Running the Demo
Follow the instructions in the README.md to install the simulator.
This tutorial shows basic instructions on how to launch a simulation world, spawn vehicles into the environment, send commands to the vehicles, and retrieve sensor data from them.
-
Source the setup file if the simulator is built from source.
cd ~/mbzirc_ws source install/setup.bash
-
Launch simple demo world. The first time a world is launched, the simulator will download 3D models from the mbzirc collection on Fuel so make sure you have internet access. The downloaded resources are stored in a local cache directory:
<HOME>/.ignition/fuel/fuel.ignitionrobotics.org/openrobotics/modelsros2 launch mbzirc_ros competition_local.launch.py ign_args:="-v 4 -r simple_demo.sdf"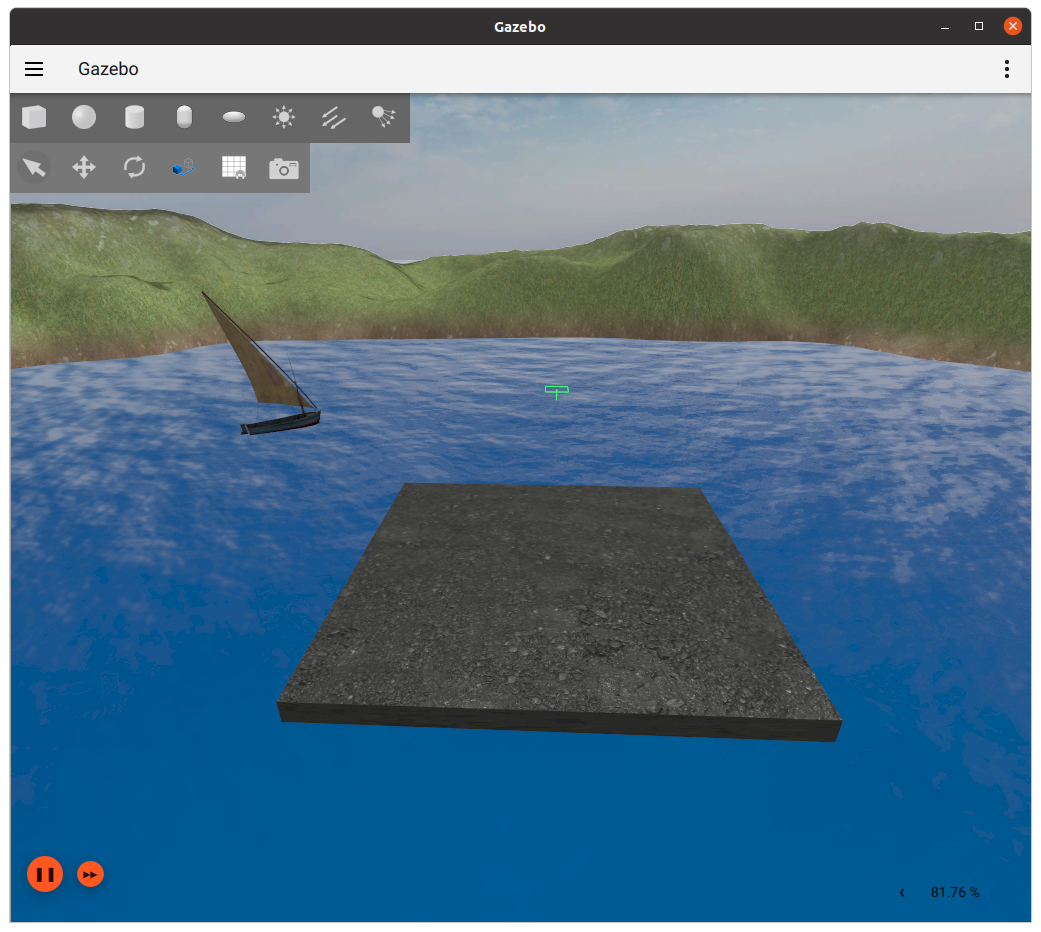
There are two multirotor UAVs available: A quadrotor and a hexrotor. You can launch the simulation and spawn these UAVs individually or you can let the simulator take care of spawning all the vehicles for you, see the Configure Platforms via YAML documentation. For the rest of this tutorial we will show how to spawn the vehicles individually via cmd line.
-
In a separate terminal, spawn a quadrotor UAV
# remember to source the setup.bash source install/setup.bash ros2 launch mbzirc_ign spawn.launch.py name:=quadrotor_1 world:=simple_demo model:=mbzirc_quadrotor type:=uav x:=1 y:=2 z:=1.05 R:=0 P:=0 Y:=0 slot0:=mbzirc_hd_camera slot1:=mbzirc_rgbd_camera
Note 1: The name of the vehicle, specified via the
namearg, must be unique and it can not contain characters other than alphanumericsNote 2: You will see some red error messages like the ones belwo. These are safe to ignore.
