{kind=link}

This project runs a matlab serial server on an Arduino Uno which gathers inertial data to pass back to the host computer and operates the DC motor to generate a desired attitude profile for truth comparison.
Run the project with the included script KalmanGUI2.m. This script relies on the program kalman_server.ino to be running on the Arduino and connected to the host over serial.
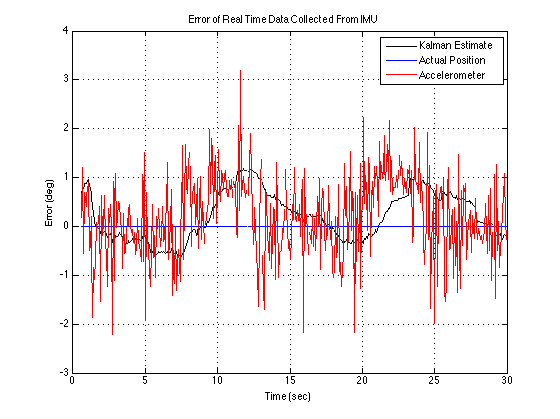
The figure below shows the error between the Kalman Filter estimate and the accelerometer measurement:
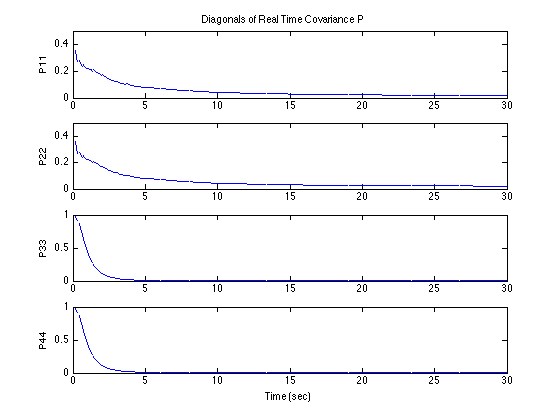
The figure below shows the diagonals of the Error State Covariance Matrix: