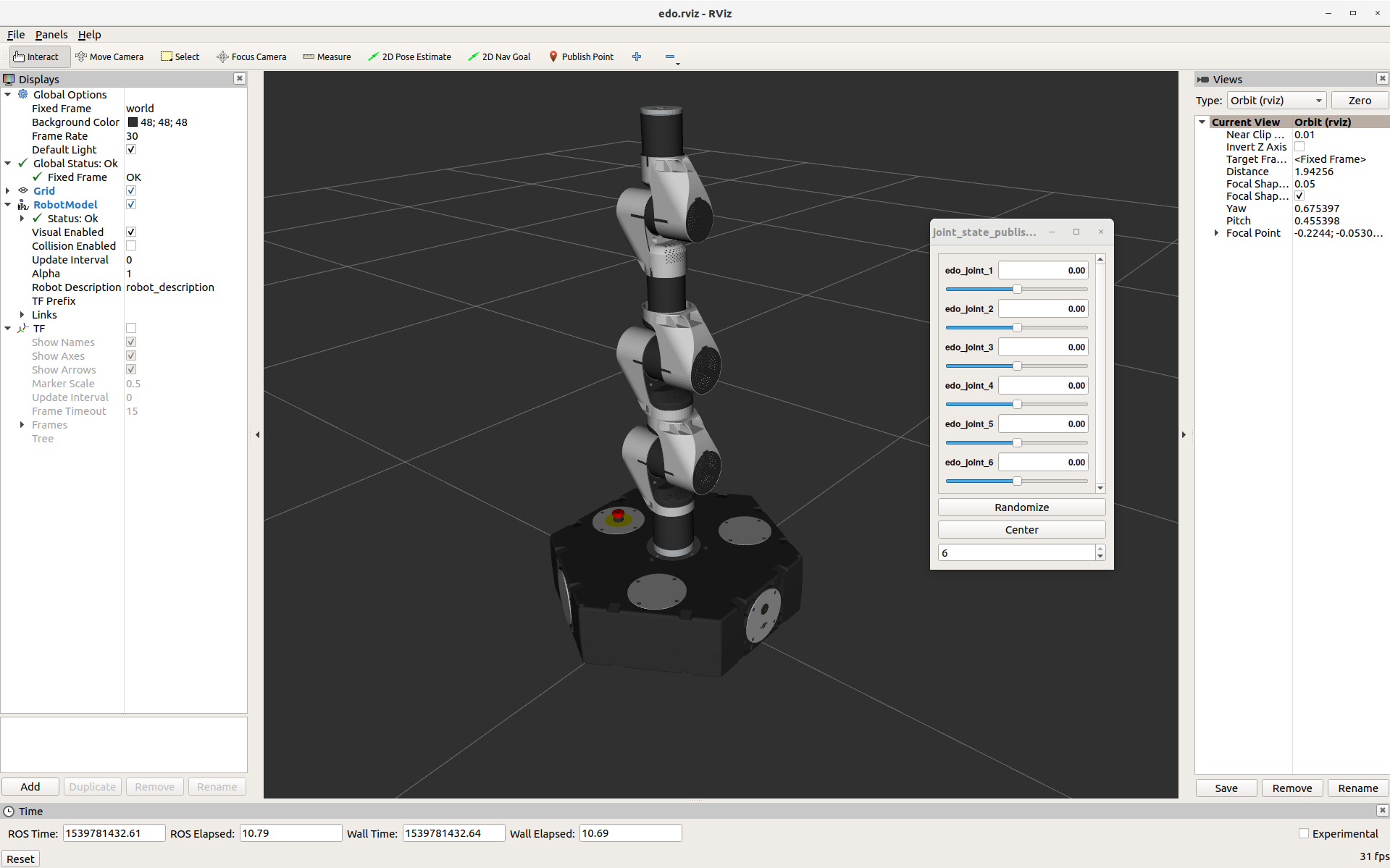
eDO description package This package containes the URDF file for eDO in ROS. Testing To test the URDF in RViz use the two commands: roslaunch edo_description edo_upload.launch roslaunch edo_description test.launch You will see RViz showing the e.Do: