Replies: 3 comments 25 replies
-
|
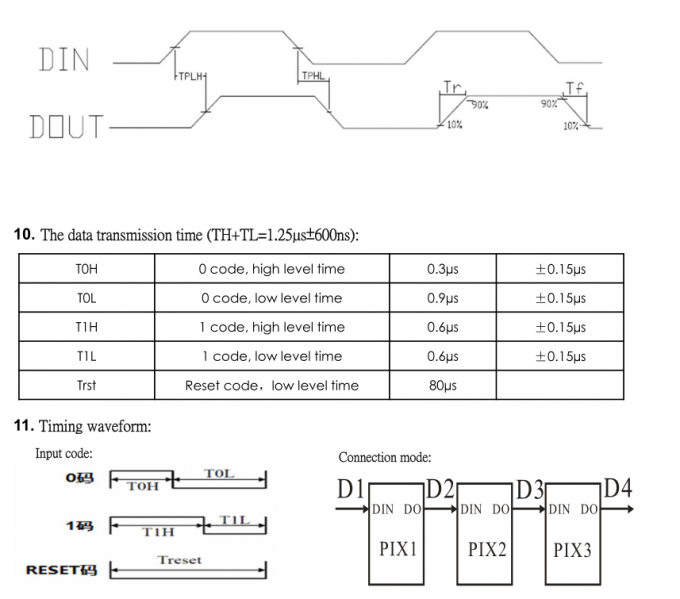
I think it's unrealistic for one ESP32 to control 800 pixels at 120Hz. Too much data per second. It's about 384kbytes/s. Driving the pixels with the UART blows up the memory use by about 3x, so this would require about 10Mbits/s on the serial port, but it is running at only 2.5megabaud. Put another way the bits on the WS2812B protocol take up 1.25µs so you can send max 800kbits/s. At 32 bits per pixel that's 25000 pixels/s maximum. So at 120Hz you are limited to a chain of max 208 pixels. In practice probably only 100 is realistic. |
Beta Was this translation helpful? Give feedback.
-
|
I think for the step() calculations you can do quite a lot with lookup tables (assuming div and mod are too slow), but I don't quite understand the requirements. It's unclear how the frame rate from the gif interacts with the final frame rate in the real world, and how the step function is used to combine the two. ESP32s are quite cheap and it might be easiest to have more of them to drive the LED strips. Probably you need an actual wire between them to get them 100% synchronized with each other. At least I don't know whether data received over wifi can be time stamped accurately enough. |
Beta Was this translation helpful? Give feedback.
-
Note: I think there are some pixel-strips that have a higher datarate. In that case 120Hz might be possible. I doubt you would notice it on non-moving objects, though. |
{kind=link}
Beta Was this translation helpful? Give feedback.
-
I apologize, the example I used isn't helping. I just wanted to give context to the kind of work/projects where I'd like to use Toit for. As for where the The combination of RMT + PulseCounter is attractive because it enables the modulation of RMT pulses dynamically acting as a carrier wave of sorts on which the PulseCounter could piggy-back on. |
Beta Was this translation helpful? Give feedback.
-
|
Here's how the auto step(timepoint t_start, duration interval, int value)
{
const auto since = now() - t_start;
const auto capped = since % interval;
return (capped * value) / t_start;
}And here's an example effect that uses the auto bar_shift_right()
{
const auto n = num_leds / 2 + 1; // length of the bar
const auto s = step(t_start, interval, num_leds + n);
for (int i = 0; i < num_leds; i++)
{
leds[i] = (i < s && i > (s -n)) ? max_value : 0;
}
} |
Beta Was this translation helpful? Give feedback.
-
This shouldn't take long to compute in Toit. Primitive calls are relatively fast, but they are still taking a bit of time, so using the hardware instead of a few instructions of Toit is generally not worth it. |
Beta Was this translation helpful? Give feedback.
