This repository has been archived by the owner on May 27, 2022. It is now read-only.
Home
Welcome to the gajena/roc_the_saviour wiki!
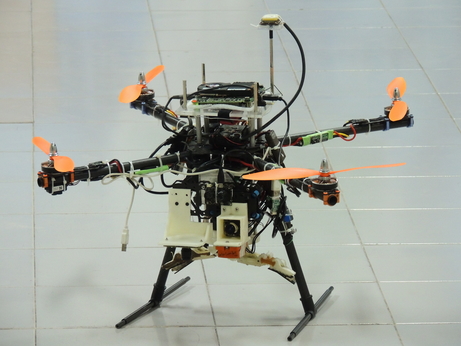
This repository presents an open source cost-effective visual inertial navigation based search and rescues MAV's software for exploration in an unknown environment using lightweight vision based open source method and searching, picking, and disposal of peril objects using versatile gripper.
We wish to hear your feedback in order to improve this project and fix some possible bugs. Please let us know about your developments!
Use the sidebar on the right to navigate through the Wiki.




- Movidius : 80$ (amazon.com)
- Tarot Ironman 650: 105$ (Robotshop)
- Pixhawk : 280$ (Robotshop)
- mv_bluefox mlc200w(with lens): 500$ approx (our quotation price)
- Motors(4)+battery(1) : 350$ approx (our bought price)
- Intel NUC : 400$ (https://www.intel.com/content/www/us/en/products/boards-kits/nuc/kits.html)
- RAM+SSD: 300$
- Dynamixel : 300$ (our purchase price)
- PS3 camera: 8$ (amazon.com)
- XSENS IMU: 900$
- TF mini lidar: 39$ (seed studio)
- ESCs: 80$ approx (our purchase)
(assuming gripper 3D printing will cost approx: 100$ per unit)
The total price is: 3400$ approx (with XSENS)
- Videos Links ( pick and fly + outdoor + indoor exploration + failure recovery + dense reconstruction )
- safety checks
- Every package details(with available alternatives) + movidius also
- Alternate harware possibility
- 3-D CAD models
- Price List
- Assembly explanation + images