{kind=link}
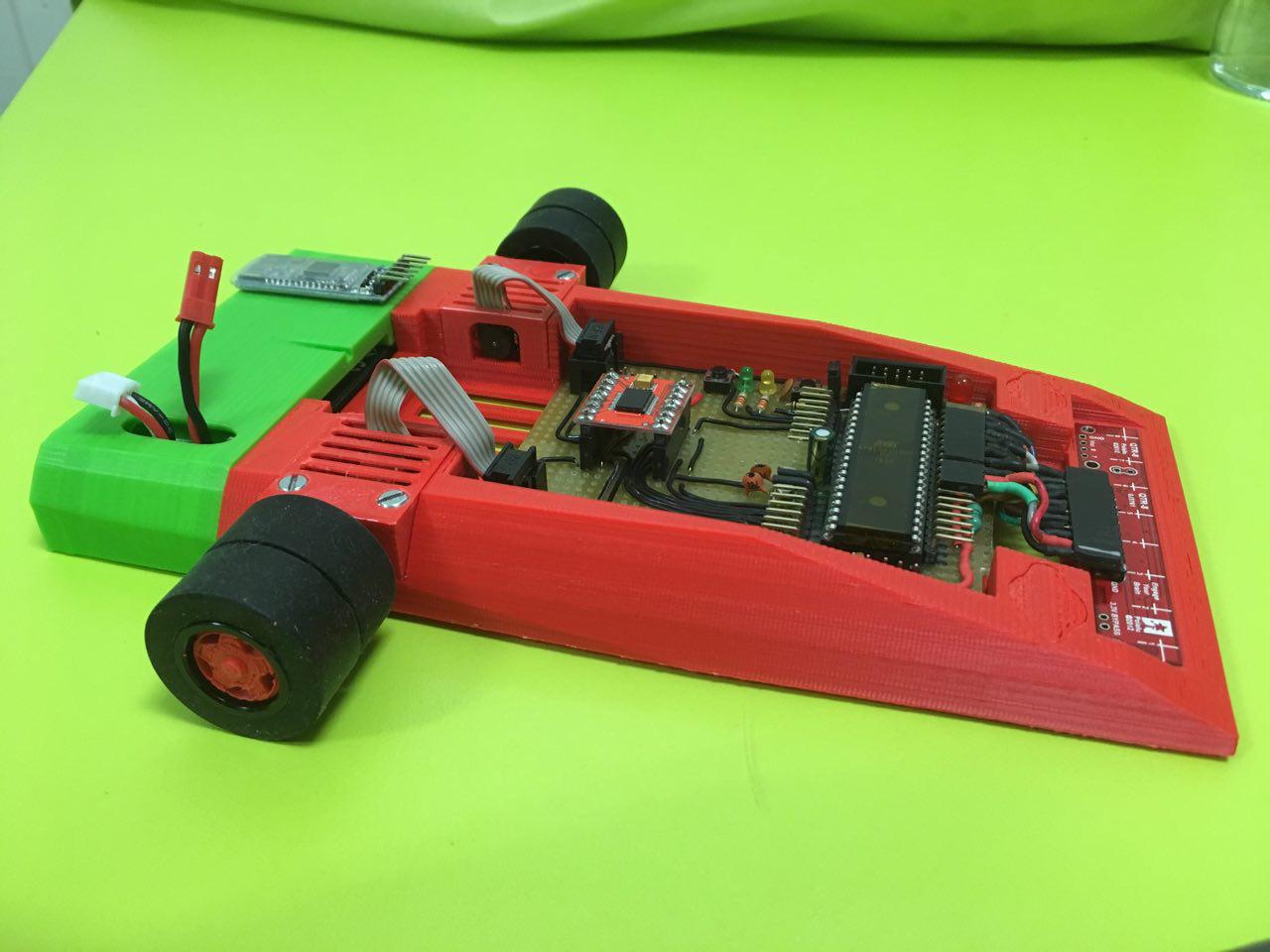
Line follower bot for the Line following contest at OSHWDem 2017
- Robot base: Custom 3D printed base. (will be released)
- Main Electronics: Custom made board with Atmega 1284P(Mightycore bootloader)
- Motors: 2x Pololu 10:1 HPCB 6V DUAL-SHAFT
- Motor Driver: TB6612FNG
- Sensors:
- Pololu Qtr8rc
- Comunications: HM-10 Bluetooth module.
- Pololu for the QTRSensors library and great documentation.
- SparkFun for the SparkFun_TB6612 library and great documentation.
- Arduino comunity for the platform, documentation and support.
- Hans (MCUdude) for the Mighty Core bootloader. (https://github.com/MCUdude)
- ThorLabs for the explanation of PID (https://www.thorlabs.com/tutorials.cfm?tabID=5dfca308-d07e-46c9-baa0-4defc5c40c3e)
- makespacemadrid.org fot the documentation about the HM-10 Module. (http://wiki.makespacemadrid.org/index.php?title=M%C3%B3dulo_HM-10)
- Anyone who create or share Open Source Hardware or Software.
Pololu QTRSensors library for Arduino, If you are using version 1.6.2 or later of the Arduino software, you can use the Library Manager to install this library. MIT License.
SparkFun SparkFun Motor Driver - Dual TB6612FNG (1A) Arduino Library, If you are using version 1.6.2 or later of the Arduino software, you can use the Library Manager to install this library. MIT License.
Default Arduino EEPROM V 2.0 Library. LGPL License.
Fully functional.
None at the moment.
- Read IR Sensors -> DONE
- Control motors -> DONE
- PID algorithm -> DONE
- EEPROM: format and save defaults-> DONE
- EEPROM: update parameters-> DONE
- EEPROM: retrieve parameters-> DONE
- Human interface: LEDs-> DONE
- Human interface: Button-> DONE
- Human interface: serial-> DONE