Module Loss Gilbert Elliot Loss
The Gilbert-Elliot loss module implements a continuous time Gilbert-Elliot model [1, 2]. The Gilbert-Elliot model is a Markov process that models burst losses on a communication channel. The model contains two states, one for the channel being in a good state and one for the channel being in a bad state. Each of the two states has a configurable packet loss rate. The sojourn times in the states are negative exponentially distributed with configurable means.

In FlowEmu, the model is parametrized using the four parameters e_0, e_1, p_01 and p_10. e_0 and e_1 are the packet loss probability in percent in state 0 and 1, respectively. p_01 is the rate for switching from state 0 to state 1 given in 1/ms. Therefore, a value of p_01 = 0.001 1/ms results in a mean sojourn time of 1 second in state 0 before switching to state 1. Accordingly, p_10 is the rate for switching from state 1 to state 0.
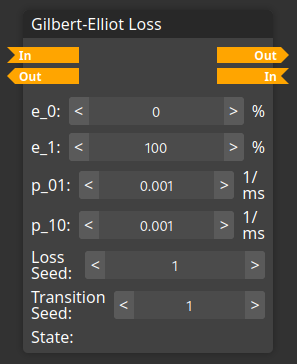
The module has inputs and outputs in both directions to apply the same loss probability to both directions of bidirectional traffic.
The state switches and the packet losses are generated using two independent pseudo random number generators. The seed of each of them is configurable separately. This ensures that a given seed for the transitions always results in the same sequence of state lengths independent of the number of packets passing through the model.
- E. N. Gilbert, “Capacity of a burst-noise channel,” The Bell System Technical Journal, vol. 39, no. 5, pp. 1253–1265, Sep. 1960, doi: 10.1002/j.1538-7305.1960.tb03959.x
- E. O. Elliott, “Estimates of error rates for codes on burst-noise channels,” The Bell System Technical Journal, vol. 42, no. 5, pp. 1977–1997, Sep. 1963, doi: 10.1002/j.1538-7305.1963.tb00955.x