0.;1.;0.;1.;0.;0.|] 3 3;;
->val p : Mat.mat =
-> C0 C1 C2
->R0 0 0 1
->R1 0 1 0
->R2 1 0 0
-
-
-
Mat.dot p a = Mat.dot l u;;
->- : bool = true
-
-
How do we translate the third output, the permutation vector, to the required permutation matrix? Each element \(p_i\) in the vector represents a updated identity matrix. On this identity matrix, we set (i, i) and (\(p_i\), \(p_i\)) to zero, and then (i, \(p_i\)) and (\(p_i\), i) to one. Multiply these \(n\) matrices, we can get the permutation matrix \(P\). Here is a brief implementation of this process in OCaml:
-
-
let perm_vec_to_mat vec =
- let n = Array.length vec in
- let mat = ref (Mat.eye n) in
- for i = n - 1 downto 0 do
- let j = vec.(i) in
- let a = Mat.eye n in
- Arr.set a [| i; i |] 0.;
- Arr.set a [| j; j |] 0.;
- Arr.set a [| i; j |] 1.;
- Arr.set a [| j; i |] 1.;
- mat := Arr.dot a !mat
- done;
- !mat
-
Note that there is more than one way to do the LU factorisation. For example, for the same matrix, we can have:
-\[\left[\begin{matrix}1 & 0 & 0\\0 & 0 & 1\\0 & 1 & 0\end{matrix} \right] \left[\begin{matrix}2 & 2 & 2\\2 & 2 & 3\\3 & 4 & 5\end{matrix} \right] = \left[\begin{matrix}1 & 0 & 0\\1.5 & 1 & 0\\1 & 0 & 1\end{matrix} \right] \left[\begin{matrix}2 & 2 & 2\\0 & 1 & 2\\0 & 0 & 1\end{matrix} \right]\]
-
-
-Inverse and Transpose
-The concept of inverse matrix is related with the identity matrix, which can be built with \(Mat.eye n\), where n is the size of the square matrix. The identity matrix is a special form of Diagonal Matrix, which is a square matrix that only contains non-zero element along its diagonal. You can check if a matrix is diagonal with is_diag function.
-
-
Mat.eye 5 |> Linalg.D.is_diag
-
The inverse of a \(n\) by \(n\) square matrix \(A\) is denoted by $A^{-1}, so that $: \(AA^{-1} = I_n\). Note that not all square matrix has inverse.
-There are many sufficient and necessary conditions to decide if \(A\) is invertible, one of them is that A has \(n\) pivots.
-We use function inv to do the inverse operation. It’s straightforward and easy to verify according to the definition. Here we use the semidef function to produce a matrix that is certainly invertible.
-
-
let x = Mat.semidef 5;;
->val x : Mat.mat =
->
-> C0 C1 C2 C3 C4
->R0 2.56816 1.0088 1.57793 2.6335 2.06612
->R1 1.0088 0.441613 0.574465 1.02067 0.751004
->R2 1.57793 0.574465 2.32838 2.41251 2.13926
->R3 2.6335 1.02067 2.41251 3.30477 2.64877
->R4 2.06612 0.751004 2.13926 2.64877 2.31124
-
-
-
let y = Linalg.D.inv x;;
->val y : Linalg.D.mat =
->
-> C0 C1 C2 C3 C4
->R0 12.229 -15.606 6.12229 -1.90254 -9.34742
->R1 -15.606 33.2823 -4.01361 -4.96414 12.5403
->R2 6.12229 -4.01361 7.06372 -2.62899 -7.69399
->R3 -1.90254 -4.96414 -2.62899 8.1607 -3.60533
->R4 -9.34742 12.5403 -7.69399 -3.60533 15.9673
-
-
-
Mat.(x *@ y =~ eye 5);;
->- : bool = true
-
-
The next frequently used special matrix is the Transpose Matrix. Denoted by \(A^T\), its \(i\)th row is taken from the \(i\)-th column of the original matrix A. It has properties such as \((AB)^T=B^T~A^T\). We can check this property using the matrix function Mat.transpose. Note that this function is deemed basic ndarray operations and is not included in the Linalg module.
-
-
let flag =
- let a = Mat.uniform 4 4 in
- let b = Mat.uniform 4 4 in
- let m1 = Mat.(dot a b |> transpose) in
- let m2 = Mat.(dot (transpose b) (transpose a)) in
- Mat.(m1 =~ m2);;
->val flag : bool = true
-
-
A related special matrix is the Symmetric Matrix, which equals to its own transpose. This simple test can be done with the is_symmetric function.
-
-
-
-Vector Spaces
-We have talked about solving the \(Ax=b\) linear equations with elimination, and A is a square matrix. Now we need to further discuss, how do we know if there exists one or maybe more than one solution. To answer such question, we need to be familiar with the concepts of vector space.
-A vector space, denoted by \(R^n\), contains all the vectors that has \(n\) elements. In this vector space we have the add and multiplication operation. Applying them to the vectors is called linear combination. Then a subspace in a vector space is a non-empty set that linear combination of the vectors in this subspace still stays in the same subspace.
-There are four fundamental subspaces concerning solving linear systems \(Ax=b\), where \(A\) is a \(m\) by \(n\) matrix. The column space consists of all the linear combinations of the columns of A. It is a subspace of \(R^m\). Similarly, the row space consists of all the linear combinations of the rows of A. The nullspace contains all the vectors \(x\) so that \(Ax=0\), denoted by \(N(A)\). It is a subspace of \(R^n\). The left nullspace is similar. It is the nullspace of \(A^T\).
