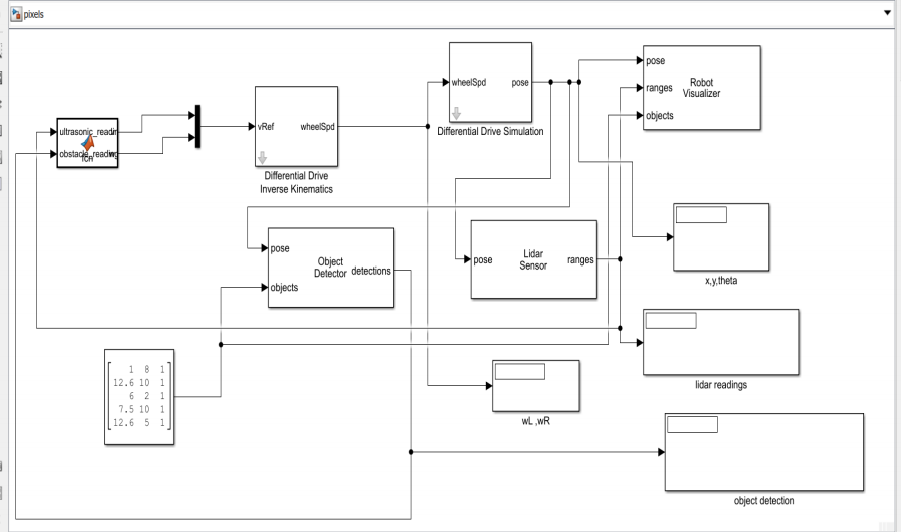
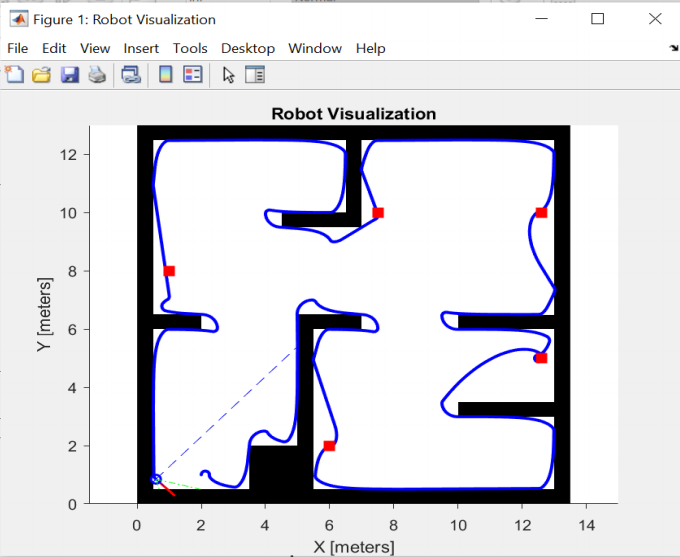
SIMULATION OF LEFT WALL FOLLOWING MOBILE ROBOT The sensors are attached at 90 degress apart to follow the wall and avoid obstacles when the bot comes in range of the object it switches to the object following algorithm The simulation is done via simulink and matlab Wall follower bot
{kind=link}