-
Notifications
You must be signed in to change notification settings - Fork 31
Commit
This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository.
- Loading branch information
0 parents
commit e3172b6
Showing
23 changed files
with
2,728 additions
and
0 deletions.
There are no files selected for viewing
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,136 @@ | ||
| # Byte-compiled / optimized / DLL files | ||
| __pycache__/ | ||
| *.py[cod] | ||
| *$py.class | ||
|
|
||
| # C extensions | ||
| *.so | ||
|
|
||
| # Distribution / packaging | ||
| .Python | ||
| build/ | ||
| develop-eggs/ | ||
| dist/ | ||
| downloads/ | ||
| eggs/ | ||
| .eggs/ | ||
| lib/ | ||
| lib64/ | ||
| parts/ | ||
| sdist/ | ||
| var/ | ||
| wheels/ | ||
| *.egg-info/ | ||
| .installed.cfg | ||
| *.egg | ||
|
|
||
| # PyInstaller | ||
| # Usually these files are written by a python script from a template | ||
| # before PyInstaller builds the exe, so as to inject date/other infos into it. | ||
| *.manifest | ||
| *.spec | ||
|
|
||
| # Installer logs | ||
| pip-log.txt | ||
| pip-delete-this-directory.txt | ||
|
|
||
| # Unit test / coverage reports | ||
| htmlcov/ | ||
| .tox/ | ||
| .coverage | ||
| .coverage.* | ||
| .cache | ||
| nosetests.xml | ||
| coverage.xml | ||
| *.cover | ||
| .hypothesis/ | ||
|
|
||
| # Translations | ||
| *.mo | ||
| *.pot | ||
|
|
||
| # Django stuff: | ||
| *.log | ||
| local_settings.py | ||
|
|
||
| # Flask stuff: | ||
| instance/ | ||
| .webassets-cache | ||
|
|
||
| # Scrapy stuff: | ||
| .scrapy | ||
|
|
||
| # Sphinx documentation | ||
| docs/_build/ | ||
|
|
||
| # PyBuilder | ||
| target/ | ||
|
|
||
| # Jupyter Notebook | ||
| .ipynb_checkpoints | ||
|
|
||
| # pyenv | ||
| .python-version | ||
|
|
||
| # celery beat schedule file | ||
| celerybeat-schedule | ||
|
|
||
| # SageMath parsed files | ||
| *.sage.py | ||
|
|
||
| # Environments | ||
| .env | ||
| .venv | ||
| env/ | ||
| venv/ | ||
| ENV/ | ||
|
|
||
| # Spyder project settings | ||
| .spyderproject | ||
| .spyproject | ||
|
|
||
| # Rope project settings | ||
| .ropeproject | ||
|
|
||
| # mkdocs documentation | ||
| /site | ||
|
|
||
| # mypy | ||
| .mypy_cache/ | ||
|
|
||
| # Prerequisites | ||
| *.d | ||
|
|
||
| # Compiled Object files | ||
| *.slo | ||
| *.lo | ||
| *.o | ||
| *.obj | ||
|
|
||
| # Precompiled Headers | ||
| *.gch | ||
| *.pch | ||
|
|
||
| # Compiled Dynamic libraries | ||
| *.so | ||
| *.dylib | ||
| *.dll | ||
|
|
||
| # Fortran module files | ||
| *.mod | ||
| *.smod | ||
|
|
||
| # Compiled Static libraries | ||
| *.lai | ||
| *.la | ||
| *.a | ||
| *.lib | ||
|
|
||
| # Executables | ||
| *.exe | ||
| *.out | ||
| *.app | ||
|
|
||
| local/ | ||
| train_log*/ | ||
| results/ |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,81 @@ | ||
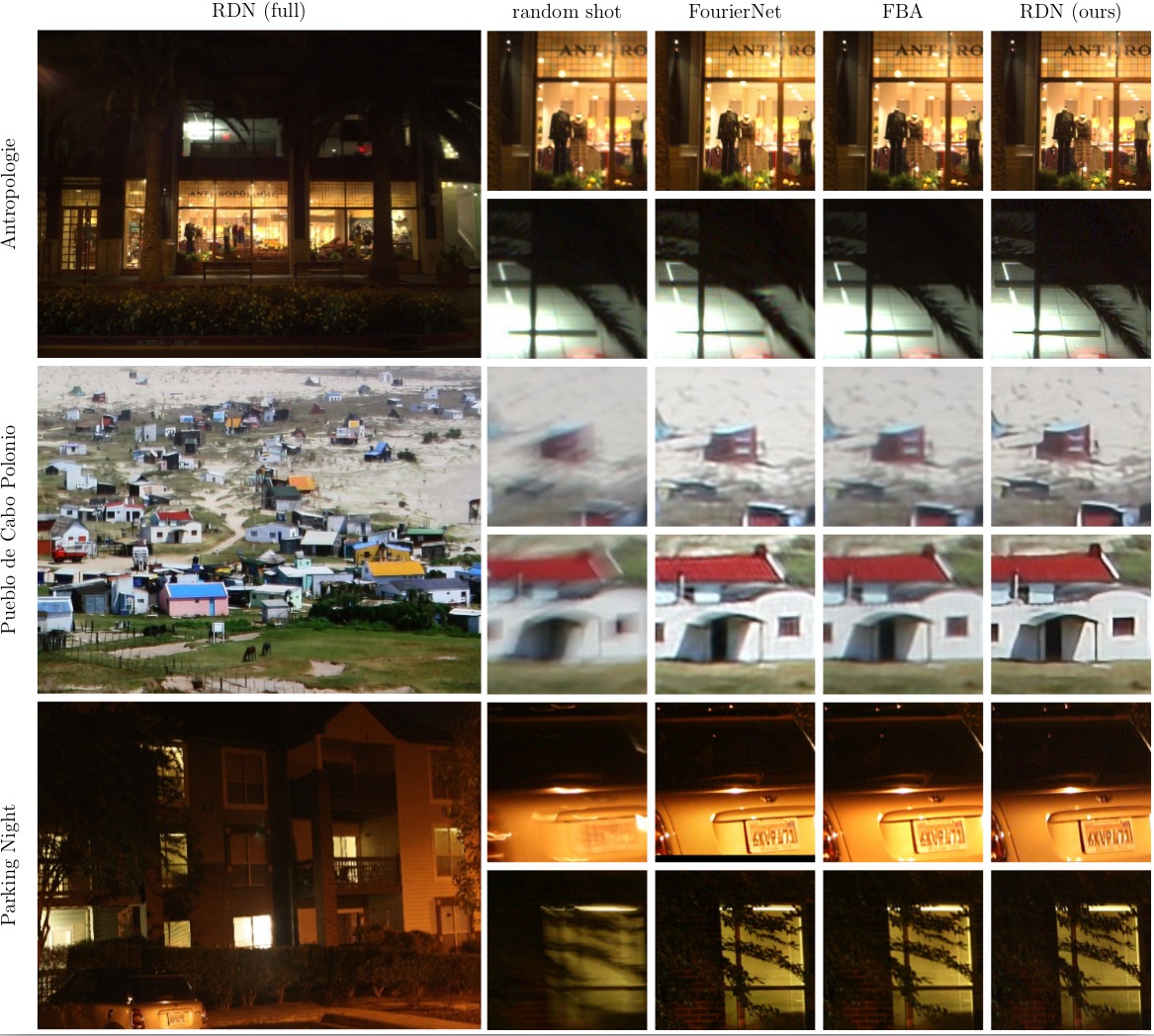
| # Learning Blind Motion Deblurring | ||