-
-Rank and Basis
-In the Gaussian Elimination section, we assume an ideal situation: the matrix A is \(n\times~n\) square, and we assume that there exists one solution. But that does not happen every time. In many cases \(A\) is not an square matrix. It is possible that these \(m\) equations are not enough to solve a \(n\)-variable linear system when \(m < n\). Or there might not exist a solution when \(m > n\). Besides, even it is a square matrix, the information provided by two of the equations are actually repeated. For example, one equation is simply a multiplication of the other.
-For example, if we try to apply LU factorisation to such a matrix:
-
-
let x = Mat.of_array [|1.; 2.; 3.; 0.; 0.; 1.; 0.; 0.; 2.|] 3 3;;
->val x : Mat.mat =
-> C0 C1 C2
->R0 1 2 3
->R1 0 0 1
->R2 0 0 2
-
-
-
Linalg.D.lu x;;
->Exception: Failure "LAPACKE: 2".
-
-
Obviously, we cannot have pivot in the second column, and therefore this matrix is singular and cannot be factorised into \(LU\). As can be seen in this example, we cannot expect the linear algebra functions to be a magic lamb and do our bidding every time. Understanding the theory of linear algebra helps to better understand how these functions work.
-To decide the general solutions to \(Ax=b\), we need to understand the concept of rank. The rank of a matrix is the number of pivots in the elimination process. To get a more intuitive understanding of rank, we need to know the concept of *linear independent. In a linear combination \(\sum_{i=1}^nc_iv_i\) where \(v_i\) are vectors and \(c_i\) are numbers, if \(\sum_{i=1}^nc_iv_i = 0\) only happens when \(c_i = 0\) for all the \(i\)’s, then the vectors \(v_1, v_2, \ldots, v_n\) are linearly independent. Then the rank of a matrix is the number of independent rows in the matrix. We can understand rank as the number of “effective” rows in the matrix.
-As an example, we can check the rank of the previous matrix.
-
-As can be example, the rank is 2, which means only two effective rows, and thus cannot be factorised to find the only solution.
-One application of rank is in a crucial linear algebra idea: basis. A sequence of vectors is the basis of a space or subspace if: 1) these vectors are linear independent and 2) all the the vectors in the space can be represented as the linear combination of vectors in the basis.
-A space can have infinitely different bases, but the number of vectors in these bases are the same. This number is called the dimension of this vector space. For example, a \(m\) by \(n\) matrix A has rank of \(r\), then the dimension of its null space is \(n-r\), and the dimension of its column space is \(r\). Think about a full-rank matrix where \(r=n\), then the dimension of column matrix is \(n\), which means all its columns can be a basis of the column space, and that the null space dimension is zero so that the only solution of \(Ax=0\) is a zero vector.
-
-
-Orthogonality
-We can think of the basis of a vector space as the Cartesian coordinate system in a three-dimensional space, where every vector in the space can be represented with the three vectors ni the space: the x, y and z axis. Actually, we can use many three vectors system as the coordinate bases, but the x. y, z axis is used is because they are orthogonal to each other. An orthogonal basis can greatly reduce the complexity of problems. The same can be applied in the basis of vector spaces.
-Orthogonality is not limited to vectors. Two vectors \(a\) and \(b\) are orthogonal are orthogonal if \(a^Tb = 0\). Two subspaces A and B are orthogonal if every vector in A is orthogonal to every vector in B. For example, the nullspace and row space of a matrix are perpendicular to each other.
-Among the bases of a subspace, if every vector is perpendicular to each other, it is called an orthogonal matrix. Moreover, if the length of each vector is normalised to one unit, it becomes the orthonormal basis.
-For example, we can use the null function to find an orthonormal basis vector \(x\) or the null space of a matrix, i.e. \(Ax=0\).
-
-
let a = Mat.magic 4;;
->val a : Mat.mat =
->
-> C0 C1 C2 C3
->R0 1 15 14 4
->R1 12 6 7 9
->R2 8 10 11 5
->R3 13 3 2 16
-
-
-
let x = Linalg.D.null a;;
->val x : Linalg.D.mat =
->
-> C0
->R0 0.223607
->R1 0.67082
->R2 -0.67082
->R3 -0.223607
-
-
-
Mat.dot a x |> Mat.l2norm';;
->- : float = 3.7951119214201712e-15
-
-
Now that we know what is orthogonal basis, the next question is, how to build one? The QR Factorisation is used to construct orthogonal basis in a subspace. Specifically, it decomposes a matrix A into the product of an orthogonal matrix Q and an upper triangular matrix R, i.e. A = QR. It is provided in the linear algebra module.
-
-
val qr : ?thin:bool -> ?pivot:bool -> ('a, 'b) t -> ('a, 'b) t * ('a, 'b) t * (int32, int32_elt) t
-
The qr x function calculates QR decomposition for an m by n matrix x. The function returns a 3-tuple, the first two are Q and R, and the third is the permutation vector of columns. The default value of parameter pivot is false, setting pivot to true lets qr performs pivoted factorisation. Note that the returned indices are not adjusted to 0-based C layout. By default, qr performs a reduced QR factorisation, full factorisation can be enabled by setting thin parameter to false.
-
-
let a = Mat.of_array [|12.; -51.; 4.; 6.; 167.; -68.; -4.; 24.; -41.|] 3 3;;
->val a : Mat.mat =
->
-> C0 C1 C2
->R0 12 -51 4
->R1 6 167 -68
->R2 -4 24 -41
-
-
-
let q, r, _ = Linalg.D.qr a;;
->val q : Linalg.D.mat =
->
-> C0 C1 C2
->R0 -0.857143 0.394286 0.331429
->R1 -0.428571 -0.902857 -0.0342857
->R2 0.285714 -0.171429 0.942857
->
->val r : Linalg.D.mat =
->
-> C0 C1 C2
->R0 -14 -21 14
->R1 0 -175 70
->R2 0 0 -35
-
-
Solving Ax = b
-We can now discuss the general solution structure to \(Ax=0\) and \(Ax=b\). Again, here \(A\) is a \(m\times~n\) matrix. The theorems declare that, there exists non-zero solution(s) to \(Ax=0\) if and only if \(\textrm{rank}(a) <= n\). If \(r(A) < n\), then the nullspace of \(A\) is of dimension \(n - r\) and the \(n-r\) orthogonal basis can be found with null function. Here is an example.
