TensorFlow implementation of ENet (https://arxiv.org/pdf/1606.02147.pdf) based on the official Torch implementation (https://github.com/e-lab/ENet-training) and the Keras implementation by PavlosMelissinos (https://github.com/PavlosMelissinos/enet-keras), trained on the Cityscapes dataset (https://www.cityscapes-dataset.com/).
-
Youtube video of results (https://youtu.be/HbPhvct5kvs):
-
-
The results in the video can obviously be improved, but because of limited computing resources (personally funded Azure VM) I did not perform any further hyperparameter tuning.

You might get the error "No gradient defined for operation 'MaxPoolWithArgmax_1' (op type: MaxPoolWithArgmax)". To fix this, I had to add the following code to the file /usr/local/lib/python2.7/dist-packages/tensorflow/python/ops/nn_grad.py:
@ops.RegisterGradient("MaxPoolWithArgmax")
def _MaxPoolGradWithArgmax(op, grad, unused_argmax_grad):
return gen_nn_ops._max_pool_grad_with_argmax(op.inputs[0], grad, op.outputs[1], op.get_attr("ksize"), op.get_attr("strides"), padding=op.get_attr("padding"))
preprocess_data.py:
- ASSUMES: that all Cityscapes training (validation) image directories have been placed in data_dir/cityscapes/leftImg8bit/train (data_dir/cityscapes/leftImg8bit/val) and that all corresponding ground truth directories have been placed in data_dir/cityscapes/gtFine/train (data_dir/cityscapes/gtFine/val).
- DOES: script for performing all necessary preprocessing of images and labels.
model.py:
- ASSUMES: that preprocess_data.py has already been run.
- DOES: contains the ENet_model class.
utilities.py:
- ASSUMES: -
- DOES: contains a number of functions used in different parts of the project.
train.py:
- ASSUMES: that preprocess_data.py has already been run.
- DOES: script for training the model.
run_on_sequence.py:
- ASSUMES: that preprocess_data.py has already been run.
- DOES: runs a model checkpoint (set in line 56) on all frames in a Cityscapes demo sequence directory (set in line 30) and creates a video of the result.
-
In the paper the authors suggest that you first pretrain the encoder to categorize downsampled regions of the input images, I did however train the entire network from scratch.
-
Batch size: 4.
-
For all other hyperparameters I used the same values as in the paper.
-
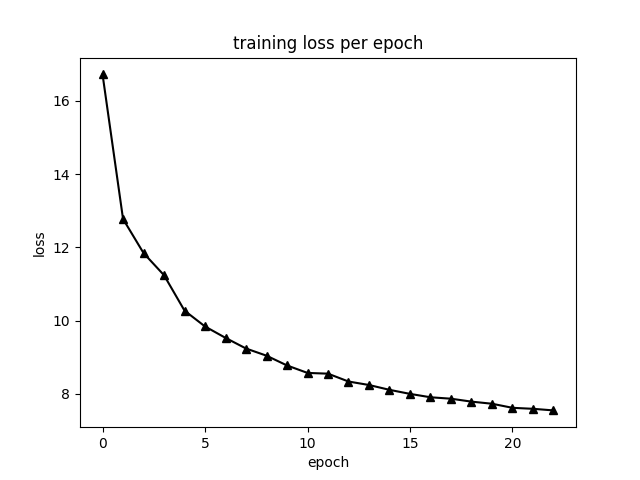
Training loss:
-
-
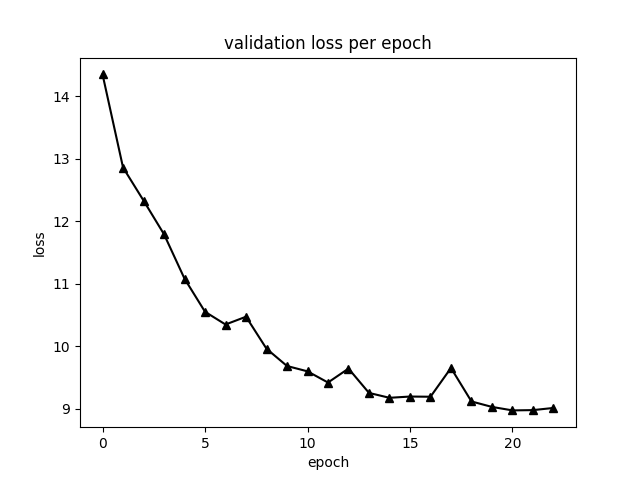
Validation loss:
-
-
The results in the video above was obtained with the model at epoch 23, for which a checkpoint is included in segmentation/training_logs/best_model in the repo.
