The following is adapted from http://sdk.rethinkrobotics.com/intera/Workstation_Setup and https://wiki.ros.org/kinetic/Installation/Ubuntu. It runs exclusively on Ubuntu 16.04. If you run this on newer versions of Ubuntu, you will have to update install.sh for the latest ROS distro.
If you change the directory, make sure you adjust all following commands.
$ cd
$ sudo apt -y install git
$ git clone https://github.com/Darbeloff/TeachBot.git
Run the following commands in terminal:
$ cd ~/TeachBot
$ ./install.sh
Alternatively, if you do not run install.sh because you already installed the dependencies previously, and now you just want to prepare a freshly cloned version of this repository to work, run the following commands in terminal:
$ cd ~/TeachBot
$ ./setup.sh
That setup script only merges the Intera resources and installs NPM directories.
Connect to the robot via the ethernet port on the outside of the Controller.

Open Ubuntu's "Settings" tool, and navigate to the "Network" tab. Then, click the gear icon in the "Wired" section.

Navigate to the IPv4 tab and select "Link-Local Only." Then, click "Apply."

You will not be able to use that ethernet port to access the internet until you revert the Method to "Automatic (DHCP)." You may now close the Settings window.
$ cd ~/TeachBot/robot
$ ./intera.sh
You should now be in a new shell titled intera - http://tom.local:11311 where tom is the name of your robot. A useful command for viewing and validating your ROS environment setup is:
$ env | grep ROS
The important fields at this point:
ROS_MASTER_URI - This should now contain your robot's hostname.
ROS_HOSTNAME - This should contain your PC's hostname.
Try to get rostopic list from robot by typing following command:
$ rostopic list
You should see a the rostopic list from the command line output similar as following:
/array_topic
/audio_duration
/calibration_command/cancel
/calibration_command/feedback
/calibration_command/goal
/calibration_command/result
/calibration_command/status
/camera_field_calibration/cancel
/camera_field_calibration/feedback
/camera_field_calibration/goal
/camera_field_calibration/result
/camera_field_calibration/status
/cmd2browser
/cmd2shell
/collision/right/collision_detection
/collision/right/debug
/dev_topic
/diagnostics
/engine/task_state
/errors
/head_navigator_button
/intera/endpoint_ids
/io/comms/command
/io/comms/config
/io/comms/io/command
/io/comms/io/config
/io/comms/io/state
/io/comms/state
/io/end_effector/command
/io/end_effector/config
/io/end_effector/state
/io/internal_camera/command
...
Navigate to the TeachBot/robot directory.
$ cd ~/TeachBot/robot
Initialize SDK environment
$ ./intera.sh
Launch the websocket and start Node.js
$ roslaunch ../browser/websocket.launch & node ../browser/www.js &
Run the TeachBot ROS Node
$ rosrun sawyer teachbot.py
Run the Button Box ROS Node
$ rosrun button_box button.py
Open Firefox and go to the url https://localhost:8000
Click "Advanced"

