This package includes fastfood and dense transformation wrappers for pytorch modules, primarily to reproduce results from Li, Chunyuan, et al. "Measuring the intrinsic dimension of objective landscapes." arXiv preprint arXiv:1804.08838 (2018) - see below for info.
-
All contributions are welcome! Please raise an issue for a bug, feature or pull request!
-
Give this repo a star! ⭐
pip install intrinsic-dimensionality
import os
os.environ["CUDA_VISIBLE_DEVICES"] = DEVICE_NUM
import torch
from torch import nn
import torchvision.models as models
from intrinsic import FastFoodWrap
class Classifier(nn.Module):
def __init__(self, input_dim, n_classes):
super(Classifier, self).__init__()
self.fc = nn.Linear(input_dim, n_classes)
self.maxpool = nn.AdaptiveMaxPool2d(1)
def forward(self, x):
x = self.maxpool(x)
x = x.reshape(x.size(0), -1)
x = self.fc(x)
return x
def get_resnet(encoder_name, num_classes, pretrained=False):
assert encoder_name in ["resnet18", "resnet50"], "{} is a wrong encoder name!".format(encoder_name)
if encoder_name == "resnet18":
model = models.resnet18(pretrained=pretrained)
latent_dim = 512
else:
model = models.resnet50(pretrained=pretrained)
latent_dim = 2048
children = (list(model.children())[:-2] + [Classifier(latent_dim, num_classes)])
model = torch.nn.Sequential(*children)
return model
# Get model and wrap it in fastfood
model = get_resnet("resnet18", num_classes=YOUR_NUMBER_OF_CLASSES).cuda()
model = FastFoodWrap(model, intrinsic_dimension=100, device=DEVICE_NUM)Full thread about reproducibility results is available here. Note that some hyper-parameters were not listed in the paper - I raised issues on Uber's Github repo here.
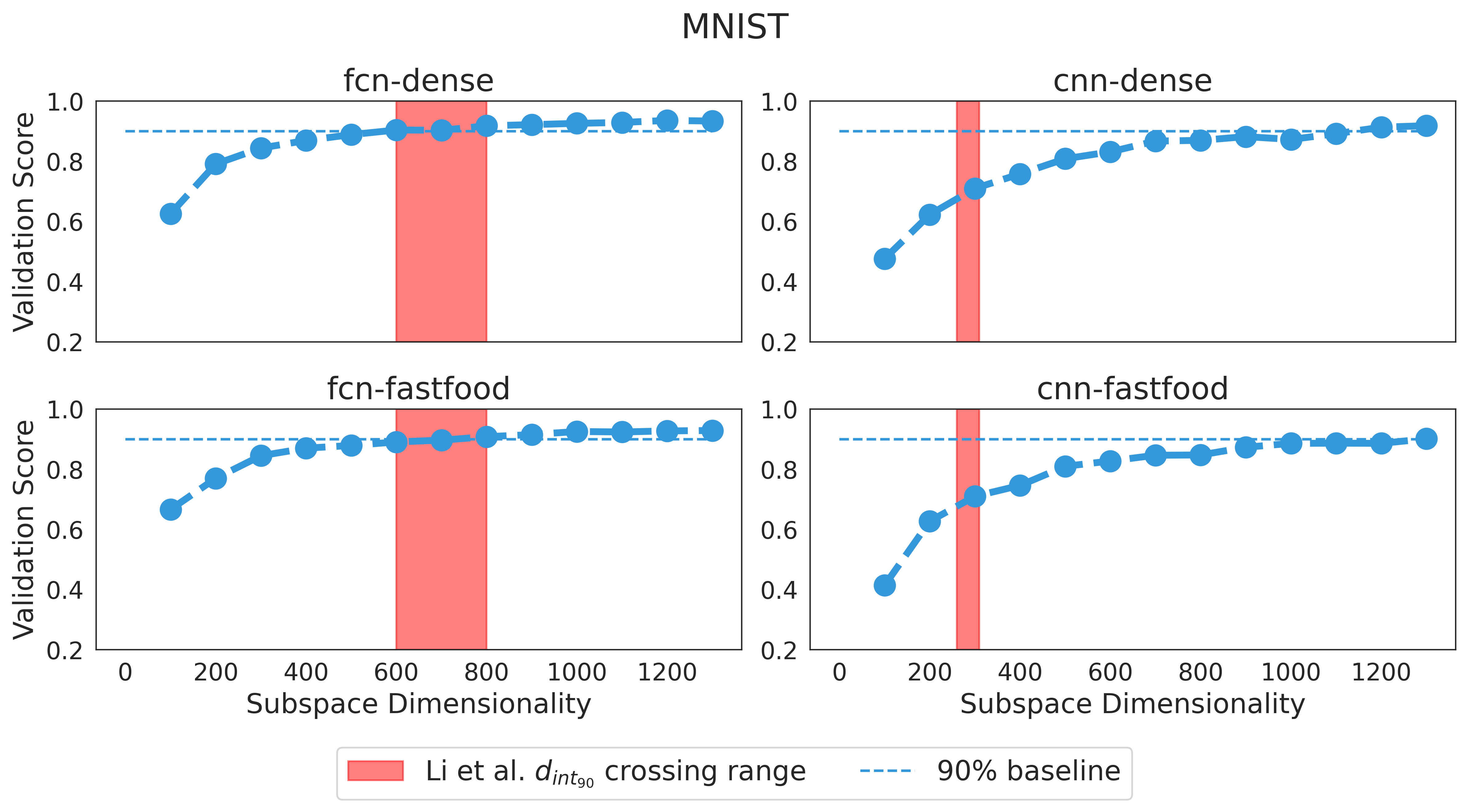
I am able to reproduce their MNIST results with LR=0.0003, batch size 32 for both dense and fastfood transformations using FCN (fcn-dense, fcn-fastfood). However, not for LeNet (cnn-dense, cnn-fastfood).