-
-
let a = Mat.of_array [|1.;5.;-1.;-1.;1.;-2.;1.;3.;3.;8.;-1.;1.;1.;-9.;3.;7.|] 4 4;;
->val a : Mat.mat =
->
-> C0 C1 C2 C3
->R0 1 5 -1 -1
->R1 1 -2 1 3
->R2 3 8 -1 1
->R3 1 -9 3 7
-
-
-
Linalg.D.rank a;;
->- : int = 2
-
-
This a rank 2 matrix, so the nullspace contains 4 - 2 = 2 vectors:
-
-
Linalg.D.null a;;
->- : Linalg.D.mat =
->
-> C0 C1
->R0 -0.495995 0.692163
->R1 0.0375596 -0.306931
->R2 -0.747852 -0.610728
->R3 0.439655 -0.231766
-
-
These two vectors are called the fundamental system of solutions of \(Ax=0\). All the solutions of \(Ax=0\) can then be expressed using the fundamental system:
-\[c_1\left[\begin{matrix}-0.85 \\ 0.27 \\ 0.07 \\0.44\end{matrix} \right] + c_2\left[\begin{matrix}0.013\\ 0.14 \\ 0.95 \\-0.23\end{matrix} \right]\]
-Here \(c_1\) and \(c_2\) can be any constant numbers.
-For solving the general form \(Ax=b\) where b is \(m\times~1\) vector, there exist only one solution if and only if \(\textrm{rank}(A) = \textrm{rank}([A, b]) = n\). Here \([A, b]\) means concatenating \(A\) and \(b\) along the column. If \(\textrm{rank}(A) = \textrm{rank}([A, b]) < n\), \(Ax=b\) has infinite number of solutions. These solutions has a general form:
-\[x_0 + c_1x_1 + c2x2 + \ldots +c_kx_k\]
-Here \(x_0\) is a particular solution to \(Ax=b\), and \(x_1, x_2, \ldots, x_k\) are the fundamental solution system of \(Ax=0\).
-We can use linsolve function to find one particular solution. In the Linear Algebra, the function linsolve a b -> x solves a linear system of equations a * x = b. By default, the function uses LU factorisation with partial pivoting when a is square and QR factorisation with column pivoting otherwise. The number of rows of a must be equal to the number of rows of b. If a is a upper or lower triangular matrix, the function calls the solve_triangular function.
-Here is an example.
-
-
let a = Mat.of_array [|2.;3.;1.;1.;-2.;4.;3.;8.;-2.;4.;-1.;9.|] 4 3;;
->val a : Mat.mat =
->
-> C0 C1 C2
->R0 2 3 1
->R1 1 -2 4
->R2 3 8 -2
->R3 4 -1 9
-
-
-
let b = Mat.of_array [|4.;-5.;13.;-6.|] 4 1;;
->val b : Mat.mat =
-> C0
->R0 4
->R1 -5
->R2 13
->R3 -6
-
-
-
let x0 = Linalg.D.linsolve a b;;
->val x0 : Owl_dense_matrix_d.mat =
->
-> C0
->R0 -3.97999
->R1 3.48999
->R2 1.48999
-
-
Then we use null to find the fundamental solution system. You can verify that matrix a is of rank 2, so that the solution system for \(ax=0\) should contain only 3 - 2 = 1 vector.
-
-
let x1 = Linalg.D.null a;;
->val x1 : Owl_dense_matrix_d.mat =
->
-> C0
->R0 -0.816497
->R1 0.408248
->R2 0.408248
-
-
So the solutions to \(Ax=b\) can be expressed as:
-\[\left[\begin{matrix}-1 \\ 2 \\ 0 \end{matrix} \right] + c_1\left[\begin{matrix}-0.8\\ 0.4 \\ 0.4 \end{matrix} \right]\]
-So the takeaway from this chapter is that the using these linear algebra functions often requires solid background knowledge. Blindly using them could leads to wrong or misleading answers.
-
-
-Matrix Sensitivity
-The sensitivity of a matrix is perhaps not the most important issue in the traditional linear algebra, but is crucial in the numerical computation related problems. It answers this question: in \(Ax=b\), if we change the \(A\) and \(b\) slightly, how much will the \(x\) be affected? The Condition Number is a measurement of the sensitivity of a square matrix.
-First, we need to understand the Norm of a matrix. The norm, or 2-norm of a matrix \(\|A\|\) is calculated as square root of the maximum eigenvalue of \(A^HA\). The norm of a matrix is a upper limit so that for any \(x\) we can be certain that \(\|Ax\| \leq \|A\|\|x\|\). Here \(\|Ax\|\) and \(\|x\|\) are the L2-Norm for vectors. The $|A|$ bounds the how large the \(A\) can amplify the input \(x\). We can calculate the norm with norm in the linear algebra module.
-The most frequently used condition number is that represent the sensitivity of inverse matrix. With the definition of norm, the condition number for inversion of a matrix can be expressed as \(\|A\|\|A^{-1}\|\). We can calculate it using the cond function.
-Let’s look at an example:
-
-
let a = Mat.of_array [|4.1; 2.8; 9.7; 6.6 |] 2 2;;
->val a : Mat.mat =
-> C0 C1
->R0 4.1 2.8
->R1 9.7 6.6
-
-
-
let c = Linalg.D.cond a;;
->val c : float = 1622.99938385646283
-
-
Its condition number for inversion is much larger than one. Therefore, a small change in \(A\) should leads to a large change of \(A^{-1}\).
