Home
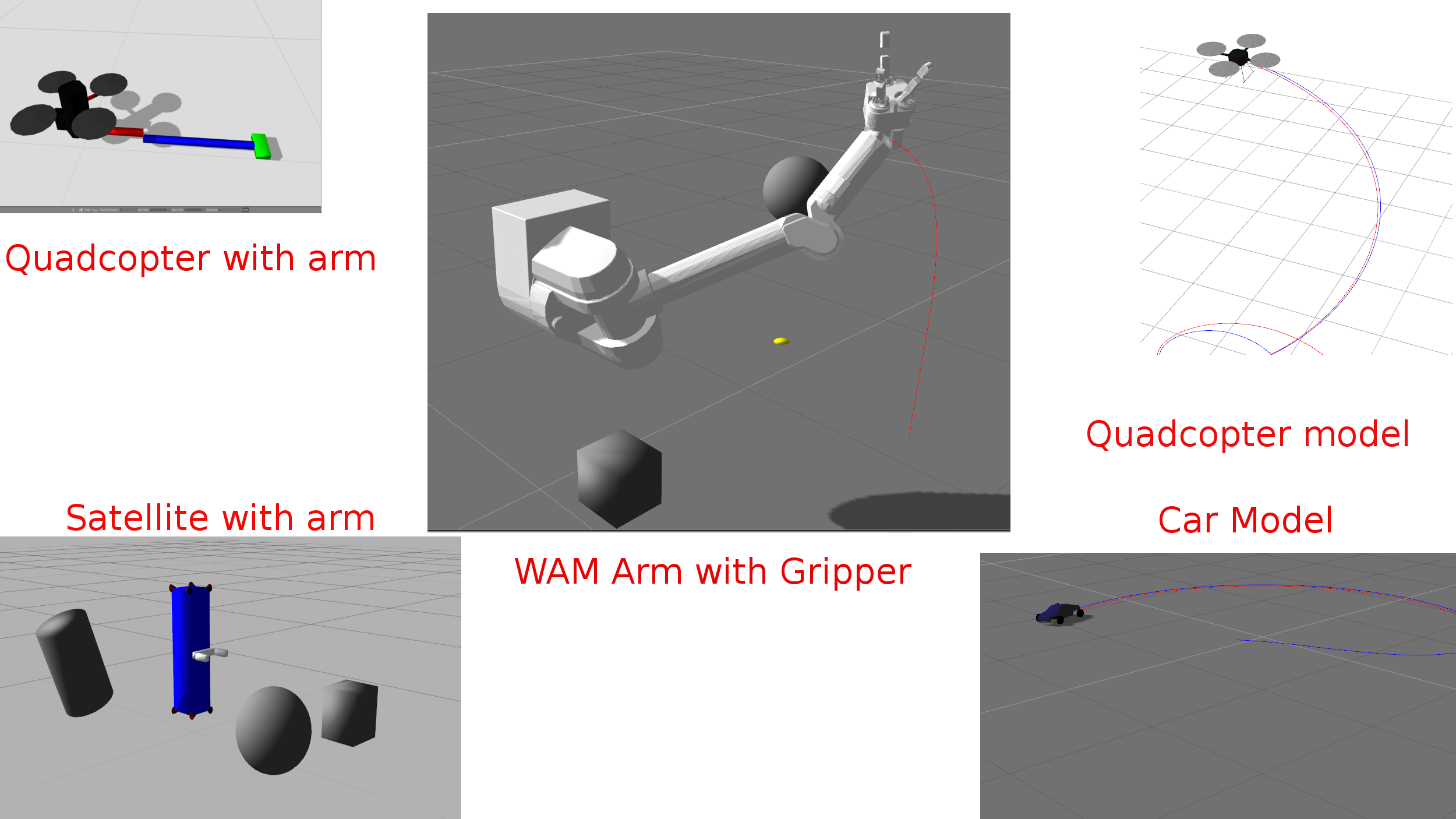
This package provides a gazebo plugin and a mex interface for fast communication between matlab and Gazebo. The mex interface provides fast access to link and joint states; easy application of link and joint efforts; way to set model and joint states. Various matlab examples have been provided in MATLAB
Prerequisite installations:
- ros-hydro/indigo
- Gazebo 1.9/2.x
- ros-hydro-gazebo-packages
Install hydro for ubuntu 12.04 and indigo for ubuntu 14.04.
Download PQP from here; Untar the file and run make in the folder. If you are running a 64 bit operating system you should add the following lines to the Makefile :
Add these lines after "CFLAGS = -O2 -I." in Makefile for x86_64 systems
CFLAGS += -fPIC
CPPFLAGS += -fPIC
Once compiled copy the files into your system using the following commands:
make
sudo cp -r include /usr/local/include/PQP
sudo cp lib/libPQP.a /usr/local/lib/libPQP.a
sudo ldconfig
For Hydro/Indigo installation follow instructions here/here; Choose the Desktop-Full Install (Recommended) version when installing ROS.
Then to setup a catkin workspace follow the instructions here. Once the environment is setup run the following command:
echo "source ~/catkin_ws/devel/setup.bash">>~/.bashrc
Once the environment is setup, install the prerequisites:
For hydro:
sudo apt-get install ros-hydro-gazebo-ros ros-hydro-gazebo-ros-pkgs
For Indigo:
sudo apt-get install ros-indigo-gazebo-ros ros-indigo-gazebo-ros-pkgs
Go into catkin workspace (~/catkin_ws for above instructions)/src folder:
cd ~/catkin_ws/src
Clone the package from git:
git clone https://git.lcsr.jhu.edu/ggarime1/gazebo_rosmatlab_bridge.git
Run the setup_script.bash with the arguments as MATLAB_ROOT(Directory where MATLAB is installed) and ROS_WORKSPACE(~/catkin_ws) if you have followed instructions above)
Example Usage:
source setup_script /usr/local/MATLAB/R2014a ~/catkin_ws
After installing the main components, if PQP is installed, you can run "source pqp_setup.bash" to setup collision checking module.
Lookup docs/documentation.pdf . Also Checkout Tutorials
Compile PQP with -fPIC under x86_64 systems since it produces static libraries