
![]()

![]()
This repository contains libsinsp, libscap, the kernel module and the eBPF probes sources.
These components are at the foundation of Falco and other projects that work with the same kind of data.
This component stack mainly operates on syscall events. We monitor syscalls using either a kernel module or an eBPF probe, which we call drivers. On top of the drivers, libscap manages the data capture process, while libsinsp enriches the data, and provides a rich set of API to consume the data. Furthermore, these two libraries also implement a plugin framework that extends this stack to potentially any other data sources. For further details, please refer to the official documentation.
An image is worth a thousand words, they say:
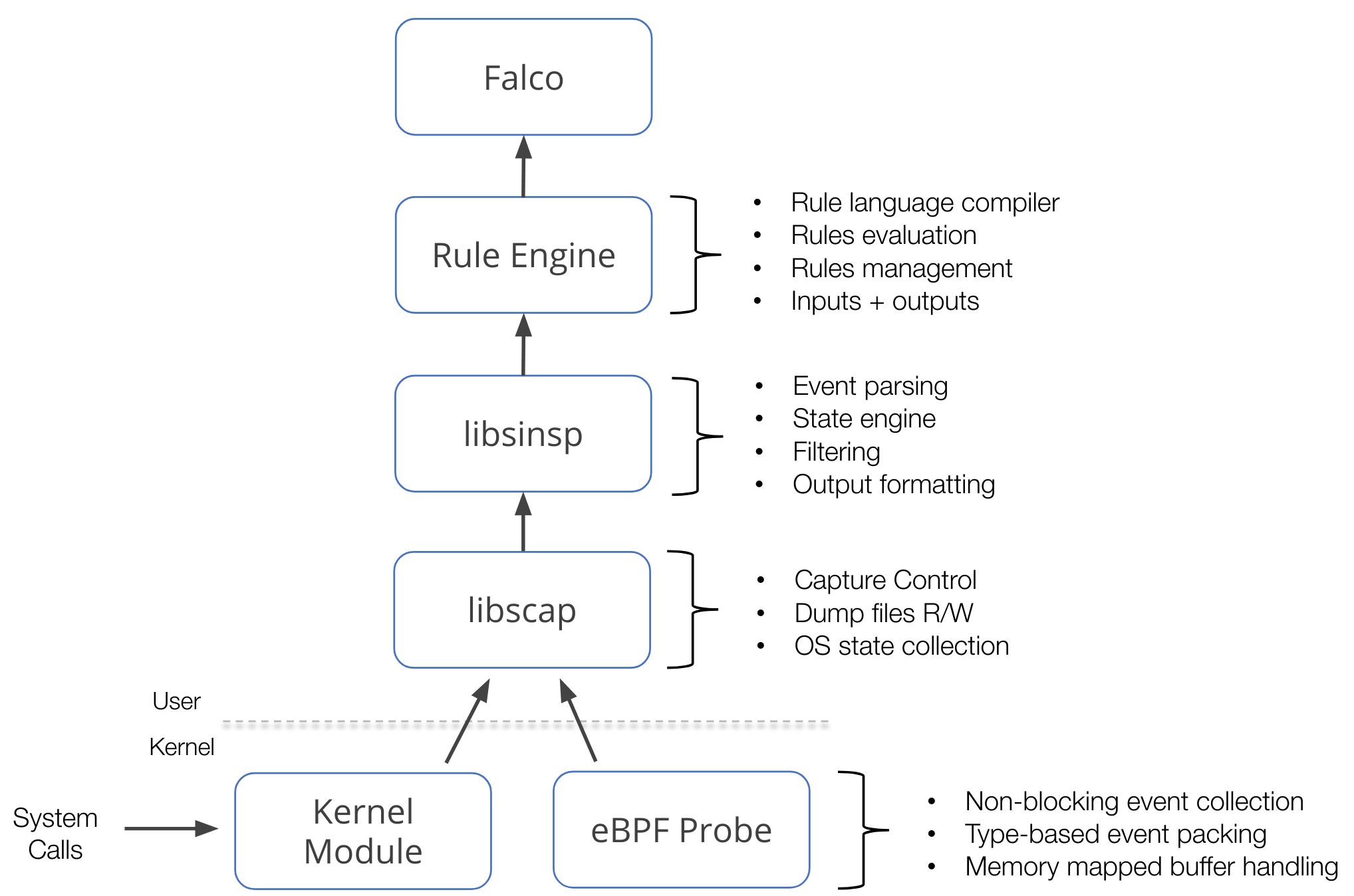
- driver/ contains kernel module and eBPF probe source code, so-called drivers.
- userspace/ contains libscap and libsinsp libraries code.
- libscap (aka lib for System CAPture) is the userspace library that directly communicates with the drivers, reading syscall events from the ring buffer (where drivers place them), and forwarding them up to libsinsp. Moreover, libscap implements OS state collection and supports reading/writing to scap files.
- libsinsp (aka lib for System INSPection) receives events from libscap and enriches them with machine state: moreover, it performs events filtering with rule evaluation through its internal rule engine. Finally, it manages outputs.
- proposals/ unexpectedly contains the list of proposals.
- cmake/modules/ contains modules to build external dependencies, plus the libscap and libsinsp ones; consumers (like Falco) use those modules to build the libs in their projects.
Our drivers officially support the following architectures:
| Kernel module | eBPF probe | Modern eBPF probe | Status | |
|---|---|---|---|---|
| x86_64 | >= 2.6 | >= 4.14 | >= 5.8 | STABLE |
| aarch64 | >= 3.16 | >= 4.17 | >= 5.8 | STABLE |
| s390x | >= 2.6 | >= 5.5 | >= 5.8 | EXPERIMENTAL |
| riscv64 | >= 5.0 | N/A | N/A | EXPERIMENTAL |
| ppc64le | >= 2.6 | >= 5.1 | >= 5.8 | EXPERIMENTAL |
To access up-to-date status reports on Falco drivers kernel testing, please visit this page. It provides a list of supported syscalls as well as the report.
NOTE: while we strive to achieve maximum compatibility, we cannot assure that drivers correctly build against a new kernel version minutes after it gets released, since we might need to make some adjustments.
To get properly notified whenever drivers stop building, we have a CI workflow that tests the build against the latest mainline kernel (RC too!)
NOTE: STABLE state means that we have CI covering drivers tests on the architecture. EXPERIMENTAL means that we are not able to run any CI test against it.
Expand Versioning Details
This project utilizes two different numbering series for the libs and drivers components, both in accordance with Semantic Versioning 2.0.0. In particular, the drivers component versions include a driver suffix in the build metadata part of the SemVer string (ie. 5.1.0+driver) to differentiate them from the libs versions (ie. 0.12.0). Further details about how we manage the versioning of these components can be found in our release process documentation.
When building this project from a Git working directory, the build system (see CMakeLists.txt) will automatically determine the correct version for all components.
For officially released builds, the corresponding Git tag will be used as the version.
For development versions, the following schema is applied:
<x>.<y>.<z>-<count>+<commit>[-driver]
Where:
<x>.<y>.<z>represents the next version number, reflecting either a patch for release branches or a minor version for development branches.<count>is the number of commits ahead from either:- the latest tag on the branch, for release branches; or
- the closest common ancestor with the branch holding the latest tagged version, for development branches.
<commit>refers to the first 7 digits of the commit hash.[-driver]is an optional suffix used specifically for driver versions.
For example, 0.13.0-2+abcdef0 means that the current HEAD (G, commit hash abcdef0) is the second commit ahead of the common ancestor (E) with the release branch that holds the tag for 0.12.0 (C):
A---B---C (tag: 0.12.0, branch: release/0.12.x)
/
D---E---F---G (HEAD -> abcdef0)
This scheme ensures the correct precedence when comparing build version numbers, regardless of whether they are released or development builds.
If you are building this project outside of a Git working directory, or if you want to override the version numbers, you must correctly set the appropriate cmake variables. For example, use -DFALCOSECURITY_LIBS_VERSION=x.y.z -DDRIVER_VERSION=a.b.c+driver.
Expand Build Instructions
For your convenience, we have included the instructions for building the libs modules here, in addition to the information available in the official documentation. These instructions are designed for building and testing libs on your own Linux development machine. However, if you intend to adopt CI or build within containers, there are additional considerations to take into account. The official website continually extends its guidance in this respect.
The project utilizes the cmake build system, and the key make targets are as follows:
driver-> build the kmodbpf-> build the eBPF probescap-> build libscap (modern_bpfdriver will be bundled intoscapif enabled)sinsp-> build libsinsp (depends uponscaptarget)scap-open-> build a small example binary forlibscapto test the drivers (dependent onscap)sinsp-example-> build a small example binary forlibsinspto test the drivers and/orlibsinspfunctionality (dependent onscapandsinsp)
You can refer to the main CMakeLists.txt file to explore the available targets and flags.
To start, first create and move inside build/ folder:
mkdir build && cd buildThe easiest way to build the project is to use BUNDLED_DEPS option (enabled by default),
meaning that most of the dependencies will be fetched and compiled during the process:
cmake -DUSE_BUNDLED_DEPS=ON ../;
make sinspNOTE: Take a break as this will take quite a bit of time (around 15 mins, dependent on the hardware).
To build using the system deps instead, first, make sure to have all the needed packages installed. Refer to the official documentation.
cmake -DUSE_BUNDLED_DEPS=OFF ../;
make sinspNOTE: Using system libraries is useful to cut compile times down, as this way it will only build libs, and not all deps. On the other hand, system deps version may have an impact, and we cannot guarantee everything goes smoothly while using them.
To build the kmod driver, you need your kernel headers installed. Check out the official documentation.
make driver
# Verify the kmod object code was created, uses `.ko` extension.
ls -l driver/src/scap.ko;To build the eBPF probe, you need clang and llvm packages and you also need your kernel headers installed. Check out the official documentation.
cmake -DBUILD_BPF=ON ../;
make bpf
# Verify the eBPF object code was created, uses `.o` extension.
ls -l driver/bpf/probe.o;WARNING: clang-7 is the oldest supported version to build our BPF probe.
Initial guidance for CI and building within containers: To build either the kmod or eBPF probe in a container, you will need to make the extracted kernel headers available. The test/vm directory contains example scripts demonstrating how to pass them to the make command using the argument KERNELDIR=${EXTRACTED_KERNEL_HEADERS_DIR}. You can also use the falcosecurity/driverkit or explore the scripts within the driverkit repository. The mentioned resources also provide candidate builder containers.
To build the modern eBPF probe, further prerequisites are necessary:
-
A recent
clangversion (>=12). -
A recent
bpftoolversion, typingbpftool genyou should see at least these features:Usage: bpftool gen object OUTPUT_FILE INPUT_FILE [INPUT_FILE...] <--- bpftool gen skeleton FILE [name OBJECT_NAME] <--- bpftool gen helpIf you want to use the
bpftoolmirror repo, version6.7should be enough.If you want to compile it directly from the kernel tree you should pick at least the
5.13tag. -
BTF exposed by your kernel, you can check it through
ls /sys/kernel/btf/vmlinux. You should see this line:/sys/kernel/btf/vmlinux -
A kernel version >=
5.8.
NOTE: These are not the requirements to use the modern BPF probe, but rather for building it from source.
Regarding the previously discussed bpf drivers, they create a kernel-specific object code (driver/bpf/probe.o) for your machine's kernel release (uname -r). This object code is then used as an argument for testing with scap-open and sinsp-example binaries.
However, the modern BPF driver operates differently. It doesn't require kernel headers, and its build isn't tied to your kernel release. This is enabled by the CO-RE (Compile Once - Run Everywhere) feature of the modern BPF driver. CO-RE allows the driver to work on kernels with backported BTF (BPF Type Format) support or kernel versions >= 5.8.
To comprehend how the driver understands kernel data structures without knowledge of the kernel it runs on, there's no black magic involved. We maintain a vmlinux.h file in our project containing all necessary kernel data structure definitions. Additionally, we sometimes rely on macros or functions typically found in system header files, which we redefine in struct_flavors.h.
That being said, the modern BPF driver still produces an object file, which you can create using the target below. Nevertheless, we ultimately include it in scap regardless. Hence, when modern BPF is enabled, building scap will already cover this step for you.
cmake \
-DUSE_BUNDLED_DEPS=ON \
-DBUILD_LIBSCAP_MODERN_BPF=ON ../;
make ProbeSkeleton
# Verify the modern eBPF object code / final composed header file including all `.o` modern_bpf files was created, uses `.h` extension.
ls -l skel_dir/bpf_probe.skel.h;
# Now includes skel_dir/bpf_probe.skel.h in `scap` during the linking process.
make scapInitial guidance for CI and building within containers: The Falco Project, for instance, compiles the final Falco userspace binary within older centos7 falco-builder containers with bundled dependencies. This ensures compatibility across supported systems, mainly due to GLIBC versions and other intricacies. However, you won't be able to compile the modern BPF driver on such old systems or builder containers. One solution is to build skel_dir/bpf_probe.skel.h in a more recent builder container. For example, you can refer to this container as a guide. Subsequently, you can provide the modern BPF header file as an artifact to scap during building in an older builder container. As an illustrative example, we use /tmp/skel-dir containing the bpf_probe.skel.h file.
cmake \
-DUSE_BUNDLED_DEPS=ON \
-DBUILD_LIBSCAP_MODERN_BPF=ON \
-DMODERN_BPF_SKEL_DIR="/tmp/skel-dir" ../;Libscap contains additional library functions to allow integration with system call events coming from gVisor.
Compilation of this functionality can be disabled with -DBUILD_LIBSCAP_GVISOR=OFF.
Expand Testing Instructions
This repository includes convenient test example binaries for both scap and sinsp:
scap-open-> build a small example binary forlibscapto test the drivers (dependent onscap), checkout the program's documentationsinsp-example-> build a small example binary forlibsinspto test the drivers and/orlibsinspfunctionality (dependent onscapandsinsp), checkout the program's documentation
When developing new features, you would run either one depending on what you're working on, in order to test and validate your changes.
NOTE: When you're working on driver development, it can be quite useful to make use of the kernel's built-in
printkfunctionality. However, for the traditional bpf driver, you'll need to uncomment a line in the bpf Makefile first and use a dedicated build flagBPF_DEBUG. For modern BPF, use the build flagMODERN_BPF_DEBUG_MODE. Any logs generated bybpf_printk()will be written to/sys/kernel/debug/tracing/trace_pipe. Just make sure you have the right permissions set up for this.
Here's an example of a cmake command that will enable everything you need for all tests and components. By default, the following flags are disabled, with the exception of USE_BUNDLED_DEPS and CREATE_TEST_TARGETS (they are enabled by default).
cmake \
-DUSE_BUNDLED_DEPS=ON \
-DBUILD_LIBSCAP_MODERN_BPF=ON \
-DBUILD_LIBSCAP_GVISOR=ON \
-DBUILD_BPF=ON \
-DBUILD_DRIVER=ON \
-DMODERN_BPF_DEBUG_MODE=ON \
-DBPF_DEBUG=ON \
-DCREATE_TEST_TARGETS=ON \
-DENABLE_LIBSCAP_TESTS=ON \
-DENABLE_DRIVERS_TESTS=ON \
-DENABLE_LIBSINSP_E2E_TESTS=ON \
-DENABLE_VM_TESTS=ON ../;NOTE: The
ENABLE_LIBSINSP_E2E_TESTSflag enables the new e2e tests for libsinsp. Please keep in mind these tests are currently in heavy development and need some extra steps (see in the section below) to run correctly.
TIP: Installing and using the package
ccachecan optimize repeated testing, but we don't offer official support or testing for it.
nproc=$(grep processor /proc/cpuinfo | tail -n 1 | awk '{print $3}');
rm -f driver/bpf/probe.o; make bpf;
rm -f driver/src/scap.ko; make driver;
# scap-open binary
rm -f libscap/examples/01-open/scap-open; make -j$(($nproc-1)) scap-open;
# sinsp-example binary
rm -f libsinsp/examples/sinsp-example; make -j$(($nproc-1)) sinsp-example;These are the conventional unit tests that our CI system enforces:
# sinsp traditional unit tests
make -j$(($nproc-1)) unit-test-libsinsp;
# Run
make run-unit-test-libsinsp;
# scap traditional unit tests
make -j$(($nproc-1)) libscap_test;
# Run
sudo ./test/libscap/libscap_test;Specialized driver tests can be found in test/drivers, but please be aware that certain limitations might apply, and we're making every effort to ensure compatibility across various distributions. Our CI system also enforces these tests, but do note that currently, the CI system for driver tests is designed exclusively for Ubuntu. Therefore, if you encounter some test failures that aren't related to your changes, don't worry too much.
make -j$(($nproc-1)) drivers_test;
# Run each drivers test via changing flags
sudo ./test/drivers/drivers_test -m;The tests mentioned below expand beyond the scope of "unit tests". In this context as well, we are dedicated to making sure they run smoothly on your localhost for pre-PR testing, to the best of our ability:
- test/e2e - enforced by our CI
- test/vm - our CI includes comparable tests, but it employs a distinct framework. For current status reports on Falco drivers kernel testing, please visit this page.
As mentioned earlier, The Falco Project's libs repository includes numerous CI-powered checks. For the most current information, please refer to the CI definitions under the workflows directory.
To correctly run the new libsinsp e2e tests on x86_64 gcc-multilib and g++-multilib are needed. To run the tests, use the following commands:
make -j$(($nproc-1)) libsinsp_e2e_tests;
# Run each drivers test via changing flags
sudo ./test/libsinsp_e2e/libsinsp_e2e_tests -m;Please refer to the contributing guide and the code of conduct for more information on how to contribute.
For code contributions to this repository, we kindly ask you to carefully review the Build and Testing sections.
This project is licensed to you under the Apache 2.0 open source license. Some subcomponents might be licensed separately. You can find licensing notices here.