PRGHusky
Notes about Husky dog
PRGHusky comes in the following configurations (Click on the name for hardware and software setup).| Config | Autopilot Software |
|---|---|
| PRGHuskyAlpha | Ardupilot |
| PRGHuskyGamma | Parrot Bebop 2 |
PRGHuskyAlpha is a 240-360 size standard quadrotor built from scratch using the Ardupilot based flight controllers.
PRGHuskyGamma is a modified Bebop 2 quadrotor mated to a down-facing stereo camera with an IMU, a front facing monocular camera and an Intel Up computing board. It was originally designed for use in ENAE 788M: Hands-on autonomous aerial robotics course at University of Maryland, College Park.
| Item | Qty | Cost (USD) | Sourcing Link(s) |
|---|---|---|---|
| Parrot Bebop 2 Refurbished | 1 | 220 | Link |
| Tara Stereo Camera | 1 | 299 | Link |
| Leopard Imaging Mono Camera | 1 | 229 | Link |
| Intel Up Board | 1 | 159 | Link |
| Carbon Fiber | 1 | 30 | Link |
| Pololu 5V 5A regulator | 1 | 15 | Link |
| WiFi Dongle | 1 | 14 | Link |
| USB Cables | 2 | 8 | Link |
| Bolts, Nuts and Standoffs | - | 25 | Link1, Link2, Link3, Link4 |
| Item | Qty |
|---|---|
| 6 mm M2 Bolts | 4 |
| 12 mm M2 Bolts | 4 |
| 16 mm M2 Bolts | 8 |
| 20 mm M2 Bolts | 4 |
| M2 Nuts | 36 |
| 6 mm Nylon M3 F-F Standoff | 4 |
| 12 mm M3 Bolts | 8 |
| 20 mm Nylon M3 M-F Standoff | 12 |
| M3 Nuts | 4 |
- M2 and M3 Allen keys
- T5 Screwdriver
- Electrical Tape
- Kapton High Heat Insulation Tape
- Hot Glue Gun with sticks
- Soldering Iron with Solder
- 22 AWG Wire
- Liquid Electrical Tape
For University of Maryland, College Park students use Terrapin Works service and submit jobs through Papercut server. Others can use an online service such as this and this or use your own 3D printer/water-jet cutter.
Note that doing this to your Bebop 2 will void all it's warranty!
- Gather all your tools and the Parrot Bebop 2.

- Remove the battery.

- Remove the screws holding the nose cone.

- Pop the nose cone out. Be gentle as the nose cone houses the GPS and IMU assembly which is quite sensitive.

- Remove the screws holding the GPS assembly in place and bend the assembly over. Again be very very gently.

The ribbon cable shown below is very very sensitive and hard to source. The bebop won't arm if this cable is damaged or broken.

- Remove the screws shown, remove the clip holding the camera cable in place (like a LEGO) and finally remove the camera.

Now, you should have the camera module separated from the Bebop 2 (we won't use this).

- Re-mount the GPS unit by putting back the screws we removed in the last step. (Don't forget to put the screws which hold the metal bracket to the base before mounting the GPS unit).

- Remove the screws shown on all four legs.

Remove the landing legs of rear motors first.

The front legs house the WiFi antenna, be gentle and slide the antenna out. Then remove the landing legs.

- Remove the screws which hold the molex connector in place, then pull the molex connector out and bend the molex connector out.

- Remove the motor mounting screws as shown below.

- Once all the motors have been removed, you'll have two motors labelled A (anti-clockwise) and two labelled C (clock-wise).

- Now remove the bottom bushings by unscrewing the four black disk like screws shown below.

- Don't worry if the whole thread is out. Just remove the black disk part and re-screw the thread back in.

- Disconnect the WiFi anetenna like a LEGO from it's wire. The terminal on the end of the cable is sensitive so be gentle.

- Now, you should have the Bebop motorboard free of all the compomnents we don't need.

- Pop the bushings out. We'll need these soon.

- Assuming that you've downloaded these CAD files and got them water cut following the instructions given here, let's proceed to the next step. Assemble the PRG Husky frame. You'll need a 12 mm M3 screw, 3 x 20 mm M3 M-F Nylon stand offs per arm.

The assembled frame should look like this (place the arms on top, the side where stand offs will be used):

- Insert the bushings into the big holes in the Husky frame and screw the Bebop motherboard to the Husky frame. Note that the holes closer to the edge indicate the rear side.

- Mount the bebop 2 motors onto the Husky. Note that the orientation of motors is the same as that of the bebop 2 which is opposite of the convention. When looking from the top (not shown in image) top right and bottom left motors are clockwise and vice-versa. You'll need 3 x 6 mm M2 screws and 3 x 2 nuts for each motor. Feel free to use a 4 mm M2 screw if you have one (you won't need the scews in this case). Also, note that when you connect the motor cables back, the back side motors are criss crossed in connection, i.e., right side connection goes to the left side motor and so on. However, the front side motots are direct, i.e., right side connection goes to the right side motor.

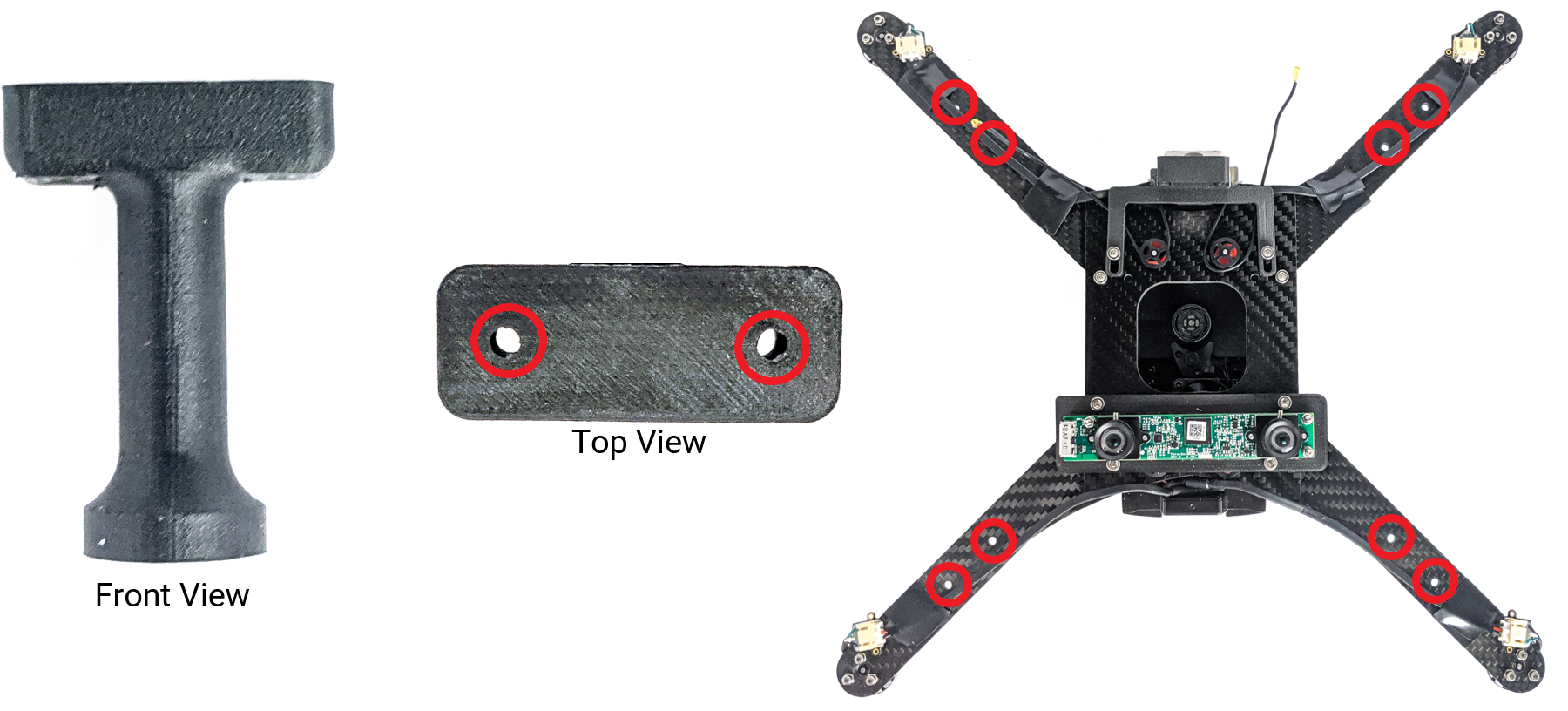
- Now, let's mount the mono camera to the base. Download this CAD file and get it 3D printed in any material of your liking, we suggest ONYX. You'll need 2 x 16 mm M3 screws and 2 M3 nuts.

