This repository presents a method to obtain faster localization information in an Autolab, with help from the online localization system.
In the online localization system, images from watchtowers are already being analyzed to detect AprilTags. There are ground, traffic control and Autobot AprilTags. The tag information is then used by a graph optimizer to produce SLAM results. However, while the tag detection is fast (~0.25 seconds delay) and continuous, the optimization is slow (2-4 seconds delay) and usually lacking continuous position/orientation results. The optimization does produce a global and accurate localization, but is not real-time enough for operations like Autobot rescue.
This repository utilizes the fast AprilTag detection and the accuracy of the online localizaiton system, and produce faster localization information for Autobots. It does so by transforming the Autobots' Apriltag tranformation in watchtowers' frames, to the global frame.
Assuming the watchtowers are not moving, experiments show that a fixed offset is present, between the transform obtained by this system and the true world transform. Thus, an offset measurement step is required when this program starts. For watchtowers that completed this step, the measured offset is compensated. And the system produces reliable fast localization using watchtowers that are offset compensated.
In packages/localization/src directory, modify the file bot_tag_mapping by adding the (Autobot tag ID):(Autobot number) in the file. This files is responsible for mapping a recognized AprilTag to an Autobot, so make sure the demo Autobots are added.
dts devel build -f --arch amd64
Make sure online localization system is already running properly.
docker run --name localization --network=host -it --rm duckietown/simple-localization:v1-amd64
- NOTICE: Only offset measured watchtowers contribute to publishing fast localization results.
- Enter a dt-ros-commons container:
docker run -it --rm --net host duckietown/dt-ros-commons:daffy-amd64 /bin/bash- (Optional step) Tell the program which autobot is used for measurements by:
