![]()
ROS package with URDF description macro for Raspberry Pi Mouse
This ROS package was separated from rt-net/raspimouse_sim. See details from rt-net/raspimouse_sim#42.
- Raspberry Pi Mouse
- Linux OS
- Ubuntu Desktop 24.04
- ROS 2
sudo apt install ros-$ROS_DISTRO-raspimouse-description# Create workspace directory
mkdir -p ~/ros2_ws/src && cd ~/ros2_ws/src
# Clone package
git clone -b $ROS_DISTRO https://github.com/rt-net/raspimouse_description
# Install dependencies
rosdep install -r -y -i --from-paths .
# Build & Install
cd ~/ros2_ws
colcon build --symlink-install
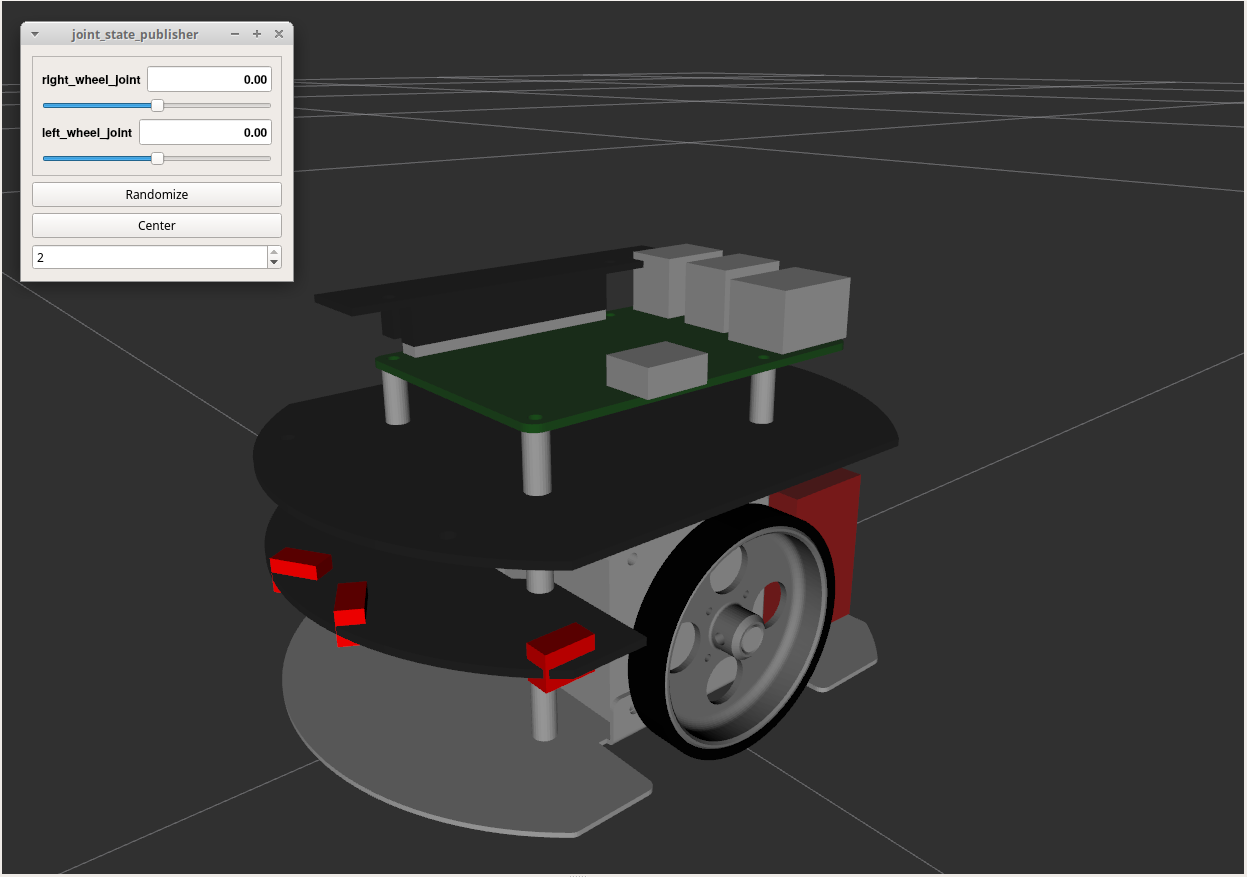
source ~/ros2_ws/install/setup.bashDisplay a Raspberry Pi Mouse robot model on RViz2 with the following command:
ros2 launch raspimouse_description display.launch.pyYou can also display a LiDAR mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py lidar:=rplidarThe lidar option supports urg, lds, and rplidar.