-
|
Nice project. One of my projects is to add ~50m of LED strips to my apartment, so I'm hopeful your project works (and if not that we can fix it). -- As Erik said, that's a lot of data. Streaming pixel values 120 times a second would be a lot of data. I guess you would only stream individual pixel values more rarely, and then adjust them (for example with the I looked into using the RMT and Pulse-counter together. In theory it should be possible to do this on a single pin, but I wasn't able to do it from Toit. As soon as I reuse the same pin in the pulse-counter and the RMT the other doesn't see the values anymore. (My guess is that the setup functions change the pin's direction to exclusive input/output). I then connected two pins (32 and 33) and emitted the RMT output on one and counted on the other, and that worked (as expected). I'm not sure it's a real win, though: the timing would, obviously, be extremely precise and there would be no software interaction, but the division/modulo operations shouldn't be that costly either. Compared to a primitive-invocation (crossing the Toit/C boundary) a division/modulo should still be cheaper. As such, you wouldn't win that much. That said, it might actually be faster. After all you would switch one primitive call (the one to the monotonic_us) with another (the one to get the pulse-counter's value), but would avoid the division/modulo. I'm not sure it's worth it. For controlling step motors, we probably want to use the actual MCPWM peripheral (https://docs.espressif.com/projects/esp-idf/en/latest/esp32/api-reference/peripherals/mcpwm.html). I haven't looked at it yet, but I would expect that it has all the features that would be needed. |
Beta Was this translation helpful? Give feedback.
-
OK, yes, that makes sense. It'd definitely be useful to have functionality that's specific to an organization's needs. I'd signup for that even if that was a paid service similar to the cloud platform that you have. |
Beta Was this translation helpful? Give feedback.
-
Sorry, I imagine the two of us have the same picture in mind. Where each step is a value that I could use to scale the brightness of a pixel (for instance). So, you could imagine, you want to take a pixel and scale it's brightness over a certain duration (x-axis) and every increment by the counter would be used in the computation of that pixel's brightness at that time instant. You could also imagine building on top of this behavior to compose more complex effects at a per-pixel or set-of-pixels basis. |
{kind=link}
Beta Was this translation helpful? Give feedback.
-
I think we agree, but I don't understand the value of it. During one refresh cycle you are going to update 800 LEDs. That, by itself, takes ~30ms. The esp32 has 4? pulse counters, so you could get 4 step values from the hardware. Since the 800 LEDs latch their new values at the same time, you can thus use 4 hardware values (the ones you read at the beginning when updating the LEDs) from it. Instead of using hardware, you can just use a call to |
Beta Was this translation helpful? Give feedback.
-
I believe the effect of having limited no. of counters is that I won't be able to use more than that many effects, assuming that each effect would use a separate counter, so therefore quite limiting compared to a software-based counter? Do I understand correctly? If I'm using the |
Beta Was this translation helpful? Give feedback.
-
The current way that the I can see that the |
Beta Was this translation helpful? Give feedback.