Click "Add Exception"
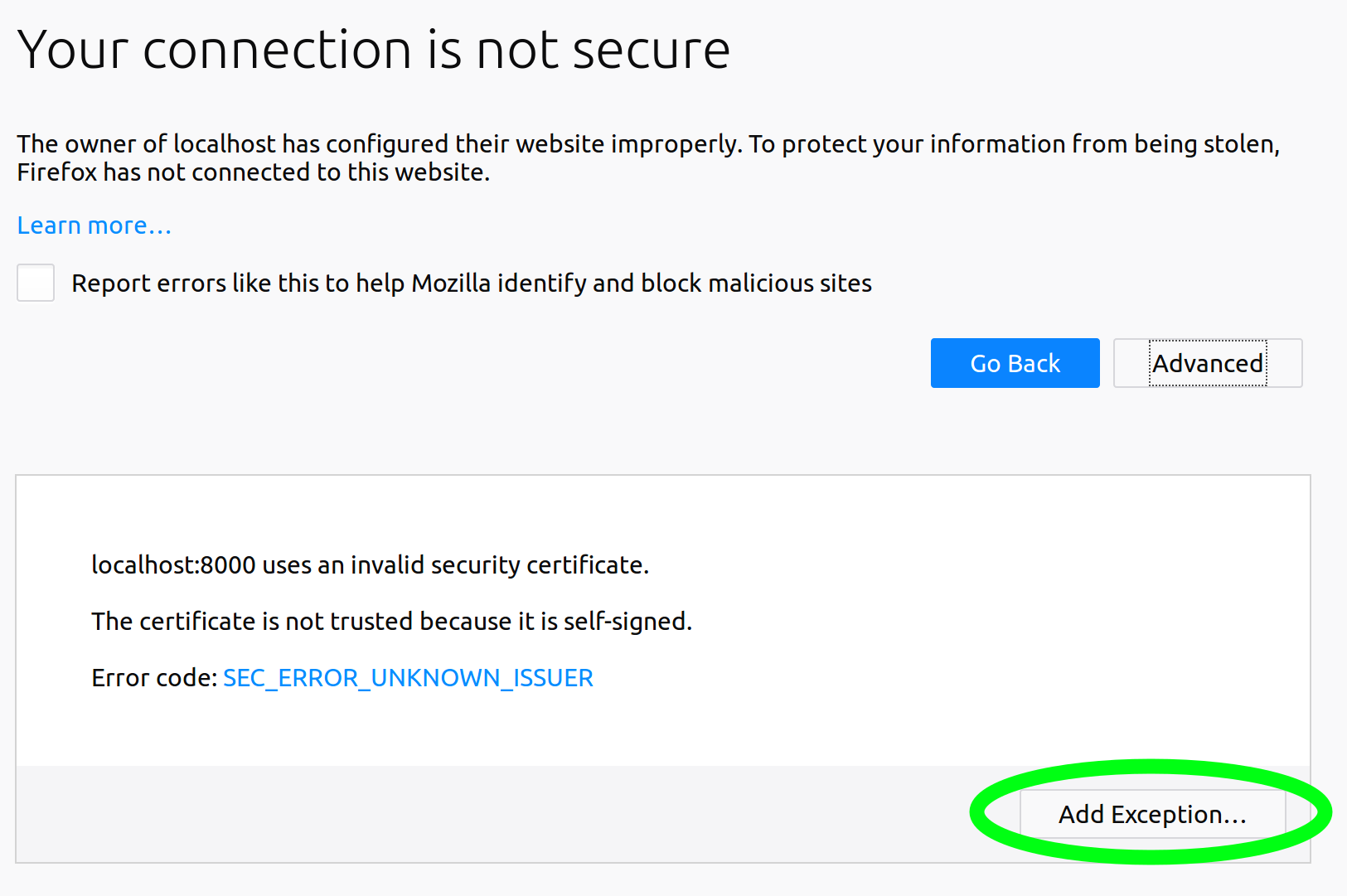
Click "Confirm Security Exception"

At this point, the module should begin, but there should be a pop-up window that reads "Error connecting to websocket server" like this:

Then, go to the url https://localhost:9090 and repeat the security exception process. After, https://localhost:9090 should simply read Can "Upgrade" only to "WebSocket". Navigate back to https://localhost:8000.
You have successfully launched the teaching module!
.
|
+-- browser Files related to the HTML/CSS/JS running in-browser.
| +-- public Front-End Browser Content.
| +-- audio TeachBot speech audio files.
| +-- module# Directories containing subdirectories of audio files, indexed by module.
| +-- <section_name>/ Directories containing audio files indexed by line number.
| +-- make_speech.py Script to generate speech audio files from text scripts.
| +-- css/ Style sheets for the browser HTML
| +-- html/ Web pages to display in browser.
| +-- images/ Images displayed in browser by TeachBot.
| +-- js JavaScript module control scripts and utilities.
| +-- json/ JavaScript Object Notation (JSON) files containing the instructions for each module.
| +-- utils/ Utility functions for browser.
| +-- Module.js Module object class definition.
| +-- #.js Module control scripts for browser indexed by module.
| +-- text The text of what TeachBot says.
| +-- module# Directories containing .txt files of what TeachBot says, indexed by module.
| +-- <section_name>.txt Text file containing all lines spoken by TeachBot in a given section.
| +-- videos/ Videos played in browser by TeachBot.
| +-- routes/ Node.js routes used by app.js.
| +-- views/ App templates.
| +-- app.js Main configuration file for TeachBot browser.
| +-- CMakeLists.txt Node CMakeLists.
| +-- package-lock.json NPM install utility.
| +-- package.json NPM install utility.
| +-- package.xml Node package manifest.
| +-- websocket.launch ROS launch file for web module.
| +-- www.js Starts Node.js server.
|
+-- images/ Images for the README.
|
+-- robot Python ROS library responsible for communicating with the robot.
| +-- src Source code.
| +-- sawyer TeachBot ROS package for the RethinkRobotics Sawyer.
| +-- Learner_Responses/ Data collected from user subject tests.
| +-- msg/ Custom message files for information transfer to and from the browser.
| +-- src/ Python source code.
| +-- teachbot.py ROS listener controlling the robot and receiving commands from the browser.
| +-- <other>.py Utility classes and functions used by module control scripts.
| +-- CMakeLists.txt ROS package CMakeLists.
| +-- package.xml ROS package manifest.
| +-- setup.py ROS package setup script.
| +-- sslcert/ SSL certificate files required for setting up HTTPS connection.
| +-- logo.png TeachBot logo to be displayed on Sawyer head display.
| +-- safety1.mp3 Audio file to be played when TeachBot limb exits safety zone.
| +-- safety2.mp3 Audio file to be played when TeachBot limb resets to within the safety zone.
|
+-- edit_intera.py Used by install.sh. Copies and edits intera.sh into TeachBot/robot.
+-- install.sh Installation script.
+-- LICENSE BSD 3-Clause software license.
+-- README.md This document.
+-- setup.sh Used by install.sh. Merges Intera resources and installs NPM dependencies.
The project is organized in two segments:
- JavaScript Node application, responsible for coordinating the module and displaying content in the browser, and
- Python ROS library, responsible for communicating with the robot.
The JavaScript scripts controlling the browser are located here and are indexed by module (e.g. 1.js, 2.js, and so on). The layout is simple:
- Construct Module object.
- Initialize main() function, which starts the Module.
This should be the last script included in the HTML.
The crux of these files is Module.js, the constructor of the Module object. Upon construction, a Module sets up ROS communication with the robot, prepares the browser for a Module, and loads all of the resources needed to run the module including the text, audio, and JSON files. Once everything is loaded, it runs the main() function provided by the calling script. The main() function should always conclude with a call to Module.start(), which begins recursively iterating through the instructions in the JSON file.
The server running the browser half of the application can be started using the command described above:
$ roslaunch ../browser/websocket.launch & node ../browser/www.js &
All Python ROS packages are located in the robot source directory.
With the exception of arduino_files and the files imported from other repositories, each package is named after the robot it commands (e.g. sawyer should be used when connected to the RethinkRobotics Sawyer cobot). In the source directory of each package, there should be a teachbot.py script that runs the central listener, receiving instructions from the JavaScript Module over ROS, forwarding those commands to the robot over Ethernet, and communicating data from the robot back to the JavaScript Module.
The main teachbot.py scripts are run using the command described above:
$ # This is just the format of the command. Do not actually enter <name_of_cobot>.
$ rosrun <name_of_cobot> teachbot.py
This repository is affiliated with a journal article you can read for free at https://www.sciencedirect.com/science/article/pii/S2405844021016868. Please use the following text to cite this repository:
Nicholas Stearns Selby, Jerry Ng, Glenda S. Stump, George Westerman, Claire Traweek, and H. Harry Asada, "TeachBot: Towards Teaching Robotics Fundamentals for Human-Robot Collaboration at Work," in Heliyon, vol. 7, no. 7, pp. e07583, 2021, doi: 10.1016/j.heliyon.2021.e07583.
The BibTeX is:
@article{TeachBot,
title = {TeachBot: Towards teaching robotics fundamentals for human-robot collaboration at work},
journal = {Heliyon},
volume = {7},
number = {7},
pages = {e07583},
year = {2021},
issn = {2405-8440},
doi = {https://doi.org/10.1016/j.heliyon.2021.e07583},
url = {https://www.sciencedirect.com/science/article/pii/S2405844021016868},
author = {Nicholas Stearns Selby and Jerry Ng and Glenda S. Stump and George Westerman and Claire Traweek and H. Harry Asada},
keywords = {Adult learning, Human-computer interface, Human-robot interaction},
abstract = {The shortage of skilled workers who can use robots is a crucial issue hampering the growth of manufacturing industries. We present a new type of workforce training system, TeachBot, in which a robotic instructor delivers a series of interactive lectures using graphics and physical demonstration of its arm movements. Furthermore, the TeachBot allows learners to physically interact with the robot. This new human-computer interface, integrating oral and graphical instructions with motion demonstration and physical touch, enables to create engaging training materials. Effective learning takes place when the learner simultaneously interacts with an embodiment of new knowledge. We apply this “Learning by Touching” methodology to teach basic concepts, e.g. how a shaft encoder and feedback control work. In a pilot randomized control test with a small number of human subjects, we find suggestive evidence that Learning by Touching enhances learning effectiveness in this robotic context for adult learners. Students whose learning experience included touching the robot as opposed to watching it delivers the lessons showed gains in their ability to integrate knowledge about robotics. The “touching” group showed statistically significant gains in self-efficacy, which is an important antecedent to further learning and successful use of new technologies, as well as gains in knowledge about robotic concepts that trend toward significance.}
}