Display explanations

| Nr | Content |
|---|---|
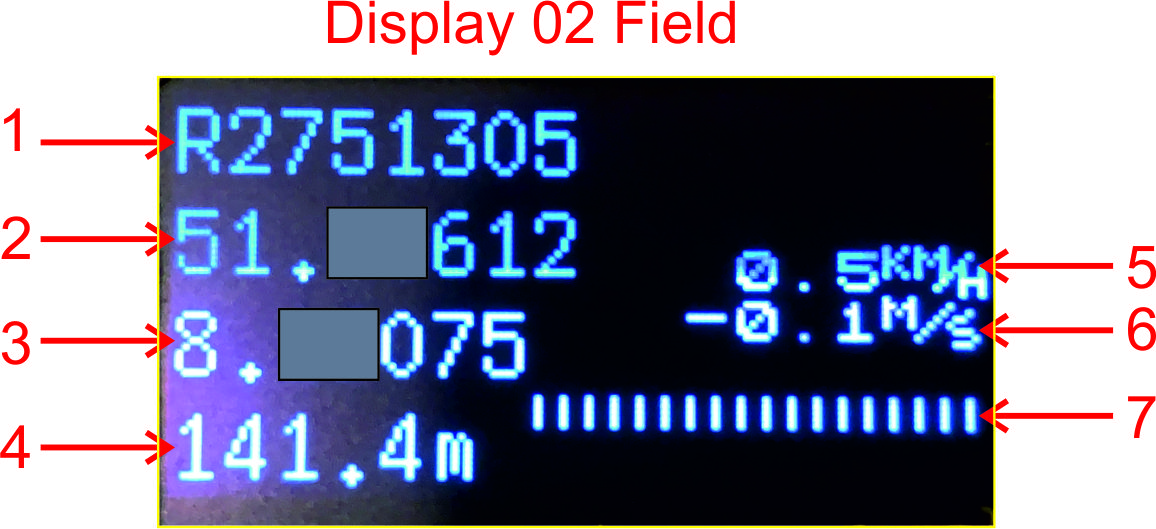
| 1 | Sonde type |
| 2 | Sonde ID |
| 3 | Latitude |
| 4 | Longitude |
| 5 | RSSI (signal strength) |
| 6 | Sonde frequency |
| 7 | Altitude |
| 8 | Horizontal speed |
| 9 | Vertical speed |
| 10 | Reception status of last 18 frames: |=ok, .=no rx (no frame start detected within about 1s), E=rx with error (depending on sonde: crc error, rs decoding error, etc.) |
| Nr | Content |
|---|---|
| 1 | Sonde ID |
| 2 | Latitude |
| 3 | Longitude |
| 4 | Altitude |
| 5 | Horizontal speed |
| 6 | Vertical speed |
| 7 | Reception status of last 18 frames: |=ok, .=no rx (no frame start detected within about 1s), E=rx with error (depending on sonde: crc error, rs decoding error, etc.) |
| Nr | Content |
|---|---|
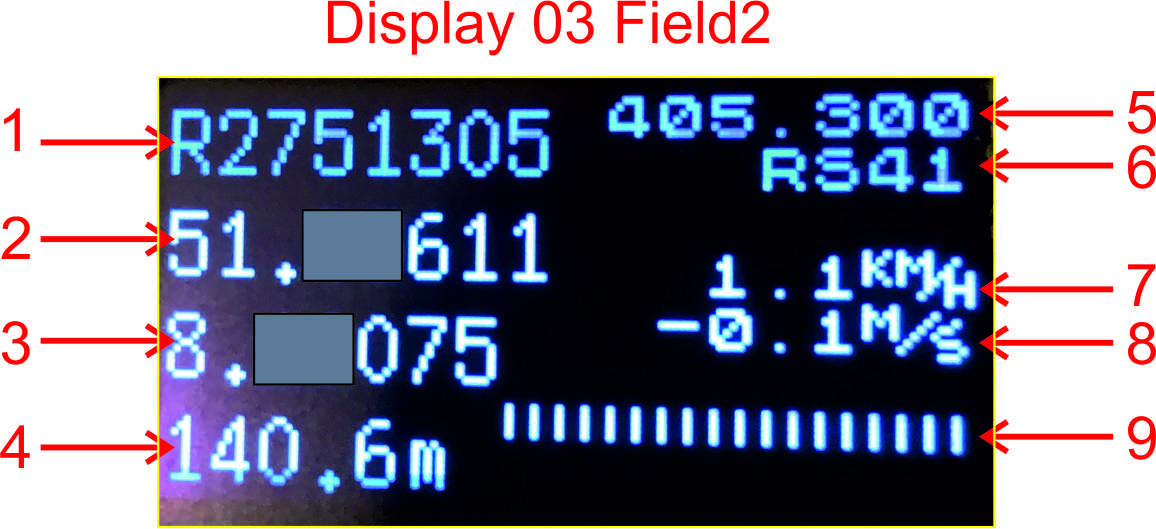
| 1 | Sonde ID |
| 2 | Latitude |
| 3 | Longitude |
| 4 | Altitude |
| 5 | Sonde frequency |
| 6 | Sonde type |
| 7 | Horizontal speed |
| 8 | Vertical speed |
| 9 | Reception status of last 18 frames: |=ok, .=no rx (no frame start detected within about 1s), E=rx with error (depending on sonde: crc error, rs decoding error, etc.) |

| Nr | Content |
|---|---|
| 1 | Sonde ID |
| 2 | Latitude |
| 3 | Longitude |
| 4 | Symbol on the left if TTGO GPS fix; d=xxx: distance to sonde |
| 5 | Sonde frequency |
| 6 | Sonde type |
| 7 | Altitude |
| 8 | Horizontal speed |
| 9 | Vertical speed |
| 10 | Course over ground (COG) of TTGO, Bearing (difference between COG and direction to sonde) 0=moving towards sonde |
| 11 | Reception status of last 18 frames: |=ok, .=no rx (no frame start detected within about 1s), E=rx with error (depending on sonde: crc error, rs decoding error, etc.) |
| 12 | Direction to sonde (0=north, 90=east, 180=south, 270=west) |