我们推荐使用 CLion IDE 作为电控和视觉的开发IDE,安装方式见官方教程 安装CLion。
参考 ROS setup tutorial 此外,为了兼容 catkin build 和 catkin_make 应作如下设置
- 打开 File | Settings | Build, Execution, Deployment | CMake
- 将 CMake options 的值更改为
-DCATKIN_DEVEL_PREFIX=../devel - 将 Build directory 的值更改为
../build
打开 File | Settings | Editor | Code Style,在 ClangFormat 勾选 Enable ClangFormat(only for C/C++/Objective-C)
- 打开 File | Settings | Plugins,在 Marketplace 中搜索并安装 Save Actions
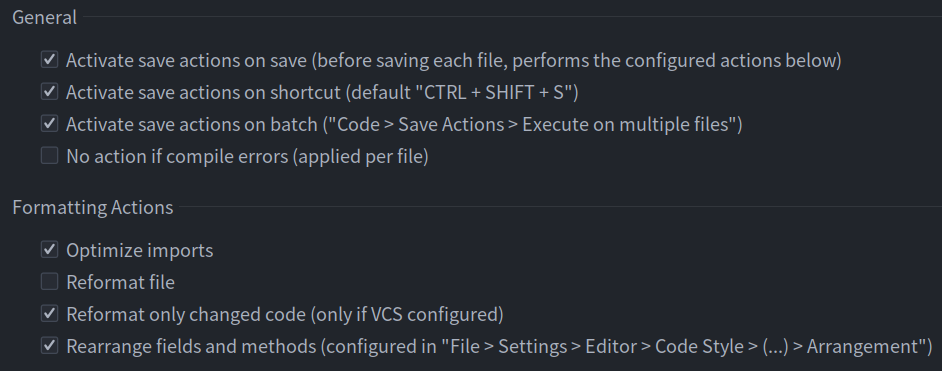
- 重启IDE,转到 File | Setttings | Save Actions,勾选以下选项:
在调试时机器人时,有时为了快速修改参数和测试,不会通过CI进行构建和发布再安装到机器人上。我们会通过scp或CLion提供的代码同步,将需要调试的单个包传到机器人上的工作空间,在机器人上面编译和运行。
在使用本地IDE在远程机器人上编译、运行开发和调试较为不常用,一般可参考Full remote mode。