Motion-Controller zur Ansteuerung von 3 Schrittmotoren für Foto-, Zeitraffer- und Videoanwendungen.
- Die Steuerung des Controllers erfolgt per MoCoBus-kompatiblen Protokoll. Damit werden neben der MDK Control App auch andere MoCoBus-kompatible Apps verwendet werden können. Hier denke ich insb. auch an qDDB mit der Motion-Control-Unterstützung, welche momentan entwickelt wird.
- Es gibt ein paar Erweiterungen gegenüber MoCoBus für die Astronachführung und die Panoramafunktion. Diese können nur mit der MDK Control App benutzt werden.
- Die Astronachführung funktioniert derzeit nur mit dem MDKv5, da die Geschwindigkeit genau auf die Getriebe-Untersetzung des MDKv5 abgestimmt ist. Um die notwendige extrem niedrige Geschwindigkeit erreichen zu können, ist die große Untersetzung von ca. 190:1 des MDKv5 erforderlich.
- Momentan ist der Zeitraffer SMS Modus und ein Videomodus umgesetzt (und natürlich Panorama und Astro). Es fehlen allerdings noch Rampen (Lead-in/out; Ramp-in/out). Diese kommen jedoch kurzfristig mit dem nächsten Firmware-Update.
- Es werden derzeit 2 Key-Frames (also Start und Ende) unterstützt. Da dies aber für manche Aufnahmen nicht ausreicht - wie ich selbst auch auf La Palma festgestellt habe -, ist geplant die Anzahl der Key-Frames auf min. 3 (besser noch mehr) zu erhöhen (sowohl für SMS als auch Video).
- Das Update erfolgt per USB, dazu muss der Controller mit dem rechten USB-Port des Controllers ("PROG") am PC angeschlossen werden. Eine weitere Spannungsversorgung per DC-Buchse ist dafür nicht notwendig.
- Falls der Controller von Windows nicht automatisch erkannt wird, werden die entsprechenden Treiber benötigt. Diese können hier heruntergeladen werden.
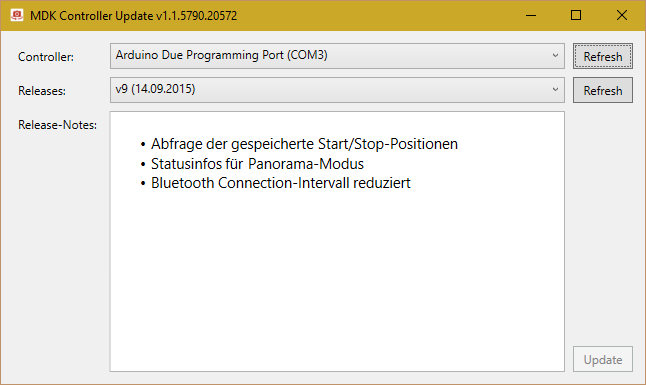
- Das eigentliche Update erfolgt mit Hilfe des Update-Tools. Die aktuellste Version kann hier heruntergeladen werden (MdkControllerUpdate.exe).
- Das Update-Tool benötigt eine aktive Internetverbindung, um die Firmware herunterladen zu können.
- Nach Auswahl des Controllers sowie des Firmware Releases, kann das eigentliche Update mit einem Klick auf "Update" durchgeführt werden.
- Als Basisboard wird zwar ein Arduino verwendet, es kommt jedoch der Arduino Due zum Einsatz. Es handelt sich dabei um einen ARM Cortex-M3 32-Bit Mikrocontroller von Atmel, der deutlich mehr Performance als ein Arduino Mega 2560 hat.
- Bedienung des Controllers per App via Bluetooth v4.0
- Ansteuerung von 3 Schrittmotoren. Theoretisch sind auch 4 Schrittmotoren möglich, in das Gehäuse passen derzeit jedoch nur 3 Buchsen für die Motoren. In der Regel sollten 3 Achsen für Slider, Pan und Tilt reichen.
- Die Schrittmotoren werden derzeit immer im 16-Mikroschritt-Betrieb angesteuert. Dies erlaubt einen sehr ruhigen und gleichmäßigen Lauf. Durch die gute Performance des Mikrocontrollers können trotzdem alle Motoren unabhängig voneinander mit verhältnismäßig hohen Geschwindigkeiten angesteuert werden.
- Die Schrittmotoren werden standardmäßig im sogenannten Stealth-Mode betrieben, der bei niedrigen bis mittleren Geschwindigkeiten nahezu lautlos ist. Hier hört man dann nur noch die Mechanik und die Getriebe, aber nicht mehr das typische Surren/Pfeifen der Schrittmotoren.
- Außerdem kommt ein intelligenter Stromsparmodus zum Einsatz. Bei Stillstand der Motoren wird der Motorstrom automatisch auf ca. 33% des Nennstroms abgesenkt. Dies reicht noch aus, um ein ausreichendes Haltemoment des Motors bei Stillstand zu erzeugen (insb. bei vertikalem Aufbau der Slider-Achse relevant), spart aber gegenüber einer dauerhaften Bestromung des Motors mit 100% deutlich Strom. Dies ist besonders bei mehrstündigen Zeitraffer-Aufnahmen mit langem Intervall etwa in der Nacht hilfreich.
- Anschluss einer Kamera über galvanisch getrennte 2,5mm Klinkenbuchse.
- Zwei weitere 2,5mm Klinkenbuchsen können für 4 Digital-Ein-/Ausgänge verwendet werden (derzeit noch nicht in der Firmware umgesetzt). Hier ist insb. ein Slave-Modus geplant.
- Versorgung des Controllers mit 12V über eine DC-Buchse. Die Schrittmotortreiber können jeweils max. einen Dauerstrom von 1,2A, derzeit ist der Slider-Motor auf 0,8A und die Pan/Tilt-Motoren auf 0,72A begrenzt.