To train the model, I used an NC6 virtual machine on Microsoft Azure. Below I have listed what I needed to do in order to get started, and some things I found useful. For reference, my username was 'fregu856':
-
Download Cityscapes.
-
Install docker-ce:
-
- $ curl -fsSL https://download.docker.com/linux/ubuntu/gpg | sudo apt-key add -
-
- $ sudo add-apt-repository "deb [arch=amd64] https://download.docker.com/linux/ubuntu $(lsb_release -cs) stable"
-
- $ sudo apt-get update
-
- $ sudo apt-get install -y docker-ce
-
Install CUDA drivers (see "Install CUDA drivers for NC VMs" in https://docs.microsoft.com/en-us/azure/virtual-machines/linux/n-series-driver-setup):
-
- $ CUDA_REPO_PKG=cuda-repo-ubuntu1604_8.0.61-1_amd64.deb
-
- $ wget -O /tmp/${CUDA_REPO_PKG} http://developer.download.nvidia.com/compute/cuda/repos/ubuntu1604/x86_64/${CUDA_REPO_PKG}
-
- $ sudo dpkg -i /tmp/${CUDA_REPO_PKG}
-
- $ rm -f /tmp/${CUDA_REPO_PKG}
-
- $ sudo apt-get update
-
- $ sudo apt-get install cuda-drivers
-
- Reboot the VM
-
Install nvidia-docker:
-
- $ sudo dpkg -i /tmp/nvidia-docker*.deb && rm /tmp/nvidia-docker*.deb
-
- $ sudo nvidia-docker run --rm nvidia/cuda nvidia-smi
-
Download the latest TensorFlow docker image with GPU support (tensorflow 1.3):
-
- $ sudo docker pull tensorflow/tensorflow:latest-gpu
-
Create start_docker_image.sh containing:
#!/bin/bash
# DEFAULT VALUES
GPUIDS="0"
NAME="fregu856_GPU"
NV_GPU="$GPUIDS" nvidia-docker run -it --rm \
-p 5584:5584 \
--name "$NAME""$GPUIDS" \
-v /home/fregu856:/root/ \
tensorflow/tensorflow:latest-gpu bash
-
/root/ will now be mapped to /home/fregu856 (i.e., $ cd -- takes you to the regular home folder).
-
To start the image:
-
- $ sudo sh start_docker_image.sh
-
To commit changes to the image:
-
- Open a new terminal window.
-
- $ sudo docker commit fregu856_GPU0 tensorflow/tensorflow:latest-gpu
-
To stop the image when it’s running:
-
- $ sudo docker stop fregu856_GPU0
-
To exit the image without killing running code:
-
- Ctrl-P + Q
-
To get back into a running image:
-
- $ sudo docker attach fregu856_GPU0
-
To open more than one terminal window at the same time:
-
- $ sudo docker exec -it fregu856_GPU0 bash
-
To install the needed software inside the docker image:
-
- $ apt-get update
-
- $ apt-get install nano
-
- $ apt-get install sudo
-
- $ apt-get install wget
-
- $ sudo apt-get install libopencv-dev python-opencv
-
- Commit changes to the image (otherwise, the installed packages will be removed at exit!)