-
-
let a' = Linalg.D.inv a;;
->val a' : Linalg.D.mat =
-> C0 C1
->R0 -66 28
->R1 97 -41
-
-
-
let a2 = Mat.of_array [|4.1; 2.8; 9.67; 6.607 |] 2 2;;
->val a2 : Mat.mat =
-> C0 C1
->R0 4.1 2.8
->R1 9.67 6.607
-
-
-
let a2' = Linalg.D.inv a2;;
->val a2' : Linalg.D.mat =
->
-> C0 C1
->R0 520.236 -220.472
->R1 -761.417 322.835
-
-
We can see that by changing the matrix by only a tiny bit, the inverse of \(A\) changes dramatically, and so is the resulting solution vector \(x\).
-
-
-
-Determinants
-Other than pivots, another basic quantity in linear algebra is the determinants. For a square matrix A:
-\[\left[\begin{matrix}a_{11} & a_{12} & \ldots & a_{1n} \\ a_{21} & a_{22} & \ldots & a_{2n} \\ \vdots & \vdots & \ldots & \vdots \\ a_{n1} & a_{n2} & \ldots & a_{nn} \end{matrix} \right]\]
-its determinants det(A) is defined as:
-\[\sum_{j_1~j_2~\ldots~j_n}(-1)^{\tau(j_1~j_2~\ldots~j_3)}a_{1{j_1}}a_{2j_2}\ldots~a_{nj_n}.\]
-Here \(\tau(j_1~j_2~\ldots~j_n) = i_1 + i_2 + \ldots + i_{n-1}\), where \(i_k\) is the number of \(j_p\) that is smaller than \(j_k\) for \(p \in [k+1, n]\).
-Mathematically, there are many techniques that can be used to simplify this calculation. But as far as this book is concerned, it is sufficient for us to use the det function to calculate the determinants of a matrix.
-Why is the concept of determinant important? Its most important application is to using determinant to decide if a square matrix A is invertible or singular. The determinant \(\textrm{det}(A) \neq 0\) if and only if \(\textrm{A} = n\). Also it can be expressed as \(\textrm{det}(A) \neq 0\) if and only if matrix A is invertible.
-We can also use it to understand the solution of \(Ax=b\): if \(\textrm{det}(A) \neq 0\), then \(Ax=b\) has one and only one solution. This theorem is part of the Cramer’s rule. These properties are widely used in finding eigenvalues. As will be shown in the next section.
-Since sometimes we only care about if the determinant is zero or not, instead of the value itself, we can also use a similar function logdet. It computes the logarithm of the determinant, but it avoids the possible overflow or underflow problems in computing determinant of large matrices.
-
-
let x = Mat.magic 5;;
->val x : Mat.mat =
->
-> C0 C1 C2 C3 C4
->R0 17 24 1 8 15
->R1 23 5 7 14 16
->R2 4 6 13 20 22
->R3 10 12 19 21 3
->R4 11 18 25 2 9
-
-
-
Linalg.D.det x;;
->- : float = 5070000.
-Linalg.D.logdet x;;
->- : float = 15.4388513755673671
-
-
Eigenvalues and Eigenvectors
-
-Solving \(Ax=\lambda~x\)
-Now we need to change the topic from \(Ax=b\) to \(Ax=\lambda~x\). For an \(n\times~n\) square matrix, if there exist number \(\lambda\) and non-zero column vector \(x\) to satisfy:
-\[(\lambda~I - A)x = 0,\]{#eq:linear-algebra:eigen}
-then \(\lambda\) is called eigenvalue, and \(x\) is called the eigenvector of \(A\).
-To find the eigenvalues of A, we need to find the roots of the determinant of \(\lambda~I - A\). \(\textrm{det}(\lambda~I - A) = 0\) is called the characteristic equation. For example, for
-\[A = \left[\begin{matrix}3 & 1 & 0 \\ -4 & -1 & 0 \\ 4 & -8 & 2 \end{matrix} \right]\]
-Its characteristic matrix \(\lambda~I - A\) is:
-\[\left[\begin{matrix}\lambda-3 & 1 & 0 \\ -4 & \lambda+1 & 0 \\ 4 & -8 & \lambda-2 \end{matrix} \right]\]
-According to the definition of determinant,
-\[\textrm{det}(\lambda~I - A) = (\lambda-1)^2(\lambda-2) = 0.\]
-According to the theory of polynomials, this characteristic polynomials has and only has \(n\) roots in the complex space. Specifically, here we have three eigenvalues: \(\lambda_1=1, \lambda_2 = 1, \lambda=2\).
-Put \(\lambda_1\) back to characteristic equation, we have: \((I - A)x = 0\). Therefore, we can find the fundamental solution system of \(I - A\) with:
-
-
let basis =
- let ia = Mat.((eye 3) - (of_array [|3.;1.;0.;-4.;-1.;0.;4.;-8.;2.|] 3 3)) in
- Linalg.D.null ia;;
->val basis : Owl_dense_matrix_d.mat =
->
-> C0
->R0 -0.0496904
->R1 0.0993808
->R2 0.993808
-
-
We have a fundamental solution \(x_0 = [-0.05, 0.1, 1]^T\). Therefore all the \(k_0x_0\) are the corresponding eigenvector of the eigenvalue \(1\). Similarly, we can calculate that eigenvectors for the eigenvalue \(2\) are \(k_1[0, 0, 1]^T\).
