Setting the Address of the node
The following assumes you are on a RasperryPi.
GIT clone https://github.com/manu-fwi/RR-duino project
git clone ttps://github.com/manu-fwi/RR-duino
NOTE: If you already downloaded it, you can run 'git pull' to make sure you have the latest.
Install picotui module for python.
sudo pip3 install picotui
- Add jumper between pin 2 and GND on Arduino
- Plugin USB of Arduino to USB port on RPi
- Find /dev port plugged into. Run 'dmsg' and look for a line like the following.
It might look like this.
[ 4024.148464] usb 1-1.1.3: Product: USB2.0-Serial
[ 4024.149673] ch341 1-1.1.3:1.0: ch341-uart converter detected
[ 4024.152451] usb 1-1.1.3: ch341-uart converter now attached to ttyUSB0
Or might look like this.
[ 256.206460] usb 1-1.3: Manufacturer: Arduino (www.arduino.cc)
[ 256.206468] usb 1-1.3: SerialNumber: 95730333238351305182
[ 256.207580] cdc_acm 1-1.3:1.0: ttyACM0: USB ACM device
Using the first examples, we'll assume it is on /dev/ttyUSB0
Change to the config tool directory
cd RR-duino/jmri-RR-duino
python3 ./pico-rr-duino-setup.py
Set the following:
- Set port to /dev/ttyUSB0 (or whatever shows in the previous step)
- Set port speed to 38400
- Tab to Connect button and press Enter.
- Tab to Address field, enter unique number for this node.
- Tab to 'Set address' button and press Enter
- Tab to 'Store to EEPROM' and press Enter
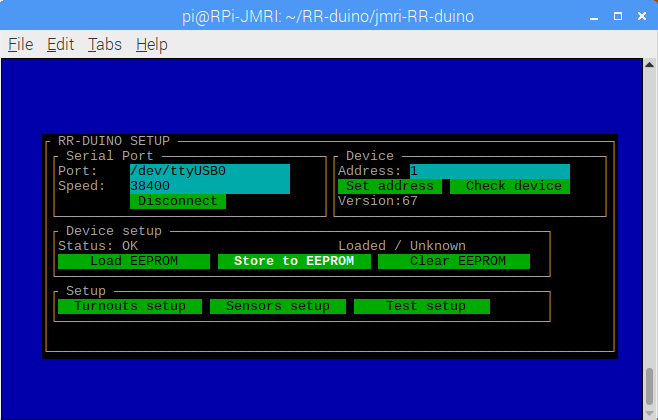
The address is now stored, you can disconnect and unground pin2.