rosparam set /simple_localization/loc_node/offset_bot_id [AUTOBOT_ID]. Otherwise, it's autobot26 by default.
- (Optional step) Tell the program which autobot is used for measurements by:
- Enter measurement mode with:
rosparam set /simple_localization/loc_node/measuring_offset true - Choose the watchtower to do measurement for:
rosparam set /simple_localization/loc_node/offset_tower_id [WATCHTOWER_ID]- After above step, the watchtower in RVIZ appears as:

- After above step, the watchtower in RVIZ appears as:
- Place autobot near the watchtower that you want to do the measurement for, and move the bot a bit so the watchtower sees it. And then leave the bot still.
- Check the diff values printed from the program container are nearly zero, commit the measurement by either:
- Exiting measurement mode:
rosparam set /simple_localization/loc_node/measuring_offset false, or - switch to another watchtower for measurement:
rosparam set /simple_localization/loc_node/offset_tower_id [ANOTHER_WATCHTOWER_ID] - After commiting the measurement, the watchtower(s) that have been measured will appear like:

- Exiting measurement mode:
- Choose other watchtower(s) and repeat steps 3-5.
- For reference, watchtower numbers in ETHZ AMoD lab can be referred to here:
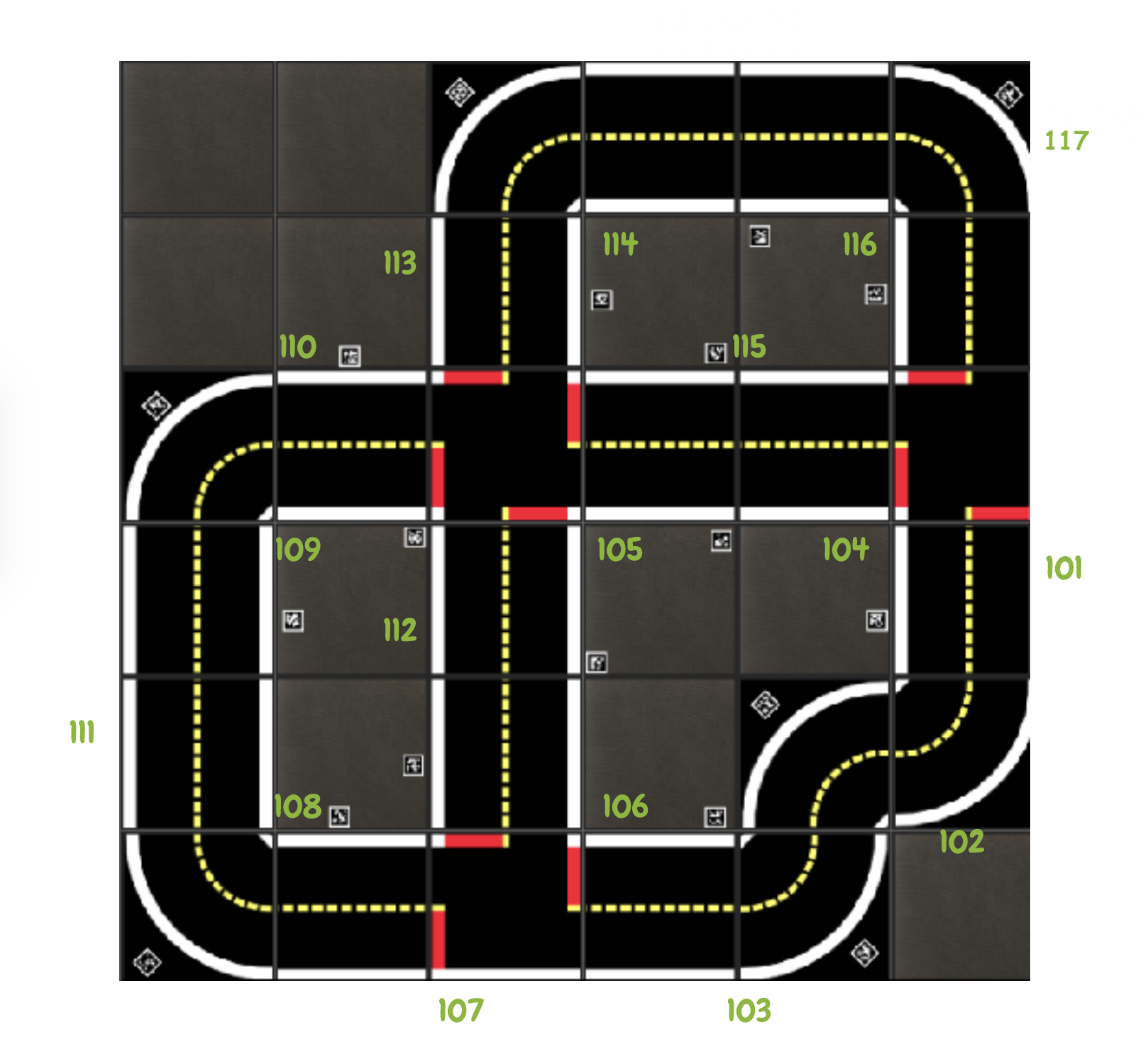
- For reference, watchtower numbers in ETHZ AMoD lab can be referred to here:
- Enter a dt-ros-commons container:
The following picture shows the inputs and outputs of the node.
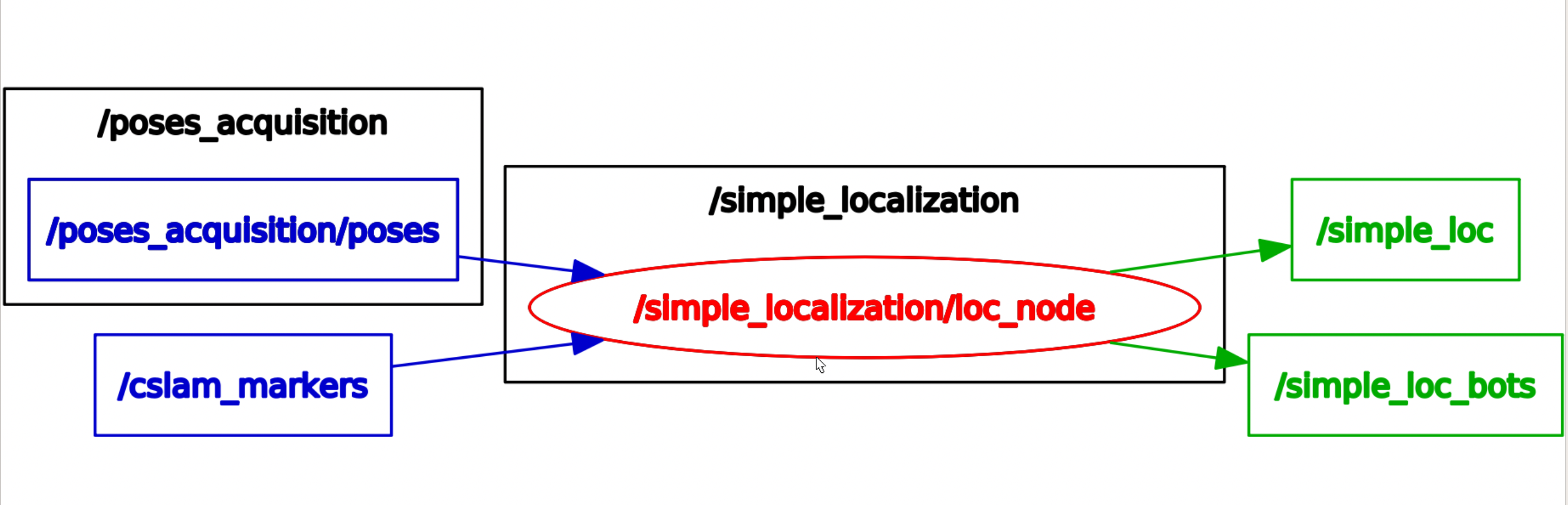
/simple_loctopic outputsvisualization_msgs.Markermessages- The markers are used for result verification
/simple_loc_botstopic outputsstd_msgs.Float64MultiArraymessages- The output is like following format
--- layout: dim: [] data_offset: 0 data: [26.0, 2.8390284122793625, 3.050242414056867, -50.08818199367434, 1576363992.0, 919081926.0] ---- data[0]: bot_tag_number
- data[1]: x
- data[2]: y
- data[3]: rotation angle
- data[4]: timestamp seconds
- data[5]: timestamp nanoseconds
In the rviz program started when setting up the online localization demo, add by topic, the /simple_loc Markers.