Report can be found here
- Hardik Shah ([email protected])
- Deepak Ganesh ([email protected])
- Aniruddha Sundararajan ([email protected])
- Deepana Ishtaweera ([email protected])
Screencasts were recorded on,
ROG Zephyrus G15 GA503 GA503QM-HQ121R
OS: Ubuntu 22.04
CPU: 3.0 GHz AMD Ryzen 9 5900HS
RAM: 16 GB 3200MHz
Note: make sure you have miniconda3/ anaconda installed and working in the terminal
Note: first navigate into the folder
conda env create -f python_env/conda_config.yml
pip3 install -r python_env/requirements.txt
Use the following commands to download the benchmark datasets.
mkdir data && cd data
wget -O parking.zip https://rpg.ifi.uzh.ch/docs/teaching/2023/parking.zip
unzip parking.zip
wget -O kitti05.zip https://rpg.ifi.uzh.ch/docs/teaching/2023/kitti05.zip
unzip kitti05.zip
wget -O malaga.zip https://rpg.ifi.uzh.ch/docs/teaching/2023/malaga-urban-dataset-extract-07.zip
unzip malaga.zip
mv malaga-urban-dataset-extract-07 malaga
wget --load-cookies /tmp/cookies.txt "https://docs.google.com/uc?export=download&confirm=$(wget --quiet --save-cookies /tmp/cookies.txt --keep-session-cookies --no-check-certificate 'https://docs.google.com/uc?export=download&id=12IQMiJbkg5LW9epJfGxKL8U6VYO33fu7' -O- | sed -rn 's/.*confirm=([0-9A-Za-z_]+).*/\1\n/p')&id=12IQMiJbkg5LW9epJfGxKL8U6VYO33fu7" -O own.zip && rm -rf /tmp/cookies.txt
unzip own.zip
The data folder structure should be as follows.
├── data
│ ├── kitti
│ │ ├──05
│ │ │ ├── image_0
│ │ │ │ ├── ...
│ │ │ ├── image_1
│ │ │ │ ├── ...
│ │ │ ├── calib.txt
│ │ │ ├── times.txt
│ │ ├──poses
│ │ │ ├── ...
│ ├── malaga
│ │ ├── ...
│ ├── parking
│ │ ├──images
│ │ ├──K.txt
│ │ ├──poses.txt
│ ├── own
│ │ ├── ...
Usage of the vo_pipeline.py file
usage: vo_pipeline.py [-h] [--dataset_dir DATASET_DIR] [--dataset_name DATASET_NAME] [--config CONFIG]
Visual Odometry Pipeline
optional arguments:
-h, --help show this help message and exit
--dataset_dir DATASET_DIR
Path to the dataset directory
--dataset_name DATASET_NAME
Name of the dataset: can be kitti, malaga, parking or own
--config CONFIG Path to the config file: can be config/params.yaml, config/params_kitti.yaml, config/params_malaga.yaml,
config/params_parking.yaml or config/params_own.yaml
Use the following python commands to run the vo pipeline for different datasets. Make sure to navigate to the folder root before running the commands.
python3 vo_pipeline.py --dataset_name kitti --config config/kitti.yaml
python3 vo_pipeline.py --dataset_name parking --config config/parking.yaml
python3 vo_pipeline.py --dataset_name malaga --config config/malaga.yaml
python3 vo_pipeline.py --dataset_name own --config config/own.yaml
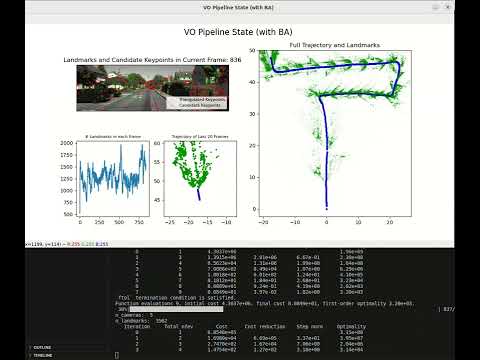
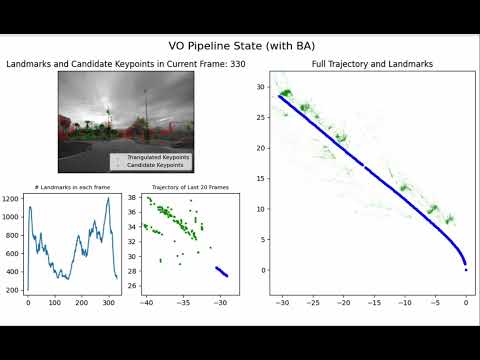
To activate Bundle Adjustment, change the use_ba flag to True in the configs.