[ign gazebo-1] Error: Could not find the 'robot' element in the xml file [ign gazebo-1] at line 80 in /tmp/binarydeb/ros-galactic-urdfdom-2.3.5/urdf_parser/src/model.cpp [ign gazebo-1] Error [parser_urdf.cc:3227] Unable to call parseURDF on robot model [ign gazebo-1] Error [parser.cc:848] parse as old deprecated model file failed. [ign gazebo-1] [GUI] [Err] [Model.hh:73] Unable to unserialize sdf::Model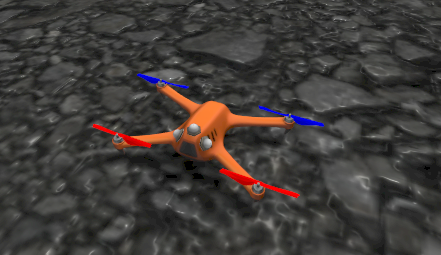
To spawn a hexrotor change the
model:=mbzirc_quadrotorargument tomodel:=mbzirc_hexrotorand be sure to give it a uniquename -
In another terminal, you can take a look at the ROS2 topics available
ros2 topic list
You will see the topics printed out in the console:
/clock /mbzirc/phase /mbzirc/run_clock /mbzirc/score /parameter_events /quadrotor_1/air_pressure /quadrotor_1/cmd_vel /quadrotor_1/imu/data /quadrotor_1/magnetic_field /quadrotor_1/mbzirc/target/stream/report /quadrotor_1/mbzirc/target/stream/start /quadrotor_1/output/camera_info /quadrotor_1/pose /quadrotor_1/pose_static /quadrotor_1/rx /quadrotor_1/slot0/camera_info /quadrotor_1/slot0/image_raw /quadrotor_1/slot0/optical/camera_info /quadrotor_1/slot0/optical/image_raw /quadrotor_1/slot1/camera_info /quadrotor_1/slot1/depth /quadrotor_1/slot1/image_raw /quadrotor_1/slot1/optical/camera_info /quadrotor_1/slot1/optical/depth /quadrotor_1/slot1/optical/image_raw /quadrotor_1/slot1/points /quadrotor_1/tx /rosout /tf /tf_static -
Make sure data are published, e.g. try echoing the IMU topic
ros2 topic echo /quadrotor_1/imu/dataHere is a sample output of the IMU data:
--- header: stamp: sec: 201 nanosec: 260000000 frame_id: quadrotor_1/base_link/imu_sensor orientation: x: 1.4501223094714753e-16 y: -2.7930139195879006e-11 z: -1.3878542264038845e-17 w: 1.0 orientation_covariance: - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 angular_velocity: x: -0.00825 y: 0.01225 z: -0.0025 angular_velocity_covariance: - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 linear_acceleration: x: 0.05 y: 0.015 z: 9.75 linear_acceleration_covariance: - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 - 0.0 --- -
