Extract trajectory with topics that contain containing nav_msgs/Odometry.
- bagfiles with topics that contain
nav_msgs/Odometrymessages.
Check .bag:
rosbag info <file.bag>
...
types: nav_msgs/Odometry
topics: /integrated_to_init
...
- trajectory.txt
1497705851.35 -0.0113885076717 -1.09817642624e-06 0.00693530961871 6.2331225421e-06 -0.000854817389752 6.7346687524e-06 0.999999634601
1497705851.46 -0.0229631382972 -1.20041595437e-05 0.0135130966082 1.53998456449e-05 -0.000962992962284 6.34903556518e-06 0.999999536183
1497705851.56 -0.0341137200594 2.92173426715e-05 0.00636271294206 2.10170615833e-05 -0.000765090764832 9.8156363075e-06 0.999999707049
1497705851.67 -0.0281987823546 4.50947554782e-05 0.0080398786813 2.69942153636e-05 -0.000359260024172 5.08400885803e-06 0.999999935089
1497705851.77 -0.0341357178986 3.85829880543e-05 0.00421400088817 2.95107239816e-05 -0.000356331106573 8.57329788175e-07 0.999999936078
Check the file with head -n5 trajectory.txt
- File format:
timestamp tx ty tz qx qy qz qw
- timestamp (float) gives the number of seconds.
- tx ty tz (3 floats) give the position, where t is the translation vector.
- qx qy qz qw (4 floats) give the orientation, where q is a quaternion describing the rotation.
Note: with each value separated by a space.
More info: https://vision.in.tum.de/data/datasets/rgbd-dataset/file_formats
-
Rename the topic '/integrated_to_init' and rename the file 'trajectory.txt'
-
Extract trajectory with:
python extract_data.py
- Play existing bag files:
rosbag play <file.bag>
Note: trajectory.txt is a sample file generated from extract_data.py
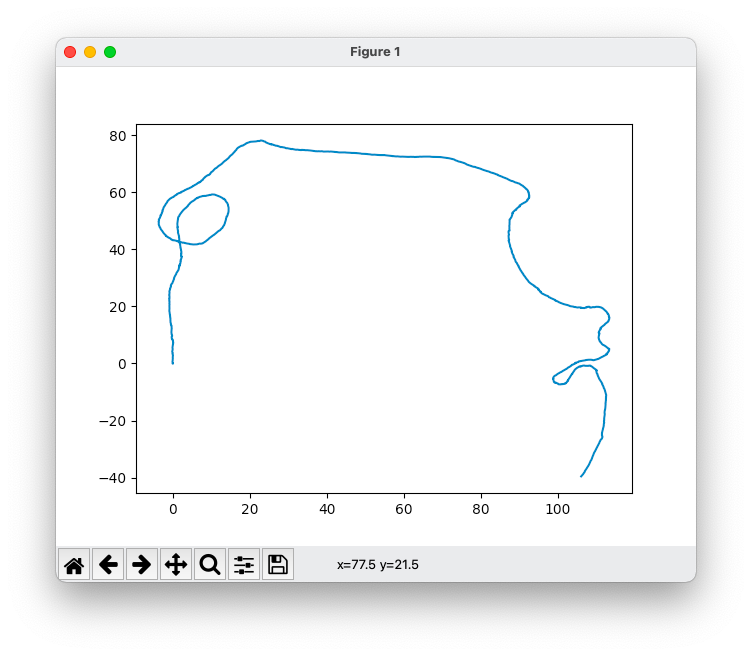
- With plot_data.py:
python plot_data.py <file.txt>
python plot_data.py trajectory.txt
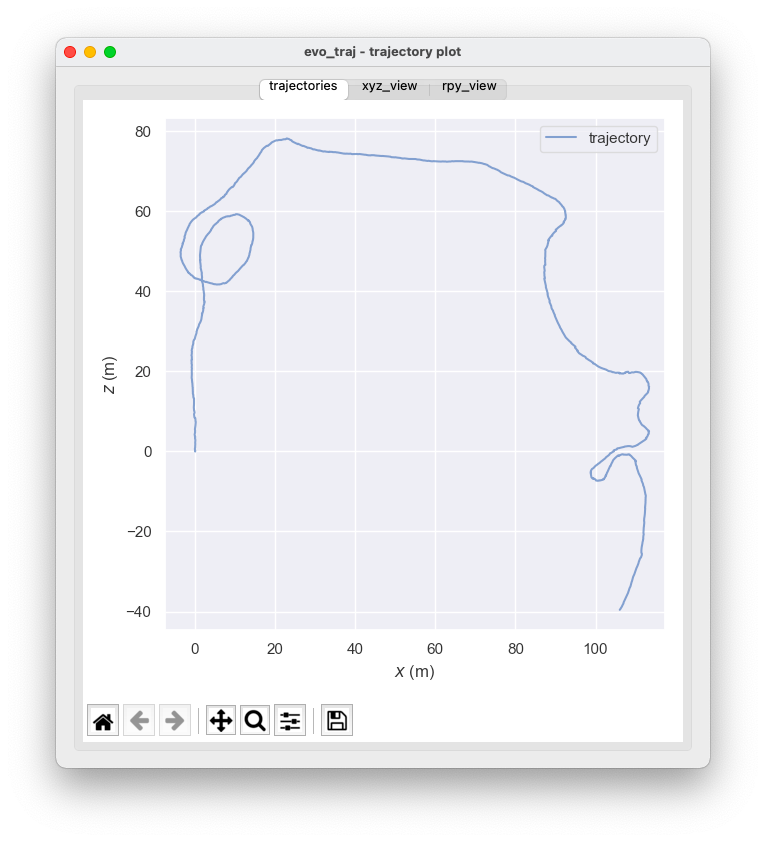
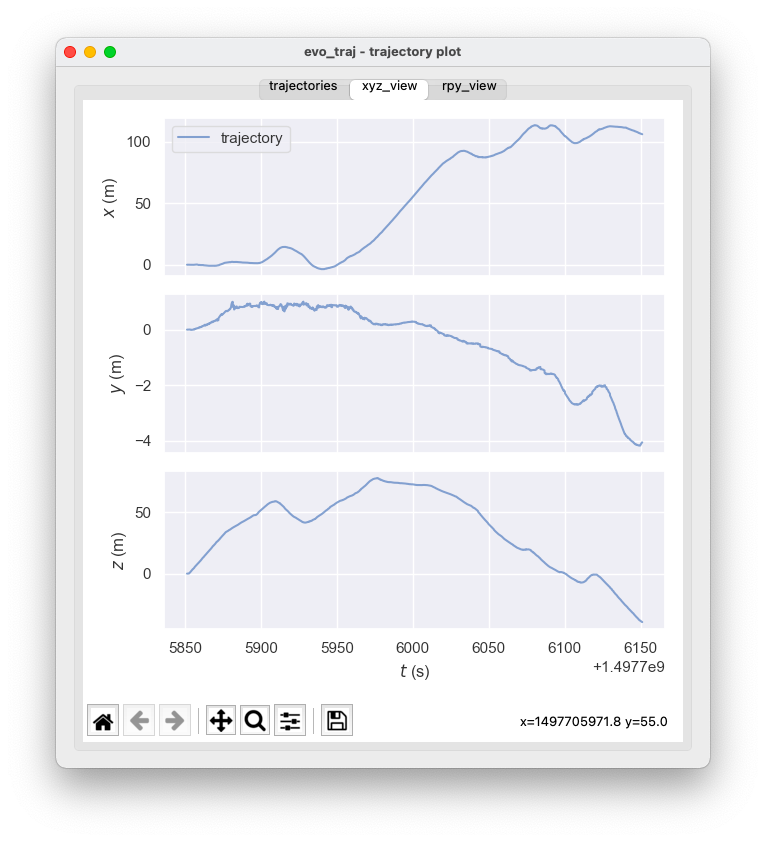
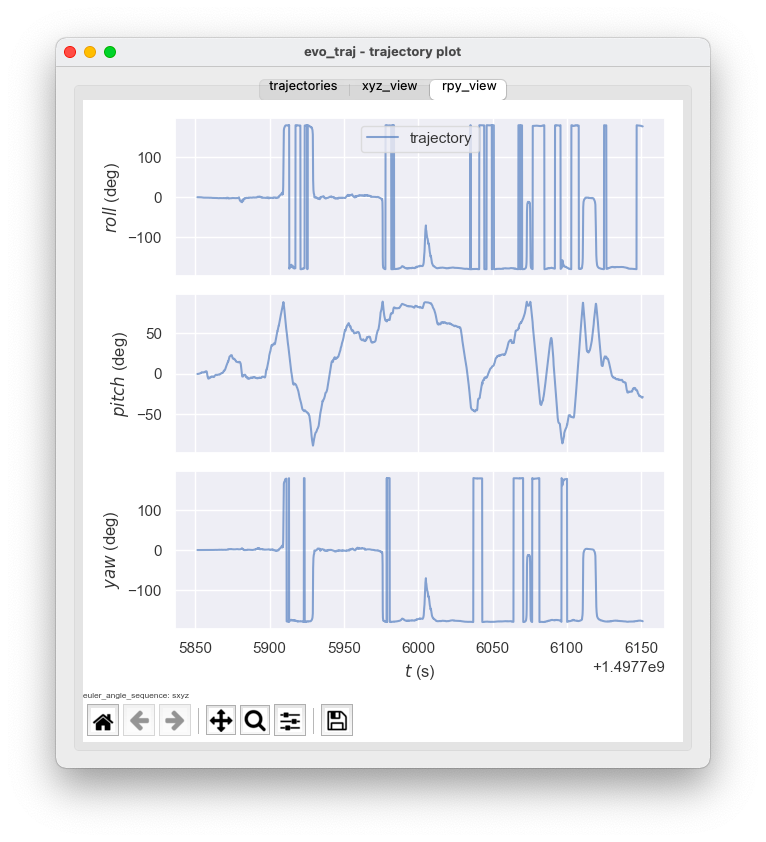
With evo kit: MichaelGrupp/evo
evo_traj tum trajectory.txt -p --plot_mode=xz