-We can use eig to find the eigenvectors and eigenvalues of a matrix. eig x -> v, w computes the right eigenvectors v and eigenvalues w of an arbitrary square matrix x. The eigenvectors are column vectors in v, their corresponding eigenvalues have the same order in w as that in v.
-
-
let eigvec, eigval =
- let a = Mat.of_array [|3.;1.;0.;-4.;-1.;0.;4.;-8.;2.|] 3 3 in
- Linalg.D.eig a;;
->val eigvec : Owl_dense_matrix_z.mat =
->
-> C0 C1 C2
->R0 (0, 0i) (-0.0496904, 3.56977E-10i) (-0.0496904, -3.56977E-10i)
->R1 (0, 0i) (0.0993808, -1.30892E-09i) (0.0993808, 1.30892E-09i)
->R2 (1, 0i) (0.993808, 0i) (0.993808, 0i)
->
->val eigval : Owl_dense_matrix_z.mat =
->
-> C0 C1 C2
->R0 (2, 0i) (1, 1.19734E-08i) (1, -1.19734E-08i)
-
-
Note that the result are expressed as complex numbers. If we only want the eigenvalues, we can use the eigvals function. Both functions provide the boolean permute and scale arguments to indicate whether the input matrix should be permuted and/or diagonally scaled. One reason that eigenvalue and eigenvector are important is that the pattern \(Ax=\lambda~x\) frequently appears in scientific and engineering analysis to describe the change of dynamic system over time.
-
-
-Complex Matrices
-As can be seen in the previous example, complex matrices are frequently used in eigenvalues in eigenvectors. In this section we re-introduce some previous concepts in the complex space.
-We have seen the Symmetric Matrix. It can be extended to the complex numbers, called Hermitian Matrix, denoted by \(A^H\). Instead of requiring it to be the same as its transpose, a hermitian matrix equals to its conjugate transpose. A conjugate transpose means that during transposing, each element \(a+bi\) changes to its conjugate \(a-bi\). Hermitian is thus a generalisation of the symmetric matrix. We can use the is_hermitian function to check if a matrix is hermitian, as can be shown in the next example.
-
-
let a = Dense.Matrix.Z.of_array [|{re=1.; im=0.}; {re=2.; im=(-1.)}; {re=2.; im=1.}; {re=3.; im=0.}|] 2 2;;
->val a : Dense.Matrix.Z.mat =
->
-> C0 C1
->R0 (1, 0i) (2, -1i)
->R1 (2, 1i) (3, 0i)
-
-
-
Linalg.Generic.is_hermitian a;;
->- : bool = true
-
-
We can use the conj function of a complex matrix to perform the conjugate transpose:
-
-
Dense.Matrix.Z.(conj a |> transpose);;
->- : Dense.Matrix.Z.mat =
->
-> C0 C1
->R0 (1, -0i) (2, -1i)
->R1 (2, 1i) (3, -0i)
-
-
A theorem declares that if a matrix is hermitian, then for all complex vectors \(x\), \(x^HAx\) is real, and every eigenvalue is real.
-
-
Linalg.Z.eigvals a;;
->- : Linalg.Z.mat =
->
-> C0 C1
->R0 (-0.44949, -5.06745E-17i) (4.44949, 5.06745E-17i)
-
-
A related concept is the Unitary Matrix. A matrix \(U\) is unitary if \(U^HU=I\). The inverse and conjugate transpose of \(U\) are the same. It can be compared to the orthogonal vectors in the real space.
-
-
-Similarity Transformation and Diagonalisation
-For a \(nxn\) matrix A, and any invertible \(nxn\) matrix M, the matrix \(B = M^{-1}AM\) is similar to A. One important property is that similar matrices share the same eigenvalues. The intuition is that, think of M as the change of basis matrix, and A itself is a linear transformation, so \(M^{-1}AM\) means changing the basis first, applying the linear transformation, and then change the basis back. Therefore, changing from A to B actually changes the linear transformation using one set of basis to another.
-In a three dimensional space, if we can change using three random vectors as the basis of linear transformation to using the standard basis \([1, 0, 0]\), \([0, 1, 0]\), \([0, 0, 1]\), the related problem can be greatly simplified. Finding the suitable similar matrix is thus important in simplifying the calculation in many scientific and engineering problems.
-One possible kind of simplification is to find a triangular matrix as similar. The Schur’s Lemma declares that A can be decomposed into \(UTU^{-1}\) where \(U\) is a unitary function, and T is an upper triangular matrix.
-
-
let a = Dense.Matrix.Z.of_array [|{re=1.; im=0.}; {re=1.; im=0.}; {re=(-2.); im=0.}; {re=3.; im=0.}|] 2 2;;
->val a : Dense.Matrix.Z.mat =
->
-> C0 C1
->R0 (1, 0i) (1, 0i)
->R1 (-2, 0i) (3, 0i)
-
-
-
let t, u, eigvals = Linalg.Z.schur a;;
->val t : Linalg.Z.mat =
->
-> C0 C1
->R0 (2, 1i) (-2.21283, -0.321545i)
->R1 (0, 0i) (2, -1i)
->
->val u : Linalg.Z.mat =
->
-> C0 C1
->R0 (-0.408248, 0.408248i) (-0.775215, 0.256337i)
->R1 (-0.816497, 0i) (0.515776, 0.259439i)
->
->val eigvals : Linalg.Z.mat =
-> C0 C1
->R0 (2, 1i) (2, -1i)
-
-
The returned result t is apparent a upper triangular matrix, and the u can be verified to be a unitary matrix:
-
-
Dense.Matrix.Z.(dot u (conj u |> transpose));;
->- : Dense.Matrix.Z.mat =
->
-> C0 C1
->R0 (1, -1.70126E-17i) (7.12478E-17, 7.4864E-17i)
->R1 (7.12478E-17, -8.63331E-17i) (1, 7.21217E-18i)
-
-
Another very important similar transformation is diagonalisation. Suppose A has \(n\) linear-independent eigenvectors, and make them the columns of a matrix Q, then \(Q^{-1}AQ\) is a diagonal matrix \(\Lambda\), and the eigenvalues of A are the diagonal elements of \(\Lambda\). It’s inverse \(A = Q\Lambda~Q^{-1}\) is called Eigendecomposition. Analysing A’s diagonal similar matrix \(\Lambda\) instead of A itself can greatly simplify the problem.