|
|
||
| TensorFlow implementation of multi-frame blind deconvolution: | ||
|
|
||
| **Learning Blind Motion Deblurring**<br> | ||
| Patrick Wieschollek, Michael Hirsch, Bernhard Schölkopf, Hendrik P.A. Lensch<br> | ||
| *ICCV 2017* | ||
|
|
||
|  | ||
|
|
||
|
|
||
| ## Prerequisites | ||
| ### 1. Get YouTube videos | ||
|
|
||
| The first step is to gather videos from some arbitrary sources. We use YouTube to get some videos with diverse content and recording equipment. To download these videos, we use the python-tool `youtube-dl`. | ||
|
|
||
| ```bash | ||
| pip install youtube-dl --user | ||
| ``` | ||
|
|
||
| Some examples are given in `download_videos.sh`. Note, you can use whatever mp4 video you want to use for this task. In fact, for this re-implementation we use some other videos, which also work well. | ||
|
|
||
| ### 2. Generate Synthetic Motion Blur | ||
|
|
||
| Now, we use optical flow to synthetically add motion blur. We used the most simple OpticalFlow method, wich provides reasonable results (we average frames anyway): | ||
|
|
||
| ```bash | ||
| cd synthblur | ||
| mkdir build && cd build | ||
| cmake .. | ||
| make all | ||
| ``` | ||
|
|
||
| To convert a video `input.mp4` into a blurry version, run | ||
|
|
||
| ```bash | ||
| ./synthblur/build/convert "input.mp4" | ||
| ``` | ||
|
|
||
| This gives you multiple outputs: | ||
| - 'input.mp4_blurry.mp4' | ||
| - 'input.mp4_sharp.mp4' | ||
| - 'input.mp4_flow.mp4' | ||
|
|
||
| Adding blur from synthetic camera shake is done on-the-fly (see `psf.py`). | ||
|
|
||
| ### 3. Building a Database | ||
| For performance reasons we randomly sample frames from all videos beforehand and store 5+5 consecutive frames (sharp+blurry) into an LMDB file (for training/validation/testing). | ||
|
|
||
| I use | ||
|
|
||
| ```bash | ||
| #!/bin/bash | ||
| for i in `seq 1 30`; do | ||
| python data_sampler.py --pattern '/graphics/scratch/wieschol/YouTubeDataset/train/*_blurry.mp4' --lmdb /graphics/scratch/wieschol/YouTubeDataset/train$i.lmdb --num 5000 | ||
| done | ||
|
|
||
| for i in `seq 1 10`; do | ||
| python data_sampler.py --pattern '/graphics/scratch/wieschol/YouTubeDataset/val/*_blurry.mp4' --lmdb /graphics/scratch/wieschol/YouTubeDataset/val$i.lmdb --num 5000 | ||
| done | ||
|
|
||
| ``` | ||
|
|
||
| To visualize the training examples just run | ||
|
|
||
| ```bash | ||
| python data_provider.py --lmdb /graphics/scratch/wieschol/YouTubeDataset/train1.lmdb --show --num 5000 | ||
| ``` | ||
|
|
||
|
|
||
| ## Training | ||
|
|
||
| This re-imlementation uses [TensorPack](https://github.com/ppwwyyxx/tensorpack) instead of a custom library. Starting training is done by | ||
|
|
||
| ```bash | ||
| python learning_blind_motion_deblurring_singlescale.py --gpu 0,1 --data path/to/lmdb-files/ | ||
| ``` | ||
|
|
||
|
|
||
| ## Further experiments | ||
