This repository provides implementation using sparse convolution backbone. It represents the official implementation of the paper:
*Shengyu Huang, *Zan Gojcic, Mikhail Usvyatsov, Andreas Wieser, Konrad Schindler
|ETH Zurich | * Equal contribution
For more information, please see the project website
If you have any questions, please let us know:
- Shengyu Huang {[email protected]}
- Zan Gojcic {[email protected]}
- 2021-03-12: pre-trained model release
- 2021-02-28: codebase release
This code has been tested on
- Python 3.8.5, PyTorch 1.7.1, CUDA 11.2, gcc 9.3.0, GeForce RTX 3090/GeForce GTX 1080Ti
To create a virtual environment and install the required dependences please run:
git clone https://github.com/ShengyuH/OverlapPredator.Mink.git
virtualenv predator; source predator/bin/activate
cd OverlapPredator.Mink; pip install -r requirements.txtin your working folder.
If you come across problem when installing MinkowskiEngine, please have a look here
After creating the virtual environment and downloading the datasets, Predator can be trained using:
python main.py configs/train/indoor.yamlIf you find this code useful for your work or use it in your project, please consider citing:
@article{huang2020predator,
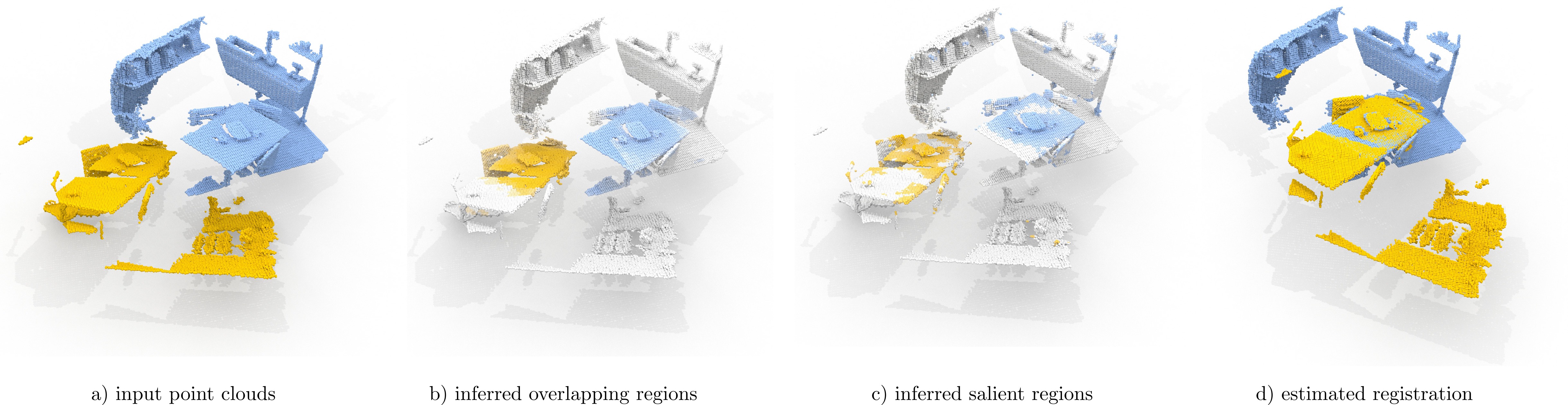
title={PREDATOR: Registration of 3D Point Clouds with Low Overlap},
author={Shengyu Huang, Zan Gojcic, Mikhail Usvyatsov, Andreas Wieser, Konrad Schindler},
journal={CVPR},
year={2021}
}In this project we use (parts of) the official implementations of the followin works:
- FCGF (KITTI preprocessing)
- D3Feat (KPConv backbone)
- 3DSmoothNet (3DMatch preparation)
- MultiviewReg (3DMatch benchmark)
- SuperGlue (Transformer part)
- DGCNN (self-gnn)
- RPMNet (ModelNet preprocessing and evaluation)
We thank the respective authors for open sourcing their methods. We would also like to thank Reviewer 2 for valuable inputs.