
- Object Detection using Deep Learning Model (YOLOv5)
- Training YOLOv5 with custom dataset
- Object location coordinate transformation ( image > Work space )
- Arduino control using Object location
- we creating cutom dataset using roboflow

- Training YOLOv5-s model using colab
- YOLOv5 Github Link : https://github.com/ultralytics/yolov5
%cd /content !git clone https://github.com/ultralytics/yolov5.git !python train.py --img 416 --batch 16 --epochs 100 --data /content/dataset/data.yaml --cfg ./models/yolov5s.yaml --weights yolov5s.pt
- real-time object detection

[overview]

[Coordinate transformation]

To control robot arm, we need to coordinate (theta1, theta2)
So we converted object location coordinate(pixel) within the image to (theta1, theta2)

[Web cam to Real place]

| Web cam[px] | Real Value[cm] | Scale factor[px/cm] | |
|---|---|---|---|
| 1 | (245, 270) | (26.5, 20) | (0.1082, 0.0741) |
| 2 | (195, 345) | (21.5, 25) | (0.1102, 0.0724) |
| 3 | (297, 198) | (31.5, 15) | (0.1060, 0.0758) |
| 4 | (135, 198) | (16.5, 15) | (0.1222, 0.0758) |
So we get average scale factor (0.1116, 0.0745)
[ Real place to Polar]


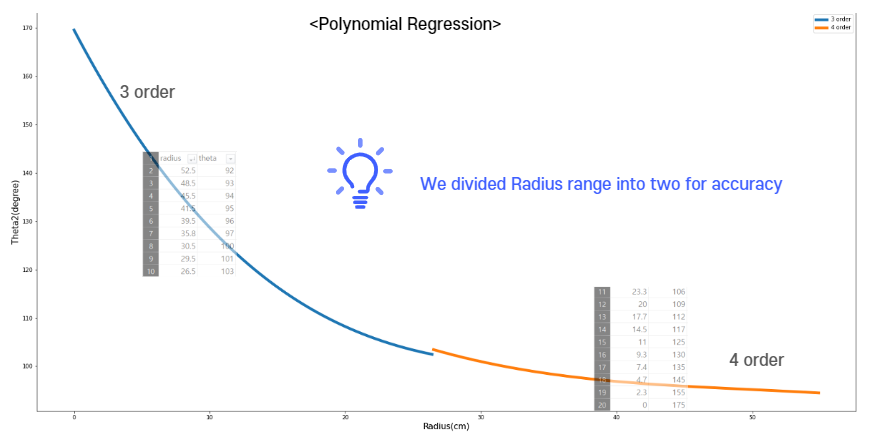
[Polar to Arduino]

| Radius(r) | Theta2(degree) | |
|---|---|---|
| 1 | 52.5 | 92 |
| 2 | 48.5 | 93 |
| 3 | 15.5 | 94 |
| 4 | 41.5 | 95 |
| 5 | 39.5 | 96 |
| 6 | 35.8 | 97 |
| 7 | 30.5 | 100 |
| 8 | 29.5 | 101 |
| 9 | 26.5 | 103 |
| 10 | 23.3 | 106 |
| 11 | 20.0 | 109 |
| 12 | 17.7 | 112 |
| 13 | 14.5 | 117 |
| 14 | 11.0 | 125 |
| 15 | 9.3 | 130 |
| 16 | 7.4 | 135 |
| 17 | 4.7 | 145 |
| 18 | 2.3 | 155 |
| 19 | 0.0 | 175 |
import numpy as np
# pixel to cm
real_x = (pixel_x) * 0.11165
real_y = (pixel_y) * 0.0745
# cartesian to polar
R = (real_x**2 + real_y**2)**0.5 - 6.5
theta1 = 115 - np.degrees(np.arctan(real_y/real_x))
# r to theta2 (Regression)
if R >= 26.5:
# 4 order polynomial regression
theta2 = (-0.0000001)*(R**4) - (0.0004)*(R**3) + (0.0611)*(R**2) -3.1901*(R) + 152.57
else:
# 3 order polynomial regression
theta2 = (-0.0012)*(R**3) + (0.1378)*(R**2) -5.3419*(R) + 169.53

