USB adapter to Arduino with Dynamixel Shield or Stepper Shield / Driver provides simple digital IO and motion.
It is a simple Arduino script to set pins high, low, input, pull up, or analog/servo, clock out data with timing, and read all or a single pin back via serial IO. It also (optionally) supports Dynamixel Servos given a sheild and Stepper Motors given a standard step / direction driver. It's been tested with the XC-430, and XL-320 servos.
Generally useful to turn the Arduino into a tool for generating test signals, and reading back results.
- Not as powerful as the busPirate or LabNation SmartScope, but more flexible in some ways and much easier to operate. And it optionally runs a Servo or Stepper in useful ways (e.g. with acceleration and max velocity) if you enable that and install those libraries.
- Not a replacement for Firmata as this is intended to be used by a human directly via serial monitor or terminal, in addition to being useful from a Pi or other high level robot controller. And it does not provide high level drivers for a fixed set of devices. It is more useful as means of developing drivers.
This is a "kitbash" of this gist: https://gist.github.com/JamesNewton/8b994528ff3ce69e60bbb67c40954cd2 with some firmware changes to support the Dynamixel servo via the hardware in this repo: https://github.com/JamesNewton/Dynamixel-Shield-Setup
Note: If SERVO_SUPPORT is enabled and the Dynamixel Shield is installed, then it does NOT communicate via the Arduino USB adapter during normal operation, it uses an external USB / TTL serial adapter instead because the Dynamixel is on the main Arduino serial port. If you don't need the servos, it will (probably) work with just the standard Arduino serial interface.
All commands are in the format [#,][#]L where [#,] is an optional saved number, [#] is a primary number, and L is an opcode.
| Op | Description |
|---|---|
#? |
Return binary value of digital pin, and value for analog input if supported by the pin. If # and default # (set by comma command, see below) are zero or ommitted, ? returns all pins and analog values at once. e.g. 1? might return {"1":[1,459]} indicating the pin is digital high, and analog 459 counts. Because pin 2 is used by the servo system, 2? returns servo data. Specify the servo id with #, e.g. 3,2? returns position, torque, and velocity for servo ID 3. |
#I |
Set pin # to an input. e.g. 3I |
#P |
Set pin # to an input with internal pullup. e.g. 4P |
#H |
Set pin # to a high output. e.g. 3H4H |
#L |
Set pin # to a low output. e.g. 5L4L3L |
#D |
Delay # microseconds between each command, with a minimum of about 47uS |
#, |
Comma. Saves pin # as the default pin for all commands e.g. 3,HLHLHL |
#,#A |
Set pin # to an analog output with value. Only PWM outputs (labeled "~") will respond. Use with comma command e.g. 5,120A will put 120 on pin 5 |
_- |
"low high clocked" Puts out a set of low and high signals on # with a clock on #, e.g. 5,11-__-_--_ clocks out 10010110 on pin 11, with clock pulses on pin 5. Clock is currently falling edge only. 5,11- is basically 5L11H5H5L11L |
. |
"in clock" Reads data back from # while clocking #, e.g. 5L 11H 5,11-__-_--_. ......... clocks out 10010110, gets the ack, and then 8 bits of data and a final ack. |
( |
I2C start with # as SDA and #, as SCL |
) |
I2C stop with # as SDA and #, as SCL. Pins left floating pulled up. e.g. 5,11(-__-_--_. .........) starts, 10010110, gets ack, data, ack, stop |
| If SERVO_SUPPORT is enabled and the Dynamixel Shield is installed: | |
#,#R |
Reboot / Initialize servo into mode. <id>,<mode>R. e.g. 1,4R starts servo id 1 in extended position mode |
#,#S |
Servo position. <id>,<degrees>S e.g. 2,90S moves servo id 2 to 90 degrees. |
#,#T |
Torque setting. <id>,<percent>T e.g. 1,50T sets servo id 1 to half strength. |
| if STEPPER_SUPPORT is enabled | |
#,#M |
stepper Motor setup. <step_pin>,<dir_pin>M. Defaults to pins 3 and 4. |
#,#V |
motion profile for the stepper. <accelleration>, <velocity limit>V in steps per unit time. Defaults to 240 and 480 |
#G |
Goto. Move the stepper motor to the specified position in step units. |
Commands can be strung together on one line; spaces, tabs, carrage returns and line feeds are all ignored. If no n is specified, value previously saved by , is used.
