This framework implements an experimental structure from motion pipeline designed for true spherical image. From an sequence of true spherical images, the pipeline is designed to take advantage of the specificity of such images to compute the 3D structure of the environment captured on the images. It implement a novel optimization algorithm that is able to deduce the pose of the image based on the matching features.
The considered true spherical images are characterized by the centrality of the camera that captured them. A camera able to capture true spherical is then understood as a camera that focus all rays of light on the same and unique focal point, producing parallax-free panoramic images.
The ScanVan Project was funded by the Swiss National Science Foundation (SNF, PNR 76 Big Data) and won by the DHLAB of EPFL and the HES-SO Valais Wallis. The goal of the project was to demonstrate the possibility of city mass and continuous digitization using central spherical cameras. Using such device allows to simplify the 3D structures computation and to drastically decrease the complexity of images acquisition.
The EPFL team realized the theoretical design of the camera and defined a new pose estimation algorithm able to be applied to the case of images acquired by such device. The HES-SO Valais Wallis were in charge of translating the theoretic design of the camera into a physical device achieving the centrality. The codes implementation, validation and testing was shared between the two teams.
Summary of the ScanVan Project codes :
- Camera calibration
- Camera images acquisition
- Camera images debayering
- Panoramic images computation
- Structure from spheres framework
- Spherical dataset example
These codes and the physical camera give access to a full city digitization pipeline. Other codes were implemented during the research phase and can be found here.
As an example of the sfs-framework usage, a small set of spherical images is used. These images are produced by the spherical central camera built during the ScanVan Project. The following illustrations show a summary of the images used for this example :

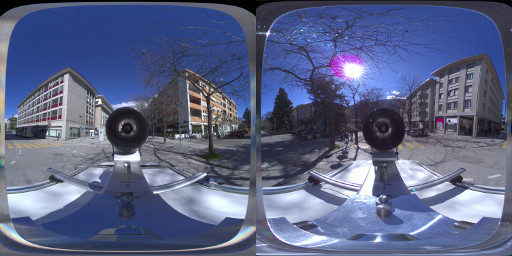
Illustration of the spherical images dataset
The images are all expected to be in equirectangular representation. The following image shows the prototype of the central spherical camera built during the project :

Central spherical camera prototype
The used images along with all input configuration and pipeline outputs of the presented example case are available in the following repository as a reference.
As a first step, a directories structure is created for the images, the configuration, the mask and the pipeline outputs :
mkdir -p ~/sfs-framework-example/image
mkdir -p ~/sfs-framework-example/output
Simply place the spherical images in the image directory. The pipeline uses the alphabetical order to import and process the images.
As the camera acquire almost everything surrounding it, it also capture part of itself and the vehicle on which it is mounted. A mask image is then provided to the pipeline to indicates the pixel areas to drop during reconstruction process. In the example, the mask is placed as follows :
~/sfs-framework-example/mask.png
The configuration of the pipeline for this set of images is provided through a YAML file stored in the main directory. The detail of its content can be found in the YAML file provided with the example dataset.
~/sfs-framework-example/config.yaml
The next step consists in computing the odometry of the images which produces a sparse model. The computation of the odometry is made to compute the relative rotations and translations that appear between the images. The frame in which the position and orientation are expressed is the frame of the first image. To start the odometry computation, the following command can be used :
bin/sfs-framework ~/sfs-framework-example/config.yaml
At the end of the odometry computation process, the following sparse model, located in the output directory through the sparse_structure.xyz file, should be obtained :


Example of sparse model obtain with a sequence of five spherical images
As the odometry is computed, the dense model can be computed. The densification takes advantage of the odometry to place as many images pixels in the three dimensional space as possible to produce a representative model. To start the computation of the densification, simply change the YAML configuration line :
type: sparse
->
type: dense
and use the same command as for the computation of the odometry. The densification is performed using the third-party optical flow library, which consumes memory and takes time. At the end of the densification process, the following model should be obtained :


Example of dense model obtain with a sequence of five spherical images
The proposed pipeline remains experimental. As a first limitation, the pipeline only rely on the image order to performed the reconstruction. It is then a purely sequential process that rely on the order of the images. The pipeline does not check for loop-closing and is not able to establish the full connectivity graph of the provided images, which limits is applicability.
The second limitation comes from the implemented algorithm. Despite the great advantage of its simplicity, it is difficult to establish its stability only on the tests we made. As it relies on the centrality of the camera acquiring the images, it is not clear how far it is able to deal with non-central images. In addition, it is not clear how far it can limits the error drift as more and more images are added to the sequence.
As a conclusion, this approach looks promising and the surprising simplicity of such algorithm able to deduce three dimensional models from images sequences is very interesting. Nevertheless, years of research and testing are still required to ensure a reliable and operational framework.
sfs-framework - Nils Hamel, Charles Papon
Copyright (c) 2019-2020 DHLAB, EPFL & HES-SO Valais-Wallis
This program is licensed under the terms of the GNU GPLv3. Documentation and illustrations are licensed under the terms of the CC BY 4.0.
See COPYRIGHT file for third parties redistribution.
The sfs-framework comes with the following package (Ubuntu 16.04 LTS) dependencies (Instructions) :
- build-essential
- cmake
- libeigen3-dev
and the following external dependencies (Instructions) :
- opencv 4.0.1
- yaml-cpp 0.6.3
To clone the repository, use the command :
$ git clone https://github.com/ScanVan/sfs-framework.git
To build the framework code, use the procedure :
$ cd sfs-framework
$ mkdir Build
$ cd Build
$ cmake . ..
$ make -j [ncores]
To run the framework, use the command :
$ bin/sfs-framework [YAML configuration file]