Simulation
There are multiple simulations program available such as Gazebo, VREP, Webot (there is model of NASA mars rover there too), or even game engine. Here I will talk about how to build a simulation to run on Gazebo that run with ROS control (cause ROS generally use Gazebo simulation). To understand the simulation files and how they work, you should know about TF, URDF, and ROS control. Going through their tutorial will help significantly.
For Software Team: Know TF, URDF, and ROS Control For Mech Team: Know how to convert Solidworks file (or whatever CAD program you use) into STL file. All we need is a
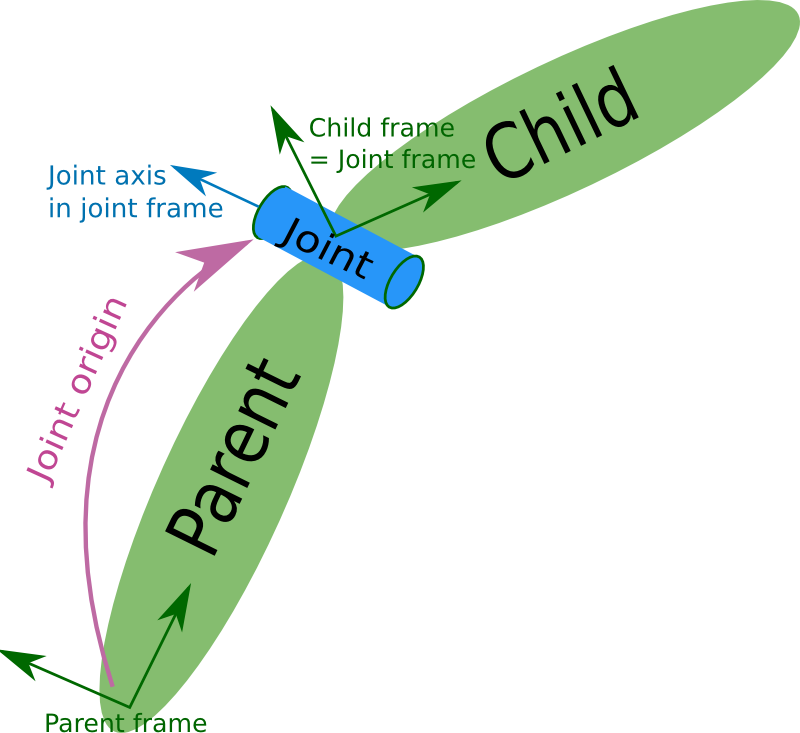
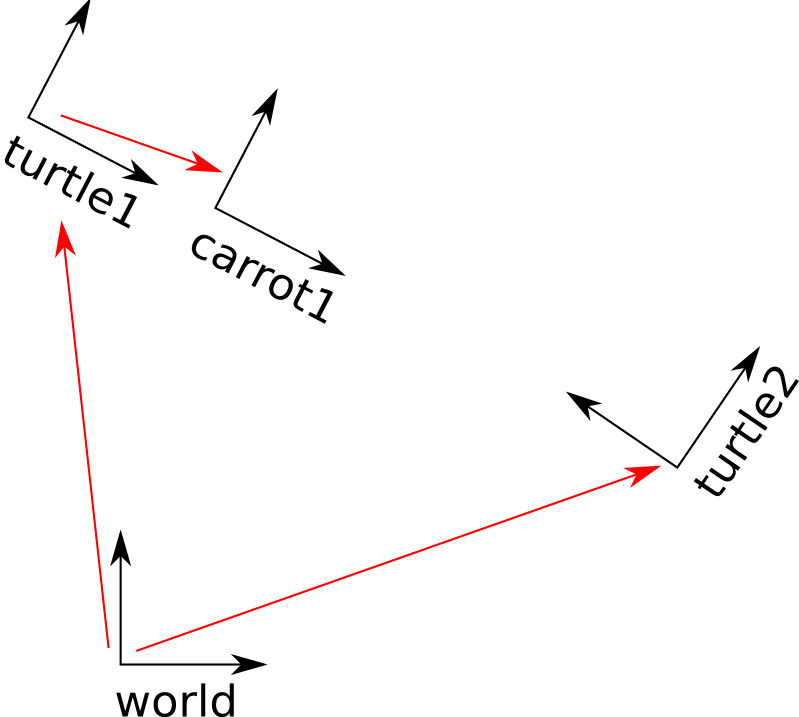
###TF
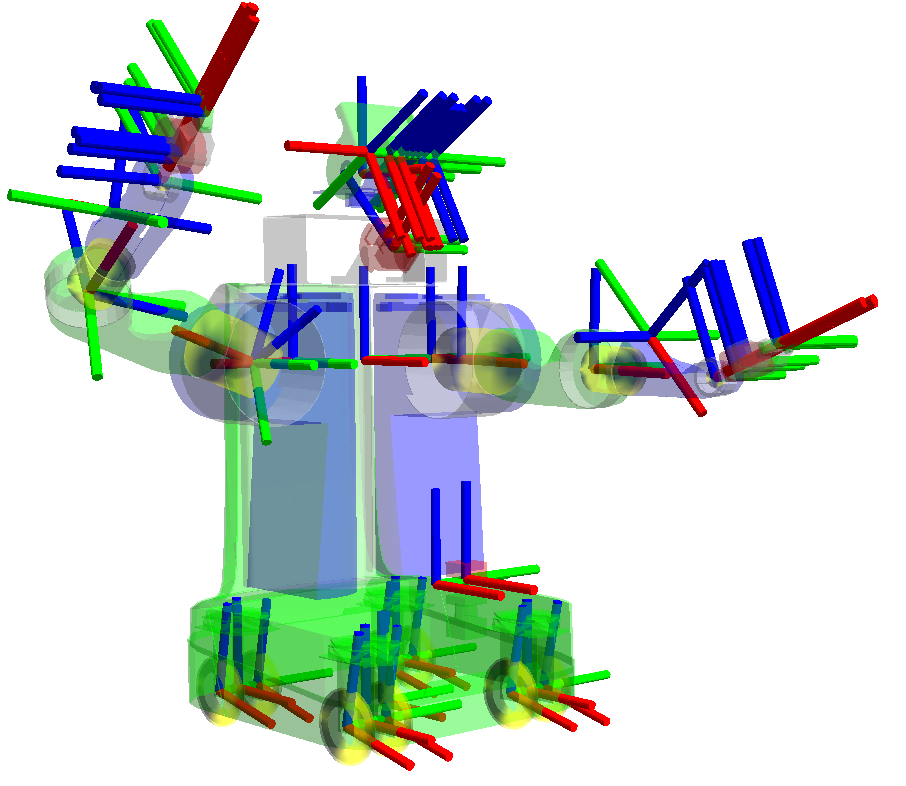
This ROS library pretty much does all the forward and inverse kinematic for you. This will help you understand how the link and joint works as well as where they are when you create a URDF file
##URDF
URDF is a