Launch
rqt_image_viewto see the front (slot 0) camera stream from the UAVros2 run rqt_image_view rqt_image_view
Select the
/quadrotor_1/slot0/image_rawtopic from the drop down list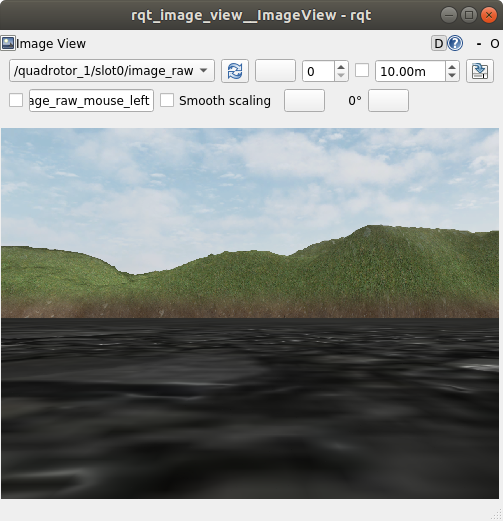
-
Launch
rviztoo see point cloud data from the rear (slot 1) RGBD cameraros2 run rviz2 rviz2
Set
Fixed Framein the left panel to/quadrotor_1/base_linkClick on
Addbutton below the left panel, select theBy topictab and choose the/quadrotor_1/slot1/points>PointCloud2topic to see colored point clouds in the 3D view.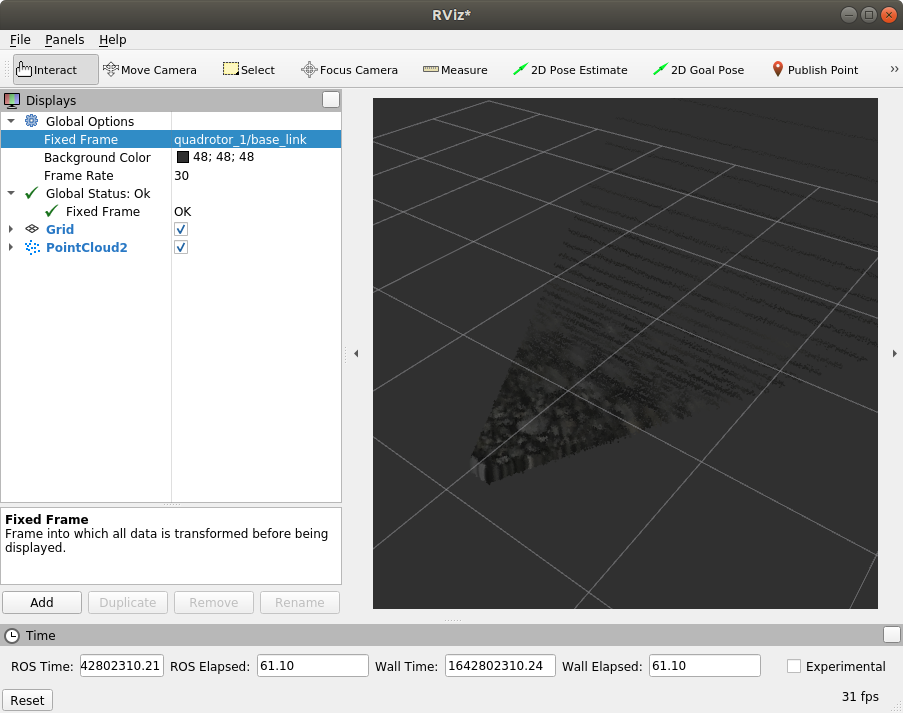
-
Publish a twist command with linear +z velocity to make the UAV take off
ros2 topic pub --once /quadrotor_1/cmd_vel geometry_msgs/msg/Twist '{linear: {x: 0.0,y: 0.0, z: 0.5}, angular: {x: 0.0, y: 0.0, z: 0.0}}' -
Publish zero velocity twist command to make the UAV hover in the air
ros2 topic pub --once /quadrotor_1/cmd_vel geometry_msgs/msg/Twist '{linear: {x: 0.0,y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.0}}' -
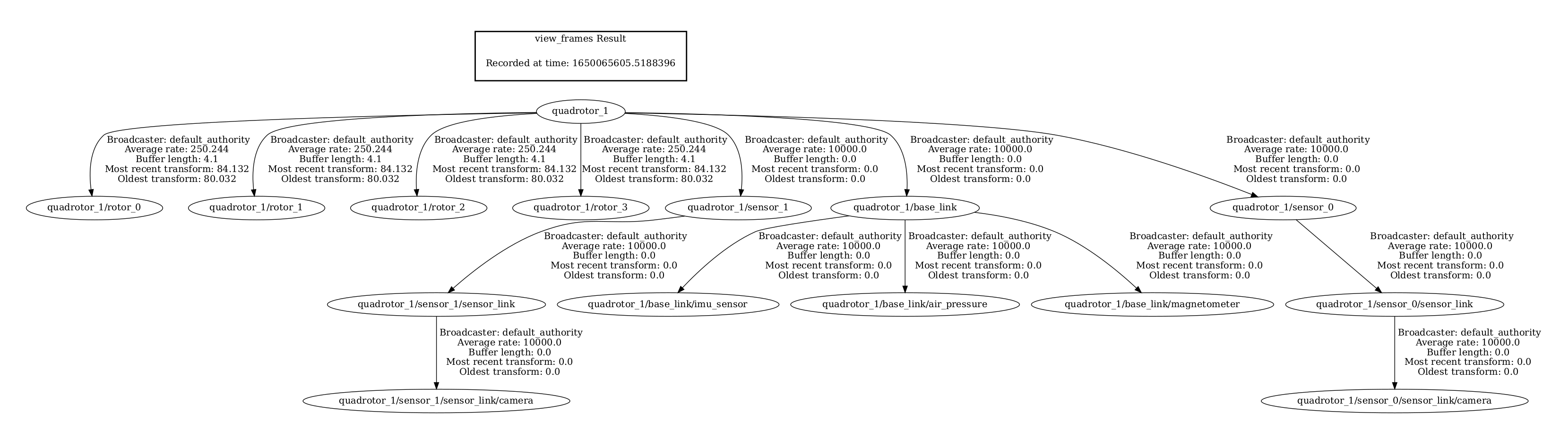
View the TF tree
# this generates frames.pdf ros2 run tf2_tools view_frames # view the TF tree using your favorite PDF viewer, e.g. evince frames.pdf
-
In a separate terminal, spawn a USV
# remember to source the setup.bash source install/setup.bash ros2 launch mbzirc_ign spawn.launch.py name:=usv world:=simple_demo model:=usv type:=usv x:=15 y:=0 z:=0.3 R:=0 P:=0 Y:=0
-
To move the propeller
ros2 topic pub --once /usv/left/thrust/cmd_thrust std_msgs/msg/Float64 'data: 15' ros2 topic pub --once /usv/right/thrust/cmd_thrust std_msgs/msg/Float64 'data: 15'
-
To rotate the thruster
ros2 topic pub --once /usv/left/thrust/joint/cmd_pos std_msgs/msg/Float64 'data: -1' ros2 topic pub --once /usv/right/thrust/joint/cmd_pos std_msgs/msg/Float64 'data: 1'