This repo implements an Optimized Kalman Filter (OKF), which optimizes the parameters
Motivation: The KF parameters
Problem setup: A dataset of trajectories is required, with both observations and true system-states (learning from observations alone is currently not supported). The parameters
Installation: pip install Optimized-Kalman-Filter
Usage example: example.ipynb.
  |
|---|
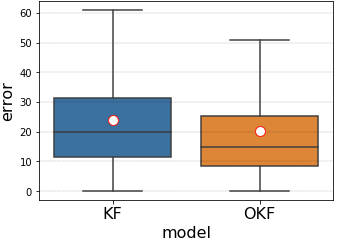
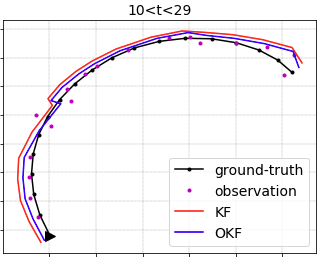
The standard KF (tuned by noise-estimation) vs. the Optimized KF, in the test data of the simple-lidar example problem: errors summary (left) and a sample of models predictions against the actual target (right) (images from example.ipynb) |
The Kalman Filter (KF) is a popular algorithm for filtering problems such as state estimation, smoothing, tracking and navigation. For example, consider tracking a plane using noisy measurements (observations) from a radar. Every time-step, we try to predict the motion of the plane, then receive a new measurement from the radar and update our belief accordingly.
 |
|---|
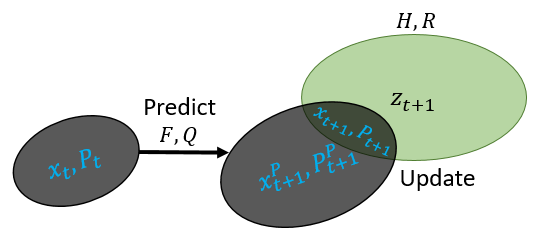
| An illustration of a single step of the Kalman Filter: predict the next state (black arrow); receive a new observation (green ellipse); update your belief about the state (mixing the two right ellipses) (image by Ido Greenberg) |
 |
|---|
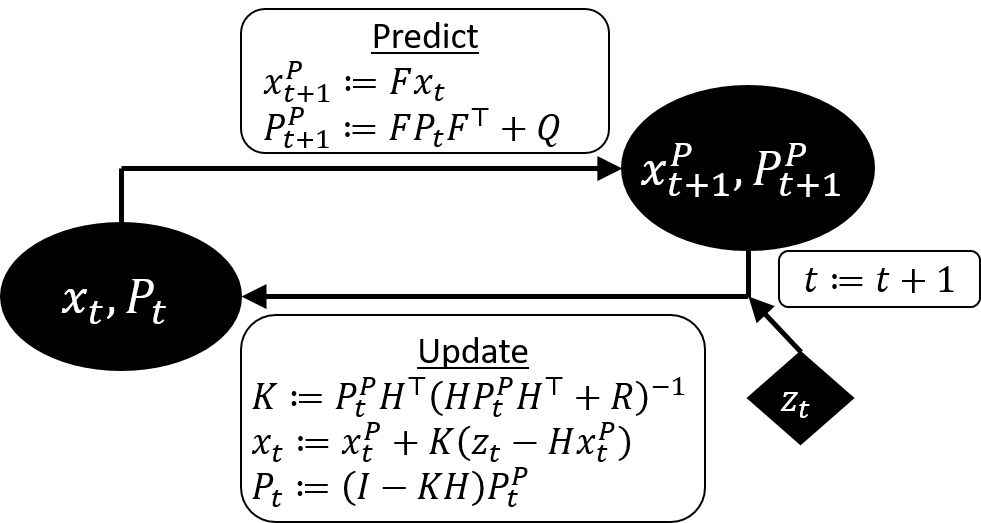
| A diagram of the Kalman Filter algorithm (image by Ido Greenberg) |
To tune the KF, one has to determine the parameters representing the measurement (observation) noise and the motion-prediction noise, expressed as covariance matrices R and Q. Given a dataset of measurements {z_t} (e.g. from the radar), tuning these parameters may be a difficult task, and has been studied for many decades. However, given data of both measurements {z_t} and true-states {x_t} (e.g. true plane locations), the parameters R,Q are usually estimated from the data as the sample covariance matrices of the noise.
When you want to build a Kalman Filter for your problem, and you have a training dataset with sequences of both states {x_t} and observations {z_t}.
Tuning the KF parameters through noise estimation (as explained above) yields optimal model predictions - under the KF assumptions. However, as shown in the paper, whenever the assumptions do not hold, optimization of the parameters may lead to more accurate predictions. Since most practical problems do not satisfy the assumptions, and since assumptions violations are often not noticed at all by the user, optimization of the parameters is a good practice whenever a corresponding dataset is available.
Installation: pip install Optimized-Kalman-Filter
Import: import okf
Usage example: example.ipynb.
The data consists of 2 lists of length n, where n is the number of trajectories in the data:
- X[i] = a numpy array of type double and shape (n_time_steps(trajectory i), state_dimension).
- Z[i] = a numpy array of type double and shape (n_time_steps(trajectory i), observation_dimension).
For example, if a state is 4-dimensional (e.g. (x,y,vx,vy)) and an observation is 2-dimensional (e.g. (x,y)), and the i'th trajectory has 30 time-steps, then X[i].shape is (30,4) and Z[i].shape is (30,2).
Below we assume that Xtrain, Ztrain, Xtest, Ztest correspond to train and test datasets of the format specified above.
The configuration of the KF has to be specified as a dict model_args containing the following entries:
dim_x: the number of entries in a statedim_z: the number of entries in an observationF: the dynamics model: a pytorch tensor of type double and shape (dim_x, dim_x)H: the observation model: a pytorch tensor of type double and shape (dim_z, dim_x); or a function that returns such a tensor given the estimated state and the current observationloss_fun: function(predicted_x, true_x) used as loss for training and evaluation- State initialization: initialize either explicitly via
x0(tensor of shape dim_x); or from the first observation via the functioninit_z2x
See an example here.
import okf
model = okf.OKF(**model_args) # set optimize=False for the standard KF baseline
okf.train(model, Ztrain, Xtrain)
loss = okf.test_model(model, Ztest, Xtest, loss_fun=model_args['loss_fun'])
See example.ipynb.
@article{greenberg2023okf,
title={Optimization or architecture: how to hack Kalman filtering},
author={Greenberg, Ido and Yannay, Netanel and Mannor, Shie},
journal={Advances in Neural Information Processing Systems},
year={2023}
}