Using the Bosch XDK Orientation-Sensor, a PC software and OpenTrack to stream head tracking data from the sensor board to the final application.
| Branch | Client Status | Embedded Status |
|---|---|---|
| master |  |
|
| current | <no-job> |
To use this project you'll need:
- An XDK Cross Domain Development Kit
- A OpenTrack installation (or the portable version) running in UDP-receive mode
To build this project you'll need:
- The XDK-Workbench to build the embedded firmware
- Visual Studio to build the client software
- Start by downloading the repository files and building them.
- For the embedded software you'll need the XDK-Workbench. Import the project files into the Workbench and run the debug or release build target. Afterwards you can flash the firmware onto your XDK hardware via the "Flash" button in the XDK Device - View.
- For the client software simply install the Visual Studio version of your liking and open the Solution-file. Run the Debug or Release build targets and execute the software.
- Power on the XDK and let it boot for a second. The red LED should light up constantly when ready. To get the best results it's recommended to calibrate the orientation sensor algorithm by first letting the device sit still on a flat surface for a few seconds (calibrating the gyroscope) and then perform a figure of eight (calibrating the magnetometer).
- If not already done, connect the XDK via USB to your host-PC and mount the device on your head (using a headset and some Velcro™ tape should work).
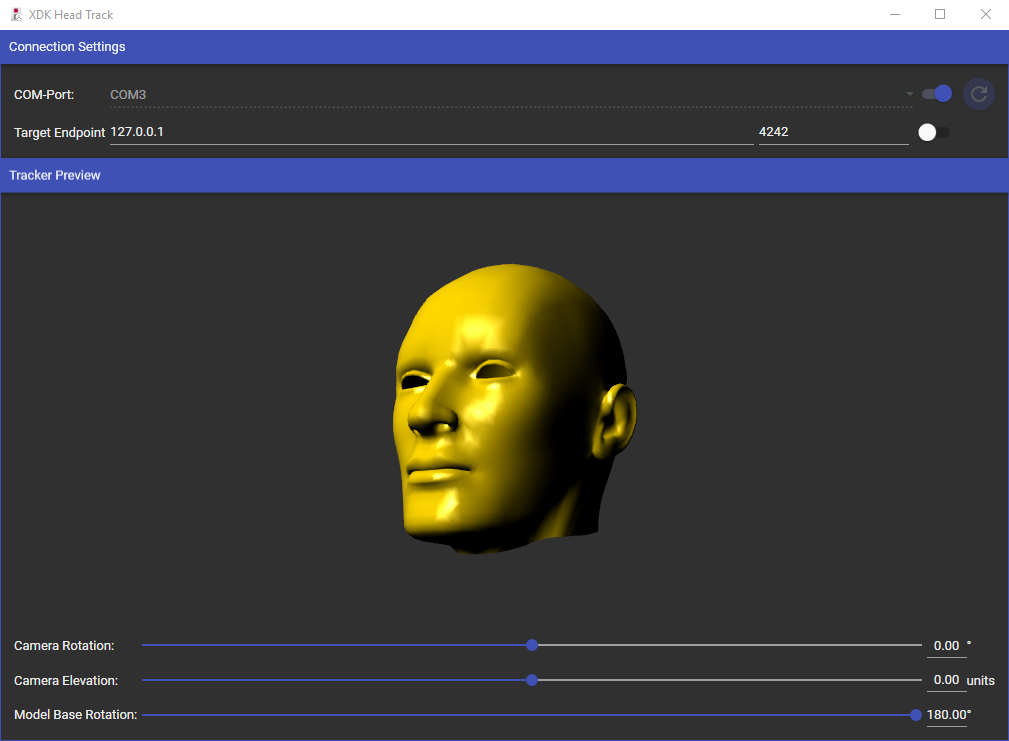
- Start-up the PC client software, identify your XDK in the COM-port list and hit the connect-switch. You may check out the Windows Device Manager to find the exact COM-port your XDK is available under. After connecting the serial-port the software should start receiving orientation data and the 3D head model should start moving respective to the XDKs' orientation.
- Start your OpenTrack software, select "UDP over network" as input and hit the start tracking button.
- In the PC software enter the IP of the host OpenTrack is running on (usually localhost/127.0.0.1) and hit the connect-switch. You should now see the OpenTrack preview react to the XDKs' movement.
- Use BUTTON1 on the XDK to calibrate the sensor initially (so that the axis are correct). Afterwards and sometimes during use it may be necessary to compensate the sensor drift by re-calibrate, however this small drift can be compensated by using the OpenTrack center feature (bind the key in OpenTrack first).