Code and Data for Paper "Learning to Navigate Unseen Environments: Back Translation with Environmental Dropout"
Please move to our new code base under CLIP-ViL: https://github.com/clip-vil/CLIP-ViL/tree/master/CLIP-ViL-VLN. The code logical is the same but the results are much higher with CLIP features (+6% success rate on R2R). We also provide the RxR training script there.
The original results of 52% on val-unseen are produced with a specific version of PyTorch 0.4.x (see issue). We are aware of that the results are stablely lower than 52% (around 51%) with PyTorch 0.8~1.2.
With PyTorch 1.7.1 and exactly the same code/script in this Github, the results magically, supersingly, and unreasonablely reach back to 53.5% in accuracy. Here is the full log:
val_unseen Iter 139100 ,
train , nav_error: 0.681, oracle_error: 0.490, steps: 25.227, lengths: 10.059, success_rate: 0.936, oracle_rate: 0.959, spl: 0.918,
val_seen , nav_error: 3.804, oracle_error: 2.414, steps: 27.729, lengths: 10.897, success_rate: 0.655, oracle_rate: 0.735, spl: 0.624,
val_unseen , nav_error: 5.067, oracle_error: 3.324, steps: 32.378, lengths: 12.098, success_rate: 0.535, oracle_rate: 0.607, spl: 0.488
These results conclude the two-year question that PyTorch version might have a largely influence, and the answer is True. I would like to share this information to you so everyone could keep an eye on the PyTorch version.
Download Room-to-Room navigation data:
bash ./tasks/R2R/data/download.sh
Download image features for environments:
mkdir img_features
wget https://www.dropbox.com/s/o57kxh2mn5rkx4o/ResNet-152-imagenet.zip -P img_features/
cd img_features
unzip ResNet-152-imagenet.zip
Python requirements: Need python3.6 (python 3.5 should be OK since I removed the allennlp dependencies)
pip install -r python_requirements.txt
Install Matterport3D simulators:
git submodule update --init --recursive
sudo apt-get install libjsoncpp-dev libepoxy-dev libglm-dev libosmesa6 libosmesa6-dev libglew-dev
mkdir build && cd build
cmake -DEGL_RENDERING=ON ..
make -j8
bash run/speaker.bash 0
0 is the id of GPU. It will train the speaker and save the snapshot under snap/speaker/
bash run/agent.bash 0
0 is the id of GPU. It will train the agent and save the snapshot under snap/agent/. Unseen success rate would be around 46%.
After pre-training the speaker and the agnet,
bash run/bt_envdrop.bash 0
0 is the id of GPU. It will load the pre-trained agent and run back translation with environmental dropout.
Currently, the result with PyTorch 1.1 is a little bit lower than my NAACL reported number. It still easily reaches a success rate of 50% (+4% from w/o back translation).
- When training the speaker and listener, we drop out features as much as we can. It means that the image feature are dropped randomly (with a smaller dropout rate), which has been seen used in multiple vision papers.
- The ml_weight is increased in using back translation, since the quality of generated sentence is not high and RL would be misled.
- Instead of training with augmented data and fine-tuning with training data, we trained them together.
As shown in Fig.6 of our paper which is the same to
semantic_views/17DRP5sb8fy/10c252c90fa24ef3b698c6f54d984c5c/14.png
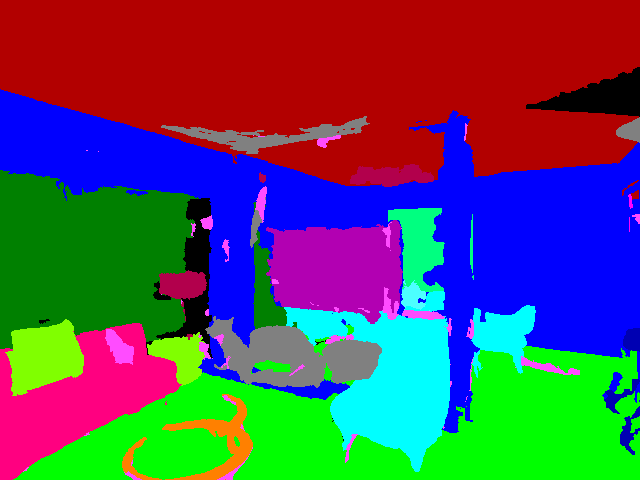

in this repo, we rendered semantic views from Matterport3D dataset. We provide a preview of semantic views and rgb views under the forder semantic_views.
To access the full rendered data, please first sign the Terms of Use agreement form in https://github.com/niessner/Matterport and cc' the email to us [email protected]. And we would share a download link.
Thanks to the one who teaches me how to calibrate camera. Note that there would be a small pixel-level disagreement between the RGB view and semantic view, since the semantic view are rendered from 3D annotations while the RGB view are rendered from skyboxes. We are still aiming in solving it.
- Provide test script for beam search. (Code is in
train.pyandagent.py) - Release pre-trained snapshots.
- Check PyTorch 1.1 configurations.
- Update pip requirement with version specifications.