?
//returns something like: {"?":["10010000001111",739,625,569,525,493,470, 90.21, 0.00, 0.00]}
// where 10010000001111 shows the binary value of each pin, from 0 to 14. Pin 0 is first
// 739,625,569,525,493,470 are the values read from each analog channel 0 to 5
// 90.21, 0.00, 0.00 is the position, torque, and velocity of the selected servo id.
1?
//returns something like: {"1":[1,459]} where 1 is the binary value of pin 1 and
//459 is the analog value of channel 1
3,2?
//returns something like: {"3":[90.21, 0.00, 0.00]} where the values are the position
//torque and velocity of servo id 3. (2 is hard coded to mean "servo")
6?
//returns something like {"6":[0]} which is the value of pin 6 (no analog)
4L 6H 5,120A
//(nothing returned) Drives pin 4 low, pin 6 high and puts a PWM / Analog value of 120 on pin 5
//this also saves pin 5 as the default pin for all commands from now on
240A
//(nothing returned) assuming prior command was 5,120A put 240 out pin 5 as new analog value
90S
//(nothing returned) move the attached Dynamixel servo to 90 degrees.
?
//assuming 5, has been recieved before, returns just the value of pin 5 and analog 5
0,
//(nothing returned) clears saved pin, ? now returns all pins.
1000D 5,LHLHLHL
//(nothing returned) delay is 1 millisecond between commands. So pin 5 pulse 3 times at ~200Hz
//Actually about 1.04mS because of the time it takes to recieve and interpret each command.
//The delay command is also useful for making sure all the commands on a line arrive before they are
//excecuted. e.g.:
10000D 3D 5,LHLHL?
//will put out 2 pulses at 50uS per pulse or 10KHz without the 10000D, they are 163uS
//The time it takes to interpret a command is about 47uS so 3D makes it 50. For 100uS
//53D would work. Take the uS delay you want and subtract 47.
//With larger delays, the error is consistant but has relativly less effect.
// Note that the CYCLE_DELAY is not used as long as new characters are available.
1,4R50T90S
//Assuming an attached Dynamixel servo with an ID of 1, reset it to extended position mode, half
// strength, and move to 90 degrees.
| qty | item | price | source |
|---|---|---|---|
| 1 | Arduino | ~$25 | Arduino.cc (please support Arduino by buying real parts instead of cheap crappy knockoffs?) |
| 1 | Shield | $20 | http://en.robotis.com/shop_en/item.php?it_id=902-0146-000 |
| 1 | TTL Serial USB adapter | ~$2 | Google CP2102 or e.g. https://www.amazon.com/Diymore-Converter-Support-Windows-Arduino/dp/B0776T51YT/ref=sr_1_9 https://www.amazon.com/ADAFRUIT-Industries-954-Serial-Raspberry/dp/B00DJUHGHI/ref=sr_1_35 with cable built in. |
| 1 | DC adapter | ~$9 | Google AC/DC power adapter. The output voltage should match the requirement for the servo you are using. e.g. For the XC-430 https://www.amazon.com/Converter-Cigarette-Lighter-110-240V-Adapter/dp/B07DWXRD5F/ref=sr_1_4 |
| 1 | 4 pin JST cable | $? | Commonly available from hobby stores, online, etc... |
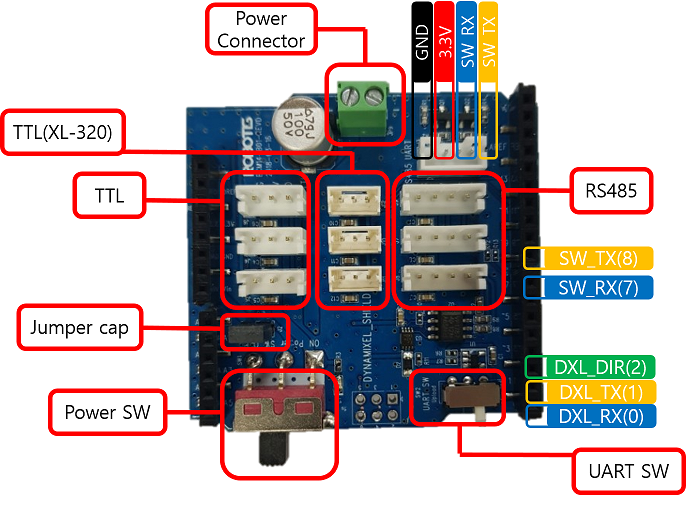
See: https://emanual.robotis.com/docs/en/parts/interface/dynamixel_shield/ for instructions and connections on the Shield.