-
Hello Toit-ers,
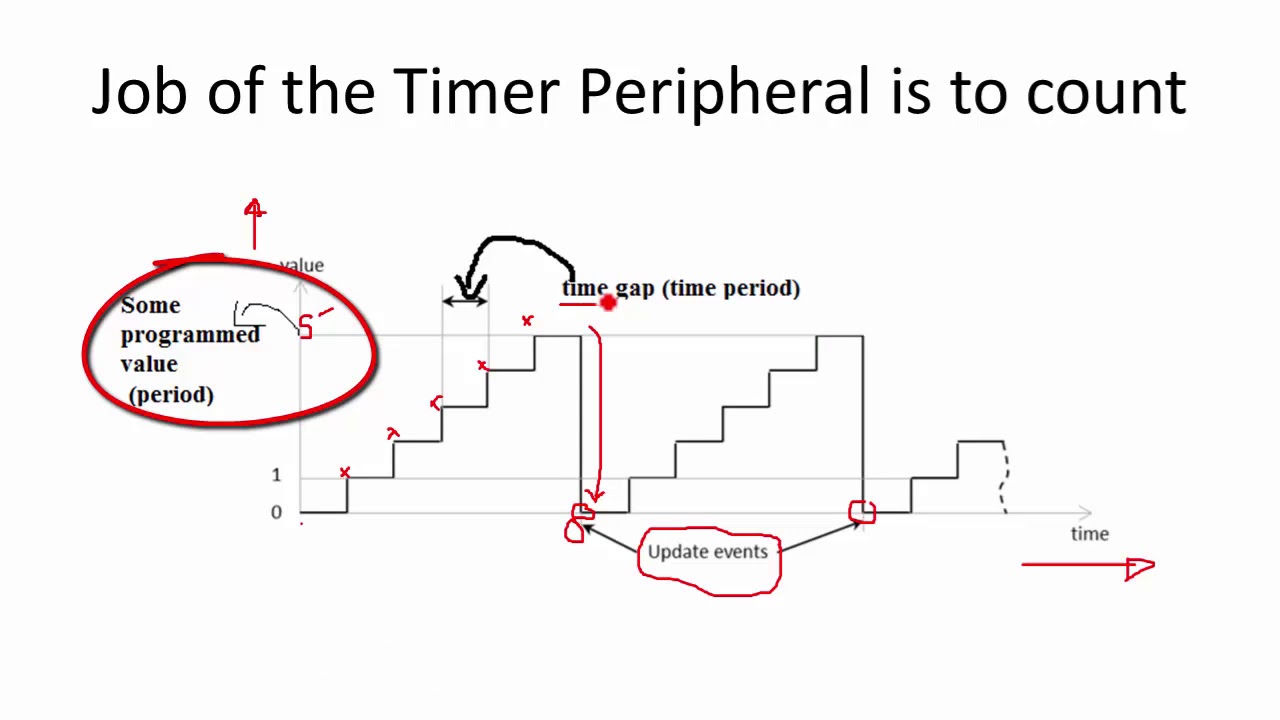
I run a small studio that works on interactive sculptures and R&D services. I came across Toit recently and been pondering using it for a project which involves using several (8x) ESP32s on a wireless network, each controlling a RGBW strip (>800) leds. A Raspberry Pi acts as a server streaming out pixel values (extract scan lines from a GIF) for each strip 120 times a second. Effectively, the strips act like pixel lines on a screen and refresh at 120fps. Part of the project involves composing LED effects which happens to be ergonomic when working with HSV (I can make a separate feature-request issue about the
pixel_strippackage elsewhere) before dumping to the strip as RGB (by conversion). To aid with the composition, we currently use a primitive calledstep(time_interval, target_value)which generates values between[0,target_value]with an increment computed from thetime_interval. For example, we would usestep(1000, 2)to generate a square wave with a period of one second. Currently, this is done in software and involves expensive%and/operations. If you were to usestep(1000, 255)this would generate a saw-tooth wave. When I looked at the plot of the values produced reminded me of how a timer's counter works. Usually, one is able to read the timer's counter values during its operation on an interrupt and do something with the count. In my case, I could use the count to scale, say, the brightness of an LED pixel or shift it's hue value by that amount to another pixel etc.I figured that the RMT and Pulse Counter peripherals could be used together to achieve this at hardware efficiency without any software arithmetic. I suppose at the high-level this is what I have in mind -
I could imagine this being useful for controlling stepper motors using the
STEP/DIRinterface but also applying acceleration profiles (fixed at compile-time or computed at run-time) potentially in an isolated task or process with CRITICAL priority. I suppose the question is how, if, this could be achieved with what's already available in the language and standard library? If it can't then any suggestions would be helpful. If things like the one I mentioned about the stepper motor could be done, I'm considering switching shop from C++ to Toit entirely. We already made the switch from Teensy to ESP32 a while ago, although something likeTeensyAudioremains a welcome addition to the Toit ecosystem, a discussion for another day.Thanks,
CA
Beta Was this translation helpful? Give feedback.
All reactions