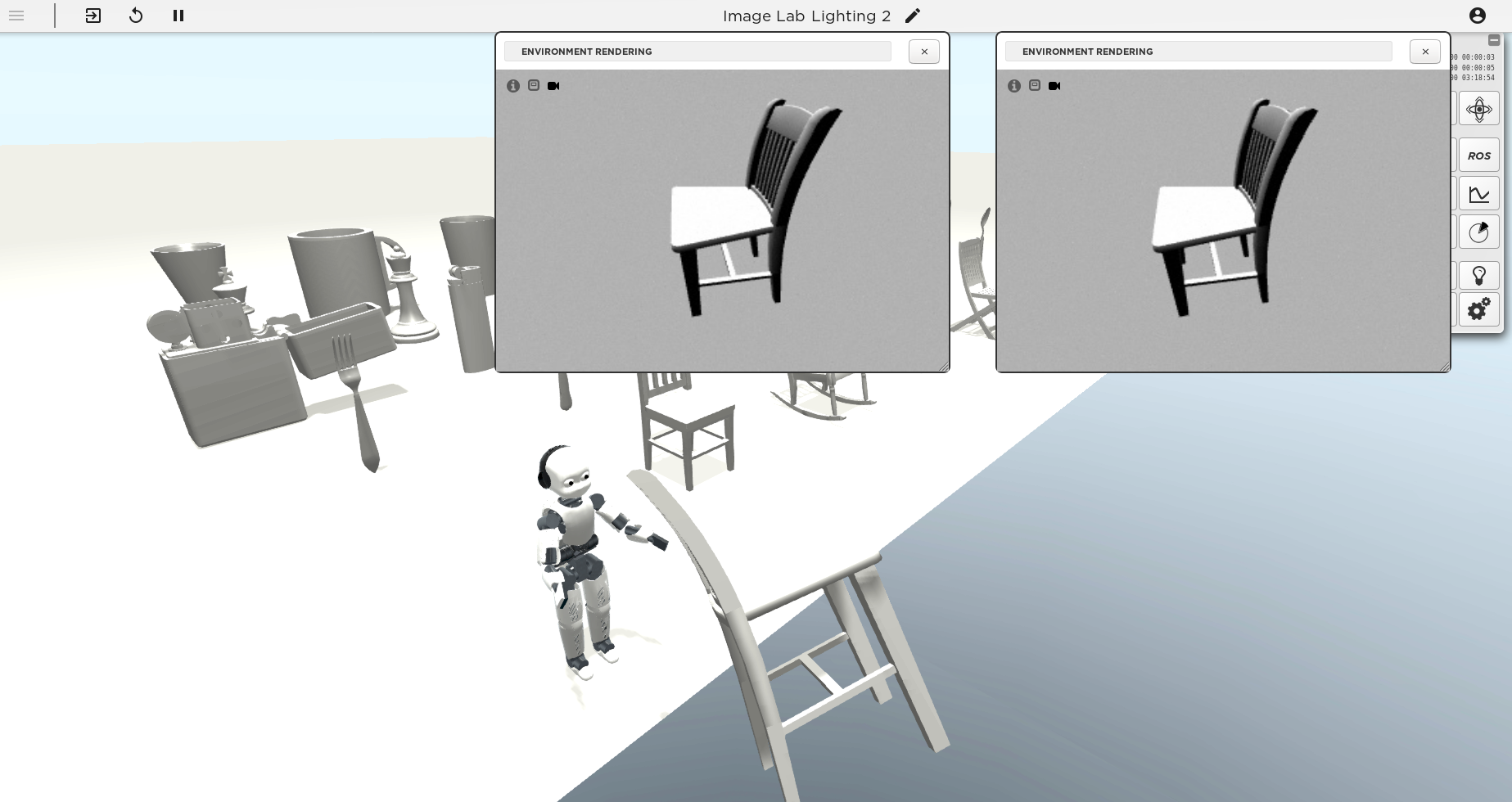
The object recognition task consists of 5 classes with 8 instances for each class. An experiment in the Neurorobotics Platform is provided, including a state machine which will place the objects in front of an iCub robot rotating it so as to cover multiple viewing angles and record sensor data. The recorded sensor data may be of different modalities (spike trains, images, point clouds etc.). Additionally several lighting setups are provided so as to augment the dataset.