| We further tried a convLSTM/convGRU and a multi-scale approach (instead of the simple test from the paper). These script are available in `additional_scripts`. |
This file contains bidirectional Unicode text that may be interpreted or compiled differently than what appears below. To review, open the file in an editor that reveals hidden Unicode characters.
Learn more about bidirectional Unicode characters
| Original file line number | Diff line number | Diff line change |
|---|---|---|
| @@ -0,0 +1,165 @@ | ||
| from abc import ABCMeta, abstractmethod, abstractproperty | ||
| import tensorflow as tf | ||
| from tensorpack import * | ||
| from tensorpack.tfutils.scope_utils import auto_reuse_variable_scope | ||
|
|
||
| """ | ||
| References: | ||
| http://colah.github.io/posts/2015-08-Understanding-LSTMs/ | ||
| http://www.wildml.com/2015/10/recurrent-neural-network-tutorial-part-4-implementing-a-grulstm-rnn-with-python-and-theano/ | ||
| """ | ||
|
|
||
|
|
||
| class ConvRNNCell(object): | ||
| __metaclass__ = ABCMeta | ||
|
|
||
| def __init__(self, tensor_shape, out_channel, kernel_shape, nl=tf.nn.tanh, normalize_fn=None): | ||
| """Abstract representation for 2D recurrent cells. | ||
| Args: | ||
| tensor_shape: shape of inputs (must be fully specified) | ||
| out_channel: number of output channels | ||
| kernel_shape: size of filters | ||
| nl (TYPE, optional): non-linearity (default: tf.nn.tanh) | ||
| normalize_fn (None, optional): normalization steps (e.g. tf.contrib.layers.layer_norm) | ||
| """ | ||
| super(ConvRNNCell, self).__init__() | ||
| self.state_tensor = None | ||
|
|
||
| assert len(tensor_shape), "tensor_shape should have 4 dims [BHWC]" | ||
|
|
||
| self.input_shape = tensor_shape | ||
| self.out_channel = out_channel | ||
| self.kernel_shape = kernel_shape | ||
|
|
||
| self.nl = nl | ||
| self.normalize_fn = normalize_fn | ||
|
|
||
| @abstractproperty | ||
| def default_state(self): | ||
| pass | ||
|
|
||
| def state(self): | ||
| if self.state_tensor is None: | ||
| self.state_tensor = self.default_state() | ||
| return self.state_tensor | ||
|
|
||
| @abstractmethod | ||
| def _calc(self, tensor): | ||
| pass | ||
|
|
||
| def __call__(self, tensor): | ||
| return self._calc(tensor) | ||
|
|
||
|
|
||
| class ConvLSTMCell(ConvRNNCell): | ||
| """Represent LSTM-layer using convolutions. | ||
| conv_gates: | ||
| i = sigma(x*U1 + s*W1) input gate | ||
| f = sigma(x*U2 + s*W2) forget gate | ||
| o = sigma(x*U3 + s*W3) output gate | ||
| g = tanh(x*U4 + s*W4) candidate hidden state | ||
| memory update: | ||
| c = c * f + g * i internal memory | ||
| s = tanh(c) * o output hiden state | ||
| """ | ||
| def default_state(self): | ||
| b, h, w, c = self.input_shape | ||
| return (tf.zeros([b, h, w, self.out_channel]), tf.zeros([b, h, w, self.out_channel])) | ||
|
|
||
| @auto_reuse_variable_scope | ||
| def __call__(self, x): | ||
