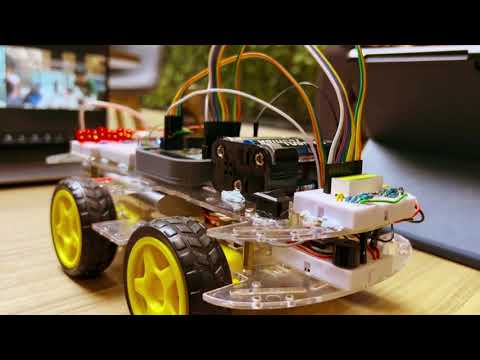
This project's goal is to design a remote-controlled car to navigate an obstacle course in the fastest time possible while performing certain tasks like making lights flash in a pattern and playing music. The car is built using an ESP32 microcontroller and KL25Z board, which runs on an open source Real-Time Operating System (RTOS) known as RTX, and uses ARM architecture.
Project Specifications contains details about what the project is supposed to achieve.
ESP32_Bluepad_Controller contains a .ino file for the ESP32 to connect to a generic controller over bluetooth and subsequently communicate to the KL25Z over UART.
Integration contains the final code for our run shown in the video.
Archive contains the minimally viable code for the KL25Z, compiled with Keil uVision software. The final version of the code is in Integration. The archive also contains the template code and previous labs' work.