CRANE+ V2 のGazebo シミュレーションパッケージです。
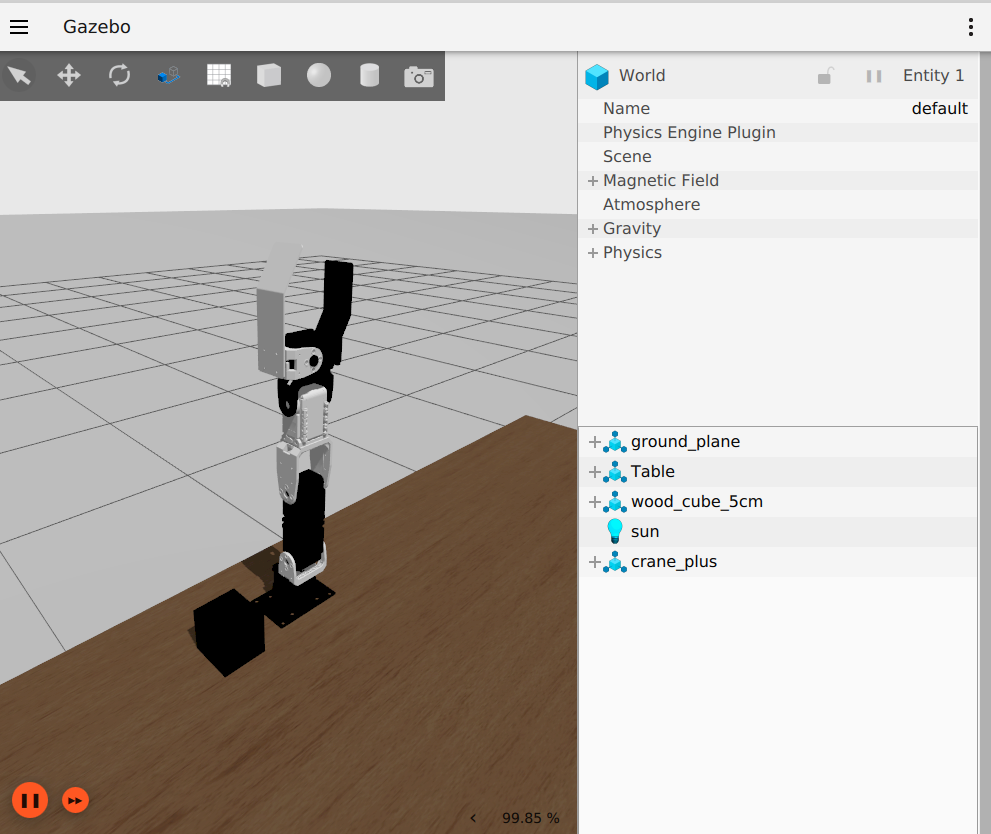
次のコマンドを実行するとGazeboが起動し、CRANE+ V2モデルとTable、Boxが表示されます。
初回起動時はTableとBoxのモデルをダウンロードするため、モデルの表示に時間がかかることがあります。
実機との接続やcrane_plus_examples/launch/demo.launch.pyの実行は必要ありません。
$ ros2 launch crane_plus_gazebo crane_plus_with_table.launch.pyカメラ付きモデルを使用する場合は下記コマンドを実行します。
$ ros2 launch crane_plus_gazebo crane_plus_with_table.launch.py use_camera:=trueCRANE+ V2の前にArUcoマーカ付きのBoxを置いたシミュレータ環境を使用する場合は下記コマンドを実行します。
$ ros2 launch crane_plus_gazebo crane_plus_with_aruco_cube.launch.pyCRANE+ V2の前に赤いBoxを置いたシミュレータ環境を使用する場合は下記コマンドを実行します。
$ ros2 launch crane_plus_gazebo crane_plus_with_red_cube.launch.py