-Not every matrix can be diagonalised. If any two of the \(n\) eigenvalues of A are not the same, then its \(n\) eigenvectors are linear-independent ana thus A can be diagonalised. Specifically, every real symmetric matrix can be diagonalised by an orthogonal matrix. Or put into the complex space, every hermitian matrix can be diagonalised by a unitary matrix.
-
-
-
-Positive Definite Matrices
-
-Positive Definiteness
-In this section we introduce the concept of Positive Definite Matrix, which unifies the three most basic ideas in linear algebra: pivots, determinants, and eigenvalues.
-A matrix is called Positive Definite if it is symmetric and that \(x^TAx > 0\) for all non-zero vectors \(x\). There are several necessary and sufficient condition for testing if a symmetric matrix A is positive definite:
-
-- \(x^TAx>0\) for all non-zero real vectors x
-- \(\lambda_i >0\) for all eigenvalues \(\lambda_i\) of A
-- all the upper left matrices have positive determinants
-- all the pivots without row exchange satisfy \(d > 0\)
-- there exists invertible matrix B so that A=B^TB
-
-For the last condition, we can use the Cholesky Decomposition to find the matrix B. It decompose a Hermitian positive definite matrix into the product of a lower triangular matrix and its conjugate transpose \(LL^H\):
-
-
let a = Mat.of_array [|4.;12.;-16.;12.;37.;-43.;-16.;-43.;98.|] 3 3;;
->val a : Mat.mat =
->
-> C0 C1 C2
->R0 4 12 -16
->R1 12 37 -43
->R2 -16 -43 98
-
-
-
let l = Linalg.D.chol a;;
->val l : Linalg.D.mat =
-> C0 C1 C2
->R0 2 6 -8
->R1 0 1 5
->R2 0 0 3
-
-
-
Mat.(dot (transpose l) l);;
->- : Mat.mat =
->
-> C0 C1 C2
->R0 4 12 -16
->R1 12 37 -43
->R2 -16 -43 98
-
-
If in \(Ax=b\) we know that \(A\) is hermitian and positive definite, then we can instead solve \(L^Lx=b\). As we have seen previously, solving linear system that expressed with triangular matrices is easy. The Cholesky decomposition is more efficient than the LU decomposition.
-In the Linear Algebra module, we use is_posdef function to do this test. If you look at the code in Owl, it is implemented by checking if the Cholesky decomposition can be performed on the input matrix.
-
-
let is_pos =
- let a = Mat.of_array [|4.;12.;-16.;12.;37.;-43.;-16.;-43.;98.|] 3 3 in
- Linalg.D.is_posdef a;;
->val is_pos : bool = true
-
-
The definition of semi-positive definite is similar, only that it allows the “equals to zero” part. For example, \(x^TAx \leq 0\) for all non-zero real vectors x.
-The pattern \(Ax=\lambda~Mx\) exists in many engineering analysis problems. If \(A\) and \(M\) are positive definite, this pattern is parallel to the \(Ax=\lambda~x\) where \(\lambda > 0\). For example, a linear system \(y'=Ax\) where \(x = [x_1, x_2, \ldots, x_n]\) and \(y' = [\frac{dx_1}{dt}, \frac{dx_2}{dt}, \ldots, \frac{dx_n}{dt}]\). We will see such an example in the Ordinary Differential Equation chapter. In a linearised differential equations the matrix A is the Jacobian matrix. The eigenvalues decides if the system is stable or not. A theorem declares that this system is stable if and only if there exists positive and definite matrix \(V\) so that \(-(VA+A^TV)\) is semi-positive definite.
-
-
-Singular Value Decomposition
-The singular value decomposition (SVD) is among the most important matrix factorizations of the computational era. The SVD provides a numerically stable matrix decomposition that can be used for a variety of purposes and is guaranteed to exist.
-Any m by n matrix can be factorised in the form:
-\[A=U\Sigma~V^T\] {#eq:linear-algebra:svg}
-Here \(U\) is is a \(m\times~m\) matrix. Its columns are the eigenvectors of \(AA^T\). Similarly, \(V\) is a \(n\times~n\) matrix, and the columns of V are eigenvectors of \(A^TA\). The \(r\) (rank of A) singular value on the diagonal of the \(m\times~n\) diagonal matrix \(\Sigma\) are the square roots of the nonzero eigenvalues of both \(AA^T\) and \(A^TA\). It’s close related with eigenvector factorisation of a positive definite matrix. For a positive definite matrix, the SVD factorisation is the same as the \(Q\Lambda~Q^T\).
-The SVD has a profound intuition. A matrix \(A\) represents a linear transformation. SVD states that, any such linear transformation, can be decomposed into three simple transformation: a rotation (\(V\)), a scaling transformation (\(\Sigma\)), and another rotation (\(U\)). These three transformations are much easier to analyse than a random transformation \(A\). After applying \(A\) to a domain, the columns of \(V\) is and a set of orthonormal basis in the original domain, and columns of \(U\) is the new set of orthonormal basis of the domain that is transferred after applying \(A\). The \(\Sigma\) diagonal matrix contains the scaling factors on different dimensions, and a singular value in \(\Sigma\) thus represents the significance of that certain dimension in the linear space. A small singular value indicates that the information contained in a matrix is somehow redundant and can be compressed/removed without affecting the information carried in this matrix. This is why SVD can be used for Principal Component Analysis (PCA), as we will show in the NLP chapter later in this book.