Once the camera is mounted, it should look something like this:

- Now, let's mount the stereo camera. Start by removing the Tara stereo camera from it's base. Note that THIS WILL VOID YOUR TARA'S WARRANTY. Now, download this CAD file and get it 3D printed in any material of your liking, we suggest ONYX.
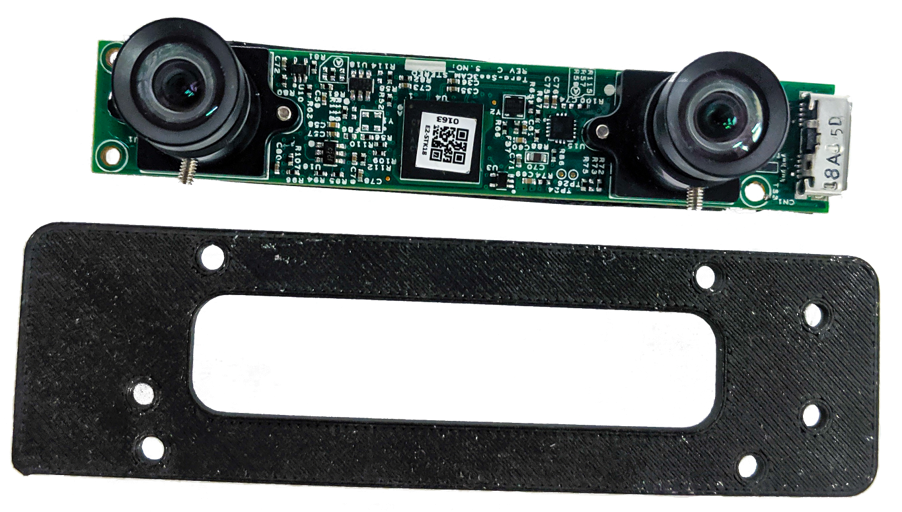
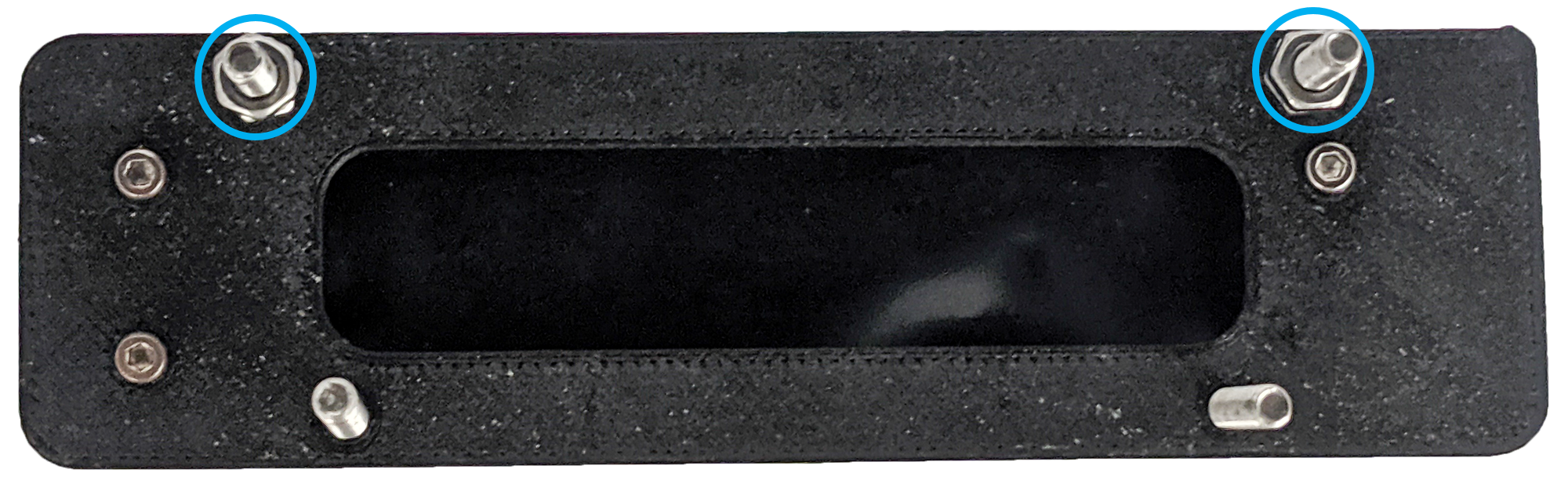
- Now, add mounting screwws to the 3D printed Tara mount. You'll need 3 x 12 mm M2 screws and 3 nuts (1 per screw).