Similarly, display an RGB Camera mounted robot model with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true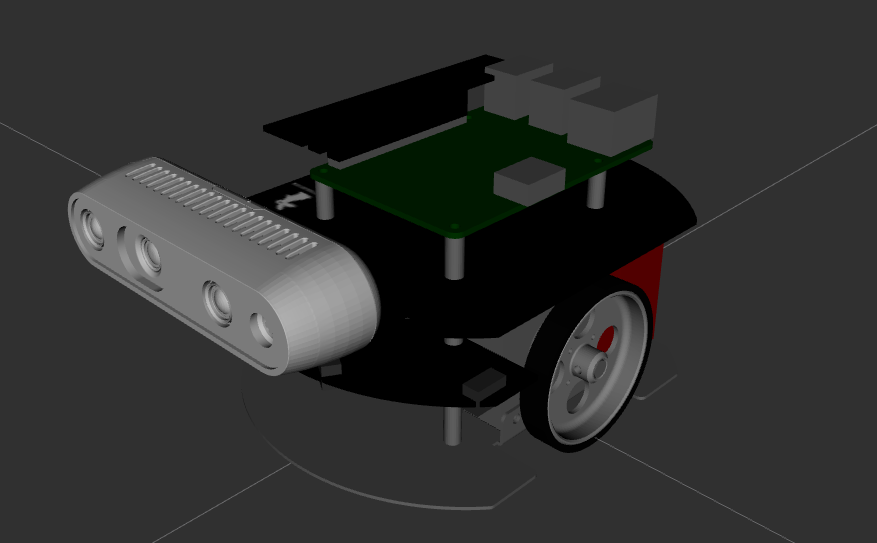
The RGB Camera can be pointed down with the following command:
ros2 launch raspimouse_description display.launch.py use_rgb_camera:=true camera_downward:=true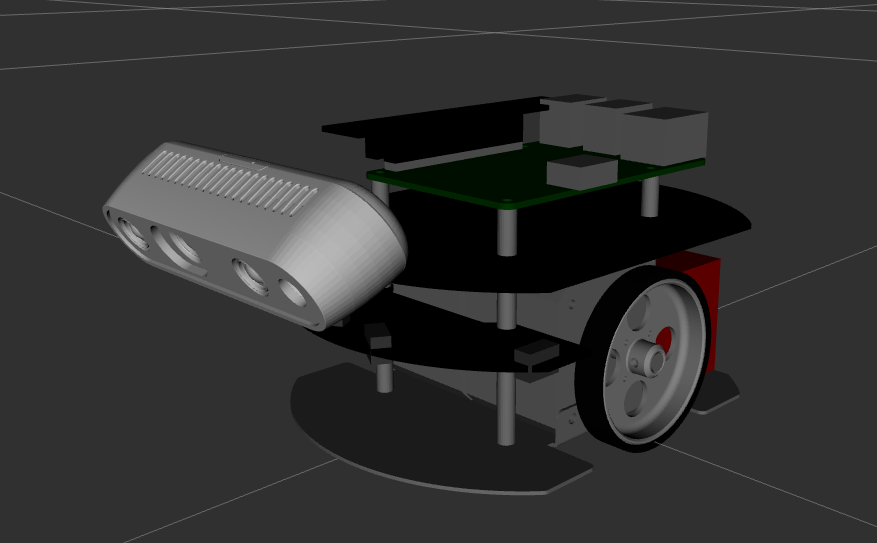
(C) 2016-2025 RT Corporation <[email protected]>
Each file is licensed as stated in their headers.
If no license is specified, the file is licensed under the MIT License.
The full license text is available in the LICENSE file or at https://opensource.org/license/MIT.
Special thanks to https://gbiggs.github.io/rosjp_urdf_tutorial_text/index.html
The file robotis_lds01.stl is released from ROBOTIS and licensed under the Apache License 2.0. The original file is released in turtlebot3_description package.
- This software is open source, but its development is not open.
- This software is essentially provided as open source software on an “AS IS” (in its current state) basis.
- No free support is available for this software.
- Requests for bug fixes and corrections of typographical errors are always accepted; however, requests for additional features will be subject to our internal guidelines. For further details, please refer to the Contribution Guidelines.