-We can use the svd function to perform this factorisation. Let’s use the positive definite matrix as an example:
-
-
let a = Mat.of_array [|4.;12.;-16.;12.;37.;-43.;-16.;-43.;98.|] 3 3;;
->val a : Mat.mat =
->
-> C0 C1 C2
->R0 4 12 -16
->R1 12 37 -43
->R2 -16 -43 98
-
-
-
let u, s, vt = Linalg.D.svd ~thin:false a;;
->val u : Linalg.D.mat =
->
-> C0 C1 C2
->R0 -0.163007 -0.212727 0.963419
->R1 -0.457324 -0.848952 -0.26483
->R2 0.874233 -0.483764 0.0410998
->
->val s : Linalg.D.mat =
->
-> C0 C1 C2
->R0 123.477 15.504 0.018805
->
->val vt : Linalg.D.mat =
->
-> C0 C1 C2
->R0 -0.163007 -0.457324 0.874233
->R1 -0.212727 -0.848952 -0.483764
->R2 0.963419 -0.26483 0.0410998
-
-
Note that the diagonal matrix s is represented as a vector. We can extend it with
-
-
let s = Mat.diagm s;;
->val s : Mat.mat =
->
-> C0 C1 C2
->R0 123.477 0 0
->R1 0 15.504 0
->R2 0 0 0.018805
-
-
However, it is only possible when we know that the original diagonal matrix is square, otherwise the vector contains the \(min(m, n)\) diagonal elements.
-Also, we can find to the eigenvectors of \(AA^T\) to verify that it equals to the eigenvector factorisation.
-
-
Linalg.D.eig Mat.(dot a (transpose a));;
->- : Linalg.Z.mat * Linalg.Z.mat =
->(
-> C0 C1 C2
->R0 (0.163007, 0i) (0.963419, 0i) (0.212727, 0i)
->R1 (0.457324, 0i) (-0.26483, 0i) (0.848952, 0i)
->R2 (-0.874233, 0i) (0.0410998, 0i) (0.483764, 0i)
->,
->
-> C0 C1 C2
->R0 (15246.6, 0i) (0.000353627, 0i) (240.373, 0i)
->)
-
-
In this example we ues the thin parameter. By default, the svd function performs a reduced SVD, where \(\Sigma\) is a \(m\times~m\) matrix and \(V^T\) is a m by n matrix.
-Besides, svd, we also provide svdvals that only returns the singular values, i.e. the vector of diagonal elements. The function gsvd performs a generalised SVD. gsvd x y -> (u, v, q, d1, d2, r) computes the generalised SVD of a pair of general rectangular matrices x and y. d1 and d2 contain the generalised singular value pairs of x and y. The shape of x is m x n and the shape of y is p x n. Here is an example:
-
-
let x = Mat.uniform 5 5;;
->val x : Mat.mat =
->
-> C0 C1 C2 C3 C4
->R0 0.548998 0.623231 0.95821 0.440292 0.551542
->R1 0.406659 0.631188 0.434482 0.519169 0.0841121
->R2 0.439047 0.459974 0.767078 0.148038 0.445326
->R3 0.307424 0.129056 0.998469 0.163971 0.718515
->R4 0.474817 0.176199 0.316661 0.476701 0.138534
-
-
-
let y = Mat.uniform 2 5;;
->val y : Mat.mat =
->
-> C0 C1 C2 C3 C4
->R0 0.523882 0.150938 0.718397 0.1573 0.00542669
->R1 0.714052 0.874704 0.436799 0.198898 0.406196
-
-
-
let u, v, q, d1, d2, r = Linalg.D.gsvd x y;;
->val u : Linalg.D.mat =
->
-> C0 C1 C2 C3 C4
->R0 -0.385416 -0.294725 -0.398047 0.0383079 -0.777614
->R1 0.18222 -0.404037 -0.754063 -0.206208 0.438653
->R2 -0.380469 0.0913876 -0.199462 0.847599 0.297795
->R3 -0.807427 -0.147819 0.194202 -0.418909 0.336172
->R4 0.146816 -0.848345 0.442095 0.249201 0.0347409
->
->val v : Linalg.D.mat =
->
-> C0 C1
->R0 0.558969 0.829189
->R1 0.829189 -0.558969
->
->val q : Linalg.D.mat =
->
-> C0 C1 C2 C3 C4
->R0 -0.436432 -0.169817 0.642272 -0.603428 0.0636394
->R1 -0.124923 0.407939 -0.376937 -0.494889 -0.656494
->R2 0.400859 0.207482 -0.268507 -0.567199 0.634391
->R3 -0.283012 -0.758558 -0.559553 -0.173745 0.0347457
->R4 0.743733 -0.431612 0.245375 -0.197629 -0.40163
->
->val d1 : Linalg.D.mat =
->
-> C0 C1 C2 C3 C4
->R0 1 0 0 0 0
->R1 0 1 0 0 0
->R2 0 0 1 0 0
->R3 0 0 0 0.319964 0
->R4 0 0 0 0 0.0583879
->
->val d2 : Linalg.D.mat =
->
-> C0 C1 C2 C3 C4
->R0 0 0 0 0.94743 0
->R1 0 0 0 0 0.998294
->
->val r : Linalg.D.mat =
->
-> C0 C1 C2 C3 C4
->R0 -0.91393 0.196148 0.0738038 1.45659 -0.268024
->R1 0 0.463548 0.286501 1.38499 -0.0595374
->R2 0 0 0.346057 0.954629 0.167467
->R3 0 0 0 -1.56104 -0.124984
->R4 0 0 0 0 0.555067
-
-
-
Mat.(u *@ d1 *@ r *@ transpose q =~ x);;
->- : bool = true
-Mat.(v *@ d2 *@ r *@ transpose q =~ y);;
->- : bool = true
-
-
The SVD is not only important linear algebra concept, but also has a wide and growing applications. For example, the Moore-Penrose pseudo-inverse that works for non-invertible matrix can be implemented efficiently using SVD (we provide pinv function in the linear algebra module for the pseudo inverse). It can also be used for information compression such as in image processing. As we have said, in the Natural Language Processing chapter we will see how SVD plays a crucial role in the language processing field to perform principal component analysis.