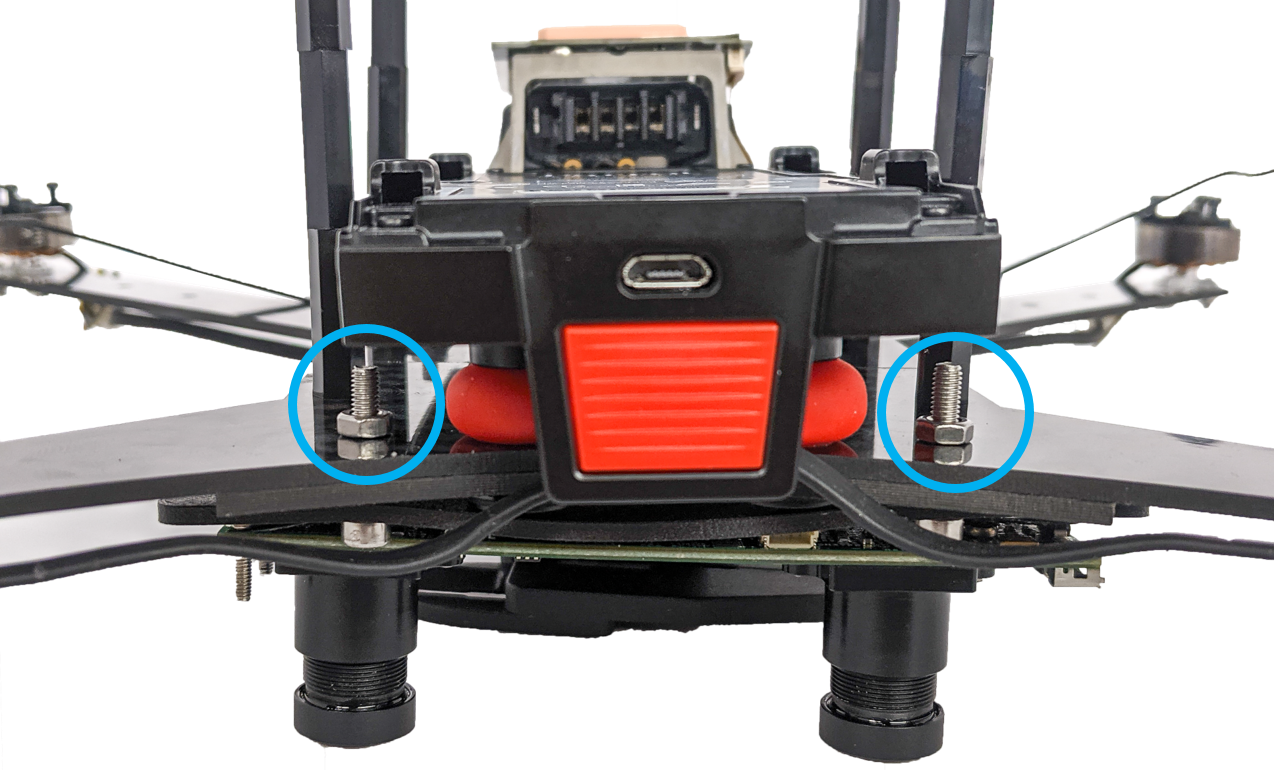
- Attach the Tara camera onto it's 3D printed mount. Then add M3 screws to attach the mount to Husky frame ( We'll use 4 x 16 mm M3 screws for this).

