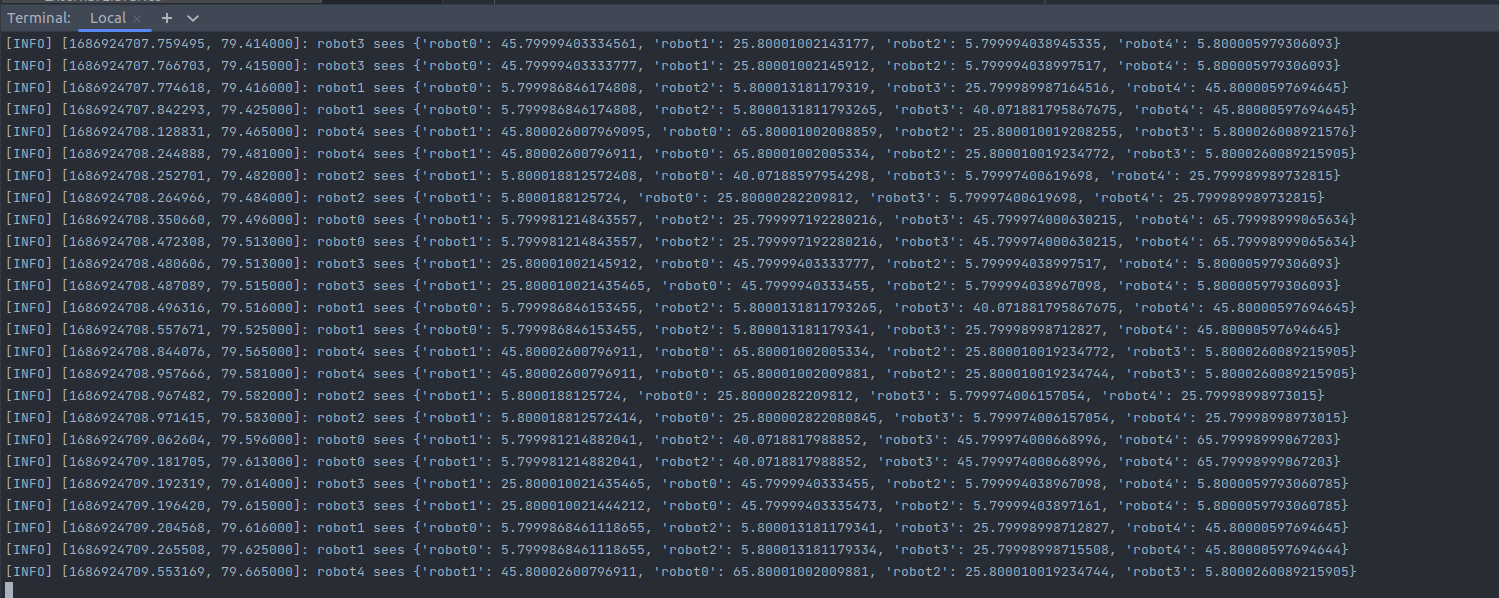
This package is to simulate the self-propelled rail vehicle V2V ranging functionalities based on Decawave DWM1001-DEV in ROS environment. For each vehicle (designated as robot{}), generated V2V ranging map is published as JSON into /robot{}/robot_dist topic.


The position of the individual UWB nodes is defined as the "Informative Position".
To define the informative positions of individual UWB nodes, change the joint_origin argument for each xacro:uwb_link in rail_vehicle_description/model.urdf.xacro.
Details can be found in Development and Testing of A UWB-based Vehicle-toVehicle (V2V) Ranging System for Self-Propelled Rail Vehicles on IEEE Transactions on Vehicular Technology
@article{wang2023development,
title={Development and Testing of a UWB-based Vehicle-to-Vehicle (V2V) Ranging System for Self-Propelled Rail Vehicles},
author={Wang, Zezhou and Spasojevic, Predrag and Schlake, Bryan W and Mulay, Ninad and Zaman, Asim F and Liu, Xiang},
journal={IEEE Transactions on Vehicular Technology},
year={2023},
publisher={IEEE}
}
lsb_release -a outputs:
Distributor ID: Ubuntu
Description: Ubuntu 20.04.6 LTS
Release: 20.04
Codename: focal
rosversion -d outputs:
noetic
gazebo --version outputs:
Gazebo multi-robot simulator, version 11.13.0
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org
git clone https://github.com/hegxiten/uwb_v2v_ros_sim.git to your catkin workspace src/ directory and execute catkin_make in the workspace root directory.
rospack depends1 uwb_v2v_ros_sim outputs:
roscpp
rospy
std_msgs
message_runtime
gazebo_ros
gazebo_plugins
gazebo_ros_control
turtlebot3_description
turtlebot3_gazebo
There are two ways to launch the simulation: 1. from the rosnode command line, 2. from the launch file.
-
Launching from the rosnode command line:
rosrun uwb_v2v_ros_sim main.pyThe simulation arguments (such as approach speeds) can be editted inside the
main.pyfile. Launching from the rosnode command line is useful for repeated testings configurable under themain.pyfile. -
Launching from the launch file:
roslaunch uwb_v2v_ros_sim multi_robot.launch 'robot_num:=2' 'robot_spacing:=20' 'movement_direction:=-1' 'speed:=0' 'kill_on_end:=0' 'max_range:=500'The simulation arguments (such as approach speeds) must be passed directly into the commands like above. Launching from the launch file is useful for one-time testing.
rostopic echo /robot{idx}/robot_dist can give you direct outputs for each vehicle (robot) identified by their index idx.
Currently, there is no custom message type defined. The message type is std_msgs/String and the message content is a JSON string. The JSON string can be parsed into a JSON object in Python.
The pack loss probability model is defined as a function of the distance between the two vehicles that can be modified in src/utils/utils.py
The stale threshold (in seconds) for networking can be modified in src/constants.py
When launched, you are expecting the following results:
In the interest of fostering an open and welcoming environment, we would like to clarify some terminology used within our codebase and documentation.
This project uses the conventional terms master and slave to denote primary and secondary UWB nodes respectively. These terms are employed due to their widespread use and understanding in the tech industry and in no way reflect our beliefs or attitudes towards historical events or peoples.
These terms are purely technical and do not carry any implications beyond their technical meanings.