To activate Bootstrapping when landmarks go below a threshold, change the use_bootstrap flag to True in the configs.
Note: Bootstrapping and Bundle Adjustment cannot be used together.
Note: the results are saved into a subfolder with the dataset name in the out/ folder
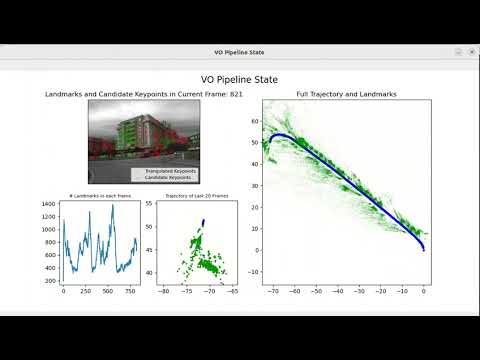
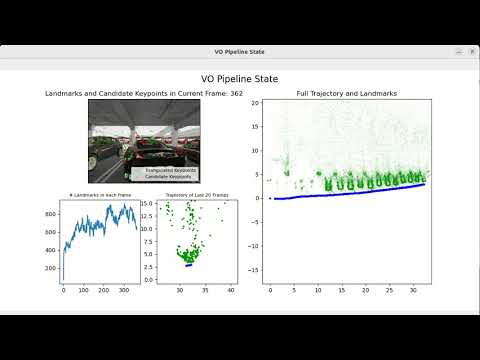
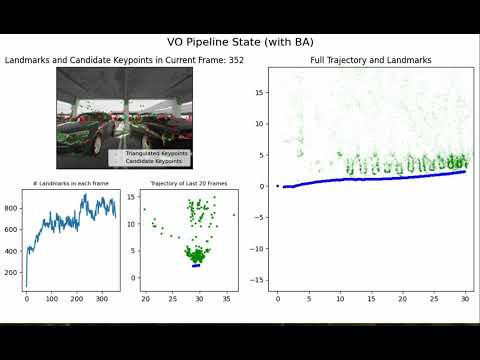
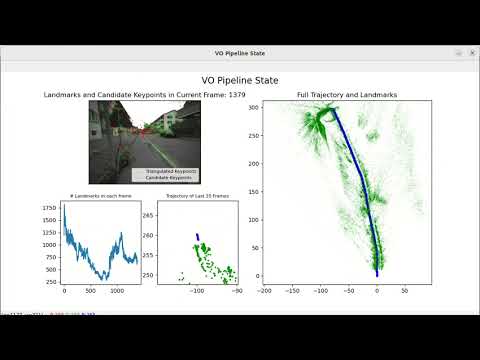
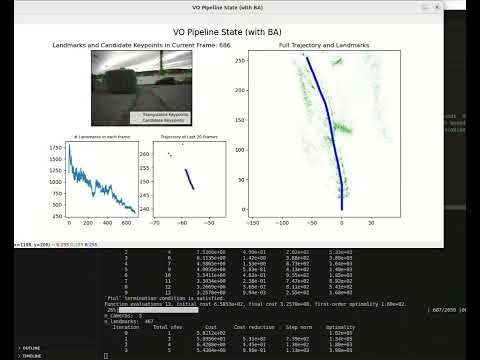
Here are the video demonstrations showcasing the monocular visual odometry pipeline. Our approaches have been evaluated using three widely recognized datasets: Parking, Kitti, Malaga, and an additional dataset that we generated ourselves. Visit the playlist on Youtube.