MicroPython: Servo sg90
The sg90 servo has three wires: brown (gnd), red (vcc), and yellow (signal). The vcc is the power source for the servo, and it has to be connected to the vin pin of our board – this way it is connected directly to the USB port, and not powered through the board.
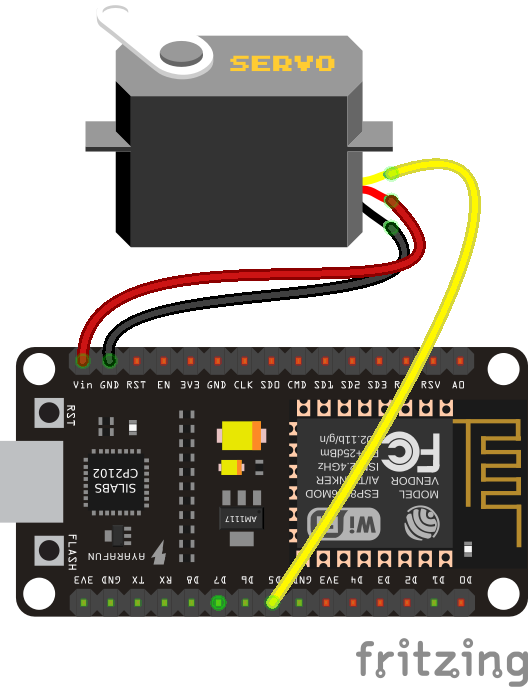
The signal wire tells the servo what position it should move to, using a 50Hz PWM signal. The center is at around 77, and the exact range varies with the servo model, but should be somewhere between 30 and 122, which corresponds to about 180° of movement. Note that if you send the servo a signal that is outside of the range, it will still obediently try to move there – hitting a mechanical stop and buzzing loudly. If you leave it like this for longer, you can damage your servo, your board or your battery, so please be careful.
So now we are ready to try and move it to the center position:
from machine import Pin, PWM
servo = PWM(Pin(14), freq=50, duty=77)
Then we can see where the limits of its movement are:
servo.duty(30)
servo.duty(122)
Ref: http://micropython-on-esp8266-workshop.readthedocs.io/en/latest/basics.html#servomechanisms