An interface for ST Microelectronics STEVAL-FCU001V1 drone.
- XBOX Control
- Position setpoint generator
- Dynamic gain tuning (not implemented yet)
- Real-time data tx/rx
- Mechanism to switch between various controllers/estimators both on and off-board (not yet implemented)
- Launch Motive, and follow the setup information here and video tutorial here in order to calibrate, create a rigid body, and stream pose data.
- Once Motive has been setup to stream data to the base station, you will need to download the NatNetSDK from Optitrack's website. Our Matlab script can then load the library required to interface with Motive's data stream. When initializing MocapAPI class, provide a correct file path to the NatNetSDK.
Drone IDs: C02835321733, C0286e325133
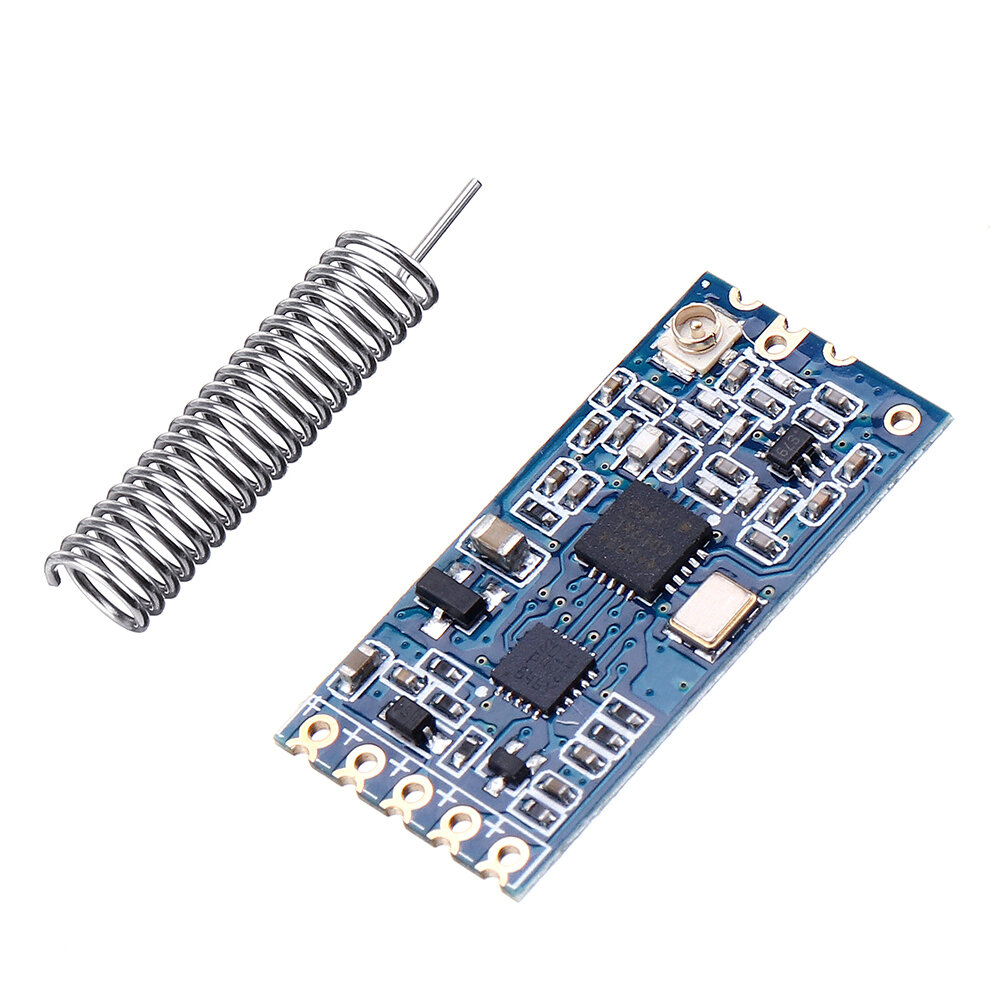
The HC12 is a radio transceiver with millisecond precise data transfer rates. This module comes ready with a pre-programmed microcontroller and wireless communication chip. All that's left to do, is interface with it through the simple UART protocol. By placing the HC12 into programming mode, we can send AT commands to adjust various setting such as the frequency to transmit/receive on, as well as the baudrate to operate UART on for data I/O. Useful instructions for this module can be found on this allaboutcircuits post, and the orignal datasheet can be found here. Follow the instructions below to set it up for use with the ST drone:
- A USB to TTL serial cable should connect the HC12 to the base station. Plug the USB end into the computer, and connect the rest of the lines to the appropriate pins on the radio module. If using the 5V line of the cable to power the HC12, a diode should be placed in series so as to drop the voltage to below 4.5V as stated in the datasheet. Connect the SET pin to ground in order to enter programming mode. While in programming mode, the base station can send the HC12 AT commands to configure the module.
- Set the baud rate to the default of 9600, and send "AT+DEFAULT". You should receive an "OK" acknowledgement which means the radio successfuly reset to default settings.
- Now, change the operating baud rate to 19200 by sending "AT+B19200". Again, if successful, the base station should read back an "OK".
- Finally, we need to make sure each pair of HC12's are listening to eachother. Set frequency channel with "AT+C001". If using multiple pairs of radios, stagger than channels at least 5 apart. Ie. when using a new pair of HC12's, use the command AT+C006.
- Remove the SET pin from ground, and repeat steps 1 through 5 with the second HC12 transceiver. Only one HC12 will be connected to the base station, however, the other should be configured in the same way.
Once two HC12 modules have been configured identically, connect one to the base station via the USB to TTL cable, and one to the ST drone via the UART pins. This radio will handle receiving attitude commands as well as data update requests from the base station. The flow of data using the HC12 is always such that data transmits from the base station, and is received on the ST drone.
Run the ... to verify communication works (MAKE MY OWN SCRIPT TO CHECK RADIO COMMS)
While the HC12 handles consistently fast communication from the base station to the drone, a Bluetooth module is required to receive data being sent from the drone to the base station. This is useful for fetching data from the drone in real time which is necessary in many situations. In order to start receiving data, you need to check the MAC address of the flight control unit and use this to create a BLE class object. You can then use Matlab's BLE read callback in order to receive data as it is sent during a flight.
An Xbox controller was introduced to this project in order to 1) act as a form of manual override, and 2) enable the quadrotor to be controlled in unconventional ways such as by switching between positional setpoints, or even control position/velocity with the joystick itself. This extends the capabilities of the ST drone past the original intentions of just controlling attitude with the phone app. The current Xbox control configuration is provided in the figure below, however, thease features can be changed or built upon in order to meet your own experiment requirements.

This interface is designed to allow for real time communication to/from the drone. The HC12 acts as the channel for communication from the base station to the drone, and the Bluetooth module is the channel from drone to base station. This section will touch on some of the details of both channels.
Bluetooth sends information over what is known as a "characteristic". There are three bluetooth characteristics that transfer data off of the drone. One characteristic sends battery level information, another sends pressure sensor data, and the third sends 20 bytes of IMU data. This is the characteristic with the largest capacity of data to send, which is why we chose to listen to data coming over this channel. It may be possible to create another characteristic onboard to send over as much data as we'd like, however, this process seems complicated, so we've decided to simply swap out IMU data for any data we want to send.
Another caveat to sending data over this bluetooth characteristic is that we can only send two bytes worth of data in integer form. This means that if we want to preserve floating point information, we need to scale the integer we send by an appropriate factor. This also requires us to know in advance at the base station what that scale factor is so that we can extract the correct floating point information from the integer. This is handled in the parseBLE() function.
The HC12 handles sending both attitude commands and what we call "data update requests" to the drone. Each of these tranmissions will follow a specific packet protocol in order for the drone to understand what to do with the information. Data update requests allow us to command the drone to do things like arm itself, switch mode controls, or even dynamically tune gains. The structure is setup in an easily expandable way such that we can tell the drone to do whatever we want with internal memory, rather than only able to send attitude commands. This packet structure is provided in the table below:
| Packet | Description |
|---|---|
| [startByte, yawCmd, thrustCmd, rollCmd, pitchCmd, endByte] | An attitude command |
| [startByte, startByteDR, endByteDR, dictKey, value, endByte] | A data update request, where dictKey acts as the indicator of what to do, and value is a value associated with that task |
While the table above provides the general packet structure, the next table describes current data update request capabilities of our drone firmware.
| Data Update Request | Description |
|---|---|
| [startByte, startByteDR, endByteDR, 1, x, endByte] | Arm the drone if x=1, disarm if x=0 |
| [startByte, startByteDR, endByteDR, 2, x, endByte] | Calibrate if x=1 |
| [startByte, startByteDR, endByteDR, 3, x, endByte] | Switch onboard control mode to x: AOMC=0, MOMC=1, EOMC=2 |
This structure can clearly be extended into implementing hybrid like control strategies where we wish to switch from one controller to another based on feedback received at the base station level.
To begin running experiments, connect the Xbox controller to the computer via the wireless USB dongle. We cannot fly the drone autonomously unless there is an Xbox controller connected. This is for safety purposes as the Xbox controller is our only method of manually overiding the drone. Next, run 'position_control_main.m'. This is our main flight control script. Once run, it will connect to the Xbox controller and wait for a calibration and arm command. Once armed, the drone will begin receiving commands and autonomous flight will proceed. Follow the XBOX control section above to understand how to control the drone in the air.