![]()

{kind=link}
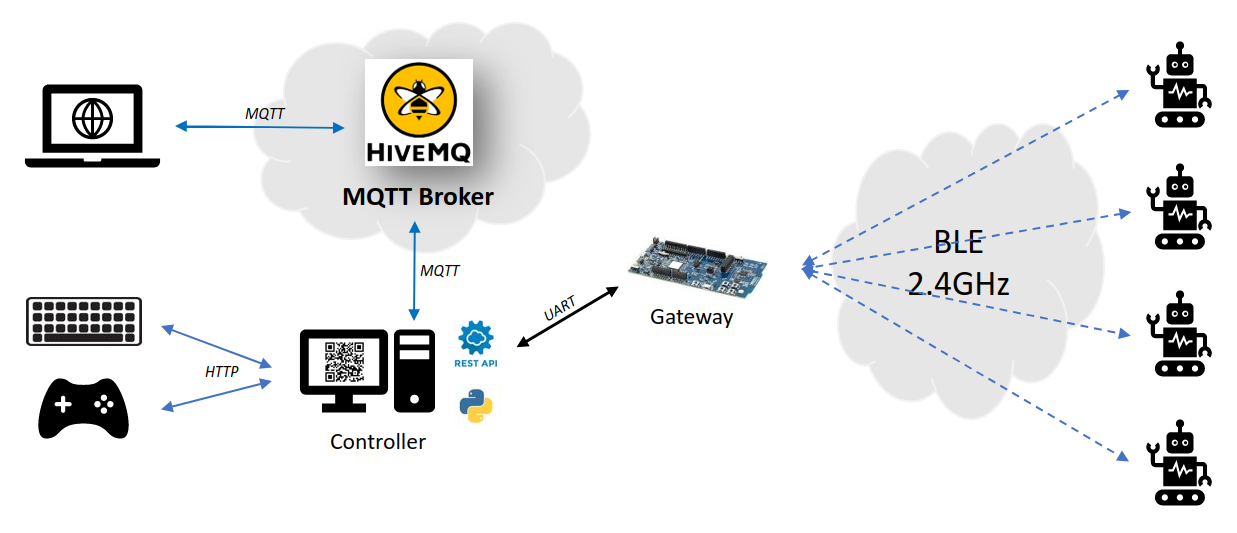
This package contains a complete environment for controlling and visualizing DotBots.
The DotBots hardware design can be found here (PCB). The firmware running on the DotBots can be found here.
This package can also be used to control devices running the SailBot firmware application.
Run pip install pydotbot
Flash the required firmwares on the DotBots and gateway board (use an nRF52833DK/nRF52840DK/nrf5340DK board as gateway), as explained in the DotBots firmware repository.
dotbot-controller --help
Usage: dotbot-controller [OPTIONS]
DotBotController, universal SailBot and DotBot controller.
Options:
-p, --port TEXT Virtual com port. Defaults to '/dev/ttyACM0'
-b, --baudrate INTEGER Serial baudrate. Defaults to 1000000
-d, --dotbot-address TEXT Address in hex of the DotBot to control.
Defaults to FFFFFFFFFFFFFFFF
-g, --gw-address TEXT Gateway address in hex. Defaults to
0000000000000000
-s, --swarm-id TEXT Swarm ID in hex. Defaults to 0000
-w, --webbrowser Open a web browser automatically
-v, --verbose Run in verbose mode (all payloads received
are printed in terminal)
--log-level [debug|info|warning|error]
Logging level. Defaults to info
--log-output PATH Filename where logs are redirected
--handshake Perform a basic handshake with the gateway
board on startup
--use-mqtt Connect to the MQTT broker configured in the
.env file
--help Show this message and exit.
By default, the controller expects the serial port to be /dev/ttyACM0, as on
Linux, use the --port option to specify another one if it's different. For
example, on Windows, you'll need to check which COM port is connected to the
gateway and add --port COM3 if it's COM3.
Using the --webbrowser option, a tab will automatically open at
http://localhost:8000/dotbots. The page maintains
a list of available DotBots, allows to set which one is active and controllable
and provide a virtual joystick to control it or change the color of the on-board
RGB LED.
The DotBots firmware comes with a cheap indoor positioning system based on Valve Lighthouse 2.
To get the positioning to work and the DotBots to be tracked in real-time the system must be first calibrated by clicking the "Start calibration" or "Update calibration" button below the grid map and then by following the instructions there.
To run the tests, install tox and use it:
tox