| c, s = self.state() | ||
|
|
||
| xs = tf.concat(axis=3, values=[x, s]) | ||
| igfo = Conv2D('conv_gates', xs, 4 * self.out_channel, self.kernel_shape, | ||
| nl=tf.identity, use_bias=(self.normalize_fn is None)) | ||
| # i = input_gate, g = hidden state, f = forget_gate, o = output_gate | ||
| i, g, f, o = tf.split(axis=3, num_or_size_splits=4, value=igfo) | ||
|
|
||
| if self.normalize_fn is not None: | ||
| i, g = self.normalize_fn(i), self.normalize_fn(g) | ||
| f, o = self.normalize_fn(f), self.normalize_fn(o) | ||
|
|
||
| i, g = tf.nn.sigmoid(i), self.nl(g) | ||
| f, o = tf.nn.sigmoid(f), tf.nn.sigmoid(o) | ||
|
|
||
| # memory update | ||
| c = c * f + g * i | ||
| if self.normalize_fn is not None: | ||
| c = self.normalize_fn(c) | ||
|
|
||
| # output | ||
| s = self.nl(c) * tf.nn.sigmoid(o) | ||
| self.state_tensor = (c, s) | ||
|
|
||
| return s | ||
|
|
||
|
|
||
| class ConvGRUCell(ConvRNNCell): | ||
| """Represent GRU-layer using convolutions. | ||
| z = sigma(x*U1 + s*W1) update gate | ||
| r = sigma(x*U2 + s*W2) reset gate | ||
| h = tanh(x*U3 + (s*r)*W3) | ||
| s = (1-z)*h + z*s | ||
| """ | ||
| def default_state(self): | ||
| """GRU just uses the output as the state for the next computation. | ||
| """ | ||
| b, h, w, c = self.input_shape | ||
| return tf.zeros([b, h, w, self.out_channel]) | ||
|
|
||
| @auto_reuse_variable_scope | ||
| def _calc(self, x): | ||
| s = self.state() | ||
|
|
||
| # we concat x and s to reduce the number of conv-calls | ||
| xs = tf.concat(axis=3, values=[x, s]) | ||
| zr = Conv2D('conv_zr', xs, 2 * self.out_channel, self.kernel_shape, | ||
| nl=tf.identity, use_bias=(self.normalize_fn is None)) | ||
|
|
||
| # z (update gate), r (reset gate) | ||
| z, r = tf.split(axis=3, num_or_size_splits=2, value=zr) | ||
|
|
||
| if self.normalize_fn is not None: | ||
| r, z = self.normalize_fn(r), self.normalize_fn(z) | ||
|
|
||
| r, z = tf.sigmoid(r), tf.sigmoid(z) | ||
|
|
||
| h = tf.concat(axis=3, values=[x, s * r]) | ||
| h = Conv2D('conv_h', h, self.out_channel, self.kernel_shape, | ||
| nl=tf.identity, use_bias=(self.normalize_fn is None)) | ||
|
|
||
| if self.normalize_fn is not None: | ||
| h = self.normalize_fn(h) | ||
|
|
||
| h = self.nl(h) | ||
| s = (1 - z) * h + z * s | ||
|
|
||
| self.state_tensor = s | ||
|
|
||
| return s | ||
|
|
||
|
|
||
| @layer_register() | ||
| def ConvRNN(x, cell): | ||
| assert len(x.get_shape().as_list()) == 4, "input in ConvRNN should be B,H,W,C" | ||
| return cell(x) | ||
|
|
||
|
|
||
| @layer_register() | ||
| def ConvRNN_unroll(x, cell): | ||
| assert len(x.get_shape().as_list()) == 5, "input in ConvRNN should be B,T,H,W,C" | ||
| time_dim = x.get_shape().as_list()[1] | ||
|
|
||
| outputs = [] | ||
| for t in range(time_dim): | ||
| outputs.append(cell(x[:, t, :, :, :])) | ||
|
|
||
| return tf.stack(outputs, axis=1) |
Oops, something went wrong.