- If you want the SERVO_SUPPORT: Install Dynamixel libraries into Arduino IDE (must be 1.8.5 or up) via menu: "Sketch" / "Include Libraries" / "Manage Libraries" and then search for Dynamixel. Select and then "Install" the DYNAMIXEL2Arduino and then DynamixelShield
- If you want the STEPPER_SUPPORT: Install the AccelStep library into the Arduino IDE via menu: "Sketch" / "Include Libraries" / "Manage Libraries" and then search for AccelStep. Select and then "Install" it.
- Download the .ino file above and place in folder of the same name under Arduino folder. e.g. Documents\Arduino\DynamixelShieldSetup\DynamixelShieldSetup.ino and open it.
- Modify the BAUD value around line 50 to what your servo uses (default is 57600) or whatever you like if you aren't using the servos, SERVO_ID to match the servo address (default is 1) and SERVO_MODE to match the mode (default is the extended position mode which might not be supported on your servo)
- Connect the Arduino /without the shield/ and program it.
- If you want the SERVO_SUPPORT: Connect the TTL serial adapter TTL Serial USB adapter to J3 on the shield. This is the small 4 pin connector off by itself near the green power terminal.
| Shield J3 pin | TTL adapter pin |
|---|---|
| G | GND |
| V | don't connect |
| R | TX |
| T | RX |
- Cut the DC volt adapter wires and strip them, then /carefully/ test to see which wire is positive and which negative before connecting to the shield. Getting that backwards will cost rather a lot. You should also be able to just use the barrel connector on the Arduino if you have the right adapter for that. Again, the voltage should match the servo's requirements.
- Plug the shield onto the Arduino.
- If you are using the Dynamixel Shield, check that the SW2 "UART" switch is in "DYANMIXEL" vs "UPLOAD" (see top right of picture below, switch is toward top of picture) and plug the TTL Serial adapter into your PC USB. Otherwise, (assuming you commented out the
#define SERVO_SUPPORT) just plug in to the Arduino like always. In either case, you will need to configure a serial terminal program like Arduino Serial Monitor, PuTTY, or RealTerm, or whatever to 57600 N 8 1 (or whatever BAUD was set to in the code) on whatever port that shows up on. - Turn on the AC adapter and verify that the Arduino power LED comes on. Press the reset switch on the Arduino. You should see
[{"Ready": "true"}]on your terminal program. Send?to test communications and ensure you get back a response. Send a command to turn the LED on or off, e.g.13Hand13Lshould be the pin on the Uno. - To use a Dynamixel, plug in a servo, and turn on the SW1 servo "POWER" switch. Check that the Servo LED blinks. (see bottom right of picture below, switch is toward top of picture). Reset the servo with it's id number and desired mode, e.g.
1,4Rand verify the servo blinks. Now enter e.g.90Sand verify the servo moves to 90 degrees. - To use a stepper driver, (assuming you commented IN the
#define STEPPER_SUPPORTand installed the library) connect ground to ground, then connect the step line to one of the available pin, e.g. 10 and step to another, e.g. 11. Power on the stepper driver and motor, then send e.g.10,11Mto initialze the system, and e.g.240,1000Vto set speed and acceleration, then use e.g.500Gand then0Gto move the motor a bit. You will need to change the V settings to match your system.

Note that the Dynamixel shield uses pins 0, 1, 2, 7, and 8. Normally, an Arduino will communicate with the PC on pins 0 and 1, but those are used to talk to the servoes, so 7 and 8 are used for communications with the PC via the USB adapter instead. The built in USB adapter on the Arduino is only used for uploading the sketch and is then rendered useless. Pin 2 is also used by the shield. All the other pins available on the Arduino are unused and available for your applications.
Analog IO pins actually start numbering after the digital IO pins. e.g. on an Arduino Uno, A0 is pin 14 because the last digital pin is 13. A0 is the name of the pin, 14 is its number (on an Uno).