-
-
-
-Internal: CBLAS and LAPACKE
-This section is for those of you who are eager for more low level information. The BLAS (Basic Linear Algebara Subprogramms) is a specification that describes a set of low-level routines for common linear algebra operation. The LAPACKE contains more linear algebra routines, such as solving linear systems and matrix factorisations, etc. Efficient implementation of these function has been practices for a long time in many softwares. Interfacing to them can provide easy access to high performance routines.
-
-Low-level Interface to CBLAS & LAPACKE
-Owl has implemented the full interface to CBLAS and LAPACKE. Comparing to Julia which chooses to interface to BLAS/LAPACK, you might notice the extra C in CBLAS and E in LAPACKE because they are the corresponding C-interface of Fortran implementations. It is often believed that C-interface may introduce some extra overhead. However, it turns out that we cannot really notice any difference at all in practice when dealing with medium or large problems.
-
-The functions in Owl_cblas and Owl_lapacke_generated are very low-level, e.g., you need to deal with calculating parameters, allocating workspace, post-processing results, and many other tedious details. You do not really want to use them directly unless you have enough background in numerical analysis and chase after the performance. So for example, the LU factorisation is performed using the sgetrf or dgetrf function in the Owl_lapacke_generated module, the signature of which look like this:
-
-
val sgetrf: layout:int -> m:int -> n:int -> a:float ptr -> lda:int -> ipiv:int32 ptr -> int
-
Instead of worrying about all these parameters, the getrf function in the Owl_lapacke module provides interface that are more straightforward:
-
-
val getrf : a:('a, 'b) t -> ('a, 'b) t * (int32, int32_elt) t
-
These low-level functions provides more general access for users. If this still looks a bit unfamiliar to your, in the Linalg module we have:
-
-
val lu : ('a, 'b) t -> ('a, 'b) t * ('a, 'b) t * (int32, int32_elt) t
-
Here the function lu x -> (l, u, ipiv) calculates LU decomposition of input matrix x, and returns the L, U matrix together with the pivoting index. In practice, you should always use Linalg module which gives you a high-level wrapper for frequently used functions.
-Besides these function, the linear algebra module also provides some helper functions. For example, the peakflops ~n () function returns the peak number of float point operations using Owl_cblas_basic.dgemm function. The default matrix size is 2000 x 2000, but the user can change this by setting n arguments.
-
-
-
-Sparse Matrices
-What we have mentioned so far are dense matrix. But when the elements are sparsely distributed in the matrix, such as the identity matrix, the sparse structure might be more efficient.
-The most intuitive way to represent a sparse matrix is to use the (row, column, value) triplet. The tuples can be pre-sorted according to row and column values so enhance random access time. Another commonly used format is the Compressed Sparse Row (CSR) format. It is similar to the triplet format with row indices compressed. Here is an example. Suppose that we need to represent the matrix below in CSR:
-\(\left[\begin{matrix} 10 & 0 & 9 & 8 \\ 0 & 7 & 0 & 0 \\ 6 & 5 & 0 & 0 \end{matrix} \right]\)
-The column indicies and values are still the same, but now the length of row indicies is the same as that of the row number. Each element shows the index of the first value in that row in the whole value vector, as shown in [@tbl:linear-algebra:csr].
-
-CSR format illustration {#tbl:linear-algebra:csr}
-
-
-
-
-
-| Column |
-0 |
-2, 3, 1 |
-0, 1 |
-
-
-| Value |
-10 |
-9, 8, 7 |
-6, 5 |
-
-
-
-The benefit of CSR is that it is more efficient at accessing row-vectors or row operations. Another data structure Compressed Sparse Column (CSC) is similar, except that it compresses column vector instead of row.
-The sparse matrix is proivded in the Sparse.Matrix module, and also support the four types of number in the S, D, C, and Z submodules. Currently we interfaces to the Eigen library to use its sparse matrix representation.
-
-
-Summary
-This chapter gives an overview of the topic of Linear Algebra. Starting from the basic vector and matrix, we briefly introduce several key ideas in this field, including Guassian elimination, vector spaces, determinatns, Eigenvalues, Positive Definite Matrices, etc. We explain these topics with example and code using Owl. Sure enough, there is no way to cover all these topics in one chapter. We refer to classic textbooks for more inforation. In the end, we introduce how the linear algebra module is implemented in a numerical library such as Owl. We close the discussion with a brief explanation of the sparse matrix and the representation formats used.
-
-
-
- Next: Chapter 09Ordinary Differential Equations
{kind=link}
{kind=link}
{kind=link}
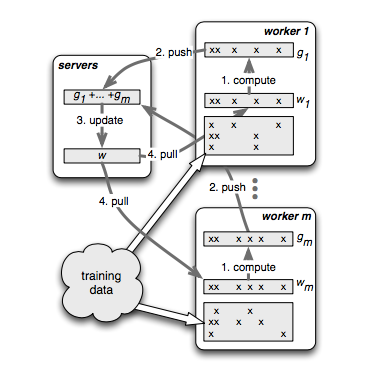{kind=link}