Motors
In Phobos, most motor information is already given by the joints (torque, velocity limits e.g.). For further motor related stuff each joint/link may also hold motor parameters. This can include it's control type, and the controller parameters. This info will be also exported to SDF and SMURF. Of course you can add further information that will be stored to SMURF.
Motors are added to Phobos joints, so you need to select a well-defined joint. Use the Add motor operator in the Hardware tab:
This will open a motor selection menu. The categories and motor types are based on the parsed definitions from your definition folder. The new motor will be added to all selected joints.
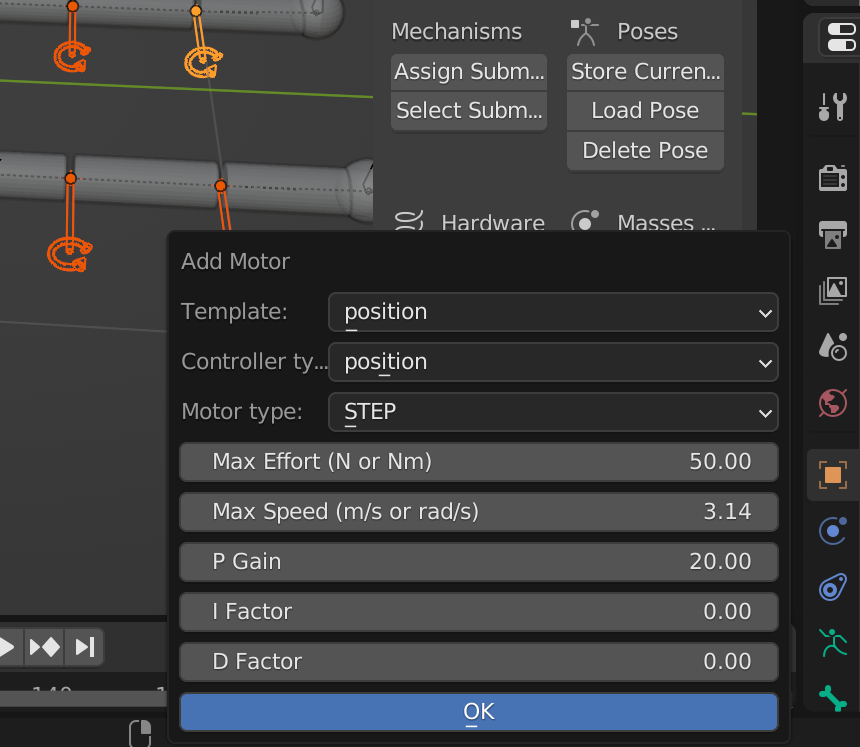
After confirming this dialog, the motor info will be added to the joint(s).
For further details see the custom definition section of this wiki.
![]() Back to top.
Back to top.