- Use 2 M3 nuts as spacers on back side for each top screw. This is needed since the bottom part is lifted by the black discs used for bushings.
- Mount the Tara to base plate with M3 nuts as necessary.
- Use electrical tape to secure motor cables to the base.

- Attach the antenna and secure the antenna to the base with electrical tape.

- Download the CAD file from here and get it 3D printed in any material of your liking, we suggest ONYX. Now, mount the Intel Up board to it's 3D printed bracket using 4 x 6 mm M2 screws and nuts.

- Secure the bracket onto the M3 nylon spacers on the PRG Husky and secure them with 4 x 6 mm M3 F-F Nylon standoffs.

- Remove the original brass spacers and screws from the leopard imaging camera. The download this CAD file and get it 3D printed in any material of your liking, we suggest ONYX. Now, use 4 x 20 mm M2 screws to attach the mono camera casing to the camera.

- Screw the camera to the base. Be careful and tighten each screw a few turns and rotate the sequence. Do not try to tighten one screw at a time completetly, this will break the camera PCB and the mount.

- Download the CAD files from here and get 4 copies of the landing legs 3D printed in any material of your liking, we suggest ONYX. Attach the landing legs using 2 x 16 mm M2 bolts and nuts per leg.
- Now, let's do a flight test of our "almost" complete PRG Husky.

- Go to your app store (apple store for iOS or google play store for andoroid) on your phone and download the Parrot Free Flight Pro app.

Now, switch on your PRG Husky in a netted area, connect to the parrot's WiFi on your phone and open the free flight app. Fly the PRG Husky around in Video mode (don't use sport mode just yet as it can make the quadrotor unstable due to all the added weight). Test for movement in all axes (front and back, up and down, left and right). Make sure all the movement work as expected. PRG Husky will not be as stable as bebop was because we haven't tuned the gains yet. Do not worry as long as it's not crashing.
A sample flight test video is shown below:
ADD VIDEO!!!!
- Now, let's add the power supply for our Intel Up Board. Before proceeding, disconnect the battery (THIS IS IMPORTANT!). Start by removing the screws which connects the GPS unit to the bebop motherboard. Again be gentle as the ribbon cable connecting the GPS unit is very very sensitive and hard to source.

- We need to solder 22 AWG wires for the battery terminals. Be careful and solder quickly as the terminals tend to melt if exposed to heat for a long time. Here, we use a red wire for positive terminal and a black wire for negative terminal for better color coding. Intertwine the battery wires to reduce capacitance. Knot the wires onto the metal bracket for reducing stress on wires in-case of a crash. Use liquid electical tape to insulate the terminals.

Now, put the GPS unit back on.
- The pololu 5V 5A regulator takes in the battery voltage and gives out regulated 5V at a maximum of 5A. Solder the wires from the battery to the Vin ports. Be careful of the polarity.

- Now, use the barrel jack connector and connect it to the Vout ports. The positive of the barrel jack is the inside part and the jacket of the barrel jack is the negative/ground.
- Insulate the bottom part of the pololu regulator with Kapton tape (usage of regular electrical tape here is NOT recommended if you are planning to run computationally heavy stuff on the Up board). Use liquid electical tape to insulate the solder joints.

- Secure the pololu regulator to the Husky frame using electrical tape.

- Plug in a charged battery back in and then plug the barrel jack to the Intel Up board. The blue light should light up and the fan should spin if everything was done correctly.

- Now plug in the USB cables to the cameras and the WiFi module.

- Congratulations! the hardware setup for the PRGHusky is now complete. Now proceed to the software setup.