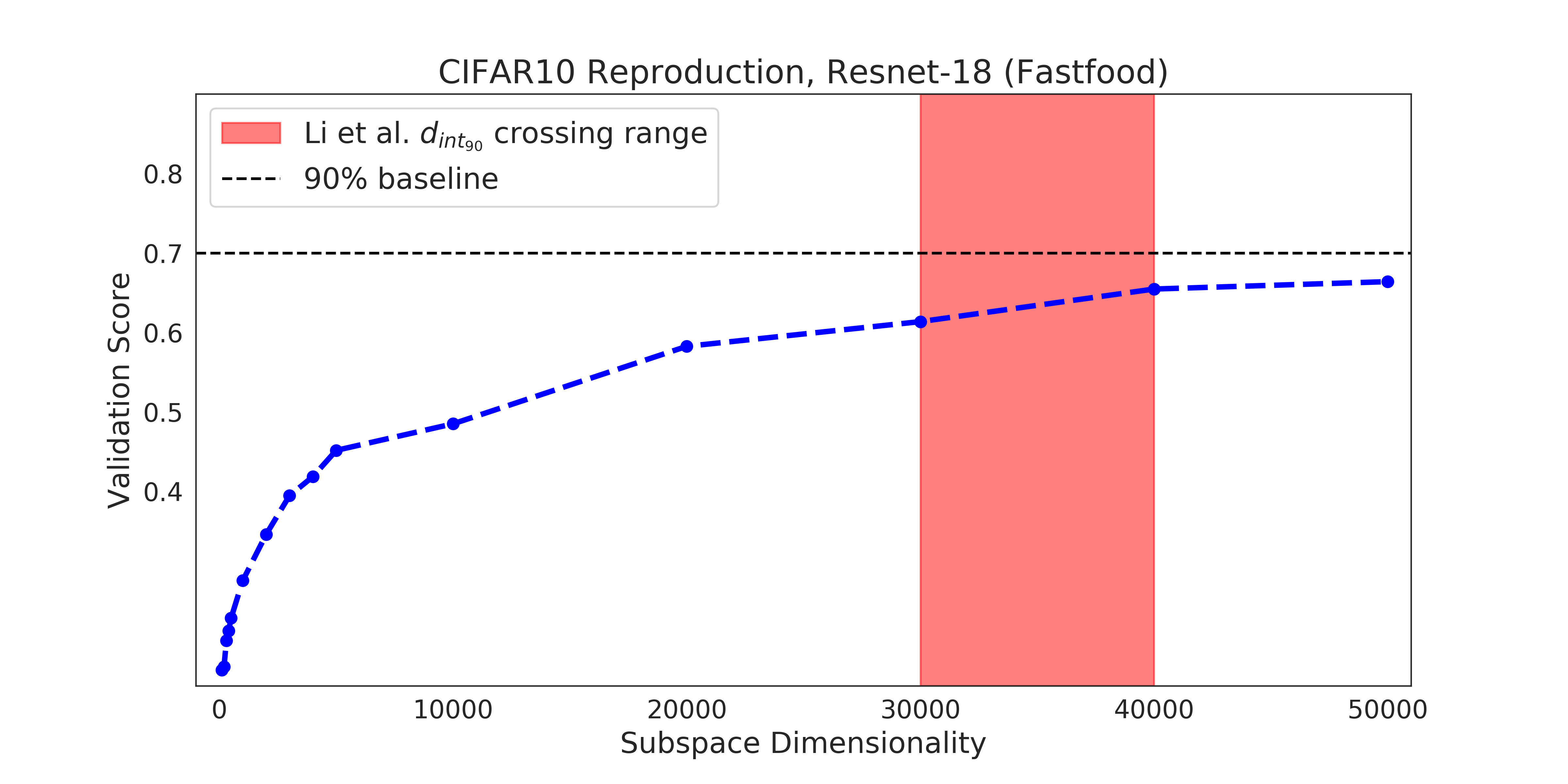
For CIFAR-10, with far larger resnet (Resnet-18 11mil param) vs 280k 20-layer resnet used in the paper, results appear to be similar. FCN results in appendix (Fig S7) suggest some variation is to be expected.
@misc{jgamper2020intrinsic,
title = "Intrinsic-dimensionality Pytorch",
author = "Gamper, Jevgenij",
year = "2020",
url = "https://github.com/jgamper/intrinsic-dimensionality"
}
@article{li2018measuring,
title={Measuring the intrinsic dimension of objective landscapes},
author={Li, Chunyuan and Farkhoor, Heerad and Liu, Rosanne and Yosinski, Jason},
journal={arXiv preprint arXiv:1804.08838},
year={2018}
}